用于识别光学显微镜法的参考焦平面的印刷盖玻片和载玻片
文献发布时间:2023-06-19 12:19:35
技术领域
本公开涉及光学显微镜法,并且具体地涉及与光学显微镜法一起使用的参考焦平面。
背景技术
光学显微镜法使用可见光和透镜系统来放大图像或小物体。可使用光学显微镜来执行光学显微镜法。光学显微镜通常包括用于观看物体的目镜和/或相机。当用户通过目镜观看物体时,用户可在观看物体的不同部分时手动地改变显微镜的焦点。此外,当通过与相机通信的计算机程序来执行物体分析时,计算机程序可在观看物体的不同部分时反复地改变显微镜的焦点。然而,这种反复地改变显微镜的焦点的需要在由人类或计算机程序执行时可引起分析错误。
光学显微镜通常用于观看材料样品。样品可包括有机物诸如细菌或小生物体,并且可包括无机物诸如晶体结构或其他材料。当样品厚于光学景深时,用户或计算机程序可能需要反复地调节显微镜的焦点深度以观看样品的不同区域。在一些情况下,为了确保样品均匀分布在载玻片上,将盖玻片放在样品的顶部上,使得样品夹在载玻片与盖玻片之间。
在理想情况下,用于光学显微镜法的盖玻片和载玻片是平滑、平坦的,并且具有均匀厚度。然而,盖玻片和载玻片通常偏离该理想情况。在许多情况下,盖玻片和载玻片具有弯曲曲率或非均匀厚度。在一些实施方式中,样品由流体或延展性介质组成,该流体或延展性介质可能已通过手或其他不精确的装置来放在载玻片上。在这种实施方式中,当将盖玻片放在样品的顶部上时,夹在载玻片与盖玻片之间的样品的形状和厚度可在整个样品中发生改变或变化。该变异可由载玻片或盖玻片的曲率、倾斜、厚度变化或表面缺陷引起。该变异引起样品的不均匀分布并且因此需要在人或计算机程序观看样品的不同部分时反复地改变显微镜的焦点。
鉴于上述内容,本文公开了用于光学显微镜法的参考系的系统、方法和设备。本文所公开的参考系补偿载玻片、盖玻片和样品的变异并且因此改善显微成像。
附图说明
本公开的非限制性和非详尽实施方式将参照以下附图来描述,其中类似的附图标号指的是在各个视图中的类似部件,除非另外指明。本领域的普通技术人员将理解,各种附图仅用于说明的目的。通过参照以下详细描述、所附权利要求和若干附图,可以更清楚地理解本公开的性质以及根据本公开的其他实施方案。
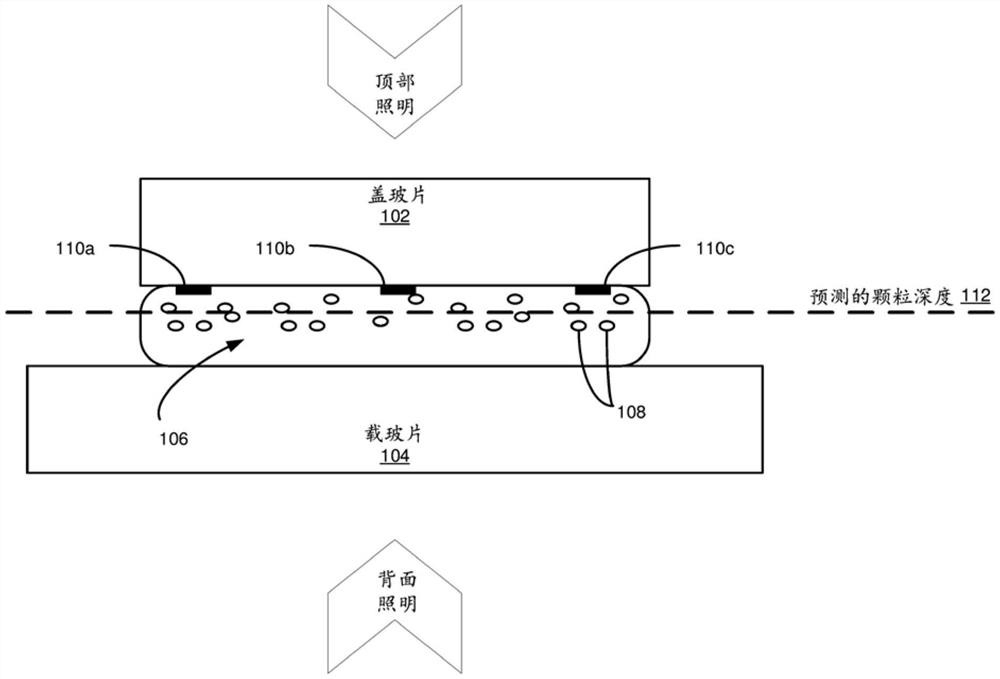
图1示出了印刷盖玻片用于在盖玻片的底表面处提供参考焦平面以使得载玻片扫描器可在盖玻片的表面下方以一个或多个指定偏移扫描样品的概念侧视图;
图2A是包括多个基准标记的印刷盖玻片的底表面的俯视图;
图2B是如穿过顶表面观看的印刷盖玻片的俯视图;
图3A是包括多个基准标记和焦点框的印刷盖玻片的底表面的俯视图;
图3B是如穿过顶表面观看的印刷盖玻片的俯视图;
图4示出了印刷载玻片用于在载玻片的顶表面处提供参考焦平面以使得载玻片扫描器可在载玻片的表面上方以一个或多个指定偏移扫描样品的概念侧视图;
图5示出了印刷盖玻片和印刷载玻片用于在盖玻片的底表面和载玻片的顶表面处提供参考焦平面以使得载玻片扫描器可在盖玻片的表面下方和/或在载玻片的表面上方以一个或多个指定偏移扫描样品的概念侧视图;
图6是印刷在盖玻片或载玻片上的基准标记的一部分的示例性20×放大倍率高分辨率图像;
图7是印刷在盖玻片或载玻片上的基准标记的一部分的示例性40×放大倍率高分辨率图像;
图8是印刷在盖玻片或载玻片上的基准标记的一部分的示例性20×放大倍率高分辨率图像;
图9是印刷在盖玻片或载玻片上的基准标记的一部分的示例性20×放大倍率高分辨率图像;
图10A是由与印刷盖玻片和/或印刷载玻片结合使用的自动化载玻片扫描器形成的示例性10×放大倍率高分辨率图像以用于将基准标记的预测的边缘与基准标记的捕获的边缘进行比较;
图10B是由与印刷盖玻片和/或印刷载玻片结合使用的自动化载玻片扫描器形成的示例性10×放大倍率高分辨率图像以用于确定当前视野完全包含在基准标记内;
图11A是样品转移工具的实施方案的透视侧视图;
图11B是样品转移工具的实施方案的直视俯视图;
图11C是样品转移工具的实施方案的直视侧视图;
图12A是样品转移工具的实施方案的透视侧视图;
图12B是样品转移工具的实施方案的直视俯视图;
图12C是样品转移工具的实施方案的直视侧视图;
图13A是样品转移工具的实施方案的透视侧视图;
图13B是样品转移工具的实施方案的直视俯视图;
图13C是样品转移工具的实施方案的直视侧视图;
图14是用于使光学显微镜聚焦于样品的方法的示意性流程图;
图15是用于使光学显微镜聚焦于样品的方法的示意性流程图;
图16是用于使光学显微镜聚焦于样品的方法的示意性流程图;
图17是用于使光学显微镜聚焦于样品的方法的示意性流程图;
图18是用于使光学显微镜聚焦于样品的方法的示意性流程图;并且
图19是用于基于多个基准标记来计算样品的参考焦平面的方法的示意性流程图。
具体实施方式
本文公开了用于确定参考焦平面以便精化用光学显微镜法观看的样品的聚焦的系统、方法和设备。本公开的一些实施方案涉及用于有效地识别待由光学显微镜法成像的样品的参考焦平面的印刷盖玻片和印刷载玻片。参考系补偿样品厚度以及载玻片和盖玻片的曲率、厚度或表面平滑度的变异。
本公开的一个实施方案使用基准标记来识别待由光学显微镜法成像的样品的参考焦平面。在一个实施方案中,将基准标记印刷在与光学显微镜一起使用的盖玻片和/或载玻片上。参考焦平面或从参考焦平面的指定偏移可用作起始点以进一步精化样品的焦面。在一个实施方案中,基于一定位置处的样品的图像来进一步精化聚焦。基于基准标记来确定图像相对于整个样品的位置。
本公开的一个实施方案在样品难以聚焦时应用于光学显微镜法。在该实施方式中,样品夹在载玻片与盖玻片之间。已印刷载玻片或盖玻片中的一者或多者以包括基准标记。用光学显微镜扫描样品。扫描并评估基准标记以限定样品的参考焦面,该参考焦面被限定为盖玻片的底表面和/或载玻片的顶表面。然后以相对于参考焦面的固定偏移扫描样品。在一些情况下,没有有意义的装置可聚焦于样品自身或确定如何从给定参考位置改善样品的聚焦。在此类情况下,该示例性实施方式特别可用于精化样品的聚焦并且加快实现充分聚焦的时间。
本公开的另外一个实施方案是用于扫描空气质量样品的印刷盖玻片。在这种实施方式中,通过捕获透明凝胶的表面上的气载微粒来收集样品。对样品进行染色并且盖上印刷盖玻片,使得捕获的微粒层非常接近盖玻片。在一些情况下,捕获的微粒层仅与液体染料层分开0-10μm的范围。在该实施方案中,盖玻片的印刷区域围绕样品,但不与样品自身重叠。系统穿过印刷盖玻片观看样品并且聚焦于印刷在盖玻片上的基准标记。在聚焦于基准标记之后,使用内推法来估计样品的聚焦位置。由于可变的染色层深度以及样品和印刷盖玻片的不完全平整度,这些估计值可能不完美。通过在估计的焦距附近的不同焦距处执行局部聚焦搜索来精化初始估计值。由此识别最佳焦点,而不会因弄混高聚焦量度的层(诸如盖玻片的顶部上或载玻片表面上的样品下方的碎屑)而变得混淆不清。该实施方式对于迅速且准确地找到空气质量样品的正确焦点特别有效,因为在采样的空气具有低微粒计数时空气质量样品可为稀疏的。
下面提供了与本公开的实施方案相符的系统和方法的详细描述。虽然描述了若干实施方案,但是应当理解,本公开不限于任何一个实施方案,而是涵盖许多替代形式、修改形式和等同物。另外,虽然在以下描述中阐述了许多具体细节以便提供对本文所公开的实施方案的透彻理解,但是可以在没有这些细节中的一些或全部细节的情况下实践一些实施方案。此外,为了清楚起见,没有详细描述相关领域中已知的某些技术材料,以避免不必要地模糊本公开。
图1是夹在载玻片104与盖玻片102之间的待用光学显微镜成像的样品106的概念侧视图。盖玻片102用作参考焦平面以便观看在整个样品106中分布的物体。在典型光学显微镜分析中,处理样品106,使得可在视觉上用光学显微镜检查该样品以识别、分析和/或定量如图1所示的感兴趣的颗粒108。盖玻片102包括提供参考焦面的标记,使得载玻片扫描器可在盖玻片102的表面下方以一个或多个指定偏移扫描样品106。
盖玻片102包括一个或多个基准标记110a、110b、110c(本文中统称为“110”)。将基准标记110印刷在盖玻片上。在一个实施方案中,仅将基准标记110印刷在相对于目镜或相机的盖玻片102的底表面上,即,印刷在与样品106接触的表面上。在一个实施方案中,将基准标记110印刷在盖玻片102的整个区域上,如图2A至图2B所示。基准标记110简化了准确且有效地使光学显微镜聚焦于样品106和/或样品106内的颗粒108的过程。基准标记110使人或计算机程序能够首先聚焦于基准标记110以识别盖玻片102的底表面的位置,从而识别样品106的顶表面的位置。
在一个实施方案中,每个基准标记110是在微距相机图像中和/或穿过光学显微镜的目镜观看时可见的合适尺寸的形状。此外,可印刷每个基准标记110,使得基准标记110在底部照明时呈现内部细粒对比度以促进基于图像的聚焦。在这种实施方案中,每个基准标记110可由具有细粒空间可变透射率的图案或纹理构成。基准标记110可具有圆点图案、散列图案、带平行线的图案、随机化图案等等。
在一个实施方案中,样品106设置在载玻片104上且盖玻片102位于该样品上。样品106由光学显微镜(或另一个设备)穿过载玻片104进行背面照明。样品106由光学显微镜(或另一个设备)穿过盖玻片102进行顶部照明。合适的扫描系统可拍摄整个盖玻片102的微距图像,从而使图案中的所有基准标记110以微距水平可视化。然后可穿过盖玻片102拍摄样品106的一部分的40×(或其他合适的放大倍率)视图。在基准标记110的一部分可见的情况下,可使该视图聚焦以查看基准标记110的图案上的过渡,如例如图2A至图2B所示的网格图案基准标记上的过渡。
在一个实施方案中,盖玻片102限定与样品106接触的盖玻片102的下表面的焦平面。这通过聚焦于基准标记110的过渡区域并且具体地聚焦于空隙至油墨区域的边缘来完成。一旦可使三个基准标记110可视化,系统就可限定与盖玻片102的下表面相对应的基部平面以用作参考焦平面。当使附加基准标记110聚焦时,可扩展用于所限定的基部平面的模型以反映盖玻片102的底表面的形状。应当理解,可使用用于确定基部平面的合适软件和数学计算并且可将它们整合为机器学习或自动化载玻片扫描系统的功能的一部分。
在一个实施方案中,使用自动化载玻片扫描器来对样品106进行可视化和评估。自动化载玻片扫描器使用沿着大体垂直的轴或z轴的运动范围来扫描样品106以沿着一个或多个所限定的焦平面(“DFP”)扫描。所限定的焦平面大体平行于与盖玻片102的下表面相对应的所限定的基部平面。如果感兴趣的颗粒108位于预测的颗粒深度112(被限定为离基部焦平面的深度)内,则可扫描预测的颗粒深度112带内的所限定的平面。在一个示例中,预测的颗粒深度112带离基部焦平面(被限定为盖玻片102的下表面)3微米至12微米深度。所述扫描可在3微米深度、5微米深度、7微米深度、9微米深度、11微米深度、13微米深度和15微米深度下以及在如根据具体情况确定的任何其他合适的范围下进行。应当理解,这些值仅仅是说明性的并且将基于对于各种应用而言的介质和感兴趣的颗粒的特性而变化。
在感兴趣的颗粒108可位于离样品106的下端更近的载玻片104附近的带中的其他实施方案中,可将基准标记110放在载玻片104的上表面上而不是放在盖玻片102的下表面上。与盖玻片102上的基准标记110一样,可通过直接印刷在载玻片104上来放置这些基准标记110。在一些实施方案中,载玻片104和盖玻片102两者上可存在不同的基准标记110。这将允许使用利用上焦平面和下焦平面两者的技术并且允许基于沉降或漂浮特性来分析感兴趣的颗粒108。
盖玻片102可为与光学显微镜载玻片一起使用的合适尺寸和形状。在一个实施方案中,盖玻片202具有约22mm×22mm的尺寸。在一个实施方案中,盖玻片102具有约20mm×40mm的尺寸。应当理解,盖玻片202可具有为特定应用(诸如为特定微距相机或光学显微镜)定制的尺寸和形状。
在一些实施方式中,以液体形式制备样品106。在一个示例中,样品是排泄物质,诸如从动物收集的粪便样品。在该示例中,通过将排泄物质与试剂混合,过滤去除大污染物并执行离心,由此制备样品106。然后可检查所制备的样品106中感兴趣的颗粒108的存在。在该示例中,动物可能疑似患有寄生生物病症,并且可检查排泄物质以识别颗粒108(诸如虫卵、寄生生物或残骸)的存在。样品处理可引起感兴趣的颗粒108(诸如寄生虫卵)因比重或类似特性而位于样品106内的特定高度处。在一些情况下,存在已知预测的颗粒深度112,感兴趣的颗粒108预期位于样品106内的该深度处。在该示例性实施方案中,虫卵可能位于样品106的上表面下方约3微米至约12微米的深度处。如果盖玻片102具有曲率或其他变异,则这可引起感兴趣的颗粒108的实际深度发生变化。在这种情况下,向预测的颗粒深度112的自动化标准聚焦将不能定位感兴趣的颗粒108。该问题通过以下方式克服:首先聚焦于基准标记110以识别盖玻片102的底表面的位置,从而识别样品106的顶表面的位置。基于基准标记110的所识别的深度,可通过聚焦到如基于基准标记110的深度确定的预测的颗粒深度112来识别颗粒108。
如本文所讨论,颗粒108包括材料的任何单元或部分诸如灰尘、细胞、细胞群、纤维、材料的部分、生物体、组织、生物物质、矿物或者可被分类或分析的任何其他物项或材料。颗粒108的分类、检测、定量或识别可包括识别特定类型的颗粒或者特定颗粒或材料的状况。例如,细胞可不仅被识别为特定细胞类型,而且被识别为具有或展示出一定状况,诸如对应于异常、疾病、感染或癌的状况。
图2A和图2B示出了盖玻片202的俯视图。图2A示出了盖玻片202的底表面204的俯视图,并且图2B示出了盖玻片202的顶表面208的俯视图。盖玻片202可由透明材料诸如玻璃或树脂玻璃构造,使得可在底表面204或顶表面208中的任一者上看到盖玻片202上的标记。底表面204是指相对于光学显微镜的相机或目镜的下表面。底表面204是与样品106接触的表面。
盖玻片202包括多个基准标记210,该多个基准标记印刷在底表面204上并且在穿过顶表面208观看盖玻片时可见。在图2A至图2B所示的实施方案中,每个基准标记210均是在顶部照明时在概览微距相机图像中可见的合适直径的圆。另外,当进行底部照明并使用目镜或相机穿过光学显微镜的物镜观看时,每个基准标记210均呈现内部细粒对比度以促进基于图像的聚焦。在一个实施方案中,每个基准标记210均由具有细粒空间可变透射率的图案和/或纹理构成。在一个说明性实施方案中,每个基准标记210均是在大约250μm至1.4mm直径的范围内的圆。应当理解,根据盖玻片202的应用,基准标记210可具有任何合适的尺寸和形状。
盖玻片202还包括印刷在底表面204上的手性指示符212。手性指示符212是手性的,使得字词或符号具有正确取向。手性指示符212的手性性质指导用户使盖玻片202以正确取向且以正确侧面面向上的方式进行取向。在图2A至图2B所示的示例中,手性指示符212是字词“CHIRAL INDICATOR”并且明显具有正确取向。将手性指示符212作为镜像印刷在盖玻片202的底表面204上,使得在穿过盖玻片202的上表面208观看时可以以正确取向观看手性指示符212。这确保实践者使盖玻片202正确地取向,使得底表面202与样品106接触。手性指示符212的手性性质进一步使审核人或计算机程序能够通过检查微距图像或高放大倍率图像来核实盖玻片具有正确取向。应当理解,手性指示符212可包括如图2A至图2B所示的文本,或其可包括符号或形状。手性指示符212可为几何形状、书写文本、一系列线、图案等等。
在一个实施方案中,基准标记210在背面照明时呈现500μm×500μm视野内的高对比度锐缘空间变异性且具有1.0μm/像素分辨率。基准标记210进一步呈现整个视野内的多个暗明过渡。为了实现这一点,空间变异可具有小于200μm的精细特征尺寸和细至1μm的直径,并优选更精细的结构或纹理。与单频或少频图案相比,多频纹理和图案可用于使散焦时的干涉伪影最小化。在一些实施方案中,这可以以多种方式实现,包括油墨中的颜料结构、印刷图像设计中的显式结构或经由精细丝网印刷的隐式结构以及着墨(under-inking)。这还可通过蚀刻、激光印刷、胶印、压印、喷墨、光刻、3D印刷或任何其他可行的标记机制来实现。沿着精细特征边缘从明到暗的过渡的一个理想距离可小于1μm。基准标记210纹理和/或结构相对于90度增量的旋转或任何旋转度可以是统计不变的。
由于每个盖玻片202预期会漂浮且印刷侧面与感兴趣的样品106的溶液接触,印刷基准标记210必须由在该环境中稳定的材料形成。下表面上的丝网印刷可为合适的。应当理解,印刷不需要精确,并且粗略特征可耐受空间变异,只要精细的细节在统计上一致即可。在实践中,稳定着色油墨可提供可接受的结果,因为其在背面照明时具有统计一致、旋转不变、高对比度的细粒结构。
在一些实施方案中,将一个或多个基准标记210和手性指示符212印刷在载玻片104上。除了盖玻片202之外,载玻片104也可包括基准标记210。在一些实施方案中,载玻片104包括基准标记210以代替印刷在盖玻片202上的任何基准标记210。这可基于待成像的样品106的类型和/或可能存在于样品106内的感兴趣的颗粒108来确定。例如,如果对于给定样品类型和制备方法而言颗粒108的预期的位置位于盖玻片附近,则印刷盖玻片最佳。另选地,如果对于给定样品类型和制备方法而言颗粒108的预期的位置位于载玻片附近,则印刷载玻片最佳。此外,这可基于是否使用穿过载玻片104的背面照明和/或穿过盖玻片102的顶部照明对样品106进行照明来确定。
在基准标记210印刷在载玻片104上的实施方案中,载玻片104的外观可类似于图2A和图2B所示的盖玻片202。一种差异是基准标记210印刷在载玻片的顶表面上,而不是印刷在盖玻片的底表面上。此外,手性指示符212印刷在载玻片的顶表面上,并且不作为镜像印刷,而是以正确、可读形式印刷。
图3A和图3B示出了与图2A和图2B所示的盖玻片202有相似性的盖玻片302的实施方案。图3A是盖玻片302的底表面304的俯视图,其中底表面304相对于显微镜的相机或目镜来限定并且旨在与样品106接触。图3B是盖玻片302的顶表面308的俯视图,其中顶表面308相对于显微镜的相机或目镜来限定并且旨在面向样品106的相反方向。盖玻片302包括多个基准标记310和手性指示符312。另外,盖玻片302包括焦点框314,该焦点框可印刷在盖玻片302上以限定样品306位于何处或应在何处观看该样品。
在图3A至图3B所示的实施方案中,存在十个印刷基准标记310。应当理解,基准标记310可为任何合适的尺寸或形状。在图3A至图3B所示的实施方案中,基准标记310各自是在顶部照明时在微距相机图像中可见的包括网格图案的合适直径的圆。另外,基准标记310在底部照明时向40×物镜呈现内部细粒对比度以促进基于图像的聚焦。
盖玻片302还包括手性指示符312。在该实施方案中,手性指示符312是印刷在底表面304上的字词“LEFT”。手性指示符312是手性的,使得手性指示符312协助用户使盖玻片302正确地取向。将字词LEFT作为镜像印刷在盖玻片302的底表面304上,使得在穿过顶表面308观看时可正确地阅读该字词,如图3B所示。字词LEFT在可正确地阅读该字词时指示已使盖玻片302正确地取向(如在图3B中,其中顶表面308面向上),并且当从上方穿过显微镜的相机或目镜观看时,字词LEFT位于盖玻片302的左侧上。
盖玻片302还包括焦点框314。根据应用,焦点框可位于盖玻片302的中心位置处或可位于盖玻片上的某个其他合适位置处。焦点框314充当用于成像目的的边界框。如所描绘的,焦点框314可形成为一系列平行线,这些平行线限定具有用于定位在样品306上方的不含线的中心空间或窗口的形状。在所描绘的实施方案中,该形状是具有与这些平行线共线的两个较长平行侧面和与之横向的两个较短侧面的矩形。除了基准标记310之外,焦点框314的线也可用于在样品306周围的焦点框310中的任何数量的位置处形成一系列焦点以便计算焦平面。应当理解,焦点框314可为任何合适的形状并且可由可能平行或可能不平行的线、圆点或其他信息形成以充当用于使样品306成像的目的的边界框。
与图3A至图3B类似的实施方案的一种潜在用途是通过以下方式制备的空气质量样品的检查:将空气流导向经过合适材料的条带,该条带将任何颗粒捕获在其中而产生样品306条带,然后可通过显微镜法检查该条带。在一个说明性实施方案中,该样品306条带可具有约1mm×约13mm的尺寸。周围焦点框314可具有约7.5mm×约19mm的尺寸且中心空间具有约5mm×约17mm的尺寸。应当理解,这些形状和尺寸仅仅是说明性的并且可在特定样品尺寸因测定法不同而变化时变化。例如,产生其他标准尺寸和形状的样品的测试可利用具有焦点框314的盖玻片,所述焦点框具有一定尺寸和形状以形成与此类样品间隔开的合适框架。
在一些实施方案中,将一个或多个基准标记310和手性指示符312印刷在载玻片104上。除了盖玻片302之外,载玻片104也可包括基准标记310。在一些实施方案中,载玻片104包括基准标记310以代替印刷在盖玻片302上的任何基准标记310。这可基于待成像的样品106的类型和/或可能存在于样品106内的感兴趣的颗粒108来确定。例如,如果对于给定样品类型和制备方法而言颗粒108的预期的位置位于盖玻片附近,则印刷盖玻片最佳。另选地,如果对于给定样品类型和制备方法而言颗粒108的预期的位置位于载玻片附近,则印刷载玻片最佳。此外,这可基于是否使用穿过载玻片104的背面照明和/或穿过盖玻片302的顶部照明对样品106进行照明来确定。
在基准标记310印刷在载玻片104上的实施方案中,载玻片104的外观可类似于图3A和图3B所示的盖玻片302。一种差异是基准标记310印刷在载玻片的顶表面上,而不是印刷在盖玻片的底表面上。此外,手性指示符312印刷在载玻片的顶表面上,并且不作为镜像印刷,而是以正确、可读形式印刷。
图4是夹在载玻片104与盖玻片102之间的待用光学显微镜成像的样品106的概念侧视图。在图4所示的实施方案中,将基准标记110印刷在载玻片104的顶表面而不是如图1所示的盖玻片102的底表面上。将载玻片104印刷成使得可至少部分地基于印刷在载玻片104上的基准标记110d、110e、110f(统称为“110”)来确定参考焦平面。载玻片104包括提供参考焦平面的基准标记110,使得载玻片扫描器可在载玻片104的表面上方以一个或多个指定偏移扫描样品106。
图5是夹在载玻片104与盖玻片102之间的待用光学显微镜成像的样品106的概念侧视图。在图5所示的实施方案中,将基准标记110印刷在盖玻片102和载玻片104而不是如图1所示的仅盖玻片102或如图4所示的仅载玻片104上。将盖玻片102和载玻片104各自印刷成使得可至少部分地基于印刷在盖玻片102和载玻片104上的基准标记110a、110b、110c、110d、110e、110f(统称为“110”)来确定参考焦平面。
相对于图1讨论的扫描技术在作一些变更的情况下也可应用于图4和图5所示的另选实施方案。当将基准标记110印刷在载玻片104的顶表面而不是盖玻片102的底表面上时,相对于载玻片104而不是盖玻片102来识别参考焦平面。换句话讲,参考焦平面识别载玻片104的顶表面并由此识别样品106的底表面。这不同于参考焦平面识别盖玻片102的底表面并由此识别样品106的顶表面,如结合图1所讨论。
即使样品自身的外观难以识别,印刷在盖玻片102或载玻片104上也允许用户或计算机程序检测样品106的位置。就印刷盖玻片102而言,将盖玻片102放在样品106上方。就印刷载玻片104而言,使样品106在载玻片104的印刷区域内进行取向。在任一种情况下,优化扫描区域以经由概览图像识别盖玻片102或载玻片104的印刷区域。基于印刷区域来对该样品类型限定适当的扫描区域。
例如,具有多个基准标记的湿排泄物盖玻片限定涵盖所有基准标记的20m×20mm边界框。然后可在扫描之前将该边界框一直放大到完全22mm×22mm盖玻片区域或缩小到更小的区域。这可基于扫描时间、扫描文件大小和测试灵敏度之间的期望的折衷来确定。进一步例如,空气质量印刷图案包括围绕样品区域的矩形框,如图3A至图3B所示。矩形框可用于限定该样品类型的扫描区域。
在一个实施方案中,方法从捕获整个印刷盖玻片102的概览图像开始。在一个另选实施方案中,压印载玻片104而不是盖玻片102,并且概览图像捕获整个印刷载玻片。在一个实施方案中,样品设置在载玻片上,并且盖玻片设置在样品上,并且概览图像捕获盖玻片、样品和载玻片中的每一者。概览图像将捕获例如图2A至图2B中的压印在盖玻片202上的十八(18)个基准标记210中的每一者。此外,概览图像将捕获例如图3A至图3B中的压印在盖玻片302上的十(10)个基准标记和焦点框中的每一者。应当理解,概览图像的内容将取决于印刷盖玻片、样品和/或印刷载玻片的实施方式。
在该实施方案中,在捕获概览图像之后,计算参考焦平面。在压印盖玻片102的实施方案中,参考焦平面限定盖玻片102的底表面。在压印载玻片104的实施方案中,参考焦平面限定载玻片104的顶表面。在任一个实施方式中,参考焦平面限定与样品106接触的盖玻片102或载玻片104的表面。样品106夹在盖玻片102与载玻片104之间。
为了促进计算参考焦平面,使光学显微镜聚焦于基准标记。基于聚焦于基准标记的结果来计算从基准标记到光学显微镜的物镜、相机、透镜、目镜或其他相关部件的焦距。焦距是从基准标记到光学显微镜的相关部件诸如物镜透镜、相机透镜、目镜透镜、图像传感器等等的距离。应当理解,焦距可基于不同实施方式来限定不同距离。在压印盖玻片102的实施方案中,至基准标记的焦距限定盖玻片102的底表面并且进一步限定样品106的顶表面。在压印载玻片104的实施方案中,至基准标记的焦距限定载玻片104的顶表面并且进一步限定样品106的底表面。
基于某个基准标记的焦距和该某个基准标记相对于概览图像的(x,y)坐标来确定每个基准标记的(x,y,z)坐标。某个基准标记的焦距提供该基准标记的z轴坐标。概览图像内的某个基准标记的位置提供该基准标记的(x,y)坐标。基于多个基准标记中的每个基准标记的(x,y,z)坐标来计算参考焦平面。
在一个实施方案中,通过内推两个或更多个基准标记之间的空间的焦距来计算参考焦平面。在一个实施方案中,通过内推两个相邻基准标记的z轴坐标来计算两个相邻基准标记之间的盖玻片102和/或载玻片104的表面曲率。
在一个实施方案中,通过外推某个基准标记的焦距以估计围绕该某个基准标记的区域的焦距,从而计算参考焦平面。在这种实施方案中,基于该某个基准标记的(x,y,z)坐标来计算围绕该某个基准标记的区域的盖玻片102和/或载玻片104的表面曲率。
在一个实施方案中,通过识别三个基准标记并且计算这三个基准标记之间的(x,y,z)距离来计算参考焦平面。在该实施方案中,将平面拟合到由这三个基准标记的(x,y,z)坐标限定的三角形。可对多组三个基准标记重复该过程以生成三角网格,该三角网格限定盖玻片102和/或载玻片104的表面曲率和尺寸。
在一个实施方案中,通过识别四个或更多个基准标记以及这四个或更多个基准标记中的每个基准标记的(x,y,z)坐标来计算参考焦平面。在该实施方案中,将盖玻片102和/或载玻片104的曲率拟合到由这四个或更多个基准标记的坐标限定的(x,y,z)点。这是为了促进计算与盖玻片102和/或载玻片104的整个表面近似的表面拓扑结构而执行的。
应当理解,可基于本文所讨论的实施方案中的一个或多个实施方案来计算参考焦平面。在一个实施方案中,基于以下方法来计算参考焦平面:内推法、外推法、将平面拟合到三角形以及进一步基于多个基准标记的坐标来估计曲率。
图6至图9是基准标记的20×至40×放大倍率高分辨率图像,诸如图2A至图2B和图3A至图3B所示的那些。
图6是基准标记110的一部分的20×放大倍率高分辨率图像。图6描绘了由图像的上边缘上的圆形轮廓602指示的基准标记110的顶侧。外部边缘602呈现用于聚焦评估的对比性区域,并且还可用于确定基准的取向和位置。基准内部的印刷区域604与外部区域606在视觉上不同,在外部区域中背景或样品是可见的。内部空隙区域608确保基准的内部区域包含不透明到透明的过渡区域610,在这些过渡区域中,可在该实施方案中利用油墨纹理所呈现的细粒对比度来确定最佳聚焦。
图7是基准标记110的一部分的40×放大倍率高分辨率图像,其提供关于过渡区域610和外部边缘602的对比性纹理的附加细节。
图8是基准标记110的一部分的20×放大倍率高分辨率图像。图8描绘了由图像的左侧上的圆形轮廓602指示的基准标记110的左侧。图8所示的图像包括纹理过渡区域610中的细粒油墨纹理的相对密集分布,这可用于聚焦优化。
图9是基准标记110的一部分的20×放大倍率高分辨率图像。图9中的细粒油墨纹理比图8中更稀疏并具有大内部空隙区域608,使得图9示出了基准标记的合适油墨分布和密度的范围的下端。由于能耐受相对较大量的变化,盖玻片102的印刷过程仍然较简单并且能降低成本。
图10A和图10B描绘了由与如本文所讨论的印刷盖玻片102结合使用的自动化载玻片扫描器形成的示例性图像。图10A是描绘基准标记110的边缘的图像,其中明部分表示盖玻片102的透光部分(没有基准标记110),并且暗部分表示基准标记110。图10B是描绘基准标记110的内部网格诸如图2A至图2B或图3A至图3B中所描绘的散列或圆点阵列的图像。
为了促进捕获图10A至图10B中所描绘的图像,自动化载玻片扫描器物镜位于基准标记110上以在聚焦于基准标记之前计算基准的(x,y)坐标。在图10A至图10B中,虚线表示基准标记110的预期的边缘1002。由诸如自动化载玻片扫描器的系统计算预期的边缘1002。可基于参考图像诸如整个印刷盖玻片或载玻片的概览图像来计算预期的边缘1002。实线表示如在图10A至图10B所示的图像中捕获的基准标记110的捕获的边缘1004。图10A至图10B中表示的图像可表示使用自动化载玻片扫描器物镜和相机捕获的缩小图像。捕获的边缘1002表示如在高放大倍率视野中捕获的基准标记110的从明到暗的实际过渡。箭头表示位置移动或矢量1006,其指示将显微镜物镜放在基准标记110的中心所需的相对位置移动。
在一个实施方案中,在捕获样品106和盖玻片102的微距图像之后,自动化载玻片扫描器或其他系统计算基准标记110的预期的边缘1002。预期的边缘1002指示印刷在盖玻片102上的至少一个基准标记110的预测的尺寸和形状。在一个实施方案中,基于基准标记110的形状在该系统中的先前输入来计算预期的边缘。在另一个实施方案中,基于微距图像中的基准标记110的形状来计算预期的边缘。微距图像中的基准标记110的位置用于预测显微镜载物台位置,该显微镜载物台位置会将基准标记110带到自动化载玻片扫描器物镜的高放大倍率视野中。该系统将显微镜载物台移动到基准标记110的预测的位置并且以搜索模式(诸如向内或向外螺旋移动)扫描样品106。当基准标记110的至少一部分在视野范围内时,该系统确定基准标记110的捕获的边缘1004。捕获的边缘1004被确定为基准标记110中从明到暗的过渡的位置。该系统将预期的边缘1002与捕获的边缘1004进行比较以确定捕获的高放大倍率图像相对于盖玻片102的微距图像的位置。在一个实施方案中,通过使预期的边缘1002与捕获的边缘1004在公认容限阈值内匹配来确定微距图像相对于盖玻片102的位置。
如图10A所示,预期的边缘1002(由虚线表示)围绕预测会发生从明到暗的过渡的基准标记110的预期的边缘弯曲。评估捕获的边缘1004(由实线表示)以跟踪实际发生从明到暗的过渡的基准标记110的边缘。
在一些情况下,用于生成所计算的焦平面的点的期望的布置是基准标记110的“内部网格”而不是基准标记110的实际边缘。基准标记110的内部网格包括基准标记110内的圆点或散列,如图2A至图2B和图3A至图3B所示。在这种情况下,该系统可利用高放大倍率图像中的暗和明的相对百分比以及微距图像相对于盖玻片102的布置来计算将显微镜物镜放在基准标记110的中心中的相对位置移动或矢量1006。该相对位置移动或矢量1006在图10A中由箭头表示。
在一些情况下,捕获的图像包括基准标记110的内部网格的描绘。这在图10B中示出。图10B中所描绘的明和暗区域表示基准标记110内的散列或圆点阵列。可能通过计算在该位置处成像所需的位置移动或矢量1006来捕获图10B所示的图像。另选地,可能通过在启动时直接使该位置成像来捕获图10B所示的图像。
在一个实施方案中,预期的边缘1002上、计算的边缘1004和位置移动或矢量1006可用于优化该系统的各种目的。例如,这些参数中的一个或多个参数可用于系统校准,用于数据保留,或用于操作员控制。更低分辨率图像的捕获和保留可允许更快的计算和数据操纵时间。这另外降低了数据存储的成本。
在一个实施方案中,由与光学显微镜相关联的相机捕获高放大倍率图像。评估高放大倍率图像以确定是否在图像中捕获基准标记。如果没有在图像中捕获基准标记,则移动光学显微镜的载物台或物镜以改变与光学显微镜相关联的相机的视野。光学显微镜的载物台或物镜可以以任何合适的方式移动,例如以从初始高放大倍率图像位置向外移动的螺旋构型移动。在移动载物台或物镜之后,捕获新的高放大倍率图像。评估新的高放大倍率图像以确定是否在图像中捕获基准标记。可重复该过程任何次数直到在高放大倍率图像中捕获基准标记。
响应于确定在高放大倍率图像中捕获基准标记,评估高放大倍率图像以确定是否在高放大倍率图像中捕获整个基准标记或基准标记的仅一部分。另选地,如果基准标记大于光学显微镜相机所捕获的高放大倍率视野,则可评估该图像以确定整个视野是否被基准标记覆盖或是否视野的仅一部分包含基准标记。响应于视野的仅一部分包含基准标记并且在该图像中捕获基准标记的仅一部分,识别基准标记的捕获的边缘1004。将基准标记的捕获的边缘1004与预期的边缘1002进行比较。可基于概览微距图像来确定预期的边缘1002,该概览微距图像捕获整个印刷盖玻片或载玻片并且包括在高放大倍率图像中捕获的基准标记。比较捕获的边缘1004和预期的边缘1002以确定预期的边缘1002是否在公认容限阈值内匹配捕获的边缘1004。
图11A至图13C示出了样品转移工具1100、1200、1300的不同实施方案的各种视图。图11A、图12A和图13A示出了样品转移工具1100、1200、1300的不同实施方案的透视图。图11B、图12B和图13B示出了样品转移工具1100、1200、1300的不同实施方案的直视俯视图。图11C、图12C和图13C示出了样品转移工具1100、1200、1300的不同实施方案的直视侧视图。
图11A至图11C示出了样品转移工具1100的实施方案,其中细长构件1102在外环1104内居中。样品转移工具1100可用于将液体样品放在载玻片104上以便对液体样品执行光学显微镜分析。样品转移工具1100特别可用于捕获存储在试管诸如圆柱形试管内的样品。在一些情况下,将样品106在试管内离心以将感兴趣的颗粒108与样品106的其他组分诸如溶剂或其他溶液分离。在一些情况下,颗粒108在离心之后位于样品106的最顶部处。在这种情况下,样品转移工具1100能特别有效地捕获位于试管内的样品106的最顶部处的颗粒108。
样品转移工具1100包括充当手柄的细长构件1102。在细长构件1102的一端处,样品转移工具1100包括外环1104,其中一个或多个轮辐1106附接到外环1104并且位于由外环1104限定的内部空间内。该一个或多个轮辐1106与外环1104的组合用于限定样品捕获环1108。样品捕获环1108限定内部空间,在该内部空间中通过表面张力来捕获样品。
样品捕获环1108由一个或多个轮辐1106与外环1104的一部分的组合限定。应当注意,这些图仅出于说明性目的指出了由样品捕获环1108限定的内部空间。每个样品捕获环1108用于通过使用表面张力来捕获或“拾取”样品108。样品可附接到限定样品捕获环1108的轮幅1106和外环1104,并且样品可在表面张力的作用下“拉伸”跨越由样品捕获环1108限定的空的内部空间。如图11A至图11C所示,样品捕获环1108可为略呈三角形的形状,或其可限定任何合适的形状,诸如圆形或椭圆形状、矩形形状、某种其他抽象形状等等。
如图所示,外环1104可为圆形,或其可为另一种合适的形状诸如正方形、矩形、卵形等等。如所描绘的,外环1104和轮幅1106可在与细长构件1102大体正交的平面内形成。外环1104和轮幅1106的尺寸被设定为在插入到液体样品中时由表面张力将液体保持在其中。在所描绘的实施方案中,外环1104内存在四个轮幅1106。应当理解,外环1104内可存在任何数量的轮幅1106。另选地,外环1104内可不存在轮幅1106,并且外环1104可直接附接到细长构件1102。
在一个示例性说明性实施方式中,样品转移工具1100用于将包含动物排泄物的液体溶液转移到载玻片104以便通过光学显微镜法进行分析。可通过以下方式制备排泄物样品:将所获得的粪便样品与合适的试剂混合,过滤该混合物,并且在合适的容器诸如试管中执行离心。在示例性实施方式中,排泄物内的感兴趣的颗粒108在离心之后位于溶液的最顶部处。因此,期望仅捕获位于试管中的样品的弯液面或最顶部,因为样品的该部分包括感兴趣的颗粒108。样品转移工具1100的尺寸可被设定为适于插入到试管中以接触样品的液体部分。然后液体在表面张力的作用下保留在样品转移工具1100的该多个样品捕获环1108中。之后可将样品转移工具1100放置成与显微镜载玻片104接触。随后可从样品捕获环1108释放接触载玻片104的液体以形成载玻片104上的液团(pool)。然后可将盖玻片102放在该液团上方以形成供分析用的布置的样品。样品转移工具1100的尺寸可被设定为适于插入到试管中并且还适于外环1102形成液团,该液团对应于盖玻片102的区域并具有适合期望的分析的厚度。
外环1104限定内部空间。在如图11A至图13C所示的外环1104为圆形或椭圆形状的实施方案中,外环1104的内部空间形成圆形或椭圆形状。外环1104可另选地为正方形形状、矩形形状、五边形形状、六边形形状、八边形形状等等。该一个或多个轮辐1106附接到外环1104并且设置在由外环1104限定的内部空间内。在一个实施方案中,该一个或多个轮辐1106垂直于细长构件1102或大约垂直于细长构件1102。继而,外环1104也垂直于细长构件1102或大约垂直于细长构件1102。
样品转移工具1100可由刚性材料诸如聚碳酸酯、金属、木材等等构造。样品转移工具1100可由半刚性材料构造。
外环1104与该一个或多个轮辐1106的组合限定一个或多个样品捕获环1108。该一个或多个样品捕获环1108中的每个样品捕获环连同该一个或多个轮辐1106一起组成由外环1104限定的内部空间的全体。样品捕获环1108被限定成经由表面张力特性来保持液体。样品捕获环1108使样品转移工具1100能够拾取液体样品并且将液体“拉伸”跨越样品捕获环1108。样品捕获环1108由外环1104的壁和一个或多个轮辐1106限定,如图11A至图11B、图12A至图12B和图13A至图13B所示。
在图11A至图11C所示的实施方案中,样品转移工具1100包括四个轮幅1106。这四个轮幅1106连同外环1104一起共同限定四个单独样品捕获环1108。应当理解,样品转移工具1100可包括任何合适数量的轮幅1104,因此可包括任何合适数量的样品捕获环1108。
在一个实施方案中,样品捕获环1308的数量为样品转移工具1100提供衡量要素。在一些情况下,根据待转移的样品的类型或该样品的制备方法,可能期望具有许多小样品捕获环1108。每个样品捕获环1108均可有效地拾取样品内的感兴趣的颗粒108。因此,可能期望使用具有许多样品捕获环1108的样品转移工具1100而不是将样品转移许多次。在一些实施方式中,样品转移工具1100使用户仅能够将样品从试管向载玻片转移一次,并且仍能收集说明性数量的感兴趣的颗粒108来进行成像。
图12A至图12C示出了样品转移工具1200的一个实施方案。与图11A至图11C所示的实施方案类似,样品转移工具1200包括细长构件1202、外环1204、一个或多个轮辐1206以及由外环与轮幅1206中的一个或多个轮幅的组合限定的一个或多个样品捕获环1208。在图12A至图12C所示的实施方案中,细长构件1202偏离外环1204的中心,转而附接到外环1204自身,而不是如图11A至图11C所示的轮幅1206中的一个或多个轮辐。
图13A至图13C示出了样品转移工具1300的一个实施方案。与图11A至图11C和图12A至图12C所示的实施方案类似,样品转移工具1300包括细长构件1302、外环1304、一个或多个轮辐1306以及一个或多个样品捕获环1308。该一个或多个样品捕获环1308由轮幅1306中的一个或多个轮幅和外环1304的至少一部分限定。样品捕获环1308限定空的内部空间,在该内部空间中可通过使用表面张力来捕获和拾取样品。
在图13A至图13C所示的实施方案中,外环1304包括肋条或锯齿形边缘。外环1304的肋条可用于向样品提供附加接触点,因此可用于增加样品被样品转移工具1300捕获的可能性。外环1304上的肋条特别可用于某些样品或溶液。在另外一个实施方案中,轮幅1304可另外包括肋条或锯齿形边缘。
进一步在样品转移工具1300的该实施方案中,存在附接到外环1304的八个轮幅1306。这八个轮幅1306连同外环1304一起限定八个单独样品捕获环1308。应当理解,由外环1304限定的内部空间内可存在任何数量的环1306。因此,样品转移工具1300可包括任何合适数量的样品捕获环1308。
图14是使用光学显微镜法聚焦于样品的方法1400的示意性流程图。方法1400可由使用光学显微镜的人来执行和/或由与光学显微镜的相机通信的计算机程序来执行。方法1400可通过计算机系统操作分析光学显微镜所捕获的图像的机器学习算法来执行。
方法1400在1402处开始,此时人或计算机程序识别印刷在盖玻片的表面上的基准标记。方法1400在1404处继续,此时人或计算机程序使光学显微镜聚焦于基准标记以计算基准标记的焦距。方法1400在1406处继续,此时人或计算机程序至少部分地基于基准标记的焦距来计算限定盖玻片的表面的参考焦平面。可基于使光学显微镜聚焦于基准标记的结果来确定基准标记的位置。
图15是使用光学显微镜法聚焦于样品的方法1500的示意性流程图。方法1500可由使用光学显微镜的人来执行和/或由与光学显微镜的相机通信的计算机程序来执行。方法1500可通过计算机系统操作分析光学显微镜所捕获的图像的机器学习算法来执行。
方法1500在1502处开始,此时人或计算机程序识别印刷在载玻片的表面上的基准标记。方法1500在1504处继续,此时人或计算机程序使光学显微镜聚焦于基准标记以计算基准标记的焦距。方法1500在1506处继续,此时人或计算机程序至少部分地基于基准标记的焦距来计算限定载玻片的表面的参考焦平面。可基于使光学显微镜聚焦于基准标记的结果来确定基准标记的位置。
图16是使用光学显微镜法聚焦于样品的方法1600的示意性流程图。方法1600可由使用光学显微镜的人来执行和/或由与光学显微镜的相机通信的计算机程序来执行。方法1600可通过计算机系统操作分析光学显微镜所捕获的图像的机器学习算法来执行。
方法1600在1602处开始,此时人或计算机程序识别印刷在盖玻片上的基准标记,其中基准标记印刷在盖玻片的相对于光学显微镜的目镜或相机的底表面上。方法1600在1604处继续,此时人或计算机程序使光学显微镜聚焦于基准标记。方法1600在1606处继续,此时人或计算机程序基于基准标记的位置来计算限定盖玻片的底表面的参考焦平面。可基于使光学显微镜聚焦于基准标记的结果来确定基准标记的位置。
图17是使用光学显微镜法聚焦于样品的方法1700的示意性流程图。方法1700可由使用光学显微镜的人来执行和/或由与光学显微镜的相机通信的计算机程序来执行。方法1700可通过计算机系统操作分析光学显微镜所捕获的图像的机器学习算法来执行。
方法1700在1702处开始,此时人或计算机程序识别印刷在载玻片上的基准标记,其中基准标记印刷在载玻片的相对于光学显微镜的目镜或相机的顶表面上。方法1700在1704处继续,此时人或计算机程序使光学显微镜聚焦于基准标记。方法1700在1706处继续,此时人或计算机程序基于基准标记的位置来计算限定载玻片的顶表面的参考焦平面。可基于使光学显微镜聚焦于基准标记的结果来确定基准标记的位置。
图18是使用光学显微镜法聚焦于样品的方法1800的示意性流程图。方法1800可由使用光学显微镜的人来执行和/或由与光学显微镜的相机通信的计算机程序来执行。方法1800可通过计算机系统操作分析光学显微镜所捕获的图像的机器学习算法来执行。
方法1800在1802处开始,此时人或计算机程序识别印刷在盖玻片的表面或载玻片的表面上的基准标记。人或计算机程序在1804处使光学显微镜聚焦于基准标记以计算基准标记的焦距。人或计算机程序在1806处基于基准标记的焦距来计算限定盖玻片的表面或载玻片的表面的参考焦平面。
图19是用于基于印刷在盖玻片或载玻片上的多个基准标记来限定盖玻片或载玻片的参考焦平面的方法1900的示意性流程图。方法1900可由使用光学显微镜的人来执行和/或由与光学显微镜的相机通信的计算机程序来执行。方法1900可通过计算机系统操作分析光学显微镜所捕获的图像的机器学习算法来执行。
方法1900在1902处开始,此时人或计算系统使光学显微镜聚焦于印刷在盖玻片或载玻片的表面上的多个基准标记中的每个基准标记以计算该多个基准标记中的每个基准标记的焦距。在一个实施方案中,光学显微镜以一次一个基准标记的方式独立地聚焦于该多个基准标记中的每个基准标记。方法1900在1904处继续,此时人或计算机系统使该多个基准标记中的每个基准标记的焦距与该多个基准标记中的每个基准标记的对应位置匹配。可基于整个盖玻片或载玻片的概览图像来确定对应位置。方法1900在1906处继续,此时人或计算系统基于该多个基准标记1906中的每个基准标记的对应焦距和位置来计算盖玻片或载玻片的参考焦平面。盖玻片或载玻片的参考焦平面进一步限定夹在盖玻片与载玻片之间的样品的表面。
以下实施例涉及进一步的实施方案。
实施例1是一种方法。该方法包括识别印刷在盖玻片的表面上的基准标记并且使光学显微镜聚焦于基准标记以计算基准标记的焦距。该方法包括基于基准标记的焦距来计算限定盖玻片的表面的参考焦平面。
实施例2是根据实施例1所述的方法,其中:将基准标记印刷在盖玻片的相对于光学显微镜的目镜或相机的底表面上,使得底表面与样品接触;限定盖玻片的表面的参考焦平面限定盖玻片的所述底表面;并且限定盖玻片的底表面的参考焦平面进一步限定样品的相对于光学显微镜的目镜或相机的顶表面。
实施例3是根据实施例1至2中任一项所述的方法,该方法还包括:用光学显微镜扫描盖玻片以生成概览扫描;基于概览扫描来识别印刷在盖玻片的表面上的多个基准标记;基于概览扫描来计算印刷在盖玻片的表面上的基准标记的数量;以及基于概览扫描来识别印刷在盖玻片上的该多个基准标记中的每个基准标记的位置。
实施例4是根据实施例1至3中任一项所述的方法,其中计算限定盖玻片的表面的参考焦平面包括:使光学显微镜聚焦于印刷在盖玻片上的该多个基准标记中的每个基准标记以计算该多个基准标记中的每个基准标记的焦距;使多个基准标记中的每个基准标记的焦距与多个基准标记中的每个基准标记的对应位置匹配;以及基于该多个基准标记中的每个基准标记的对应焦距和位置来计算参考焦平面。
实施例5是根据实施例1至4中任一项所述的方法,其中计算参考焦平面还包括:基于两个或更多个基准标记的焦距来内推该两个或更多个基准标记之间的空间的焦距;并且外推该多个基准标记中的某个基准标记的焦距以估计围绕该某个基准标记的区域的焦距。
实施例6是根据实施例1至5中任一项所述的方法,其中计算参考焦平面还包括:识别该多个基准标记中的三个基准标记;识别该三个基准标记中的每个基准标记的焦距;识别该三个基准标记中的每个基准标记相对于该概览扫描的位置;并且至少部分地基于该三个基准标记中的每个基准标记的焦距和位置来将平面拟合到由该三个基准标记限定的三角形。
实施例7是根据实施例1至6中任一项所述的方法,其中计算参考焦平面还包括:识别该多个基准标记中的四个或更多个基准标记;基于该四个或更多个基准标记中的每个基准标记的焦距和该四个或更多个基准标记中的每个基准标记相对于该概览扫描的位置来识别该四个或更多个基准标记中的每个基准标记的(x,y,z)坐标;并且将弯曲表面拟合到由该四个或更多个基准标记中的每个基准标记的(x,y,z)坐标限定的点以生成与盖玻片的整个表面近似的表面拓扑结构。
实施例8是根据实施例1至7中任一项所述的方法,其中将基准标记印刷在盖玻片的相对于光学显微镜的目镜或相机的底表面上,使得底表面与样品接触,并且其中该方法还包括:基于光学显微镜在一个或多个基准标记上的聚焦的结果来计算离样品的预测的焦距;以及通过测试大于离样品的预测的焦距和/或小于离样品的预测的焦距的焦距阈值范围来精化样品上的聚焦。
实施例9是根据实施例1至8中任一项所述的方法,该方法还包括:用光学显微镜扫描盖玻片以生成概览扫描;识别该概览扫描内的该基准标记;基于离该基准标记的该焦距来计算该基准标记的z轴位置;以及基于基准标记相对于概览扫描的位置来计算基准标记的x轴和y轴位置。
实施例10是根据实施例1至9中任一项所述的方法,该方法还包括通过使用样品转移工具将样品放在载玻片上来使样品做好用光学显微镜成像的准备,其中样品转移工具包括:细长构件;外环,该外环限定内部空间;以及一个或多个轮辐,该一个或多个轮辐附接到外环并且设置在外环的内部空间内;其中该一个或多个轮辐中的至少一个轮辐和该外环的至少一部分限定用于捕获该样品的样品捕获环;并且其中细长构件大约垂直于该一个或多个轮辐。
实施例11是根据实施例1至10中任一项所述的方法,该方法还包括识别盖玻片上的手性指示符并且基于手性指示符来确定盖玻片的取向。
实施例12是根据实施例1至11中任一项所述的方法,其中将基准标记印刷在盖玻片的相对于光学显微镜的目镜或相机的底表面上,使得底表面与样品接触,并且其中该方法还包括通过使光学显微镜聚焦于预测的颗粒深度来定位样品内的感兴趣的颗粒,其中预测的颗粒深度是相对于盖玻片的底表面的颗粒位于样品中的估计的深度。
实施例13是根据实施例1至12中任一项所述的方法,其中使光学显微镜聚焦于预测的颗粒深度包括基于参考焦平面来确定相对于光学显微镜的预测的颗粒深度。
实施例14是根据实施例1至13中任一项所述的方法,该方法还包括:接收由与光学显微镜相关联的相机捕获的盖玻片的图像;评估该图像以确定是否在该图像中捕获基准标记;响应于该图像中没有基准标记可见,改变与该光学显微镜相关联的该相机的视野;接收由该相机以该改变的视野捕获的该盖玻片的新图像;以及评估该新图像以确定是否在该图像中捕获基准标记。
实施例15是根据实施例1至14中任一项所述的方法,该方法还包括响应于在该图像和/或新图像中捕获基准标记:评估该图像和/或新图像以确定是否整个捕获的基准标记存在于该图像和/或新图像中或者捕获的基准标记的一部分存在于该图像和/或新图像中;响应于该捕获的基准标记的仅一部分存在于该图像和/或该新图像中,识别该捕获的基准标记的捕获的边缘轮廓;基于包括所有基准标记的该盖玻片的概览图像来从存储器检索该捕获的基准标记的预期的边缘轮廓;以及将捕获的边缘轮廓与预期的边缘轮廓进行比较以计算移动光学显微镜的载物台或物镜所需的估计的方向和距离,使得整个捕获的基准标记存在于光学显微镜的视野中。
实施例16是根据实施例1至15中任一项所述的方法,该方法还包括:使光学显微镜的载物台和/或物镜根据估计的方向和距离来移动;在移动之后确定该显微镜的该载物台和/或该物镜的(x,y)坐标;以及基于载物台和/或物镜的(x,y)坐标来在存储器中存储捕获的基准标记的(x,y)坐标。
实施例17是根据实施例1至16中任一项所述的方法,该方法还包括响应于在该图像和/或新图像中捕获基准标记:评估该图像和/或新图像以确定是否整个视野被捕获的基准标记覆盖;响应于该视野的仅一部分被该捕获的基准标记覆盖,识别该捕获的基准标记的捕获的边缘轮廓;基于包括所有基准标记的该盖玻片的概览图像来从存储器检索该捕获的基准标记的预期的边缘轮廓;以及将捕获的边缘轮廓与预期的边缘轮廓进行比较以计算移动光学显微镜的载物台或物镜所需的估计的方向和距离,使得光学显微镜的整个视野被基准标记覆盖。
实施例18是根据实施例1至17中任一项所述的方法,该方法还包括:使光学显微镜的载物台和/或物镜根据估计的方向和距离来移动;在移动之后确定该显微镜的该载物台和/或该物镜的(x,y)坐标;以及基于载物台和/或物镜的(x,y)坐标来在存储器中存储捕获的基准标记的(x,y)坐标。
实施例19是根据实施例1至18中任一项所述的方法,该方法还包括:基于包括印刷在盖玻片上的所有基准标记的概览图像来从存储器检索印刷在盖玻片上的第一基准标记的预期的边缘轮廓;基于用该光学显微镜捕获的图像来识别该第一基准标记的捕获的边缘轮廓;将该第一基准标记的该预期的边缘轮廓与该第一基准标记的该捕获的边缘轮廓进行比较;以及确定第一基准标记的预期的边缘轮廓是否在公认容限阈值内匹配第一基准标记的捕获的边缘轮廓。
实施例20是根据实施例1至19中任一项所述的方法,该方法还包括:识别盖玻片的印刷区域;以及基于盖玻片的印刷区域来优化被盖玻片覆盖的样品的扫描区域;其中基于扫描时间、扫描文件大小或测试灵敏度中的一者或多者来优化该扫描区域。
实施例21是一种方法。该方法包括识别印刷在载玻片的表面上的基准标记并且使光学显微镜聚焦于基准标记以计算基准标记的焦距。该方法包括基于基准标记的焦距来计算限定载玻片的表面的参考焦平面。
实施例22是根据实施例21所述的方法,其中:将基准标记印刷在载玻片的相对于光学显微镜的目镜或相机的顶表面上,使得载玻片的顶表面与样品接触;限定该载玻片的该表面的该参考焦平面限定该载玻片的该顶表面;并且限定载玻片的顶表面的参考焦平面进一步限定样品的相对于光学显微镜的目镜或相机的底表面。
实施例23是根据实施例21至22中任一项所述的方法,该方法还包括:用光学显微镜扫描载玻片以生成概览扫描;基于该概览扫描来识别印刷在该载玻片的该表面上的多个基准标记;基于该概览扫描来计算印刷在该载玻片的该表面上的基准标记的数量;以及基于概览扫描来识别印刷在载玻片上的该多个基准标记中的每个基准标记的位置。
实施例24是根据实施例21至23中任一项所述的方法,其中计算限定载玻片的表面的参考焦平面包括:使光学显微镜聚焦于印刷在载玻片上的该多个基准标记中的每个基准标记以计算该多个基准标记中的每个基准标记的焦距;使该多个基准标记中的每个基准标记的该焦距与该多个基准标记中的每个基准标记的对应位置匹配;以及基于该多个基准标记中的每个基准标记的对应焦距和位置来计算参考焦平面。
实施例25是根据实施例21至24中任一项所述的方法,其中计算参考焦平面还包括:基于两个或更多个基准标记的焦距来内推该两个或更多个基准标记之间的空间的焦距;并且外推该多个基准标记中的某个基准标记的焦距以估计围绕该某个基准标记的区域的焦距。
实施例26是根据实施例21至25中任一项所述的方法,其中计算参考焦平面还包括:识别该多个基准标记中的三个基准标记;识别该三个基准标记中的每个基准标记的焦距;识别该三个基准标记中的每个基准标记相对于该概览扫描的位置;并且至少部分地基于该三个基准标记中的每个基准标记的焦距和位置来将平面拟合到由该三个基准标记限定的三角形。
实施例27是根据实施例21至26中任一项所述的方法,其中计算参考焦平面还包括:识别该多个基准标记中的四个或更多个基准标记;基于该四个或更多个基准标记中的每个基准标记的焦距和该四个或更多个基准标记中的每个基准标记相对于该概览扫描的位置来识别该四个或更多个基准标记中的每个基准标记的(x,y,z)坐标;并且将弯曲表面拟合到由该四个或更多个基准标记中的每个基准标记的(x,y,z)坐标限定的点以生成与载玻片的整个表面近似的表面拓扑结构。
实施例28是根据实施例21至27中任一项所述的方法,其中将基准标记印刷在载玻片的相对于光学显微镜的目镜或相机的顶表面上,使得顶表面与样品接触,并且其中该方法还包括:基于光学显微镜在一个或多个基准标记上的聚焦的结果来计算离样品的预测的焦距;以及通过测试大于离样品的预测的焦距和/或小于离样品的预测的焦距的焦距阈值范围来精化样品上的聚焦。
实施例29是根据实施例21至28中任一项所述的方法,该方法还包括:用光学显微镜扫描载玻片以生成概览扫描;识别该概览扫描内的该基准标记;基于离该基准标记的该焦距来计算该基准标记的z轴位置;以及基于基准标记相对于概览扫描的位置来计算基准标记的x轴和y轴位置。
实施例30是根据实施例21至29中任一项所述的方法,该方法还包括通过使用样品转移工具将样品放在载玻片上来使样品做好用光学显微镜成像的准备,其中样品转移工具包括:细长构件;外环,该外环限定内部空间;以及一个或多个轮辐,该一个或多个轮辐附接到外环并且设置在外环的内部空间内;其中该一个或多个轮辐中的至少一个轮辐和该外环的至少一部分限定用于捕获该样品的样品捕获环;并且其中细长构件大约垂直于该一个或多个轮辐。
实施例31是根据实施例21至30中任一项所述的方法,该方法还包括识别载玻片上的手性指示符并且基于手性指示符来确定载玻片的取向。
实施例32是根据实施例21至31中任一项所述的方法,其中将基准标记印刷在载玻片的相对于光学显微镜的目镜或相机的顶表面上,使得顶表面与样品接触,并且其中该方法还包括通过使光学显微镜聚焦于预测的颗粒高度来定位样品内的感兴趣的颗粒,其中预测的颗粒高度是相对于载玻片的顶表面的颗粒位于样品中的估计的垂直距离。
实施例33是根据实施例21至32中任一项所述的方法,其中使光学显微镜聚焦于预测的颗粒深度包括基于参考焦平面来确定相对于光学显微镜的预测的颗粒深度。
实施例34是根据实施例21至33中任一项所述的方法,该方法还包括:接收由与光学显微镜相关联的相机捕获的载玻片的图像;评估该图像以确定是否在该图像中捕获基准标记;响应于该图像中没有基准标记可见,改变与该光学显微镜相关联的该相机的视野;接收由该相机以该改变的视野捕获的该载玻片的新图像;以及评估该新图像以确定是否在该图像中捕获基准标记。
实施例35是根据实施例21至34中任一项所述的方法,该方法还包括响应于在该图像和/或新图像中捕获基准标记:评估该图像和/或新图像以确定是否整个捕获的基准标记存在于该图像和/或新图像中或者捕获的基准标记的一部分存在于该图像和/或新图像中;响应于该捕获的基准标记的仅一部分存在于该图像和/或该新图像中,识别该捕获的基准标记的捕获的边缘轮廓;基于包括所有基准标记的载玻片的概览图像来从存储器检索捕获的基准标记的预期的边缘轮廓;以及将捕获的边缘轮廓与预期的边缘轮廓进行比较以计算移动光学显微镜的载物台或物镜所需的估计的方向和距离,使得整个捕获的基准标记存在于光学显微镜的视野中。
实施例36是根据实施例21至35中任一项所述的方法,该方法还包括:使光学显微镜的载物台和/或物镜根据估计的方向和距离来移动;在移动之后确定该显微镜的该载物台和/或该物镜的(x,y)坐标;以及基于载物台和/或物镜的(x,y)坐标来在存储器中存储捕获的基准标记的(x,y)坐标。
实施例37是根据实施例21至36中任一项所述的方法,该方法还包括响应于在该图像和/或新图像中捕获基准标记:评估该图像和/或新图像以确定是否整个视野被捕获的基准标记覆盖;响应于该视野的仅一部分被该捕获的基准标记覆盖,识别该捕获的基准标记的捕获的边缘轮廓;基于包括所有基准标记的载玻片的概览图像来从存储器检索捕获的基准标记的预期的边缘轮廓;以及将捕获的边缘轮廓与预期的边缘轮廓进行比较以计算移动光学显微镜的载物台或物镜所需的估计的方向和距离,使得光学显微镜的整个视野被基准标记覆盖。
实施例38是根据实施例21至37中任一项所述的方法,该方法还包括:使光学显微镜的载物台和/或物镜根据估计的方向和距离来移动;在移动之后确定该显微镜的该载物台和/或该物镜的(x,y)坐标;以及基于载物台和/或物镜的(x,y)坐标来在存储器中存储捕获的基准标记的(x,y)坐标。
实施例39是根据实施例21至38中任一项所述的方法,该方法还包括:基于包括印刷在载玻片上的所有基准标记的概览图像来从存储器检索印刷在载玻片上的第一基准标记的预期的边缘轮廓;基于用该光学显微镜捕获的图像来识别该第一基准标记的捕获的边缘轮廓;将该第一基准标记的该预期的边缘轮廓与该第一基准标记的该捕获的边缘轮廓进行比较;以及确定第一基准标记的预期的边缘轮廓是否在公认容限阈值内匹配第一基准标记的捕获的边缘轮廓。
实施例40是根据实施例21至39中任一项所述的方法,该方法还包括:识别载玻片的印刷区域;以及基于载玻片的印刷区域来优化设置在载玻片上的样品的扫描区域;其中基于扫描时间、扫描文件大小或测试灵敏度中的一者或多者来优化该扫描区域。
实施例41是一种装置。该装置包括细长构件和限定内部空间的外环。该装置包括一个或多个轮辐,该一个或多个轮辐附接到外环并且设置在由外环限定的内部空间内。
实施例42是根据实施例41所述的装置,其中该一个或多个轮辐中的至少一个轮辐和外环的至少一部分限定样品捕获环。样品捕获环限定空的内部空间,在该内部空间中可通过表面张力来捕获液体样品。
实施例43是根据实施例41至42中任一项所述的装置,其中细长构件大约垂直于该一个或多个轮辐。
实施例44是根据实施例41至43中任一项所述的装置,其中该一个或多个轮辐中的至少一个轮辐附接到细长构件。
实施例45是根据实施例41至44中任一项所述的装置,其中外环或该一个或多个轮辐中的一者或多者包括肋条。
实施例46是一种方法。该方法包括通过用根据实施例41至45中任一项所述的装置拾取样品来使样品做好用光学显微镜成像的准备。
实施例47是根据实施例46所述的方法,其中拾取样品包括使设置在试管内的溶液的顶表面与根据实施例41至45中任一项所述的装置的外表面接触。
实施例48是根据实施例46至47中任一项所述的方法,其中拾取样品包括使设置在试管内的样品的弯液面与根据实施例41至45中任一项所述的装置的外表面接触。
实施例49是根据实施例46至48中任一项所述的方法,该方法还包括通过在载玻片上轻拍该装置的外环来将样品转移到载玻片以便用光学显微镜成像。
实施例50是根据实施例46至49中任一项所述的方法,该方法还包括基于装置中的轮幅的数量来选择根据实施例41至45中任一项所述的装置,其中基于样品中的颗粒的数量、样品中的颗粒的尺寸、样品中的颗粒的预测的颗粒深度等等中的一者或多者来选择轮幅的数量。
本说明书通篇对“实施例”的引用意指结合该实施例描述的特定特征、结构或特性被包括在本公开的至少一个实施方案中。因此,在本说明书中各处出现的短语“在实施例中”不一定都指同一实施方案。
如本文所用,为了方便起见,可以在共同列表中呈现多个项目、结构元件、组成元素和/或材料。然而,这些列表应当被解释为好像列表的每个成员被单独地标识为单独且唯一的成员。因此,在没有相反指示的情况下,这种列表的单独成员不应仅基于成员在共同群组中的呈现而解释为相同列表的任何其他成员的实际等同物。另外,本公开的各种实施方案和实施例可以连同其各种部件的替代形式一起在本文中提及。应当理解,此类实施方案、实施例和替代形式不应被解释为彼此的实际等同物,而是被认为是本公开的单独且自主的表示。
尽管为了清楚起见,已经较详细地描述了前述内容,但是显而易见的是,在不脱离其原理的情况下,可以进行某些改变和修改。应当注意,存在实现本文所述的过程和装置的许多替代方式。因此,本发明实施方案应被认为是说明性的而非限制性的。
本领域技术人员将理解,在不脱离本公开的基本原理的情况下,可以对上述实施方案的细节进行许多改变。因此,本公开的范围应当仅由权利要求(如果有的话)来确定。
- 用于识别光学显微镜法的参考焦平面的印刷盖玻片和载玻片
- 用于光学形状感测系统中的发起点识别的参考标记