一种基于互联网的区域分片调蓄处理排水系统
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及排水处理技术领域,具体为一种基于互联网的区域分片调蓄处理排水系统。
背景技术
排水系统是指排水的收集、输送、水质的处理和排放等设施以一定方式组合成的总体,用以除涝、防渍、防盐的各级排水沟道及建筑物的总称;
目前,城市的排水是通过专业的技术人员在远程监控排水的情况,并依据排得到的相关数值,去进行判断,较为耗费人力资源,无法自动对排水情况进行数据采集,以及数据的分析,且无法依据自主分析的相关数据进行排水的安全判断;
为此,我们提出一种基于互联网的区域分片调蓄处理排水系统。
发明内容
本发明的目的在于提供一种基于互联网的区域分片调蓄处理排水系统,通过识别单元的设置,自动对采集的相关数据进行快速识别,并通过排水分析单元,对识别的相关数据进行分析,增加数据分析的精确性,实现无需技术人员实时看管,通过划分判定单元的设置,依据分析的相关数据进行设定数据的判断,节省时间,提高工作效率。
本发明的目的可以通过以下技术方案实现:
一种基于互联网的区域分片调蓄处理排水系统,包括摄像头、识别单元、云存储单元、排水分析单元、划分判定单元、警报单元和智能设备;
所述摄像头用于实时检测城市地区下雨时的道路影像,并生成路影信息,将路影信息传输至识别单元;
所述云存储单元内存储有城市道路相关的道况信息,所述道况信息包括道况影像以及匹配数据,匹配数据包括街道号数据和街道排水数据,所述街道号数据指代对应道况影像信息对应的城市道路标号,街道排水数据指代街道号数据对应的城市排水相关的规格,街道排水数据包括横排数据、纵排数据和深排数据,其中,横排数据指代城市道路中排水沟的长度数据与排水沟的宽度进行相乘得到的数值,纵排数据指代城市道路中排水沟的高度数据与排水沟的长度进行相乘得到的数值,深排数据指代城市道路中排水沟的高度数据与排水沟的宽度进行相乘得到的数值,所述识别单元从云存储单元内获取道况信息,并将道况信息与路影信息一同进行识别操作,得到处理影像数据、横排数据、纵排数据和深排数据,并将其一同传输至排水分析单元;
所述排水分析单元用于对处理影像数据、横排数据、纵排数据和深排数据一同进行排水分析操作,得到虚横值、虚纵值、虚拟转换因子和虚竖值,并将其一同传输至划分判定单元;
所述云存储单元内还存储有存储信息,存储信息包括浮称数据、浮污数据和面水数据,其中,浮称数据指代漂浮物对应的名称数据以及图像数据,浮污数据指代漂浮物在不同速度的水流中的运行速度,即漂浮物相对于在不同水流中相对于静止不动的物件的移动速度,面水数据指代水面的图像,所述划分判定单元用于从云存储单元内获取存储信息,并将其与虚横值、虚纵值、虚拟转换因子和虚竖值一同进行划分判定操作,得到安全信号和危险信号,并将其传输至警报单元;
警报单元接收安全信号和危险信号,并对其进行识别,当识别到安全信号时,将其发送至智能设备,当识别到危险信号时,将其转换为危险警报信号,并将危险警报信号发送至智能设备;
所述智能设备接收安全信号和危险警报信号,并发出对应的提示。
作为本发明的进一步改进方案:识别操作的具体操作过程为:
步骤一:获取路影信息和道况影像,并将其进行匹配,具体为:当从道况影像中匹配到路影信息时,则判定该路影信息存在,生成存在信号,当无法从道况影像中匹配到路影信息时,则判定该路影信息不存在,生成不存在信号;
步骤二:提取存在信号和不存在信号,并对其进行识别,当识别到存在信号时,则自动提取路况影像对应的横排数据、纵排数据和深排数据,同时将该路影信息标定为处理影像数据,当识别到不存在信号时,则不进行数据提取;
步骤三:提取处理影像数据、横排数据、纵排数据和深排数据。
作为本发明的进一步改进方案:排水分析操作的具体操作过程为:
F1:获取横排数据、纵排数据和深排数据,并对其进行细节分析,细节分析的具体过程为:
S1:获取横排数据,将横排数据进行分解,将其中处理而成的两个数值分别标定为A1和A2,获取纵排数据,将纵排数据进行分解,将其中处理而成的两个数据分别标定为A1和A3,获取深排数据,将深排数据进行分解,将其中处理而成的两个数据分别标定为A3和A2;
S2:依据上述S1得出的A1、A2和A3,将A1和A2与横排数据带入到计算式:A1*A2=HP,其中HP表示为横排数据,将A1和A3与纵排数据带入到计算式:A1*A3=ZP,其中ZP表示为纵排数据,将A2和A3与深排数据带入到计算式:A2*A3=SP,其中SP表示为深排数据;
S3:提取上述S2中的三个计算式,并将三个计算式进行三元一次方程的求解,从而得到数值A1、A2和A3,依据横排数据、纵排数据和深排数据三者的定义,将A1标定为横向值,A2标定为纵向值,A3标定为为竖值;
F2:获取处理影像数据,依据X、Y和Z建立一个虚拟空间直角坐标系,并将处理影像数据在虚拟空间直角坐标系中进行坐标标记,从而得到若干个坐标点,选取出排水道两端Z轴相同的若干个坐标点,将其标定为横向选定坐标,选取出横向选定坐标中X轴坐标相同的坐标点,并对其进行Y轴差值计算,将Y轴差值标定为虚横值;
F3:提取出虚横值,并将其横向值带入到比值计算式:虚横值*虚拟转换因子=横向值,计算出虚拟转换因子,依据虚拟转换因子以及纵向值和竖值,计算排水道的虚纵值和虚竖值;
F4:提取虚横值、虚纵值、虚拟转换因子和虚竖值。
作为本发明的进一步改进方案:划分判定操作的具体操作过程为:
R1:获取浮称数据和影像数据,并将其进行匹配,当浮称数据内图像数据的与影像数据的匹配结果一致时,则提取图像数据对应的名称数据,当浮称数据内图像数据的与处理影像数据的匹配结果不一致时,则不提取浮称数据内的名称数据;
R2:获取面水数据,并将其与处理影像数据进行匹配,并将其标定为面水影像数据,在虚拟空间直角坐标系中标定为面水影像数据的坐标点,并将其标定为面水坐标点,依据面水坐标点的Z轴值与处理影像数据坐标标记的最大Z轴值进行差值计算,计算出Z轴差值,并将其标定为深度值;
R3:获取处理影像数据并对其进行漂浮物识别,具体为:当在处理影像数据中的面水数据上识别到除面水数据以外的影像时,对其进行坐标点标定,并将该点标定为污浮坐标点,获取两个不同时间点内的污浮坐标点,并依据勾股定理计算出两个污浮坐标点之间的距离,并将其标定为点距值,同时计算两个不同时间点的差值,将其标定为计差值,将点距值和计差值带入到速度计算式中,计算出运动速度;
R4:提取运动速度数据,并将其与浮污数据进行匹配,选取出对应的浮污数据,并依据浮污数据选取出水流速度,将其标定为浮速数据;
R5:提取浮速数据、虚横值、虚纵值、虚拟转换因子和深度值,并对其进行排水计算,具体为:
J1:将虚横值与浮速数据带入到计算式:浮速数据*间值=虚横值,计算出间值,将间值、虚纵值和深度值三者进行乘积计算,计算得到虚体值,其中,虚体值指代在排水沟内水的体积;
J2:将虚体值和虚拟转换因子与排水值一同带入到计算式:虚体值=虚拟转换因子*排水值*时间值,计算出时间值,其中,排水值为预设的每个时间单位的排水量大小;
J3:提取时间值,并将其与安全值进行比对,当时间值小于安全值,则判定能在设定时间内将水排出,生成安全信号,当时间值大于等于安全值时,则判定不能在设定时间内将水排出,生成危险信号,其中,安全值指代预设的安全时间大小;
R6:提取安全信号和危险信号。
本发明的有益效果:
(1)通过排水分析单元的设置,将识别单元内获取的横排数据、纵排数据和深排数据进行细节分析,依据细节分析的结果判定出实际数值,来分析虚拟数值,并依据虚拟数值计算出虚拟与实际之间的转换值,增加数据分析的精确性,应用虚拟与显示之间的转化关系计算出所需要的相关数据,节省时间,提高工作效率。
(2)通过划分判定单元的设置,从云存储单元内获取存储信息,并将其与虚横值、虚纵值、虚拟转换因子和虚竖值一同进行数据分析,从而对相关数据进行进一步处理,依据虚拟的影像进行水流量的计算,并且依据分析的结果进行排水的判定,相较于现有的人为判定,节省了时间,增加了判定的准确性。
附图说明
下面结合附图对本发明作进一步的说明;
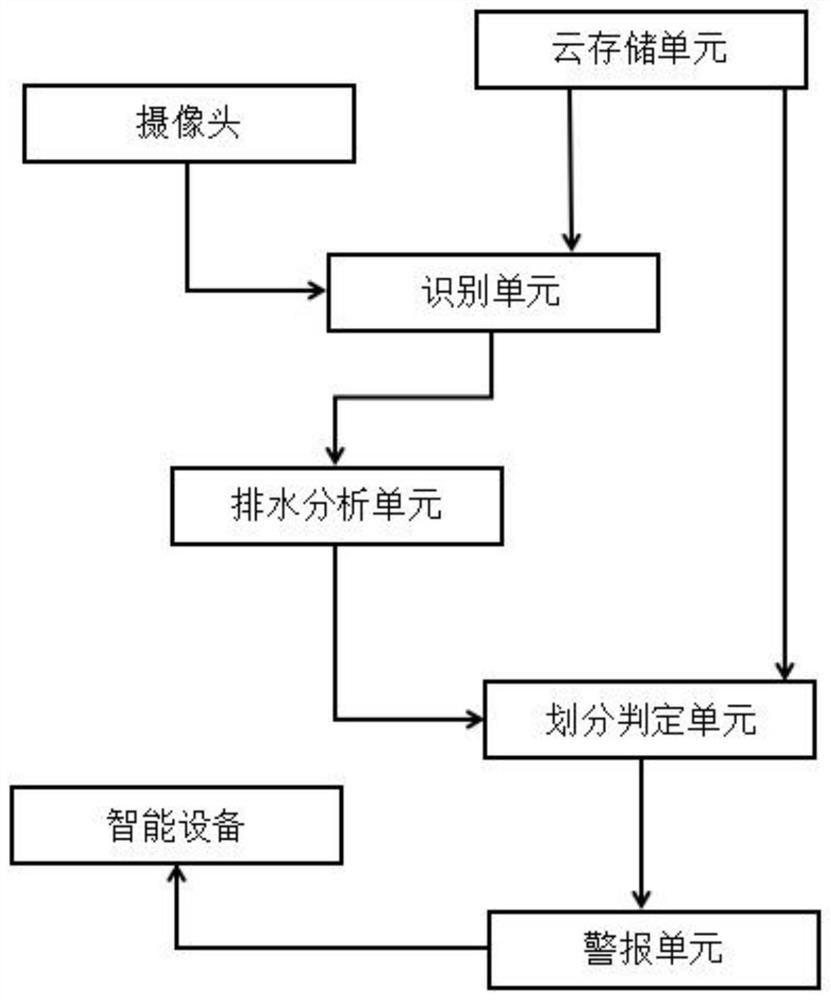
图1是本发明的系统框图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1所示,本发明为一种基于互联网的区域分片调蓄处理排水系统,包括摄像头、识别单元、云存储单元、排水分析单元、划分判定单元、警报单元和智能设备;
摄像头用于实时检测城市地区下雨时的道路影像,并生成路影信息,将路影信息传输至识别单元;
云存储单元内存储有城市道路相关的道况信息,道况信息包括道况影像以及匹配数据,匹配数据包括街道号数据和街道排水数据,街道号数据指代对应道况影像信息对应的城市道路标号,街道排水数据指代街道号数据对应的城市排水相关的规格,街道排水数据包括横排数据、纵排数据和深排数据,其中,横排数据指代城市道路中排水沟的长度数据与排水沟的宽度进行相乘得到的数值,纵排数据指代城市道路中排水沟的高度数据与排水沟的长度进行相乘得到的数值,深排数据指代城市道路中排水沟的高度数据与排水沟的宽度进行相乘得到的数值,识别单元从云存储单元内获取道况信息,并将道况信息与路影信息一同进行识别操作,识别操作的具体操作过程为:
步骤一:获取路影信息和道况影像,并将其进行匹配,具体为:当从道况影像中匹配到路影信息时,则判定该路影信息存在,生成存在信号,当无法从道况影像中匹配到路影信息时,则判定该路影信息不存在,生成不存在信号;
步骤二:提取存在信号和不存在信号,并对其进行识别,当识别到存在信号时,则自动提取路况影像对应的横排数据、纵排数据和深排数据,同时将该路影信息标定为处理影像数据,当识别到不存在信号时,则不进行数据提取;
步骤三:提取处理影像数据、横排数据、纵排数据和深排数据,并将其一同传输至排水分析单元;
排水分析单元用于对处理影像数据、横排数据、纵排数据和深排数据一同进行排水分析操作,排水分析操作的具体操作过程为:
F1:获取横排数据、纵排数据和深排数据,并对其进行细节分析,细节分析的具体过程为:
S1:获取横排数据,将横排数据进行分解,将其中处理而成的两个数值分别标定为A1和A2,获取纵排数据,将纵排数据进行分解,将其中处理而成的两个数据分别标定为A1和A3,获取深排数据,将深排数据进行分解,将其中处理而成的两个数据分别标定为A3和A2;
S2:依据上述S1得出的A1、A2和A3,将A1和A2与横排数据带入到计算式:A1*A2=HP,其中HP表示为横排数据,将A1和A3与纵排数据带入到计算式:A1*A3=ZP,其中ZP表示为纵排数据,将A2和A3与深排数据带入到计算式:A2*A3=SP,其中SP表示为深排数据;
S3:提取上述S2中的三个计算式,并将三个计算式进行三元一次方程的求解,从而得到数值A1、A2和A3,依据横排数据、纵排数据和深排数据三者的定义,将A1标定为横向值,A2标定为纵向值,A3标定为为竖值;
F2:获取处理影像数据,依据X、Y和Z建立一个虚拟空间直角坐标系,并将处理影像数据在虚拟空间直角坐标系中进行坐标标记,从而得到若干个坐标点,选取出排水道两端Z轴相同的若干个坐标点,将其标定为横向选定坐标,选取出横向选定坐标中X轴坐标相同的坐标点,并对其进行Y轴差值计算,将Y轴差值标定为虚横值;
F3:提取出虚横值,并将其横向值带入到比值计算式:虚横值*虚拟转换因子=横向值,计算出虚拟转换因子,依据虚拟转换因子以及纵向值和竖值,计算排水道的虚纵值和虚竖值;
F4:提取虚横值、虚纵值、虚拟转换因子和虚竖值,并将其一同传输至划分判定单元;
云存储单元内还存储有存储信息,存储信息包括浮称数据、浮污数据和面水数据,其中,浮称数据指代漂浮物对应的名称数据以及图像数据,浮污数据指代漂浮物在不同速度的水流中的运行速度,即漂浮物相对于在不同水流中相对于静止不动的物件的移动速度,面水数据指代水面的图像,划分判定单元用于从云存储单元内获取存储信息,并将其与虚横值、虚纵值、虚拟转换因子和虚竖值一同进行划分判定操作,划分判定操作的具体操作过程为:
R1:获取浮称数据和影像数据,并将其进行匹配,当浮称数据内图像数据的与影像数据的匹配结果一致时,则提取图像数据对应的名称数据,当浮称数据内图像数据的与处理影像数据的匹配结果不一致时,则不提取浮称数据内的名称数据;
R2:获取面水数据,并将其与处理影像数据进行匹配,并将其标定为面水影像数据,在虚拟空间直角坐标系中标定为面水影像数据的坐标点,并将其标定为面水坐标点,依据面水坐标点的Z轴值与处理影像数据坐标标记的最大Z轴值进行差值计算,计算出Z轴差值,并将其标定为深度值;
R3:获取处理影像数据并对其进行漂浮物识别,具体为:当在处理影像数据中的面水数据上识别到除面水数据以外的影像时,对其进行坐标点标定,并将该点标定为污浮坐标点,获取两个不同时间点内的污浮坐标点,并依据勾股定理计算出两个污浮坐标点之间的距离,并将其标定为点距值,同时计算两个不同时间点的差值,将其标定为计差值,将点距值和计差值带入到速度计算式中,计算出运动速度;
R4:提取运动速度数据,并将其与浮污数据进行匹配,选取出对应的浮污数据,并依据浮污数据选取出水流速度,将其标定为浮速数据;
R5:提取浮速数据、虚横值、虚纵值、虚拟转换因子和深度值,并对其进行排水计算,具体为:
J1:将虚横值与浮速数据带入到计算式:浮速数据*间值=虚横值,计算出间值,将间值、虚纵值和深度值三者进行乘积计算,计算得到虚体值,其中,虚体值指代在排水沟内水的体积;
J2:将虚体值和虚拟转换因子与排水值一同带入到计算式:虚体值=虚拟转换因子*排水值*时间值,计算出时间值,其中,排水值为预设的每个时间单位的排水量大小;
J3:提取时间值,并将其与安全值进行比对,当时间值小于安全值,则判定能在设定时间内将水排出,生成安全信号,当时间值大于等于安全值时,则判定不能在设定时间内将水排出,生成危险信号,其中,安全值指代预设的安全时间大小;
R6:提取安全信号和危险信号,并将其传输至警报单元;
警报单元接收安全信号和危险信号,并对其进行识别,当识别到安全信号时,将其发送至智能设备,当识别到危险信号时,将其转换为危险警报信号,并将危险警报信号发送至智能设备;
智能设备接收安全信号和危险警报信号,并发出对应的提示,智能设备具体为平板电脑。
本发明在工作时,通过摄像头实时检测城市地区下雨时的道路影像,并生成路影信息,将路影信息传输至识别单元;识别单元从云存储单元内获取道况信息,并将道况信息与路影信息一同进行识别操作,得到处理影像数据、横排数据、纵排数据和深排数据,并将其一同传输至排水分析单元;排水分析单元对处理影像数据、横排数据、纵排数据和深排数据一同进行排水分析操作,得到虚横值、虚纵值、虚拟转换因子和虚竖值,并将其一同传输至划分判定单元;划分判定单元从云存储单元内获取存储信息,并将其与虚横值、虚纵值、虚拟转换因子和虚竖值一同进行划分判定操作,得到安全信号和危险信号,并将其传输至警报单元;警报单元接收安全信号和危险信号,并对其进行识别,当识别到安全信号时,将其发送至智能设备,当识别到危险信号时,将其转换为危险警报信号,并将危险警报信号发送至智能设备;智能设备接收安全信号和危险警报信号,并发出对应的提示。
以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
- 一种基于互联网的区域分片调蓄处理排水系统
- 一种基于合流制管网的区域分片调蓄处理排水系统