牵引式巡检机器人的巡检系统
文献发布时间:2023-06-19 12:13:22
技术领域
本发明一种牵引式巡检机器人的巡检系统,属于煤矿安全生产巡检技术领域。
背景技术
目前采煤工作面的巡检工作依靠人工进行,而工作面环境复杂,片帮严重、空间狭小、积水情况常见,灾害事故隐患严重,一方面,由于综采面环境危险、工况恶劣,巡检人员自身的安全无法保障;另一方面,由于检查人员容易受到个人经验和情绪、主观意识的影响,受到监测手段、数据记录、数据分析方面的制约等原因,导致检查不到位,不能得到有效的数据结果,得到的数据难以形成系统性,事故隐患经常出现漏检漏报,存在很大安全隐患。
发明内容
本发明克服了现有技术存在的不足,提供了一种牵引式巡检机器人的巡检系统,解决了现有技术中人工巡检存在的安全隐患问题。
为了解决上述技术问题,本发明采用的技术方案为:牵引式巡检机器人的巡检系统,包括总轨道结构、巡检机器人本体和驱动装置,所述总轨道结构和驱动装置均设置在刮板机上,所述巡检机器人本体活动设置在总轨道结构上,且所述巡检机器人本体通过钢丝绳在驱动装置的牵引下能沿总轨道结构移动,对综采工作面进行巡检。
所述总轨道结构包括:多个轨道本体、第一弹性连接件、支撑架和限位块,所述支撑架的一侧固定设置在刮板机上,所述支撑架的另一侧设置有两块上下平行的挡板,两块所述挡板的一端固定设置在支撑架上,两块所述挡板的另一端均设置有一个轨道本体,两个所述轨道本体上下平行设置,且两块所述挡板之间在位于轨道本体一侧的端部活动设置有弧形的单向挡条,两块所述挡板之间在位于支撑架一侧的端部活动设置有腰部内凹的回转体滚轮,所述回转体滚轮、两个挡板和单向挡条配合形成的通道用于限制钢丝绳的活动空间,多个所述轨道本体依次连接,且相邻的两个所述轨道本体之间通过第一弹性连接件连接在一起,所述第一弹性连接件用于相邻的两个轨道本体能在360°范围内调整,以适应巷道结构,上下平行的两个所述轨道本体之间设置有一个或一个以上的限位块,所述限位块用于限制钢丝绳位于轨道本体的内侧。
所述限位块包括第一限位支架和第一限位器,所述第一限位支架固定设置在位于下方的轨道本体上,所述第二限位器呈倒J型,所述第一限位器固定设置在第一限位支架上端,且所述第一限位器的上方与位于其上方的轨道本体之间留有巡检机器人本体通过的空间。
所述限位块包括第二限位支架和第二限位器,所述第二限位支架固定设置在位于下方的轨道本体上,所述第二限位器呈重心下移的偏心结构,所述第二限位器的下部活动铰接在第二限位支架上端,所述第二限位器的上端紧贴位于其上方的轨道本体设置,所述第二限位器用于巡检机器人本体在压倒其通过后能自动复位。
所述巡检机器人本体包括至少一个的滑动挂载结构,相邻的所述滑动挂载结构之间通过第二弹性连接件连接在一起,所述滑动挂载结构的中部设置有截面呈E型的滑块,所述滑块的上下端内侧均设置有与轨道本体相匹配的凹槽,确保所述滑动挂载结构能在轨道本体顺畅滑动。
所述驱动装置包括安装架、绕绳轮和驱动电机,所述安装架呈U型,所述安装架的底部固定设置在刮板机上,所述绕绳轮的两端活动设置在安装架的上部,所述驱动电机的机体固定设置在安装架的一侧,所述驱动电机的动力输出端贯穿绕绳轮中部设置,且所述驱动电机的动力输出端与绕绳轮之间通过键连接进行动力传递。
所述单向挡条的上部插接在位于上方挡板下侧的卡槽内,所述单向挡条的下部抵在上方挡板的上侧面上,所述单向挡条的圆心位于靠近回转体滚轮的一侧。
所述第一弹性连接件和第二弹性连接件均为弹簧结构。
所述滑块的上下端内侧均设置有双凹槽结构,作为备用滑槽。
本发明与现有技术相比具有的有益效果是:本发明用于开发工作面钢丝牵引巡检机器人替代巡检人员,观察采煤机开采姿态、液压支架与采煤机滚筒距离等情况,有效提高煤矿综采自动化水平,提升了监测控制系统的精准性,实现少人或无人作业。
附图说明
下面结合附图对本发明做进一步的说明。
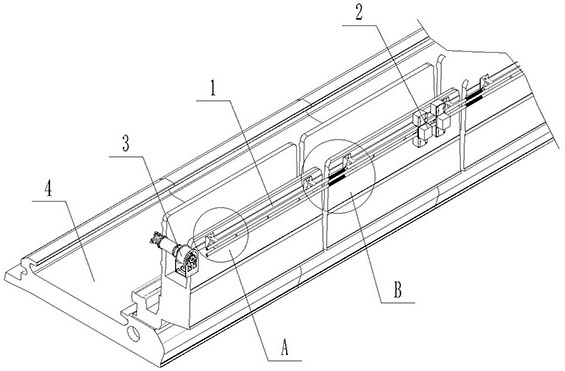
图1为本发明的结构示意图。
图2为本发明中总轨道结构的示意图。
图3为本发明中驱动装置的示意图。
图4为本发明中巡检机器人本体的示意图。
图5为图1中A的局部放大图。
图6为图1中B的局部放大图。
图7为本发明中支撑架的使用状态示意图。
图8为本发明中支撑架的使用状态侧视图。
图9为本发明中回转体滚轮、两个挡板和单向挡条的配合示意图。
图10为本发明中限位块的示意图一。
图11为本发明中限位块的示意图二。
图中:1为总轨道结构、11为轨道本体、12为第一弹性连接件、13为支撑架、14为限位块、141为第一限位支架、142为第一限位器、143为第二限位支架、144为第二限位器、15为挡板、16为单向挡条、17为回转体滚轮、2为巡检机器人本体、21为滑动挂载结构、22为第二弹性连接件、23为滑块、3为驱动装置、31为安装架、32为绕绳轮、33为驱动电机、4为刮板机。
具体实施方式
如图1~图11所示,本发明一种牵引式巡检机器人的巡检系统,包括总轨道结构1、巡检机器人本体2和驱动装置3,所述总轨道结构1和驱动装置3均设置在刮板机4上,所述巡检机器人本体2活动设置在总轨道结构1上,且所述巡检机器人本体2通过钢丝绳在驱动装置3的牵引下能沿总轨道结构1移动,对综采工作面进行巡检。
所述总轨道结构1包括:多个轨道本体11、第一弹性连接件12、支撑架13和限位块14,所述支撑架13的一侧固定设置在刮板机4上,所述支撑架13的另一侧设置有两块上下平行的挡板15,两块所述挡板15的一端固定设置在支撑架13上,两块所述挡板15的另一端均设置有一个轨道本体11,两个所述轨道本体11上下平行设置,且两块所述挡板15之间在位于轨道本体11一侧的端部活动设置有弧形的单向挡条16,两块所述挡板15之间在位于支撑架13一侧的端部活动设置有腰部内凹的回转体滚轮17,所述回转体滚轮17、两个挡板15和单向挡条16配合形成的通道用于限制钢丝绳的活动空间,多个所述轨道本体11依次连接,且相邻的两个所述轨道本体11之间通过第一弹性连接件12连接在一起,所述第一弹性连接件12用于相邻的两个轨道本体11能在360°范围内调整,以适应巷道结构,上下平行的两个所述轨道本体11之间设置有一个或一个以上的限位块14,所述限位块14用于限制钢丝绳位于轨道本体11的内侧。
所述限位块14包括第一限位支架141和第一限位器142,所述第一限位支架141固定设置在位于下方的轨道本体11上,所述第二限位器142呈倒J型,所述第一限位器142固定设置在第一限位支架141上端,且所述第一限位器142的上方与位于其上方的轨道本体11之间留有巡检机器人本体2通过的空间。
所述限位块14包括第二限位支架143和第二限位器144,所述第二限位支架143固定设置在位于下方的轨道本体11上,所述第二限位器144呈重心下移的偏心结构,所述第二限位器144的下部活动铰接在第二限位支架143上端,所述第二限位器144的上端紧贴位于其上方的轨道本体11设置,所述第二限位器144用于巡检机器人本体2在压倒其通过后能自动复位。
本发明中限位块14的两种结构方式可以以其中任意一种形式出现,也可以两种同时出现。
所述巡检机器人本体2包括至少一个的滑动挂载结构21,相邻的所述滑动挂载结构21之间通过第二弹性连接件22连接在一起,所述滑动挂载结构21的中部设置有截面呈E型的滑块23,所述滑块23的上下端内侧均设置有与轨道本体11相匹配的凹槽,确保所述滑动挂载结构21能在轨道本体11顺畅滑动。
所述驱动装置3包括安装架31、绕绳轮32和驱动电机33,所述安装架31呈U型,所述安装架31的底部固定设置在刮板机4上,所述绕绳轮32的两端活动设置在安装架31的上部,所述驱动电机33的机体固定设置在安装架31的一侧,所述驱动电机33的动力输出端贯穿绕绳轮32中部设置,且所述驱动电机33的动力输出端与绕绳轮32之间通过键连接进行动力传递。
所述单向挡条16的上部插接在位于上方挡板15下侧的卡槽内,所述单向挡条16的下部抵在上方挡板15的上侧面上,所述单向挡条16的圆心位于靠近回转体滚轮17的一侧。
所述第一弹性连接件12和第二弹性连接件22均为弹簧结构。
所述滑块23的上下端内侧均设置有双凹槽结构,作为备用滑槽。
本发明包括:总轨道结构1、巡检机器人本体2、驱动装置3等,总轨道结构1安装在刮板机上,巡检机器人本体2沿总轨道结构1由驱动装置3驱动移动,对综采工作面进行巡检。
本发明中总轨道结构1安装在刮板机4上,巡检机器人本体2沿总轨道结构1移动,对综采工作面进行巡检,替代巡检人员观察采煤机开采姿态、液压支架与采煤机滚筒距离等情况,有效提高煤矿综采自动化水平,提升了监测控制系统的精准性,实现少人或无人作业。
总轨道结构1由多个轨道本体11组成,单个轨道本体11安装在单架刮板机上,多个轨道本体11按此方法连接,单个轨道本体11之间柔性连接。
巡检机器人本体2包括一个或一个以上滑动挂载结构、多个功能模块、柔性连接部分等组成,每个滑动挂载结构挂载多个功能模块,两个滑动挂载结构之间用柔性连接部分连接,两个滑动挂载结构沿总轨道结构移动。
本发明用于开发工作面钢丝牵引巡检机器人替代巡检人员,观察采煤机开采姿态、液压支架与采煤机滚筒距离等情况,有效提高煤矿综采自动化水平,提升了监测控制系统的精准性,实现少人或无人作业。
本发明应用广泛,应用设备可以是刮板机或其它设备,以刮板机为例:第一轨道部件安装在单架刮板机上;第二轨道部件安装在刮板机上,以此类推,一一对应。第一轨道部件与第二轨道部件连接。同理,多个轨道按此方法连接。每个轨道部件包含直轨道和柔性轨道,从而保证巡检机器人本体部分在总轨道部分上的可通过性。当地面有起伏时,工作原理同上。
下面结合具体实施例,对本发明进行进一步的阐述。
本实施例中包括:总轨道部分、巡检机器人本体部分、驱动部分等。总轨道部分安装在刮板机上,巡检机器人本体部分沿总轨道部分由驱动部分驱动移动,驱动部分安装在刮板机上,完成对综采工作面进行巡检。
总轨道部分由多个轨道部件组成,单个轨道部件2安装在单架刮板机上,多个轨道部件按此方法连接,单个轨道部件之间柔性连接。
其中,总轨道部分包括:第一轨道部件安装在第一架刮板机上;第二轨道部件安装在第二架刮板机,以此类推,一一对应。第一轨道部件与第二轨道部件连接。同理,多个轨道按此方法连接。
本实施例中第一轨道部件包括:上直轨道部件、下直轨道部件、挡板部件、第一支撑部件、第二支撑部件、第一柔轨道部件、第二柔轨道部件等,上直轨道部件与第一支撑部件和第二支撑部件固连;下直轨道部件与第一支撑部件和第二支撑部件固连;挡板部件与下直轨道部件连接,挡板部件的数量根据下直轨道部件的长度而定;上直轨道部件与第一柔轨道部件连接;下直轨道部件与第二柔轨道部件连接。
本实施例中挡板部件包括:固定板、钢丝绳挡板、第一固定螺丝、第二固定螺丝等,固定板用第一固定螺丝固定在下直轨道部件上;钢丝绳挡板用第二固定螺丝固定在固定板上;钢丝绳挡板与上直轨道部件之间有距离要求。
其中,本实施例中钢丝绳挡板包括:钢丝绳挡板开孔、钢丝绳挡板内凹面、钢丝绳挡板顶面等,钢丝绳挡板开孔用于第二固定螺丝穿过,将钢丝绳挡板固定在固定板上;钢丝绳挡板内凹面的凹面方向面向钢丝绳方向,防止钢丝绳在刮板机被推移时跑出总轨道部分;钢丝绳挡板顶面设计时既要便于巡检机器人本体部分通过,又要高于钢丝绳的运行高度。
本实施例中巡检机器人本体部分包括:多个挂载部分、两个连接板、第一滑块、柔性连接部分、第二滑块、两个连接螺栓等,第一滑块与第二滑块分别通过连接板连接挂载部分,第一滑块与第二滑块用柔性连接部分连接,第一滑块与第二滑块沿总轨道部分移动。多个挂载部分为功能模块如摄像仪模块、惯性导航模块、传感器(如角位移传感器、采高传感器、瓦斯监测传感器、加速度传感器等)模块、激光扫描模块、对讲喊话模块、电池模块等;两个连接板分别连接挂载部分与第一滑块和第二滑块;柔性连接部分用两个连接螺栓分别将第一滑块和第二滑块连接在两端。
上述实施例中巡检机器人本体部分利用自动化、通信、机械等技术,在总轨道部分上自由移动,不仅可按照要求,对综采工作面进行巡检,还可利用自身体积小的优势,准确移动到现场,及时反馈现场情况。
上面结合附图对本发明的实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 牵引式巡检机器人的巡检系统
- 矿用巡检机器人的巡检系统及巡检机器人群的巡检方法