一种车辆位置定位方法及装置
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及无线传感器网络定位领域,尤其涉及一种车辆位置定位方法及装置。
背景技术
GPS定位消耗能量较高,定位误差较大,而且在障碍物较多的地方定位信号比较差,不适合用于在复杂城市道路环境中大规模的采集车辆位置信息,所以采用无线传感器网络定位方法用于智能交通系统的车辆位置信息采集,可以实时监测车辆的位置信息。通过在监测区域布置具有传感器的监测装置与被测车辆构成无线传感器网络,实时获取被测车辆的位置信息。由于采用超声波直接测距方法求解被测车辆的位置信息,温度的变化会改变超声波在空气中的传播速度,从而导致测距产生误差,同时无线传感器网络中的各监测装置与被测车辆很难保持时间同步,导致超声波信号传播的时间产生误差,严重降低了定位精度。
发明内容
本文提出一种车辆位置定位方法及装置,以用于解决无线传感器网络因温度变化和时间不同步而导致的定位误差的问题。
本发明的技术方案为:
本发明实施例提供了一种车辆位置定位方法,包括:
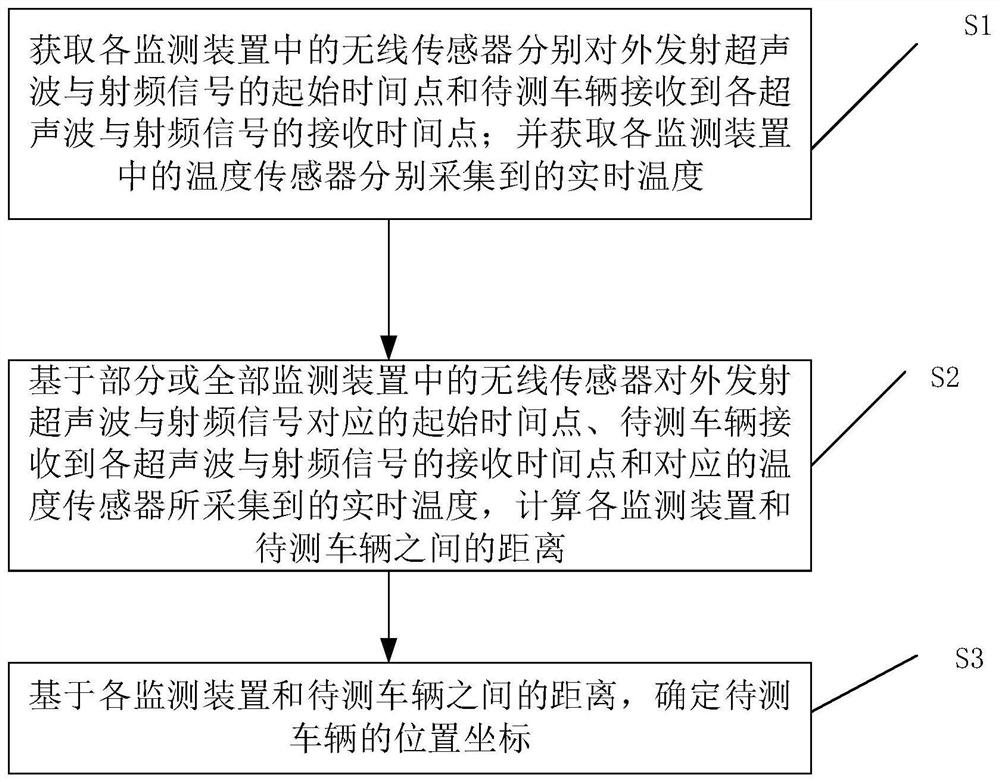
步骤S1,获取各监测装置中的无线传感器分别对外发射超声波与射频信号的起始时间点和待测车辆接收到各超声波与射频信号的接收时间点;并获取各监测装置中的温度传感器分别采集到的实时温度;
步骤S2,基于部分或全部监测装置中的无线传感器对外发射超声波与射频信号对应的起始时间点、待测车辆接收到各超声波与射频信号的接收时间点和对应的温度传感器所采集到的实时温度,计算各监测装置和待测车辆之间的距离;
步骤S3,基于各监测装置和待测车辆之间的距离,确定待测车辆的位置坐标。
优选地,步骤S2中计算各监测装置和待测车辆之间的距离的步骤包括:
通过公式:
计算第i个监测装置和待测车辆之间的距离d
T
超声波信号在空气中的传播速度通过公式:
V=V
计算获得,V
优选地,步骤S3中基于各监测装置和待测车辆之间的距离,确定待测车辆的位置坐标的步骤包括:
通过公式:
计算待测车辆的位置坐标(x,y),其中,(x
本发明实施例还提供了一种车辆位置坐标定位装置,包括:
获取模块,用于获取各监测装置中的无线传感器对外发射超声波与射频信号的起始时间点和待测车辆接收到各超声波与射频信号的接收时间点;并获取各监测装置中的温度传感器所采集到的实时温度;
计算模块,用于基于部分或全部监测装置中的无线传感器对外发射超声波与射频信号对应的起始时间点、待测车辆接收到各超声波与射频信号的接收时间点和对应的温度传感器所采集到的实时温度,计算各监测装置和待测车辆之间的距离;
确定模块,用于基于各监测装置和待测车辆之间的距离,确定待测车辆的位置坐标。
本发明的有益效果为:
本发明的上述方案,能够降低因温度变化和时间不同步对无线传感器定位精度的影响,从而得到精确的被测车辆位置信息。
附图说明
图1为总体方案流程图;
图2为智能交通系统无线传感器网络模型示意图;
图3为超声波直接测距示意图;
图4为到达时间差定位方法计算被测车辆位置示意图;
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
参照图1,本发明实施例提供了一种利用无线传感器对车辆进行位置定位方法,该方法包括:
步骤S1,获取各监测装置中的无线传感器分别对外发射超声波与射频信号的起始时间点和待测车辆接收到各超声波与射频信号的接收时间点;并获取各监测装置中的温度传感器分别采集到的实时温度。
步骤S2,基于部分或全部监测装置中的无线传感器对外发射超声波与射频信号对应的起始时间点、待测车辆接收到各超声波与射频信号的接收时间点和对应的温度传感器所采集到的实时温度,计算各监测装置和待测车辆之间的距离。
步骤S3,基于各监测装置和待测车辆之间的距离,确定待测车辆的位置坐标。
优选地,步骤S2中,计算各监测装置和待测车辆之间的距离的步骤包括:
通过公式:
计算第i个监测装置和待测车辆之间的距离d
超声波信号在空气中的传播速度通过公式:
V=V
计算获得,V
优选地,步骤S3中,基于各监测装置和待测车辆之间的距离,确定待测车辆的位置坐标的步骤包括:
通过公式:
计算待测车辆的位置坐标(x,y),其中,(x
下面,将结合附图对本发明上述方法进行描述,具体来说,其实施步骤如下:
Step1:如图2所示,建立智能交通系统无线传感器网络模型。
整个智能交通系统无线传感器网络由装有传感器的M个监测装置和N个被测车辆组成。其中,第m个监测装置的位置可以表示为θ
以智能交通系统的十字路口为例,在监测区域内相应的位置部署4个监测装置,分别为监测装置A、B、C、D,监测装置的位置信息已知,分别为θ
Step2:如图3所示,利用超声波直接测距方法求解被测车辆的位置坐标。
已知监测装置A、B、D的位置信息分别为θ
所以计算第i个监测装置与待测车辆之间的距离d
d
ΔT
监测装置A、B、D到待测车辆之间的距离分别记为d
化简可得:
由公式(1)可计算求得d
Step3:利用温度传感器降低超声波直接测距引起的误差。
由于超声波在空气中的传播速度与空气密度有关,而空气密度容易受到温度的影响而发生变化,所以导致超声波的传播速度不是一个恒定的值,因此通过在监测装置安装温度传感器,随着信号的发射频率实时更新温度,从而降低超声波直接测距因温度变化而产生的误差,可得超声波速度与温度的关系如下式:
V=V
上式中,V
Step4:如图4所示,采用到达时间差定位方法计算被测车辆的位置。
由于智能交通系统无线传感器网络中含有大量的监测装置和被测车辆,其自带的时钟不能保证所有的节点都时间同步,所以会导致计算超声波传播所用的时间产生误差,因此通过到达时间差定位方法来抑制因系统产生的误差。其具体方法如下,监测装置通过发射两种不同传播速度的超声波信号和射频信号,时间记作T
因此可得下式:
可以计算得出:
最后可计算求得d
本发明的上述方案,能够降低因温度变化和时间不同步对无线传感器定位精度的影响,从而得到精确的被测车辆位置信息。
本发明实施例还提供了一种车辆位置坐标定位装置,包括:
获取模块,用于获取各监测装置中的无线传感器对外发射超声波与射频信号的起始时间点和待测车辆接收到各超声波与射频信号的接收时间点;并获取各监测装置中的温度传感器所采集到的实时温度;
计算模块,用于基于部分或全部监测装置中的无线传感器对外发射超声波与射频信号对应的起始时间点、待测车辆接收到各超声波与射频信号的接收时间点和对应的温度传感器所采集到的实时温度,计算各监测装置和待测车辆之间的距离;
确定模块,用于基于各监测装置和待测车辆之间的距离,确定待测车辆的位置坐标。
以上实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围,均应包含在本申请的保护范围之内。
- 使用推算定位法追踪车辆位置和车辆方位角的方法以及实现该方法的追踪装置
- 车辆位置处理装置、车辆控制装置、车辆位置处理方法和车辆控制方法