一种无人机捕获系统及方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及反制无人机和信息电子技术领域,具体涉及一种无人机捕获系统及方法。
背景技术
本发明的背景基于实际需要产生。近年来,在无人机迅速成为研究热点时,也带来一系列问题,比如无人机黑飞,严重影响区域安全。因此无人机防御正在成为各国政府和军方重点关注的新领域。反无人机系统主要包括物理打击、干扰和欺骗式诱导等三种方式。
其中物理打击和干扰方式进行反无人机,会让无人机失控,对地面人员和地面环境造成伤害。如解决采用遥控器链路干扰方式的装置只能使无人机原地降落,或者原路返航。如果原地降落,可能威胁地面人员生命或者财产安全。如果无人机原路返航,无法获取无人机或者飞手,无法查证。而无人机在飞控系统和导航系统中利用GNSS信号进行校正姿态。因此,可以通过设计伪造GNSS信号的方式诱导无人机进入不同区域来实现诱捕。不但可以对无人机进行后续操作,满足公安执勤,活动保障对无人机的管控的需求,获取关键证据,并通过无人机追根溯源,制止无人机黑飞活动的再次发生,也可以有效降低无人机坠落带来的民众影响。
目前,采用模拟GNSS信号诱捕无人机系统主要用来配合阻断遥控链路的干扰设备。无人机遥控信号被阻断后,再进行无人机诱骗。其系统操作复杂,开发成本较高。并且无法事先获知无人机的遥控频率,选择的遥控器链路干扰设备协作的有效性也存在问题。同时,当前的欺骗式诱导方法仍存在如下问题:1.采用导航诱骗设备做驱离,因为无法预知无人机入侵的方向,所以有可能驱离方向不对,使无人机往内飞。需要有人值守,观察无人机飞行的方向,再根据无人机飞行的方向驱离,或者使用雷达等侦测设备,与导航诱骗设备联动驱离,设备成本高;2.采用导航诱骗设备,发送禁飞区坐标的模拟导航卫星信号,对于具备禁飞区设置及禁飞区自动降落设置的无人机有效,不具备此功能的无人机无效。因此可以通过采用控制器根据无人机飞行的情况,随时改变模拟导航信号模拟的速度和方向,有效对抗飞手对无人机的控制。
发明内容
本发明目的在于针对现有技术的不足,提供一种无人机捕获系统及方法,通过模拟卫星导航信号反制无人机,以解决无需阻断无人机遥控器链路信号的干扰设备诱捕无人机技术问题。
为实现上述目的,本发明提供如下技术方案:一种无人机捕获系统,所述系统包括用来接收信号和发射信号的主设备和操作主设备的控制器;
所述主设备包括信号模拟设备、接收信号装置和发射信号装置;所述接收信号装置接收GNSS信号,并解算出卫星时钟、当前位置信息、卫星星历信息,并传递给信号模拟设备;所述信号模拟设备接收信号接收装置的解算信息,同步本地晶振频率和时钟,接收控制器发送的指令,模拟GNSS信号,然后通过发射信号装置发出,可以实现无人机的诱捕;
所述控制器包括发射开关、摇杆、参数设置单元和模式切换单元;发射开关用于控制主设备中发射信号装置是否发出模拟GNSS信号;摇杆用于实现控制模拟GNSS信号被卫星导航接收机解算以后定位位置,及定位位置随时间变化的速度和方向、加速度和方向;模式切换单元用于切换系统的工作模式,包括人工控制模式和无人值守模式;参数设置单元用于设置模拟GNSS信号的参数。
进一步地,所述主设备中信号模拟设备接收信号接收装置解算的卫星时钟、当前位置信息、卫星星历信息、同步本地晶振频率和时钟,并接收控制器发送的指令,通过软件定义无线电技术,模拟GNSS信号,实现GNSS信号的模拟并由发射信号装置发射;根据控制器不同的操作指令,模拟生成不同的GNSS信号;模拟的信息包括GNSS信号的发射频谱等射频参数、GNSS信号的码结构和信号结构,以及模拟GNSS信号的导航电文,模拟GNSS信号被卫星导航接收机解算以后定位位置,及定位位置随时间变化的速度和方向、加速度和方向。
进一步地,信号模拟设备包括控制单元、数据码生成单元、C/A码生成单元和欺骗通道信号采集单元;
所述控制单元根据输入的参数信息确定当前位置观测到卫星、信号幅值、载波相位、码相位以及多普勒频移等相关参数;所述输入的参数信息包括位置信息、本周初始GNSS时间、卫星个数的最大值;
所述数据码生成单元根据星历和年鉴文件生成欺骗通道所需要的GNSS导航数据码的序列;所述C/A码生成单元根据GNSS卫星编号来生成对应的信号;
所述欺骗通道信号生成单元生成的信号建模如下:
x
其中,τ
C/A码函数C
数据码表示为:
其中{c
欺骗通道信号生成单元根据预先设置的接收卫星的参数,将对应欺骗通道的GNSS信号相累加,生成最终模拟的GNSS信号。
进一步地,所述模式切换单元实现被诱捕的无人机控制模式的切换,包括人工控制模式和无人值守模式,所述人工控制模式通过摇杆控制,所述无人值守模式通过参数设置单元控制。
进一步地,所述参数设置单元用于设置发送的模拟GNSS信号被卫星导航接收机解算以后的定位位置坐标随时间变化产生的轨迹的参数,包括轨迹的圆心坐标、半径、时间周期和方向(顺时针/逆时针)。
进一步地,所述信号模拟设备模拟生成GNSS信号,使得进入信号覆盖区域内的无人机卫星导航接收机解算的定位位置按控制器指令变化,无人机飞控系统控制无人机飞行姿态保持无人机原有位置,将使无人机实际飞行路径按照定位位置变化的反方向运动,从而控制无人机飞行。
进一步地,设置人工控制模式时,当无人机进入模拟GNSS信号覆盖区域并接收信号,无人机捕获系统的操作者可以观察无人机飞行的方向和速度,按照希望无人机飞行的方向操作控制器的摇杆改变模拟GNSS信号速度和方向指令;当模拟GNSS信号速度超过无人机最大速度运动,达到动力输出饱和,飞手通过遥控器对无人机进行控制无效,无法通过遥控器改变无人机的飞行方向和速度。设置无人值守模式时,根据参数设置单元设置的定位位置坐标随时间变化产生的轨迹的参数包括轨迹的圆心坐标、半径、时间周期和方向(顺时针/逆时针)产生模拟GNSS信号,使无人机产生圆周运动,无法飞入防控区域,达到无人机拒止的目的。
本发明具有以下优势:
(1)本发明通过发射低功率诱骗信号对无人机进行诱捕,具有对周边电子设备影响小、没有人体辐射,并且捕获过程可以按照捕获人员设定的速度到达指定地点,不误伤捕获人员以及不破坏环境。一般等效全向辐射功率10毫瓦的情况下,有效作用距离半径可以超过500米。
(2)本发明对无人机诱捕方式设定了多种模式:人工控制模式、无人值守模式。不同的模式可以针对捕获人员不同的需求制定。
(3)本发明通过加入实时控制器模拟GNSS信号可以对无人机进行实时控制,使无人机动力饱和的方式,有效对抗了飞手对无人机的控制。
(4)本发明提出的方法无须预知无人机入侵的方向,使从360°任意方向的无人机均在模拟卫星信号的诱骗下作圆周运动,消除了传统导航诱骗设备可能存在的驱离方向错误、需有人职守或需与雷达、摄像机等侦测设备联动的缺点,其中无人值守模式实现了全天候24小时无人值守连续防御。
附图说明
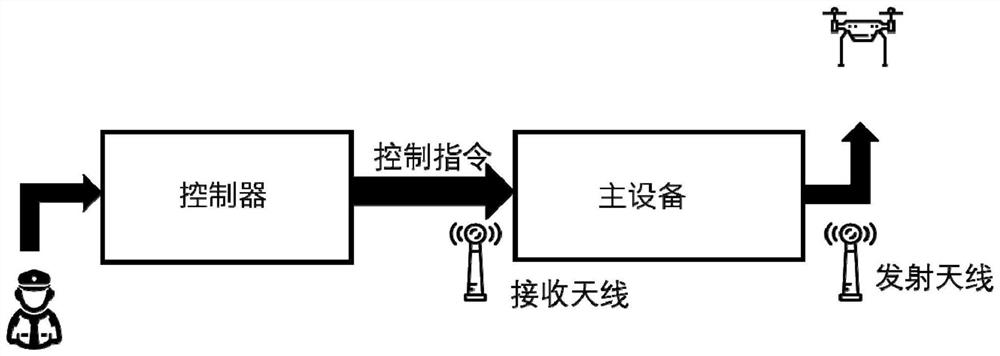
图1为本发明的反制无人机系统结构示意图;
图2为本发明的诱导无人机原理示意图;
图3为本发明的诱捕无人机功能示意图;
图4为本发明的诱导无人机做圆周运动示意图。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明:
如图1所示,一种无人机捕获系统,所述系统包括用来接收信号和发射信号的主设备和操作主设备的控制器;
所述主设备包括信号模拟设备、接收信号装置和发射信号装置;所述接收信号装置接收GNSS信号和控制器的操作指令,并传递给信号模拟设备;所述信号模拟设备接收GNSS信号,解算出星历信息,并模拟GNSS信号,实现模拟中频信号上变频到相应的导航卫星信号的射频段,然后通过发射信号装置发出,可以实现无人机的诱捕;
所述主设备中信号模拟设备通过软件定义无线电技术解算出星历信息,同步当前位置的导航卫星时钟,实现GNSS信号的模拟,根据GNSS信号以及控制器不同的操作指令,模拟生成不同的GNSS信号并由发射信号装置发射;模拟的信息包括GNSS信号的发射频谱等射频参数、GNSS信号的码结构和信号结构,以及模拟GNSS信号的导航电文;信号模拟设备解算的定位位置和位置变化的速度,方向等参数根据设定变化。
如图2所示,信号模拟设备包括控制单元、数据码生成单元、C/A码生成单元和欺骗通道信号采集单元;
所述控制单元根据输入的参数信息确定当前位置观测到卫星、信号幅值、载波相位、码相位以及多普勒频移等相关参数;所述输入的参数信息包括位置信息、本周初始GNSS时间、卫星个数的最大值;
欺骗设备生成的GNSS信号容易受到多普勒效应,相位延迟等因素的影响。为了调整多普勒频移影响的码相位和载波相位,会从星历和年鉴文件中提取出相关信息确定卫星和欺骗位置的多普勒频移。
年鉴记载了卫星随时间变化在空间中的位置,星历文件中记载了当前时间和卫星的信息,其内容按照卫星编号和卫星时钟的参考时来分类。星历文件、年鉴文件的相关文件都可以到NASA的官网上下载。
所述数据码生成单元根据星历和年鉴文件生成欺骗通道所需要的GNSS导航数据码的序列;年鉴文件每天只刷新一次,单个卫星的星历数据是可以观察到,因此数据码是可以生成的。
其中遥测字部分数据码对目标接收机和攻击者来说都是同样不可预测的,因此,攻击者可以随意生成遥测字部分数据码,要保证数据码的奇偶性。
C/A码有良好的自相关性和互相关性,是由两个十级反馈移位寄存器在通过相位选择生成。只要进行仿真的GPS卫星编号已知,C/A码发生器就可以来生成对应的信号。
所述欺骗通道信号生成单元生成的信号建模如下:
x
其中,τ
C/A码函数C
数据码表示为:
其中{c
每个欺骗通道生成的信号在整个过程会不断地被采样。第n个欺骗通道的第i个采样值的权重即为A
加载到输出循环缓冲器之前,欺骗通道的组合信号会被再重新量化,重新量化为1或2bit。
如图3所示,所述控制器用于操控被诱捕无人机的飞行轨迹,包括发射开关、摇杆、参数设置单元和模式切换单元;所述发射开关用于控制主设备中发射信号装置是否发出模拟GNSS信号;所述摇杆用于实现被诱捕的无人机的方向控制;所述参数设置单元用于设置被诱捕的无人机的运动范围和运动位置;所述模式切换单元实现被诱捕的无人机控制模式的切换,包括人工控制模式和无人值守模式,所述人工控制模式通过摇杆控制,所述无人值守模式通过参数设置单元控制。所述信号模拟设备模拟生成GNSS信号,使得进入信号覆盖区域内的无人机卫星导航接收机解算的定位位置按圆周变化,无人机飞控系统控制无人机飞行姿态保持无人机原有位置,将使无人机实际飞行路径按照导航位置变化的反方向运动,从而做圆周运动;信号覆盖范围的半径R可通过调节信号发射功率进行动态调整,信号发射功率一般小于等于10mw。
如图4所示,参数设置单元用于设置被诱捕无人机的诱骗点的坐标、无人机画圆运动的圆心坐标、半径、周期和顺时针/逆时针。其中参数设置单元控制包括拒止模式和拒止迫降模式两种,所述拒止模式为划分被诱捕无人机禁止进入的范围,所述拒止迫降模式为设置无人机强迫降落的范围。拒止模式指用户伪造地点为禁飞区的GNSS信号,使得具有禁飞区限制功能的无人机被迫降落。拒止迫降模式指用户伪造可以使得无人机最大飞行速度的GNSS信号,以预设的无人机禁飞区坐标为圆心,按照一定的半径和速度进行飞行,最后因能源耗尽降落。在本实施例中,以重点保护区域为中心,系统的发射信号装置将发射卫星导航信号模拟,覆盖区域半径为R的区域,从任意方向入侵的无人机在进入受保护区域后,无人机均将以速度v作半径为r的圆周运动。设置作用距离R为500米,圆周运动诱骗轨迹半径为50米,运动速度为40m/s,最后通过设置特定位置诱骗经纬度,使有禁飞区限制功能的无人机,因为定位位置处于禁飞区,被迫降落;对于没有禁飞区限制功能的无人机,当设置的速度超过无人机最大飞行速度时,无人机会盘旋下降,或者因能源耗尽降落。
当飞手的无人机进入防控区域,无人机捕获系统的操作者可以通过模拟GNSS信号,使得无人机具有物理最大速度;此时运动速度超过无人机最大速度运动,达到动力输出系统饱和,从而脱离原遥控器的控制,飞手通过遥控器对无人机进行控制无效,无法通过遥控器控制无人机摆脱圆周运动,无人机会自动盘旋下降,或者因能源耗尽降落,达到无人机拒止的目的。
本发明还提供了一种无人机捕获方法,具体步骤如下:
(1)主设备中信接收信号装置接收GNSS信号和控制器的操作指令,并传递给信号模拟设备;
(2)信号模拟设备根据GNSS信号以及控制器不同的操作指令,解算出星历信息,模拟生成不同的GNSS信号,然后通过控制器的发射开关控制发射信号装置是否发出模拟GNSS信号,实现无人机的诱捕;
(3)控制器操控被诱捕无人机的飞行轨迹,通过模式切换单元切换摇杆控制和参数设置单元控制,通过摇杆实现被诱捕的无人机的方向控制或者通过参数设置单元设置被诱捕的无人机的运动范围和运动位置进行控制。
本发明给出一种人工诱捕无人机具体实例,包括如下步骤:
步骤1.设备接收天线接收GNSS信号(包括但不限于GPS,GLONASS,北斗),同步当前位置的导航卫星时钟,星历等信息。
步骤2.控制器设置操控模式,打开发射开关,发射当前主设备所在位置的模拟导航信号。控制功率比真实的导航信号大10dB以上,无人机接收模拟导航信号,定位位置变成主设备所在位置。
步骤3.通过方向控制摇柄,使模拟导航信号发射的定位位置按照一定的速度和方向变化。无人机解算定位位置以后,错误的认为在按照模拟导航信号的速度和方向在运动。无人机产生速度相同,方向相反的运动。
步骤4.当运动速度按照无人机最大速度运动时,飞手不能通过遥控器对无人机进行控制。设备操作者可以控制无人机飞到预定位置。
步骤5.设备操作者通过控制器,模式切换按钮切换模式,设备发送以预设的无人机禁飞区坐标为圆心,按照一定的半径和速度的模拟导航信号。对于有禁飞区限制功能的无人机,因为定位位置处于禁飞区,被迫降落;对于没有禁飞区限制功能的无人机,当设置的速度超过无人机最大飞行速度时,无人机会盘旋下降,或者因能源耗尽降落。
上述实施例用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。
- 一种无人机自动捕获技术及自动捕获系统
- 一种无人机捕获系统及方法