仿生手装置及其控制方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及仿生假肢技术领域,尤其是涉及一种仿生手装置及其控制方法。
背景技术
仿生手可以作为残疾人截肢后病人解决生活处理问题的主要手段,市场上的产品种类参差不齐,行业中也未有明确的标准要求。
现有的仿生机械手,其动作方式相对简单,通常只有张开和闭合两种动作,很难实现较为复杂应用动作,同时,现有仿生机械手与操作者交互的控制灵敏度低,控制准确性差,很难满足复杂应用动作,以及残障人士的多样化需求。
发明内容
本发明的目的在于提供一种仿生手装置及其控制方法,以缓解了现有的仿生机械手动作方式相对简单,很难实现较为复杂应用动作,同时,现有仿生机械手与操作者交互的控制灵敏度低,控制准确性差,无法满足残障人士的多样化需的技术问题。
本发明提供的仿生手装置,包括手指单元、拇指单元、手掌单元、控制单元、转接单元和佩戴单元;所述手指单元安装在所述手掌单元的上端,所述拇指单元安装在所述手掌单元的侧部;
所述手指单元包括手指驱动机构、手指结构和手指检测机构,所述手指驱动机构用于驱动所述手指结构相对于所述手掌单元弯曲或者展开;所述手指检测机构用于检测所述手指结构的位置及压力;
所述拇指单元包括拇指驱动机构、拇指结构和拇指检测机构,所述拇指驱动机构用于驱动所述拇指结构相对于所述手掌单元自身弯曲或者展开,且能够在垂直于所述手掌单元所在平面的平面内朝向所述手掌单元方向转动;所述拇指检测机构用于检测所述拇指结构的位置及压力;
所述手掌单元通过所述转接单元与所述佩戴单元连接,所述佩戴单元用于与待安装结构连接;
所述手指驱动机构和所述拇指驱动机构分别与所述控制单元通讯连接。
进一步的,所述手指检测机构包括第一手指检测机构和第二手指检测机构,所述第一手指检测机构用于检测所述手指单元的转动位置;所述第二手指检测机构用于检测所述手指单元与物体接触时的压力;
所述拇指检测机构包括第一拇指检测机构和第二拇指检测机构,所述第一拇指检测机构用于检测所述拇指单元的转动位置;所述第二拇指检测机构用于检测所述拇指单元与物体接触时的压力;
所述第一手指检测机构、所述第二手指检测机构、所述第一拇指检测机构和所述第二拇指检测机构分别与所述控制单元通讯连接。
进一步的,所述第一手指检测机构和所述第一拇指检测机构为位置传感器;
所述第二手指检测机构和所述第二拇指检测机构为压力传感器或者驱动器扭力反馈机构。
进一步的,所述手指结构包括第一指节、第二指节、手指传动件、手指基座、手指蜗轮和手指蜗杆;
所述第二指节分别与所述第一指节和所述手指基座转动连接,所述手指传动件的一端与所述第一指节连接,所述手指传动件的另一端与所述第二指节连接;所述手指蜗轮与所述手指基座转动连接,且所述手指蜗轮与所述第二指节连接,所述手指蜗杆与所述手指蜗轮啮合,以使所述手指蜗杆能够带动所述第二指节和所述第一指节转动;
所述手指蜗杆的延伸方向与所述第二指节处于展开状态时的延伸方向不共线,且所述手指蜗杆远离所述手指蜗轮的一端向所述第二指节的弯曲方向倾斜。
进一步的,所述手指蜗轮与所述第二指节的相接处设有第一传动结构;
所述第一传动结构包括手指转轴以及设置在所述第二指节上的第一弧形槽,所述手指转轴与所述手指蜗轮固定连接,所述手指转轴滑动连接在所述第一弧形槽内,所述手指蜗轮带动所述手指转轴在所述第一弧形槽内的滑动,从而推动所述第二指节相对于所述手指基座转动。
进一步的,所述第一手指检测机构设置在所述第二指节与所述手指基座的相接处或者设置在所述第二指节与所述第一指节的相接处;
所述第二手指检测机构设置在所述第一指节上。
或者,所述第一指节与所述第二指节的铰接处设置有第一手指复位件;
所述第二指节与所述手指基座的铰接处设置有第二手指复位件。
进一步的,当所述手指单元和所述拇指单元相对于所述手掌单元展开时,所述手指单元、所述拇指单元和所述手掌单元处于同一平面内。
进一步的,所述手指单元的数量为多个,且相邻两个所述手指单元弯曲或者展开的运动轨迹平面之间具有夹角,且当相邻两个所述手指单元由展开状态向弯曲状态转换时,两个所述手指单元的间距逐渐减小;
当所述手指单元处于展开状态时,沿朝向所述手掌单元方向,相邻两个所述手指单元之间的距离逐渐减小,且相邻两个所述手指单元的运动轨迹平面在平行于所述手掌单元所在平面内的投影的夹角为0-3°;
相邻两个所述手指单元的运动轨迹平面在垂直于所述手掌单元所在平面内的投影的夹角为0-3°。
进一步的,所述手指单元和所述手掌单元的相接处设置有第一连接结构,每个所述手指单元均通过一个所述第一连接结构与所述手掌单元可拆卸连接;
多个所述第一连接结构的结构和尺寸相同。
进一步的,所述拇指结构包括拇指基座、拇指蜗轮、拇指蜗杆、第一拇指销轴、以及相互铰接的指节一和指节二;
所述拇指驱动机构包括第一拇指驱动机构和第二拇指驱动机构;
所述拇指蜗轮通过所述第一拇指销轴与所述指节二固定连接,且所述指节二远离所述指节一的一端通过所述第一拇指销轴与所述拇指基座铰接,所述拇指蜗杆和所述第一拇指驱动机构安装在所述指节二的内部,所述第一拇指驱动机构的输出端与所述拇指蜗杆连接,所述拇指蜗杆与所述拇指蜗轮啮合,且所述拇指蜗杆和所述第一拇指驱动机构位于所述拇指蜗轮远离所述拇指基座的一侧;
所述拇指基座与所述手掌单元铰接,所述第二拇指驱动机构的输出端与所述拇指基座连接,用于驱动所述拇指基座、所述指节一和所述指节二在垂直于所述手掌单元所在的平面转动。
进一步的,所述拇指结构还包括连杆,所述连杆的一端与所述指节一铰接,所述连杆的另一端通过缓冲结构与所述指节二连接;
所述缓冲结构包括销轴结构以及设置在所述指节二上的第二弧形槽;
所述连杆远离所述指节一的一端与所述销轴结构连接,所述销轴结构滑动连接在所述第二弧形槽内。
进一步的,所述指节一和所述指节二的铰接处设有第一拇指复位件;
和/或,所述第一拇指销轴与所述拇指基座铰接处设有第二拇指复位件;
和/或,所述拇指基座与所述手掌单元的铰接处设有第三拇指复位件。
进一步的,所述转接单元包括第一转接座、第一转动耳座、第二转动耳座、第一旋转盘和第二旋转盘;所述第一转接座的一端与所述手掌单元连接,所述第一转接座的另一端与所述第一转动耳座连接,所述第一转动耳座通过第一销轴与所述第二转动耳座铰接;所述第二转动耳座与所述第一旋转盘固定连接,所述第一旋转盘通过第二销轴与所述第二旋转盘转动连接,所述第二旋转盘与所述佩戴单元连接;
或者,所述转接单元包括第二转接座、球铰组件和固定基座;
所述第二转接座与所述球铰组件的一端连接,所述球铰组件的另一端与所述固定基座连接,所述第二转接座与所述手掌单元连接,所述固定基座与所述佩戴单元连接;
所述仿生手装置还包括电源单元,所述电源单元设置在所述佩戴单元内部;
所述佩戴单元包括固定本体和佩戴检测机构,所述固定本体的一端与所述转接单元连接,所述固定本体远离所述转接单元的一端设有用于与待安装结构连接的安装腔,沿朝向所述转接单元方向,所述安装腔的横截面积逐渐增大;所述佩戴检测机构设置在所述安装腔内,且所述佩戴检测机构与所述控制单元通讯连接。
进一步的,所述手指单元、所述拇指单元和所述手掌单元上设有可拆卸的导电保护套。
本发明提供的仿生手装置的控制方法,包括以下步骤:
控制单元接收指令信号,并根据所述指令信号向手指单元的手指驱动机构或者拇指单元的拇指驱动机构发送与所述指令信号对应的动作指令,所述手指驱动机构和所述拇指驱动机构根据所述动作指令分别驱动手指结构和拇指结构动作;
手指检测机构和拇指检测单元分别检测手指结构和拇指结构的位置信息及受力信息,将上述的位置信息和受力信息向所述控制单元传递相应的位置信号和受力信号,所述控制单元根据所述位置信号和所述受力信号确定所述手指结构和所述拇指结构的动作是否执行到位,并对所述动作指令进行修正。
本发明提供的仿生手装置,包括手指单元、拇指单元、手掌单元、控制单元、转接单元和佩戴单元;所述手指单元安装在所述手掌单元的上端,所述拇指单元安装在所述手掌单元的侧部;所述手指单元包括手指驱动机构、手指结构和手指检测机构,所述手指驱动机构用于驱动所述手指结构相对于所述手掌单元弯曲或者展开;所述手指检测机构用于检测所述手指结构的位置及压力;所述拇指单元包括拇指驱动机构、拇指结构和拇指检测机构,所述拇指驱动机构用于驱动所述拇指结构相对于所述手掌单元自身弯曲或者展开,且能够在垂直于所述手掌单元所在平面的平面内朝向所述手掌单元方向转动;所述拇指检测机构用于检测所述拇指结构的位置及压力;所述手掌单元通过所述转接单元与所述佩戴单元连接,所述佩戴单元用于与待安装结构连接;所述手指驱动机构和所述拇指驱动机构分别与所述控制单元通讯连接。
本发明中,手指单元和拇指单元分别与手掌单元连接,佩戴单元通过转接单元也与手掌单元连接,手指单元包括手指驱动机构、手指结构和手指检测机构,同时,拇指单元包括拇指驱动机构、拇指结构和拇指检测机构,且手指驱动机构、拇指驱动机构、手指检测单元和拇指检测单元分别与控制单元连接,控制单元接到动作指令信号后控制手指驱动机构和拇指驱动机构动作,并通过手指检测机构和拇指检测机构实时检测手指结构和拇指结构的位置及其受到的压力并反馈给控制单元,控制单元能够实时修正控制指令信号,本发明提供的仿生手装置,在结构简单的情况下,实现更加精准的操作控制,从而更好的接触待抓取的对象并且可适用于多种工况,在适用于精准抓住同时,能够实现了手指单元和拇指单元动作的连续反馈控制功能,控制精准度高,与操作者交互便捷,具备多种实际应用场景。
本发明提供的仿生手装置的控制方法,包括以下步骤:控制单元接收指令信号,并根据所述指令信号向手指单元的手指驱动机构或者拇指单元的拇指驱动机构发送与所述指令信号对应的动作指令,所述手指驱动机构和所述拇指驱动机构根据所述动作指令分别驱动手指结构和拇指结构动作;手指检测机构和拇指检测单元分别检测手指结构和拇指结构的位置信息及受力信息,将上述的位置信息和受力信息向所述控制单元传递相应的位置信号和受力信号,所述控制单元根据所述位置信号和所述受力信号确定所述手指结构和所述拇指结构的动作是否执行到位,并对所述动作指令进行修正。
本发明提供的仿生手装置的控制方法,当控制单元接收到指令信号时,控制单元向手指驱动机构和拇指驱动机构发送控制指令控制手指结构和拇指结构执行相应的动作,同时控制单元还能够实时接收手指检测机构和拇指检测机构对应检测的手指结构和拇指结构的位置信号和压力信号,从而判定手指结构和拇指结构是否运动到位,并对执行的动作指令进行修正,提高手指单元和拇指单元的运动精度,从而实现更加精准的仿生手装置的操作控制,实现多种工况下更好的接触和抓取,同时,能够实现了手指单元和拇指单元动作的连续反馈控制功能,控制精准度高。
基于上述特征,本发明提供的仿生手装置和仿生手装置的控制方法可以实现多种实际应用动作,例如,抓取棒状物体、夹取方块物体、OK动作、夹取片状零件、敲击键盘、抓取球形物体等,提高仿生手装置的灵活度和精准性。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
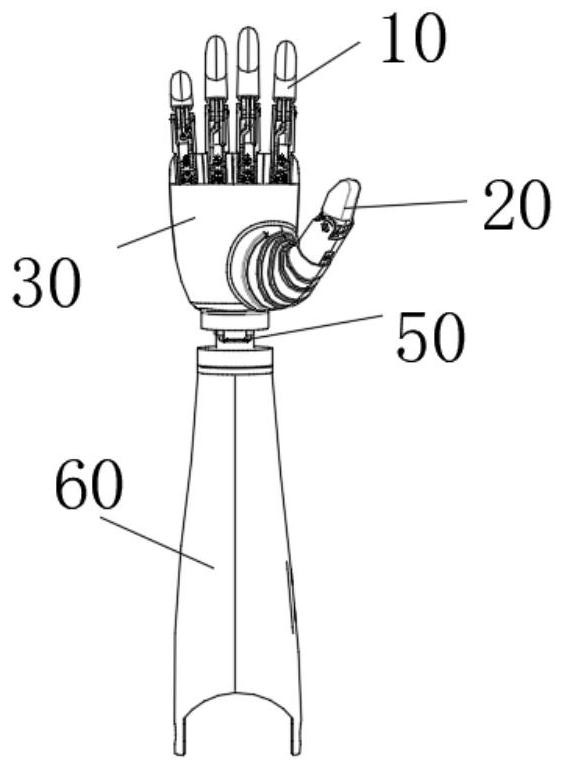
图1为本发明实施例提供的仿生手装置的结构图;
图2为本发明实施例提供的仿生手装置的局部结构图;
图3为本发明实施例提供的仿生手装置的手指单元之间的夹角的示意图;
图4为本发明实施例提供的仿生手装置的手指单元之间的夹角的另一方向的示意图;
图5为本发明实施例提供的仿生手装置的手指单元的侧视图;
图6为本发明实施例提供的仿生手装置的手指单元的结构图;
图7为本发明实施例提供的仿生手装置的手指单元的剖视图;
图8为本发明实施例提供的仿生手装置的手指单元的局部结构图;
图9为本发明实施例提供的仿生手装置的手指单元的第一手指检测机构的安装示意;
图10为本发明实施例提供的仿生手装置的第二指节的结构图;
图11为本发明实施例提供的仿生手装置的手指蜗轮的结构图;
图12为本发明实施例提供的仿生手装置的拇指单元的结构图;
图13为本发明实施例提供的仿生手装置的拇指单元的剖视图;
图14为本发明实施例提供的仿生手装置的拇指单元的局部结构图;
图15为本发明实施例提供的仿生手装置的拇指单元的局部示意图;
图16为图15中的A部放大图;
图17为本发明实施例提供的仿生手装置的转接单元和佩戴单元的剖视图;
图18为图17中的B部放大图;
图19为本发明实施例提供的仿生手装置的转接单元的结构图;
图20为本发明实施例提供的仿生手装置的转接单元的拆解图;
图21为本发明实施例提供的仿生手装置的转接单元的另一种形式的结构图;
图22为本发明实施例提供的仿生手装置平推物体的示意图;
图23为本发明实施例提供的仿生手装置抓取棒状物体的示意图;
图24为本发明实施例提供的仿生手装置夹取片状物体的示意图;
图25为本发明实施例提供的仿生手装置夹取香烟的示意图;
图26为本发明实施例提供的仿生手装置操作键盘的示意图;
图27为本发明实施例提供的仿生手装置抓取球状物体的示意图。
图标:10-手指单元;20-拇指单元;30-手掌单元;40-控制单元;50-转接单元;60-佩戴单元;70-电源单元;
101-第一手指转轴;102-第二手指转轴;103-第三手指转轴;104-第四手指转轴;105-第五手指转轴;110-第一指节;120-第二指节;121-第一弧形槽;130-手指连杆;141-手指蜗轮;142-手指蜗杆;150-手指基座;160-手指驱动电机;171-第一手指检测机构;172-第二手指检测机构;181-复位弹簧一;182-复位弹簧二。
210-拇指基座;201-第一拇指销轴;202-第二拇指销轴;203-第三拇指销轴;204-第四拇指销轴;205-第五拇指销轴;220-指节二;221-第二弧形槽;230-指节一;240-拇指连杆;250-拇指蜗轮;260-拇指蜗杆;270-第一驱动组件;280-第二驱动组件;281-齿轮二;282-齿轮一;291-位置传感器;292-感应传感器;293-第一复位弹簧;294-第二复位弹簧;295-第三复位弹簧。
511-第一转接座;512-第一转动耳座;521-第二转动耳座;522-第一旋转盘;530-第二旋转盘;541-第一销轴;542-第二销轴;551-第一缓冲结构;552-第二缓冲结构;560-第二转接座;571-球头件;572-球头座;580-调节转轴;590-固定基座;610-固定本体;620-佩戴检测机构;630-电源接口座;640-控制开关;650-连接部。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1至图21所示,本发明提供的仿生手装置,包括手指单元10、拇指单元20、手掌单元30、控制单元40、转接单元50、佩戴单元60和电源单元70;手指单元10安装在手掌单元30的上端,拇指单元20安装在手掌单元30的侧部;手指单元10包括手指驱动机构、手指结构和手指检测机构,手指驱动机构用于驱动手指结构相对于手掌单元30弯曲或者展开;手指检测机构用于检测手指结构的位置及压力;拇指单元20包括拇指驱动机构、拇指结构和拇指检测机构,拇指驱动机构用于驱动拇指结构相对于手掌单元30自身弯曲或者展开,且能够在垂直于手掌单元30所在平面的平面内朝向手掌单元30方向转动;拇指检测机构用于检测拇指结构的位置及压力;手掌单元30通过转接单元50与佩戴单元60连接,电源单元70设置在佩戴单元60内部,需要说明的是,电源单元也可以是外部电源,仿生手装置上设置有电源接口,用于与外部电源单元连接从而为系统提供电力。佩戴单元60用于与待安装结构连接;手指驱动机构、拇指驱动机构和电源单元70分别与控制单元40通讯连接。
本实施例提供的仿生手装置,具体包括手指单元10、拇指单元20、手掌单元30、控制单元40、转接单元50、佩戴单元60和电源单元70;其中,手掌单元30为仿生手装置的基座,其余功能单元基于此单元安装。电源单元70可以布置在手掌单元30的内部,也可通过电源接口布置在仿生手装置的外部,通过电源线和电源接口与仿生手装置连接,为其提供电源动力。手指单元10安装在手掌单元30的顶部,其中,手指单元10包括手指驱动机构和手指结构,手指驱动机构与电源单元70和控制单元40连接,可独立提供手指结构的闭合和张开运动。控制单元40与手指单元10、拇指单元20、电源单元70通过数据线相连,以实现对上述各单元中数据的收集和控制指令的下达;手指单元10为可独立拆卸和工作的动作模块,可以自由安装在手掌单元30的对应接口中,由电源单元70提供能力供给;连接控制单元40进行信息传递,拇指单元20安装在手掌单元30的侧部,其中,拇指单元20包括拇指驱动机构和拇指结构,拇指驱动机构与电源单元70和控制单元40连接,提供纵向方向拇指的闭合和张开运动。转接单元50安装在手掌单元30的底部,提供手掌单元30与佩戴单元60之间的多自由度转动或者弯曲,通过不同手指单元10和拇指单元20的组合动作,可实现对物体接触抓取的功能。
本发明主要应用于假肢技术领域,特别涉及电动假肢技术领域,还可以应用于机器人领域,特别是医用康复义肢领域。
本实施例中,手指单元10和拇指单元20分别与手掌单元30连接,佩戴单元60通过转接单元50也与手掌单元30连接,手指单元10包括手指驱动机构、手指结构和手指检测机构,同时,拇指单元20包括拇指驱动机构、拇指结构和拇指检测机构,且手指驱动机构、拇指驱动机构、手指检测单元和拇指检测单元分别与控制单元40连接,电源单元70为控制单元40提供电力,控制单元40接到动作指令信号后控制手指驱动机构和拇指驱动机构动作,并通过手指检测机构和拇指检测机构实时检测手指结构和拇指结构的位置及其受到的压力并反馈给控制单元40,控制单元40能够实时修正控制指令信号,本发明提供的仿生手装置,在结构简单的情况下,实现更加精准的操作控制,从而更好的接触待抓取的对象并且可适用于多种工况,在适用于精准抓住同时,能够实现了手指单元10和拇指单元20动作的连续反馈控制功能,控制精准度高,与操作者交互便捷,具备极大实际应用场景。
优选地,手指单元10、拇指单元20和手掌单元30上设有可拆卸的导电保护套。
进一步的,手指检测机构包括第一手指检测机构171和第二手指检测机构172,第一手指检测机构171用于检测手指单元10的转动位置;第二手指检测机构172用于检测手指单元10与物体接触时的压力;拇指检测机构包括第一拇指检测机构和第二拇指检测机构,第一拇指检测机构用于检测拇指单元20的转动位置;第二拇指检测机构用于检测拇指单元20与物体接触时的压力。
第一手指检测机构171、第二手指检测机构172、第一拇指检测机构和第二拇指检测机构分别与控制单元40通讯连接。优选地,第一手指检测机构171和第一拇指检测机构为位置传感器291;第二手指检测机构172和第二拇指检测机构为压力传感器。
进一步的,手指结构包括第一指节110、第二指节120、手指传动件、手指基座150、手指蜗轮141和手指蜗杆142;第二指节120分别与第一指节110和手指基座150转动连接,手指传动件的一端与第一指节110连接,手指传动件的另一端与第二指节120连接;优选地,手指传动件可以为手指连杆130,手指连杆130的一端与第一指节110铰接,手指连杆130的另一端与第二指节120铰接。手指蜗轮141与手指基座150转动连接,且手指蜗轮141与第二指节120连接,手指蜗杆142与手指蜗轮141啮合,以使手指蜗杆142能够带动第二指节120和第一指节110转动;手指蜗杆142的延伸方向与第二指节120处于展开状态时的延伸方向不共线,且手指蜗杆142远离手指蜗轮141的一端向第二指节120的弯曲方向倾斜。
进一步的,手指蜗轮141与第二指节120的相接处设有第一传动结构;第一传动结构包括手指转轴以及设置在第二指节120上的第一弧形槽121,手指转轴与手指蜗轮141固定连接,手指转轴滑动连接在第一弧形槽121内,手指蜗轮141带动手指转轴在第一弧形槽121内的滑动,从而推动第二指节120相对于手指基座150转动。
进一步的,第一手指检测机构171设置在第二指节120与手指基座150的相接处或者设置在第二指节120与第一指节110的相接处;第二手指检测机构172设置在第一指节110上。
如图5至图11中所示,本实施例中,第二指节120展开时的延伸方向沿直线A所示,手指蜗杆142的延伸方向沿直线B所示,从图中可以看出,手指蜗轮141处于手指结构与手掌单元30的相接处,相当于手指的关节处,因手指蜗杆142远离手指蜗轮141的一端向第二指节120的弯曲方向倾斜,故设置手掌单元30时,手掌单元30的厚度能够相对较薄一些,且手指与手掌单元30能够处于几乎一个平面内,从而完与手指与手掌单元30一起的平推动作。
与现有技术相比,本实施例提供的手指单元10中,手指蜗杆142的延伸方向与第二指节120处于展开状态时的延伸方向不共线,且手指蜗杆142远离手指蜗轮141的一端向第二指节120的弯曲方向倾斜,且手指蜗杆142布置在手指蜗轮141的外侧,可以降低与手掌单元30相接处的厚度,能在一定程度上减小手掌单元30的厚度,并且可以使手指伸张近似平直,从而能够完成平推物体的动作。
优选地,手指驱动机构包括手指驱动电机160,手指驱动电机160的输出轴与手指蜗杆142连接,且手指驱动电机160与手指蜗杆142同轴设置。本实施例中,手指驱动电机160与手指蜗杆142同轴,这样的传动机构尺寸更小。从而可以让手指结构做得更小,且手指驱动电机160随手指蜗杆142同方向倾斜放置,手指侧边区域为三角形布置,尺寸小且更贴近人体手形。
具体地,本实施例中,手指单元10具体包括第一指节110、第二指节120、手指连杆130、手指基座150、手指蜗轮141、手指蜗杆142、手指驱动电机160、第一手指转轴101、第二手指转轴102、第三手指转轴103、第四手指转轴104和第五手指转轴105。第二指节120下端通过第一手指转轴101与手指基座150转动连接,通过第一手指转轴101与手指基座150保持转动;手指蜗轮141与第二指节120基于第一手指转轴101同轴且相对固定。
第二指节120的上端通过第二手指转轴102与第一指节110铰接,且连接杆的下端通过第三手指转轴103与第二指节120铰接,手指连杆130的上端通过第四转动与第一指节110铰接,当第二指节120相对于手指基座150转动时,能够通过手指连杆130带动第一指节110转动。
第二指节120上设置有第一弧形槽121,第五手指转轴105连接在手指蜗轮141上,且能够随手指蜗轮141一起转动,第五手指转轴105滑动连接在该第一弧形槽121内,通过第五手指转轴105可将手指蜗杆142转动转换为第二指节120的转动,同时,在手指运动方向提供一定缓冲作用。
手指基座150与手指驱动电机160相对固定,形成一个基础机械基座。该基础机械基座为一个标准化机械接口,可以与手掌单元30实现标准化连接,对于需要多个手指结构的仿生手整体结构来说,任意手指基座150都可以配合安装,提高手指单元10的通用性。
手指驱动电机160的固定端与手指基座150固定,手指驱动电机160的输出轴与手指蜗杆142同轴连接,手指驱动电机160的输出轴的转动传递至手指蜗杆142的转动。手指蜗杆142与手指蜗轮141啮合,手指蜗杆142的旋转运动可以传递给手指蜗轮141绕其中心轴(即第一手指转轴101)转动,从而实现第一指节110和第二指节120的转动。
手指驱动机构还可以为提供旋转动力的其他动力元件,包含但不限于直流减速电机、微型伺服电机、舵机、直流无刷电机、小型液压马达、小型气动马达。上述动力元件等均可提供旋转动力,兼顾性能体积和价格成本,本实施例中,优选使用直流减速电机。
需要说明的是,作为本实施例的另一种结构形式,手指传动件还可以包括拉绳,手指蜗轮141上设有卷绕部;拉绳的一端与第一指节110连接,拉绳的另一端绕设在卷绕部上。当手指蜗轮141转动时卷绕部也同步转动,将拦绳缠绕在该卷绕部上,从而也能够拉动第一指节110向手掌单元30方向转动。
需要说明的是,手指蜗轮141的尺寸相对较小,且其使用行程大于等于85°,当手指的根部尺寸更小时,才能让手指结构尺寸更小。
如图11所示,手指蜗轮的结构图中,蜗轮中心孔用于安装第一手指转轴101,另一个通孔用于安装第五手指转轴105,且蜗轮中心孔与通孔之间的距离D与蜗轮节圆半径R的比值为0.6-1.1,优选地,蜗轮中心孔与通孔之间的距离D与蜗轮节圆半径R的比值为0.8-0.95。本实施例中,手指蜗轮141的齿顶外径为12mm,齿底外径为10.5mm,通孔的直径为2mm,蜗轮中心孔的直径为4mm,蜗轮中心孔与通孔之间的距离D为3.3-6.05mm,优选为4.5-5.5mm。优选地,为了保证通第五手指转轴105和手指蜗轮141之间连接固定的强度,在安装第五手指转轴105的通孔的远离蜗轮中心孔的区域需要加厚以避免手指蜗轮损坏。
因为手指单元10相对于手掌单元30伸展时候在同一平面,能够完成平推动作;所以让手指蜗杆142在手指蜗轮141的后侧,可以降低手指关节处的厚度。其指节根部第一手指转轴101横截面直径小于16mm。使得整个手指结构的体积、尺寸更小巧,可以组合成更为小巧的仿生机械手。优选地,第一手指转轴101的横截面直径尺寸可小于10mm。
进一步的,手指单元10还包括第一手指检测机构171,第一手指检测机构171设置在第二指节120与手指基座150的相接处或者第一手指检测机构171设置在第二指节120与第一指节110的相接处,第一手指检测机构171用于检测手指单元10的位置。
优选地,手指单元10还包括第一手指转轴101,手指蜗杆142和第二指节120均通过第一手指转轴101与手指基座150铰接。
第一手指检测机构171与第一手指转轴101同轴,且第一手指检测机构171嵌入安装在第二指节120内。
具体地,第一手指检测机构171为可提供旋转角度信息的电子传感器,包含但不限于扁平旋转电位器、圆轴电位器或者微型电子编码器。
本实施例中,第一手指检测机构171为旋转电位器。具体地,旋转电位器安装于手指基座150上,与第二指节120通过第一手指转轴101连接;旋转电位器的作用是监测第二指节120与手指基座150的相对转动角度,并可将位置信息实时传递给相应的控制机构。需要说明的是,第一手指检测机构171设置在第二指节120与第一指节110的相接处的第二手指转轴102上,同样能够起到检测手指单元10的空间转动位置的作用。
进一步的,第一指节110上设有第二手指检测机构172,第二手指检测机构172用于检测第一指节110与物体接触时的压力。优选地,第二手指检测机构172包括压力传感器。具体地,第一指节110的表面安装有压力传感器,可以提供指尖接触物体时的压力信号,压力传感器包含但不限于薄膜压电传感器、压力应变片等。
所述第一指节与所述第二指节的铰接处设置有第一手指复位件;所述第二指节与所述手指基座的铰接处设置有第二手指复位件。本实施例中,在第一指节110和第二指节120之间的销轴上套有复位弹簧一181,并通过螺钉固定,复位弹簧一181形成上述的第一手指复位件;该复位弹簧一181主要作用有两个:一、消除手指蜗轮141与手指蜗杆142在传动时传动间隙,防止手指闭合不精确;二、与第一传动结构结合,能够起到手指的缓冲防撞效果,并提供手指伸开的张开力。另外,在第二指节120与手指基座150的铰接处设置有复位弹簧二182,该复位弹簧二182形成上述的第二手指复位件。其中,复位弹簧二182套设在第一手指转轴101上,与第一传动结构结合,用于消除第二指节120转动时的传动间隙,同时具有缓冲防撞效果。
需要说明的是,本实施例中,第一指节110上设有手指保护套。优选地,手指保护套的材质为导电材料。优选地,第一指节110的手指指尖与物体接触的手指保护套可以更换,可以选用柔性材料,金属材料,塑料。优选地,可用电容屏触摸材料,用于操作平板类电子设备。
进一步的,当手指单元10和拇指单元20相对于手掌单元30展开时,手指单元10、拇指单元20和手掌单元30处于同一平面内。
进一步的,手指单元10的数量为多个,且相邻两个手指单元10弯曲或者展开的运动轨迹平面之间具有夹角,且当相邻两个手指单元10由展开状态向弯曲状态转换时,两个手指单元的间距逐渐减小;
当手指单元10处于展开状态时,沿朝向手掌单元30方向,相邻两个手指单元10之间的距离逐渐减小,且相邻两个手指单元10的运动轨迹平面在手掌单元30所在平面内的投影的夹角为0-3°;相邻两个手指单元10的运动轨迹平面在垂直于手掌单元30所在平面内的投影的夹角为0-3°。
具体地,手指单元10的数量为四个,且四个手指单元10间隔设置,在手掌单元30和手指单元10展开状态时构成的平面内,相邻两个手指单元10之间的夹角范围为0-3°,优选地,四个手指单元10由右向左分别为食指、中指、无名指和小指,在垂直于手掌单元30所在平面内,相邻两个手指单元10之间的夹角范围在0-3°。
如图3及图4所示,当食指、中指、无名指和小指这四指完全展平时,在仿生手装置的手掌单元30的垂直方向,呈以指尖指向手腕方向为圆心的环形阵列方式排布,两两之间夹角为2.3°、2.7°、2.7°;在仿生手装置的手掌单元30的所在平面的方向,呈以手背指向手心方向为圆心的环形阵列方式排布,两两之间夹角为1.5°、2.3°和1.5°。进一步的,手指单元10和手掌单元30的相接处设置有第一连接结构,每个手指单元10均通过一个第一连接结构与手掌单元30可拆卸连接;多个第一连接结构的结构和尺寸相同。
具体地,本实施例中,手指单元10的手指结构中的手指基座150为标准件,四个手指中的手指基座150尺寸规格均相同,手掌单元30上设置有与该手指基座150对应的手指安装接口,因此,上述的手指基座150和手指安装接口形成第一连接结构,从而实现多个手指单元10的快捷拆装,方便形成标准化的接口,便于维修。
如图12至图16所示,拇指单元20包括拇指基座210、拇指蜗轮250、拇指蜗杆260、第一拇指销轴201、以及相互铰接的指节一230和指节二220;拇指驱动机构包括第一拇指驱动机构和第二拇指驱动机构;拇指蜗轮250通过第一拇指销轴201与指节二220固定连接,且指节二220远离指节一230的一端通过第一拇指销轴201与拇指基座210铰接,拇指蜗杆260和第一拇指驱动机构安装在指节二220的内部,第一拇指驱动机构的输出端与拇指蜗杆260连接,拇指蜗杆260与拇指蜗轮250啮合,且拇指蜗杆260和第一拇指驱动机构位于拇指蜗轮250远离拇指基座210的一侧;拇指基座210与手掌单元30铰接,第二拇指驱动机构的输出端与拇指基座210连接,用于驱动拇指基座210、指节一230和指节二220在垂直于手掌单元30所在的平面转动。
进一步的,拇指结构还包括拇指连杆240,拇指连杆240的一端与指节一230铰接,拇指连杆240的另一端通过缓冲结构与指节二220连接;缓冲结构包括销轴结构以及设置在指节二220上的第二弧形槽221;拇指连杆240远离指节一230的一端与销轴结构连接,销轴结构滑动连接在第二弧形槽221内。
进一步的,指节一230和指节二220的铰接处设有第一拇指复位件;和/或,第一拇指销轴201与拇指基座210铰接处设有第二拇指复位件;和/或,拇指基座210与手掌单元30的铰接处设有第三拇指复位件。
与现有技术相比,本实施例中,通过拇指蜗杆260和拇指蜗轮250的动力传动从而实现拇指单元20的弯曲,且拇指蜗杆260和第一驱动组件270安装在指节二220的内部,第一驱动组件270的输出端与拇指蜗杆260连接,拇指蜗杆260与拇指蜗轮250啮合,且拇指蜗杆260和第一驱动组件270位于拇指蜗轮250远离拇指基座210的一侧,当拇指在弯曲时,拇指蜗杆260和第一驱动组件270不会造成干涉,因此,上述的拇指单元20形式和布置方式可以降低关节处的厚度,并且可以使手指伸张近似平直,利于平推物体。
进一步的,拇指单元20还包括拇指连杆240,拇指连杆240的一端与指节一230铰接,拇指连杆240的另一端通过缓冲结构与指节二220连接。
优选地,缓冲结构包括销轴结构以及设置在指节二220上的第二弧形槽221;拇指连杆240远离指节一230的一端与销轴结构连接,销轴结构滑动连接在第二弧形槽221内。
具体地,拇指单元20还包括拇指连杆240、第三拇指销轴203和第四拇指销轴204,其中,拇指连杆240的上端通过第三拇指销轴203与指节一230铰接,拇指连杆240的下端连接有第四拇指销轴204,第四拇指销轴204形成上述的销轴结构,指节二220上设有第二弧形槽221,第四拇指销轴204滑动连接在第二弧形槽221内,可限制第四拇指销轴204在第二弧形槽221内滑动,在拇指的弯曲方向提供一定缓冲作用。
进一步的,第一拇指检测机构设置在指节二220与拇指基座210的相接处或者指节二220与指节一230的相接处,第一拇指检测机构用于检测拇指单元20的位置。第一拇指检测机构为可提供旋转角度、扭矩、加速度等信息的传感器,包含但不限于角度传感器、加速度陀螺仪、扭矩监控器等等。
优选地,第一拇指检测机构包括旋转电位器,旋转电位器设置在第一拇指销轴201上,且嵌入安装在拇指基座210的内部;或者,指节二220与指节一230通过第二拇指销轴202铰接,旋转电位器设置在第二拇指销轴202上。
本实施例中,拇指蜗杆260与第一拇指驱动机构的动力输出转轴连接,接受第一拇指驱动机构提供的动力,涡轮与拇指蜗杆260啮合,涡轮通过第一拇指销轴201与指节二220固定连接,并与拇指基座210铰接,通过拇指蜗轮250的转动带动指节二220相对于拇指基座210转动,由涡轮与拇指蜗杆260组合的减速传动结构,其体积小巧,传动动力稳定,并且有自锁功能,可以提供更大的手指闭合力矩。
第一拇指驱动机构设置在指节二220的内部并相对于指节二220固定,第一拇指驱动机构的动力输出转轴与拇指蜗杆260同轴连接,第一拇指驱动机构的动力输出转轴的转动传递至拇指蜗杆260的转动。拇指蜗杆260与拇指蜗轮250啮合,拇指蜗杆260的旋转运动,可以传递给拇指蜗轮250沿其中心轴(即第一拇指销轴201)转动。
指节二220通过第一拇指销轴201与拇指基座210连接,通过第一拇指销轴201与拇指基座210保持转动。第一拇指检测机构安装于拇指基座210上,且与指节二220通过第一拇指销轴201连接,第一拇指检测机构的作用是监测指节二220与拇指基座210的相对转动角度,并可将位置信息实时传递给控制机构,用于判定拇指结构的位置。
进一步的,指节一230的表面设置有第二拇指检测机构。具体地,指节一230的表面安装有感应传感器292或者压力传感器,可以提供手指接触物体时的压力信号,压力传感器包含但不限于薄膜压电传感器,压力应变片等。
本实施例中,指节一230和指节二220的铰接处设有第一复位弹簧293,第一复位弹簧293形成第一拇指复位件;第一拇指销轴201与拇指基座210的铰接处设有第二复位弹簧294,第二复位弹簧294形成第二拇指复位件,其中,第一复位弹簧293用于缓解指节一230和指节二220之间的冲击,同时指节一230可以借助第一复位弹簧293复位;第二复位弹簧294同样可以缓冲使用过程中指节二220与拇指基座210之间的冲击,同时还可以弥补拇指蜗轮250与拇指蜗杆260之间的传动间隙,使指节二220的运动更加平稳。
第一复位弹簧293和第二复位弹簧294的设置既可以提供指节转动方向的阻尼,又可以在撞击的时候缓冲撞击冲击。
进一步的,拇指基座210用于与手掌单元30铰接,第二拇指驱动机构的输出端与拇指基座210连接,用于驱动拇指基座210、指节一230和指节二220在垂直于手掌单元30所在的平面转动。
优选地,本实施例中,第二拇指驱动机构还包括第二驱动组件280、铰接轴、齿轮一282和齿轮二281;第二驱动组件280的输出轴与齿轮一282连接,齿轮二281通过铰接轴与拇指基座210固定连接,且用于与手掌单元30铰接,齿轮二281与齿轮一282啮合。
进一步的,拇指基座210与手掌单元30的铰接处设有第三复位弹簧295,第三复位弹簧295形成上述的第三拇指复位件。
具体地,拇指基座210通过第五拇指销轴205与手掌单元30铰接,第五拇指销轴205形成上述的铰接轴,第二驱动组件280的输出轴与齿轮一282连接,用于驱动齿轮一282转动,齿轮二281通过第五拇指销轴205与拇指基座210连接,齿轮一282与齿轮二281啮合,通过第二驱动组件280连接的齿轮一282的驱动,以使拇指基座210、齿轮二281能够以第五拇指销轴205为中心相对于手掌单元30转动。
拇指基座210与手掌单元30的铰接处设有第三复位弹簧295,优选地,第三复位弹簧295设置在第五拇指销轴205上,其作用为增加拇指基座210与手掌单元30之间转动的阻力,使预紧力度可调节。
本实施例中,第三复位弹簧295优选方式是采用碟簧,可以在转动时候提供有效阻尼力,也可在运动停止后提供锁定保持阻力。
需要说明的是,本实施例中,第一拇指驱动机构和第二拇指驱动机构均为提供旋转动力的动力元件;包含但不限于直流减速电机、微型伺服电机、舵机、直流无刷电机、小型液压马达、小型气动马达。上述动力元件等均可提供旋转动力,兼顾性能体积和价格成本,此处优选使用直流减速电机。
进一步的,指节一230的表面设有保护层。优选地,保护层为导电材质。
指节一230的指尖与物体接触,因此可以在指节一230的表面设置可拆卸的保护层,其材料可以选用柔性材料,金属材料,塑料。优选地,可用电容屏触摸材料,用于操作平板类电子设备。
需要说明的是,拇指单元20能够提供两个方向自由度变化,即自身的弯曲(指节一230和指节二220相对于拇指基座210的转动)以及相对于手掌单元30的转动,可以灵活调整拇指弯曲和转动方向,配合手指结构可以完成棒状零件的握持动作。同时,拇指单元20有不同长短比例设置,可以根据不同人的手掌比例进行调整。通过机械接口的安装,组合成模块化的仿生机械手。
如图17至图21所示,本实施例中,转接单元50包括第一转接座511、第一转动耳座512、第二转动耳座521、第一旋转盘522和第二旋转盘530;第一转接座511的一端与手掌单元30连接,第一转接座511的另一端与第一转动耳座512连接,第一转动耳座512通过第一销轴541与第二转动耳座521铰接;第二转动耳座521与第一旋转盘522固定连接,第一旋转盘522通过第二销轴542与第二旋转盘530转动连接,第二旋转盘530与佩戴单元60连接;或者,转接单元50包括第二转接座560、球铰组件和固定基座590;第二转接座560与球铰组件的一端连接,球铰组件的另一端与固定基座590连接,第二转接座560与手掌单元30连接,固定基座590与佩戴单元60连接,从而使仿生手装置的手掌单元30与佩戴单元60之间通过转接单元50实现多自由度运动,满足仿生机械手的弯曲与转动,更加灵活,更加实用。
佩戴单元60包括固定本体610和佩戴检测机构620,固定本体610的一端与转接单元50连接,固定本体610远离转接单元50的一端设有用于与待安装结构连接的安装腔,沿朝向转接单元50方向,安装腔的横截面积逐渐增大;佩戴检测机构620设置在安装腔内,且佩戴检测机构620与控制单元40通讯连接。
本实施例提供的仿生手装置的佩戴单元60,实际使用时,因用于连接手掌单元30和佩戴单元60的转接单元50具有多个自由度,从而使手掌单元30相对于佩戴单元60的运动更加灵活,可控性更好,方便调整手掌单元30的位置和姿态;同时,固定本体610远离转接单元50的一端设有用于与待安装结构连接(截肢手臂或者其他需要安装假肢的结构)的安装腔,沿朝向转接单元50方向,安装腔的横截面积逐渐增大,因此,安装腔能够方便地与截肢手臂或者其他圆柱形、圆锥形结构牢固套接,提高仿生机械手佩戴装置的通用性。
优选地,固定本体610为柱状结构,沿朝向转接单元50的方向,安装腔的横截面可以为圆形,且圆形的面积逐渐减小,以使安装腔能够方便地与圆锥形、圆柱形物物体进行套接固定。需要说明的是,安装腔的内表面需要平顺光滑,以使安装腔也可以与柔软棒状物体进行连接。
需要说明的是,与安装腔连接的物体包括但不限于人体截肢手臂,也可以为其他需要安装仿生手假肢的结构。
优选地,佩戴检测机构620包括肌肉传感器。肌肉传感器能够持续采集用户肌肉的电信号,通过判断肌肉的紧绷程度来操作仿生机械手的动作。
需要说明的是,检测组件还可以为压力传感器、旋转电位器、加速度陀螺仪或者扭矩监控器。
优选地,第一转动耳座512与第二转动耳座521的相接处设置有第一缓冲结构551。第一旋转盘522与第二旋转盘530的相接处设置有第二缓冲结构552。
本实施例中,第一缓冲结构551和/或第二缓冲结构552为碟簧。
本实施例中,在第一转动耳座512和第二转动耳座521的相接处和第一旋转盘522与第二旋转盘530的相接处均设置有碟簧,其中,碟簧可以分别套设在第一销轴541和第二销轴542上,通过调整第一销轴541与第二销轴542预紧,实现调节第一转动耳座512与第二转动耳座521以及第一旋转盘522与第二旋转盘530之间的预紧状态。
具体地,第一转接座511的上端与手掌单元30连接,且保持相对固定;第一转动耳座512与第一转接座511的下端连接,且保持相对固定。第二转动耳座521与第一转动耳座512通过第一销轴541和一碟簧连接,第一转动耳座512与第二转动耳座521可以沿第一销轴541保持相对转动。通过调整第一销轴541预紧,锁紧和松弛碟簧的状态,可以调节第一转动耳座512与第二转动耳座521之间预紧状态。
第一旋转盘522与第二旋转盘530通过第二销轴542和一碟簧连接;第二转动耳座521和第一旋转盘522可以沿第二销轴542保持相对与第二旋转盘530转动,碟簧的作用是调整第一旋转盘522和第二旋转盘530与第二销轴542连接的松紧程度。
另外,如图21所示,作为本实施例另一种结构形式,转接单元50还可以包括第二转接座560、球铰组件和固定基座590,第二转接座560与球铰组件的一端连接,球铰组件的另一端与固定基座590连接,第二转接座560用于与仿生机械手的手掌单元30连接,固定基座590与固定单元连接。
优选地,球铰组件包括球头件571和球头座572,球头件571包括相互连接的连接杆和球头,球头安装在球头座572内,球头座572连接在固定基座590上,连接杆远离球头的一端与第二转接座560连接。
需要说明的是,球头座572上还可以设置有调节转轴580,用于调整球头件571与球头座572之间的预紧程度。
进一步的,电源单元70还可以设置在佩戴单元60的内部,其中,电源单元70包括第二固定座和电源组件,第二固定座设置在安装腔内,且电源组件安装在第二固定座内部。
本实施例中,电源组件与检测组件电连接,且电源组件同时用于与机械仿生手的手掌单元30上的驱动机构和检测机构连接,提供电力保障,需要说明的是,电池组件包含但不限于锂电池,干电池,燃料电池。
固定本体610的侧壁上可以设有与电源组件连接的电源接口座630,用于为电源组件充电,同时,也可以直接给仿生手装置供电。
需要说明的是,佩戴单元60还包括控制开关640,可以用于控制仿生机械手的整体供电或者动作启动,控制开关640可以为按键、摇杆、加速度重力传感器等。
另外,固定本体610远离转接单元50的一端与设置有连接部650,用于将该固定本体610固定连接在待安装结构上,本实施例中,连接部650包括两个带通孔的且间隔设置有固定本体610下端的凸出部,可以使用固定带将该固定本体610连接在待安装的手臂或者其他物体上。
如图22至图27所示,具体地,本实施例提供的仿生手装置能够用于平推物体、棒状物体抓取、方块物体夹取、片状物体夹取、香烟或笔类件夹取、键盘操作以及抓取球状物体(例如鸡蛋)等。当手指单元闭合30度,拇指单元闭合40度且旋转80度时,能够用于棒状物体抓取动作;当手指单元闭合60度,拇指单元旋转25度且拇指闭合76度时,能够在拇指单元和手指单元之间进行片状物体夹取动作;当多个手指单元闭合60度,拇指单元不动作时,能够在相邻两个手指单元之间进行香烟或笔类件夹取动作;当四个手指单元先闭合15度,拇指单元(拇指基座)旋转25度,拇指单元再闭合50度,如果要敲击某个按键,移动手掌单元的掌心至键盘正上方30mm处,然后闭合某个按键附近的手指单元,从15度闭合至20度,能够完成键盘操作。上述的手指单元和拇指单元的闭合角度分别是指第二指节和指节二的弯曲角度。
本发明提供的仿生手装置的控制方法,可以基于上述的仿生手装置,具体包括以下步骤:控制单元40接收指令信号,并根据指令信号向手指单元10的手指驱动机构或者拇指单元20的拇指驱动机构发送与指令信号对应的动作指令,手指驱动机构和拇指驱动机构根据动作指令分别驱动手指结构和拇指结构动作;手指检测机构和拇指检测单元分别检测手指结构和拇指结构的位置信息及受力信息,将上述的位置信息和受力信息向控制单元40传递相应的位置信号和受力信号,控制单元40根据位置信号和受力信号确定手指结构和拇指结构的动作是否执行到位,并对动作指令进行修正。当控制单元40接收到指令信号时,控制单元40向手指驱动机构和拇指驱动机构发送控制指令控制手指结构和拇指结构执行相应的动作,同时控制单元40还能够实时接收手指检测机构和拇指检测机构对应检测的手指结构和拇指结构的位置信号和压力信号,从而判定手指结构和拇指结构是否运动到位,并对执行的动作指令进行修正,提高手指单元10和拇指单元20的运动精度,从而实现更加精准的仿生手装置的操作控制,实现多种工况下更好的接触和抓取,同时,能够实现了手指单元10和拇指单元20动作的连续反馈控制功能,控制精准度高。
综上,本发明提供的仿生手装置,手指单元10和拇指单元20分别与手掌单元30连接,佩戴单元60通过转接单元50也与手掌单元30连接,手指单元10包括手指驱动机构、手指结构和手指检测机构,同时,拇指单元20包括拇指驱动机构、拇指结构和拇指检测机构,且手指驱动机构、拇指驱动机构、手指检测单元和拇指检测单元分别与控制单元40连接,电源单元70为控制单元40提供电力,控制单元40接到动作指令信号后控制手指驱动机构和拇指驱动机构动作,并通过手指检测机构和拇指检测机构实时检测手指结构和拇指结构的位置及其受到的压力并反馈给控制单元40,控制单元40能够实时修正控制指令信号,本发明提供的仿生手装置,在结构简单的情况下,实现更加精准的操作控制,从而更好的接触待抓取的对象并且可适用于多种工况,在适用于精准抓住同时,能够实现了手指单元10和拇指单元20动作的连续反馈控制功能,控制精准度高,与操作者交互便捷,具备多种实际应用场景。
本发明提供的仿生手装置的控制方法,当控制单元40接收到指令信号时,控制单元40向手指驱动机构和拇指驱动机构发送控制指令控制手指结构和拇指结构执行相应的动作,同时控制单元40还能够实时接收手指检测机构和拇指检测机构对应检测的手指结构和拇指结构的位置信号和压力信号,从而判定手指结构和拇指结构是否运动到位,并对执行的动作指令进行修正,提高手指单元10和拇指单元20的运动精度,从而实现更加精准的仿生手装置的操作控制,实现多种工况下更好的接触和抓取,同时,能够实现了手指单元10和拇指单元20动作的连续反馈控制功能,控制精准度高。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种仿生机械手与仿生机械手控制方法
- 一种基于肌电手环的仿生手控制系统及控制方法