一种神经内科用手臂恢复训练辅助装置
文献发布时间:2023-06-19 12:11:54
技术领域
本发明属于手臂训练装置技术领域,更具体地说,特别涉及一种神经内科用手臂恢复训练辅助装置。
背景技术
神经内科是关于神经方面的二级学科。不属于内科概念。主要收治脑血管疾病、偏头痛、脑部炎症性疾病、脊髓炎、癫痫、痴呆、代谢病和遗传倾向疾病、三叉神经痛、坐骨神经病、周围神经病及重症肌无力等。神经内科中在帮助手臂做恢复训练时,一般会用到手臂恢复训练辅助装置。
如申请号:CN201820961537.8本发明公开了一种康复科用手臂锻炼恢复装置,包括立架,所述立架的两侧固定连接有支撑块,所述支撑块的上表面固定连接有电磁铁和磁传感器,且磁传感器设置于电磁铁的两侧,所述支撑块的正面固定连接有控制器,所述立架的两侧开设有滑槽,所述立架通过滑槽滑动连接有滑块,所述滑块的侧面固定连接有铁块,所述电磁铁与铁块之间磁性连接,所述铁块的上表面固定连接有齿条板,所述立架靠近其上表面的两侧开设有第一轴孔和第二轴孔。本发明,通过上述等结构之间的配合,利用控制器来控制通过电磁铁的电流大小,从而控制电磁铁所产生的磁力的大小,进而实现对铁块吸附力的控制,起到调节锻炼难易程度的作用,满足不同使用者的锻炼需求。
目前手臂恢复训练辅助装置在使用时,虽然能够帮助患者进行手臂的康复训练,但是现有训练辅助装置上吊环训练器高度在调节时,需要先通过手动分别将两个手拧螺栓进行松动,然后再将支架进行手动升降操作,而这对于手臂灵活性较差的患者来说调节起来十分困难,并且现有训练辅助装置在使用时,通常只是放置到地板上使用,其底部由于缺乏有效固定结构,进而降低了训练辅助装置使用时稳固性。
于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种神经内科用手臂恢复训练辅助装置,以期达到更具有更加实用价值性的目的。
发明内容
为了解决上述技术问题,本发明提供一种神经内科用手臂恢复训练辅助装置,以解决现有训练辅助装置上吊环训练器高度在调节时,需要先通过手动分别将两个手拧螺栓进行松动,然后再将支架进行手动升降操作,而这对于手臂灵活性较差的患者来说调节起来十分困难,并且现有训练辅助装置在使用时,通常只是放置到地板上使用,其底部由于缺乏有效固定结构,进而降低了训练辅助装置使用时稳固性的问题。
本发明一种神经内科用手臂恢复训练辅助装置的目的与功效,由以下具体技术手段所达成:
一种神经内科用手臂恢复训练辅助装置,包括固定支座;所述固定支座为匚字形板状结构,且固定支座上端面呈左右对称状安装有两个扶杆架,两个扶杆架后端面固定有竖向支板,且竖向支板前端面上部开设有条形通口,条形通口内滑动有升降机构,且升降机构前侧底部连接有吊环训练器;所述固定支座底部设有固定机构,且固定机构左侧上部设有负压调节件,固定支座后侧通过支板设有驱动机构,且驱动机构左右两侧均设有一个踩踏件。
进一步的,所述固定机构包括吸盘、连通管和负压调节管,所述吸盘的数量为四个,且四个吸盘分别固定在固定支座外侧四个夹角处,四个吸盘之间通过三根连通管相连通,且左侧一根连通管上连接有负压调节管;所述负压调节管为漏斗状结构,且负压调节管上设有负压调节件。
进一步的,所述升降机构包括升降杆和第一滑筒,所述升降杆左右两侧均设有一个第一滑筒,且每个第一滑筒内均滑动有固定在竖向支板前端面的一根第一滑杆,升降杆后侧宽度与竖向支板上条形通口宽度相等;所述升降杆后端设有螺纹筒,且升降杆后端通过螺纹筒与驱动机构上端相连接,升降杆前端底部安装有滑轮,且滑轮外部通过滑绳滑动有吊环训练器。
进一步的,所述驱动机构包括驱动轴、传动轴、驱动盘和棘爪支板,所述驱动轴通过转轴支座转动连接在固定支座后侧支板上端面,且驱动轴上端外周面设有与升降杆后端螺纹筒相连接的螺纹,驱动轴下端外部设有第一锥齿轮;所述传动轴的数量为两根,且两根传动轴均通过转轴支座转动在固定支座后侧支板上端面,且两根传动轴相对端均设有第二锥齿轮,两根传动轴相背端均设有一个驱动盘,且两个驱动盘相背面均开设有棘轮形凹槽,两个驱动盘上棘轮形凹槽内均通过转轴转动连接有一个棘爪支板,且每个棘爪支板上均转动连接有两个棘爪,且每个棘爪与棘爪支板之间均设有弹簧,两个棘爪支板相背面均设有齿轮,两个驱动盘的转向均为逆时针转向。
进一步的,所述负压调节件包括支撑板、带动板、调节螺杆和活塞杆,所述支撑板为匚字形板状结构,且支撑板固定在负压调节管上端,支撑板内侧设有四根竖向导杆,且四根竖向导杆外部滑动连接有带动板;所述带动板上端面中部转动连接有贯穿支撑板顶部的调节螺杆,且调节螺杆外部通过螺纹连接有固定在支撑板顶端面的螺母,带动板底端面设有活塞杆,且活塞杆下端设有位于负压调节管内部的活塞,并且活塞与负压调节管内壁紧密接触。
进一步的,当所述踩踏杆处于踩踏状态时,带动块前端面齿条与棘爪支板上齿轮相啮合。
进一步的,所述踩踏件包括带动块、第二滑筒、踩踏杆和第三滑筒,所述带动块左右两端面均设有两个第二滑筒,且每个第二滑筒内均滑动连接有固定在固定支座后侧支板上端面的一根第二滑杆,并且每根第二滑杆外部均套接有弹簧;所述带动块外侧面固定有踩踏杆,且踩踏杆外侧面前端设有第三滑筒,第三滑筒内滑动连接有固定在固定支座上端面的第三滑杆,带动块前端面设有位于棘爪支板齿轮上方的齿条。
进一步的,当固定机构与底部上端面处于固定状态时,四个吸盘均吸附在地板上端面。
与现有技术相比,本发明具有如下有益效果:
1、通过固定机构的设置,当本训练辅助装置需要在地板上固定时,通过用力将固定支座向下施力,使四个吸盘吸附至地板上,当吸盘吸附力度较低时,可通过负压调节件进行调节,且通过吸附至地板上的四个吸盘,从而使本训练辅助装置底部得到有效固定作用,进而提高了本训练辅助装置使用时稳固性;训练时,通过拉动吊环训练器两端拉手进行训练即可。
2、通过踩踏件与驱动机构的配合,当需要调节吊环训练器高度时,通过脚部分别踩踏两个踩踏杆,从而使驱动轴实现正反转,从而使吊环训练器高度得到快速调节,且整个调节过程中,由于无需手动操作,从而对于手臂灵活性较差的患者来说调节起来更加容易,进而大大提高了本训练辅助装置使用时实用性。
附图说明
图1是本发明的第一视角结构示意图。
图2是本发明的第二视角结构示意图。
图3是本发明的升降机构和吊环训练器结构示意图。
图4是本发明的固定机构和负压调节件拆分后结构示意图。
图5是本发明的驱动机构和踩踏件结构示意图。
图6是本发明的驱动盘和棘爪支板拆分后结构示意图。
图中,部件名称与附图编号的对应关系为:
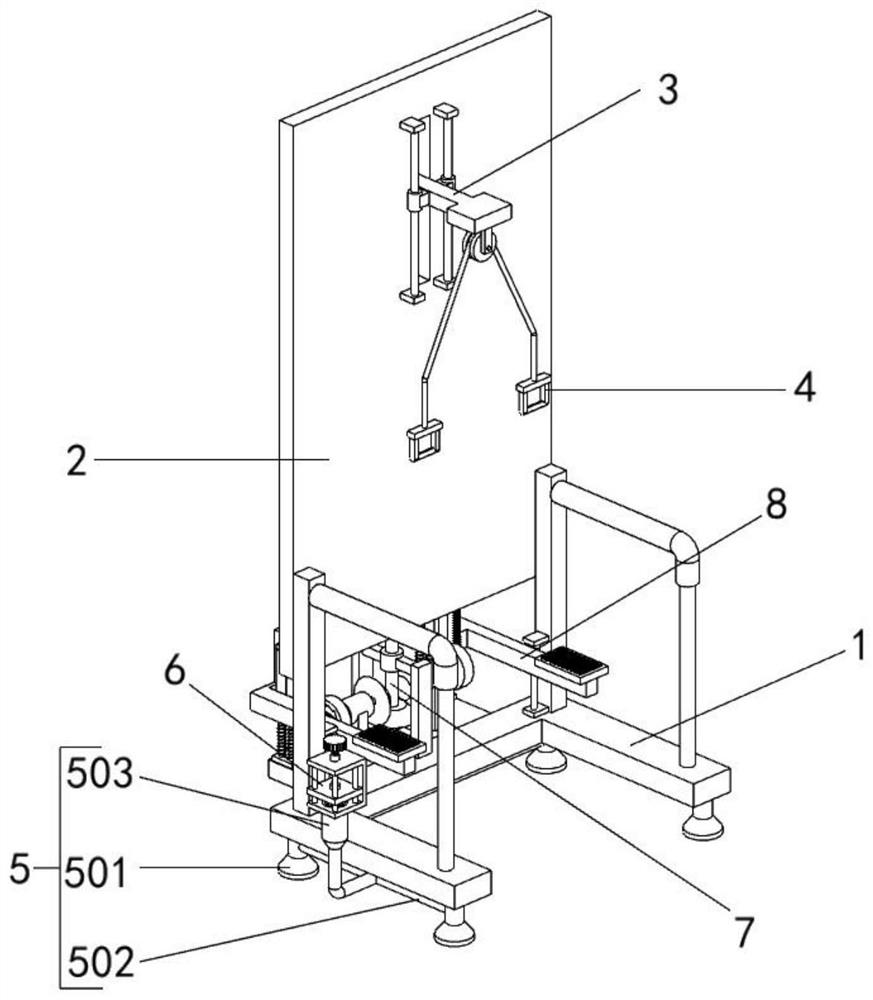
1、固定支座;2、竖向支板;3、升降机构;301、升降杆;302、第一滑筒;4、吊环训练器;5、固定机构;501、吸盘;502、连通管;503、负压调节管;6、负压调节件;601、支撑板;602、带动板;603、调节螺杆;604、活塞杆;7、驱动机构;701、驱动轴;702、传动轴;703、驱动盘;704、棘爪支板;8、踩踏件;801、带动块;802、第二滑筒;803、踩踏杆;804、第三滑筒。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图6所示:
本发明提供一种神经内科用手臂恢复训练辅助装置,包括固定支座1;固定支座1为匚字形板状结构,且固定支座1上端面呈左右对称状安装有两个扶杆架,两个扶杆架后端面固定有竖向支板2,且竖向支板2前端面上部开设有条形通口,条形通口内滑动有升降机构3;升降机构3包括升降杆301和第一滑筒302,升降杆301左右两侧均设有一个第一滑筒302,且每个第一滑筒302内均滑动有固定在竖向支板2前端面的一根第一滑杆,升降杆301后侧宽度与竖向支板2上条形通口宽度相等;升降杆301后端设有螺纹筒,且升降杆301后端通过螺纹筒与驱动机构7上端相连接,升降杆301前端底部安装有滑轮,且滑轮外部通过滑绳滑动有吊环训练器4,通过升降机构3便于吊环训练器4高度的调节;升降机构3前侧底部连接有吊环训练器4;固定支座1底部设有固定机构5;固定机构5包括吸盘501、连通管502和负压调节管503,吸盘501的数量为四个,且四个吸盘501分别固定在固定支座1外侧四个夹角处,四个吸盘501之间通过三根连通管502相连通,且左侧一根连通管502上连接有负压调节管503;负压调节管503为漏斗状结构,且负压调节管503上设有负压调节件6,使吸盘501的吸附力度较低时,可通过负压调节件6进行调节;固定机构5左侧上部设有负压调节件6;负压调节件6包括支撑板601、带动板602、调节螺杆603和活塞杆604,支撑板601为匚字形板状结构,且支撑板601固定在负压调节管503上端,支撑板601内侧设有四根竖向导杆,且四根竖向导杆外部滑动连接有带动板602;带动板602上端面中部转动连接有贯穿支撑板601顶部的调节螺杆603,且调节螺杆603外部通过螺纹连接有固定在支撑板601顶端面的螺母,带动板602底端面设有活塞杆604,且活塞杆604下端设有位于负压调节管503内部的活塞,并且活塞与负压调节管503内壁紧密接触,通过活塞杆604下端活塞在负压调节管503内壁向上滑动,从而使负压调节管503内部空气被逐渐抽出;固定支座1后侧通过支板设有驱动机构7,且驱动机构7左右两侧均设有一个踩踏件8;踩踏件8包括带动块801、第二滑筒802、踩踏杆803和第三滑筒804,带动块801左右两端面均设有两个第二滑筒802,且每个第二滑筒802内均滑动连接有固定在固定支座1后侧支板上端面的一根第二滑杆,并且每根第二滑杆外部均套接有弹簧;带动块801外侧面固定有踩踏杆803,且踩踏杆803外侧面前端设有第三滑筒804,第三滑筒804内滑动连接有固定在固定支座1上端面的第三滑杆,带动块801前端面设有位于棘爪支板704齿轮上方的齿条;当踩踏杆803处于踩踏状态时,带动块801前端面齿条与棘爪支板704上齿轮相啮合,使齿条能够带动齿轮实现逆时针转动。
其中,驱动机构7包括驱动轴701、传动轴702、驱动盘703和棘爪支板704,驱动轴701通过转轴支座转动连接在固定支座1后侧支板上端面,且驱动轴701上端外周面设有与升降杆301后端螺纹筒相连接的螺纹,驱动轴701下端外部设有第一锥齿轮;传动轴702的数量为两根,且两根传动轴702均通过转轴支座转动在固定支座1后侧支板上端面,且两根传动轴702相对端均设有第二锥齿轮,两根传动轴702相背端均设有一个驱动盘703,且两个驱动盘703相背面均开设有棘轮形凹槽,两个驱动盘703上棘轮形凹槽内均通过转轴转动连接有一个棘爪支板704,且每个棘爪支板704上均转动连接有两个棘爪,且每个棘爪与棘爪支板704之间均设有弹簧,两个棘爪支板704相背面均设有齿轮,两个驱动盘703的转向均为逆时针转向,通过棘爪与棘轮形凹槽的配合,使踩踏杆803在被踩踏后向上移动时,棘爪将不会带动棘轮形凹槽进行转动,从而使传动轴702只能实现一个专转动方向。
其中,当固定机构5与底部上端面处于固定状态时,四个吸盘501均吸附在地板上端面,使固定支座1在地板上能够得到有效固定作用。
本实施例的具体使用方式与作用:
本发明中,使用时,首先将本训练辅助装置放置到地板上,然后用力将固定支座1向下施力,使四个吸盘501吸附至地板上,当吸盘501吸附力度较低时,可通过转动调节螺杆603,使调节螺杆603在螺纹作用下带动带动板602向上移动,然后通过带动板602带动活塞杆604向上移动,从而使活塞杆604下端活塞在负压调节管503内部向上滑动,从而使吸盘501内部负压得到提高,且通过吸附至地板上的四个吸盘501,从而使本训练辅助装置底部得到有效固定作用,进而提高了本训练辅助装置使用时稳固性;训练时,通过拉动吊环训练器4两端拉手进行训练即可;
当需要调节吊环训练器4高度时,首先通过踩踏左侧踩踏杆803,使左侧带动块801带动左侧齿条向下移动,当左侧齿条与左侧棘爪支板704上齿轮啮合后,带动左侧棘爪支板704上齿轮逆时针转动,从而使左侧驱动盘703通过左侧传动轴702上第二锥齿轮带动第一锥齿轮正转,从而使驱动轴701正转,然后升降杆301后端螺纹筒在螺纹作用下向下移动,从而使吊环训练器4高度得到降低,而想要提高吊环训练器4高度时,只需将右侧踩踏杆803进行踩踏即可,从而使吊环训练器4高度得到快速调节,且整个调节过程中,由于无需手动操作,从而对于手臂灵活性较差的患者来说调节起来更加容易,进而大大提高了本训练辅助装置使用时实用性。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 一种神经内科用手臂恢复训练辅助装置
- 一种医生用于恢复训练神经内科患者的辅助装置