能量处置器具及处置系统
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及能量处置器具及处置系统。
背景技术
以往已知有这样的能量处置器具:通过对生物体组织的成为处置的对象的部位(以下记载为对象部位)赋予能量而对该对象部位进行处置(例如参照专利文献1)。
专利文献1所记载的能量处置器具包括通过赋予能量而对对象部位进行处置的末端执行器和支承该末端执行器并且由操作者把持的把手。此外,在该把手的两侧面设有分别接受手术操作者等操作者的变更操作的一对推压按钮。另外,该变更操作是变更对对象部位赋予的能量的输出状态的操作。即,在按下一对推压按钮中的任一者时,对对象部位赋予的能量的输出状态变更。
专利文献1:日本特开2011-189185号公报
发明内容
然而,在专利文献1所记载的能量处置器具中,一对推压按钮利用悬臂要素在接受了变更操作之后(被按下之后)恢复为原本的状态。因此,手术操作者等操作者即使观察推压按钮的状态也无法辨别是进行了变更操作的状态还是未进行变更操作的状态。即,手术操作者等操作者即使观察推压按钮的状态也无法辨别对对象部位赋予的能量的输出状态当前是哪种输出状态。
于是,期望一种能够使手术操作者等操作者容易地辨别当前的能量的输出状态、能够提高便利性的技术。
本发明是鉴于上述情况而完成的,其目的在于,提供一种能够提高便利性的能量处置器具及处置系统。
为了解决上述的问题而达到目的,本发明的能量处置器具包括:末端执行器,其通过赋予能量而对生物体组织进行处置;护套,其沿着长度方向轴线设置;把手,其支承所述护套并且由操作者把持;第1控制杆,其以暴露到所述把手的外部的状态设置,与由操作者变更所述末端执行器的所述能量的输出状态的变更操作相应地进行移动;第2控制杆,其以暴露到所述把手的外部的状态设置,与所述变更操作相应地进行移动;基体构件,其配置在所述把手的内部;以及驱动体,其以能够与所述第1控制杆和所述第2控制杆一同相对于所述基体构件进行移动的方式安装于所述基体构件,与对所述第1控制杆或所述第2控制杆进行的所述变更操作相应地使所述第1控制杆和所述第2控制杆连动。
本发明的能量处置器具包括:末端执行器,其通过赋予能量而对生物体组织进行处置;护套,其沿着长度方向轴线设置;把手,其支承所述护套并且由操作者把持;控制杆,其以暴露到所述把手的外部的状态设置,与由操作者变更所述末端执行器的所述能量的输出状态的变更操作相应地进行移动;基体构件,其配置在所述把手的内部;第2接点,其配置在所述把手的内部,用于产生变更所述能量的输出状态的信号;以及驱动体,其以能够与所述控制杆的移动相应地以与沿着所述长度方向轴线的轴线交叉的轴线为中心地进行旋转的方式安装于所述基体构件,能够将所述第2接点在接触状态和非接触状态之间切换。
本发明的处置系统包括上述的能量处置器具和用于控制所述能量处置器具的动作的控制装置。
采用本发明的能量处置器具及处置系统,起到能够提高便利性这样的效果。
附图说明
图1是表示实施方式1的处置系统的图。
图2是说明能量处置器具的结构的图。
图3是说明能量处置器具的结构的图。
图4是说明能量处置器具的结构的图。
图5是说明能量处置器具的结构的图。
图6是说明能量处置器具的结构的图。
图7是说明第1销和第2销的位置关系的图。
图8是表示基体单元的整体结构的图。
图9是表示基体单元的整体结构的图。
图10是表示第2端子保持部的结构的图。
图11是表示第2端子保持部的结构的图。
图12是表示电路板的图。
图13是用于检测对第1开关~第3开关进行的操作的电路图。
图14是说明第3开关的支承构造的图。
图15是说明第3开关的支承构造的图。
图16是说明第3开关的支承构造的图。
图17是说明第3开关的支承构造的图。
图18是表示能量处置器具的制造方法的流程图。
图19是说明能量处置器具的制造方法的图。
图20是说明能量处置器具的制造方法的图。
图21是说明能量处置器具的制造方法的图。
图22是说明能量处置器具的制造方法的图。
图23是说明实施方式2的第3开关的支承构造的图。
图24是说明实施方式2的第3开关的支承构造的图。
图25是说明实施方式2的第3开关的支承构造的图。
图26是表示实施方式1、2的变形例的图。
图27是表示实施方式1、2的变形例的图。
图28是表示实施方式1、2的变形例的图。
具体实施方式
以下,参照附图说明用于实施本发明的方式(以下是实施方式)。另外,本发明并不被以下说明的实施方式所限定。并且,在附图的记载中,对相同的部分标注相同的附图标记。
(实施方式1)
〔处置系统的概略结构〕
图1是表示本实施方式1的处置系统1的概略结构的图。
处置系统1通过对生物体组织的成为处置的对象的部位(以下记载为对象部位)赋予超声波能量和高频能量而对该对象部位进行处置。另外,利用本实施方式1的处置系统1能够执行的处置是对象部位的凝固(密封)、或者对象部位的切开等这样的处置。此外,也可以是同时进行凝固和切开这样的处置。而且,如图1所示,处置系统1包括能量处置器具2和控制装置3。
〔能量处置器具的结构〕
另外,以下,在说明能量处置器具2的结构的过程中使用相互正交的X轴、Y轴及Z轴的XYZ坐标轴。X轴是与护套10的中心轴线Ax(图1)平行的轴。该中心轴线Ax相当于本发明的长度方向轴线。Y轴是与图1的纸面正交的轴。Z轴是沿着图1的上下方向的轴。此外,以下,将沿着中心轴线Ax的一侧(+X轴侧)记载为顶端侧Ar1,将沿着中心轴线Ax的另一侧(-X轴侧)记载为基端侧Ar2。
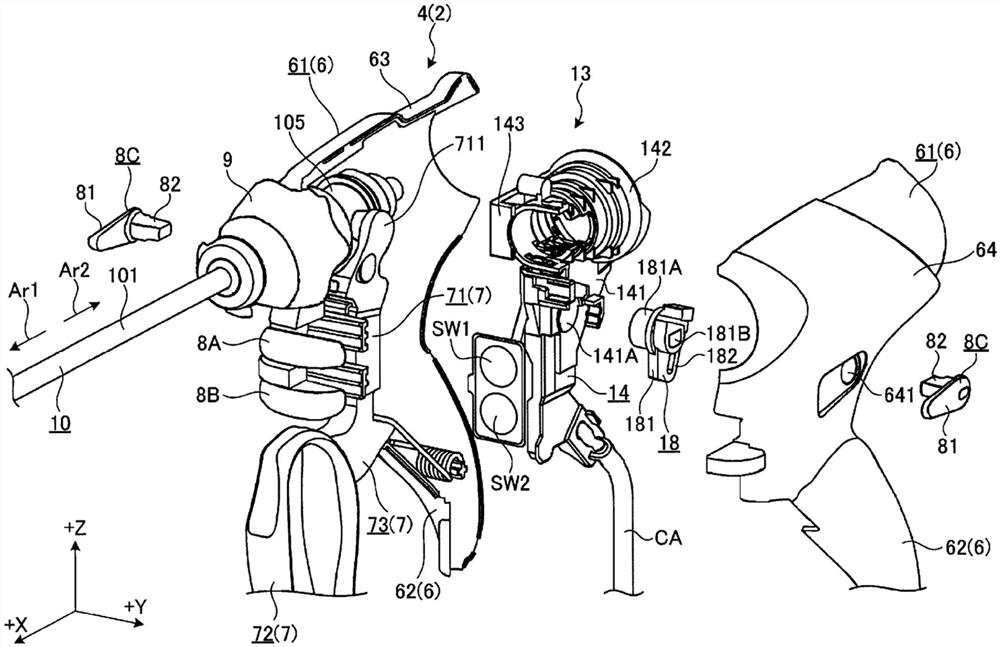
图2~图6是说明能量处置器具2的结构的图。具体而言,图2~图4用包含中心轴线Ax的XZ平面剖切能量处置器具2并且从顶端侧Ar1朝向基端侧Ar2按顺序图示了从+Y轴侧观察到的剖视图的一部分。图5和图6是表示保持壳6的内部的图。另外,在图5中,为了便于说明,省略了超声波转换器5的图示。
能量处置器具2例如是以穿过了腹壁的状态对对象部位进行处置的医疗用处置器具。如图1~图6所示,该能量处置器具2包括手持件4和超声波转换器5(图1、图3、图4、图6)。
如图1~图6所示,手持件4包括保持壳6(图1、图3~图6)、可动手柄7(图1、图3、图5、图6)、第1开关8A(图1、图3、图5、图6)、第2开关8B(图1、图3、图5、图6)、一对第3开关8C(图1、图5)、旋转旋钮9(图1、图3、图5、图6)、护套10(图1~图3、图5、图6)、钳构件11(图1、图2)、超声波探头12(图1~图4、图6)、基体单元13(图3~图6)、以及线缆CA(图1、图5、图6)。
保持壳6相当于本发明的把手。该保持壳6支承能量处置器具2整体。而且,如图5所示,保持壳6包括与中心轴线Ax同轴的大致圆筒状的保持壳主体61和从该保持壳主体61向图5中的下方侧延伸且由手术操作者等操作者把持的固定手柄62。
在本实施方式1中,如图5所示,保持壳6以包含中心轴线Ax的XZ平面为界地分割为两个单体。而且,保持壳6通过组合该两个单体而构成。以下,将该两个单体中的、-Y轴侧的部位记载为第1壳体63(图3~图6),将+Y轴侧的部位记载为第2壳体64(图5)。
可动手柄7分别接受手术操作者等操作者的关闭操作和打开操作。如图5所示,该可动手柄7包括手柄基部71、操作部72以及连接部73。
手柄基部71位于保持壳6的内部。而且,手柄基部71的+Z轴侧的部分以能够相对于保持壳6以与Y轴平行的第1旋转轴线Rx1(图3、图6)为中心地进行旋转的方式轴支承于保持壳6。此外,在手柄基部71的+Z轴侧的端部设有一对卡合部711,该一对卡合部711以分支成两叉的状态朝向+Z轴侧突出,卡合于构成护套10的滑动件105(图5)。
操作部72是分别接受手术操作者等操作者的关闭操作和打开操作的部分,如图5所示位于保持壳6的外部。
如图5所示,连接部73跨过保持壳6的内外地配设,是连接手柄基部71和操作部72的部分。
而且,可动手柄7在接受了手术操作者等操作者的关闭操作的情况下以第1旋转轴线Rx1为中心地在图3中逆时针地进行旋转。即,操作部72向接近固定手柄62的方向进行移动。另一方面,在接受了对可动手柄7进行的打开操作的情况下,该可动手柄7以第1旋转轴线Rx1为中心地在图3中顺时针地进行旋转。即,操作部72向自固定手柄62分开的方向进行移动。
在此,从通过关闭操作使可动手柄7以第1旋转轴线Rx1为中心地在图3中逆时针地旋转了最大限度的状态到通过打开操作使可动手柄7以第1旋转轴线Rx1为中心地在图3中顺时针地旋转了最大限度的状态为止,连接部73的一部分始终位于保持壳6的内部。在此,在关闭操作时,固定手柄62与可动手柄7之间的距离变窄。将连接部73设计为没有此时的固定手柄62与可动手柄7之间的距离比线缆CA的外径小的部分的形状。由此,防止线缆CA被夹入在固定手柄62和可动手柄7之间。
如图5所示,第1开关8A和第2开关8B分别位于第1壳体63和第2壳体64的分割位置,分别以从固定手柄62的顶端侧Ar1的侧面暴露到外部的状态设置。这些第1开关8A和第2开关8B构成为能够在沿着中心轴线Ax的方向上进行移动。
而且,第1开关8A接受手术操作者等操作者的第1能量输出模式的设定操作。
此外,第2开关8B接受手术操作者等操作者的第2能量输出模式的设定操作。在此,第2能量输出模式是与第1能量输出模式不同的能量输出模式。
在此,作为第1能量输出模式的例子,是通过赋予超声波能量和高频能量而进行对象部位的凝固和切开的能量输出模式。而且,第1开关8A是在超声波能量和高频能量的输出开始和输出停止之间切换的开关,相当于本发明的输出开关。此外,作为第2能量输出模式的例子,是通过赋予高频能量而进行对象部位的凝固的能量输出模式。而且,第2开关8B是在高频能量的输出开始和输出停止之间切换的开关,相当于本发明的输出开关。
一对第3开关8C相当于本发明的第1控制杆和第2控制杆。如图5所示,该一对第3开关8C沿着Y轴彼此相对,分别以从该第1壳体63和第2壳体64暴露到外部的状态设置。
而且,一对第3开关8C接受手术操作者等操作者的变更第1能量输出模式和第2能量输出模式中的至少一个能量输出模式的输出状态(对对象部位赋予的能量的输出状态)的变更操作。在此,该能量输出模式的输出状态的变更是在例如以比较高的电压进行驱动的高输出模式和以比该高输出模式低的电压进行驱动的低输出模式之间切换。或者也可以是,能够利用控制装置3任意地设定第3开关8C的切换内容。另外,并不限于与变更操作相应地提高电力(高输出模式)或者与变更操作相应地降低电力(低输出模式)的结构,也可以采用与变更操作相应地变更对对象部位赋予的能量的类别(超声波能量、高频能量)的结构(在对对象部位赋予超声波能量和高频能量这两者的输出状态和对对象部位仅赋予高频能量的输出状态的结构之间切换)。
在此,一对第3开关8C分别由基体单元13轴支承,与手术操作者等操作者的变更操作相应地连动。另外,在后述的“基体单元的结构”中对第3开关8C的构造及由基体单元13支承第3开关8C的支承构造进行说明。
旋转旋钮9具有与中心轴线Ax同轴的大致圆筒形状,如图5所示设于保持壳主体61的顶端侧Ar1。而且,旋转旋钮9接受手术操作者等操作者的旋转操作。通过该旋转操作,旋转旋钮9相对于保持壳主体61以中心轴线Ax为中心地进行旋转。此外,通过旋转旋钮9的旋转,钳构件11和超声波探头12以中心轴线Ax为中心地进行旋转。
护套10整体具有大致圆筒形状。如图1~图3、图5和图6所示,该护套10包括外管101(图1~图3、图5)、内管102(图2、图3)、探头保持件103(图3、图6)、滑动件托架104(图3、图6)、以及滑动件105(图3、图5、图6)。
外管101是由金属等导电性材料构成的圆筒状的管。
另外,超声波探头12以较大的超声波能量进行振动。因此,在振动的超声波探头12与由金属等构成的外管101接触时,有可能对超声波探头12造成损伤。此外,如后所述,由于超声波探头12和外管101成为供高频能量流动的电路径,因此需要设为它们不接触。于是,如图2所示,在该外管101中的、顶端侧Ar1的端部设有与其他的部位相比扩径的扩管部101A,以避免与超声波探头12的接触。
此外,外管101中的、除扩管部101A之外的部位的外周面被电绝缘性的外套管TO(图2、图3)包覆。
在本实施方式1中,扩管部101A的长度(沿着中心轴线Ax的长度)例如设定为5mm~15mm左右。即,通过尽量缩短扩管部101A的长度,减少外管101的暴露部分,并且使外管101不与超声波探头12接触。
此外,在扩管部101A固定有第1销101B,该第1销101B沿着与图1和图2的纸面正交的方向延伸,将钳构件11以能够以第2旋转轴线Rx2(图2)为中心地进行旋转的方式轴支承(图1、图2)。
并且,在扩管部101A中的、+Z轴侧形成有从顶端朝向基端侧Ar2延伸的缺口部101C。
内管102是与外管101相比直径尺寸较小的圆筒状的管。此外,内管102以与外管101同轴的状态贯穿于该外管101内。
如图2所示,在该内管102中的、顶端侧Ar1的端部的+Z轴侧设有朝向顶端侧Ar1突出的臂部102A。在该臂部102A贯穿有第2销111,该第2销111设于钳构件11,以与第2旋转轴线Rx2(第1销101B)平行的状态延伸。
探头保持件103由树脂等具有电绝缘性的材料构成,具有大致圆筒形状。如图3所示,该探头保持件103以跨过旋转旋钮9和保持壳主体61的状态贯穿于该旋转旋钮9和保持壳主体61内。而且,探头保持件103保持贯穿于其内部的超声波探头12。此外,探头保持件103在顶端侧Ar1的端部与旋转旋钮9和外管101机械地连接。即,探头保持件103、外管101、钳构件11及超声波探头12与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地与旋转旋钮9一同以中心轴线Ax为中心地进行旋转。
如图3和图6所示,在该探头保持件103设有HF有源电极端子103A和电路径103B。
HF有源电极端子103A由导电性材料构成,其具有在以中心轴线Ax为中心的周向的整周范围内延伸的环形状。此外,HF有源电极端子103A安装于探头保持件103的基端侧Ar2的外周面。而且,HF有源电极端子103A与设于基体单元13的HF有源电极端子151(图3、图6)电连接。另外,由于HF有源电极端子103A如上所述具有环形状,因此即使在与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地相对于HF有源电极端子151以中心轴线Ax为中心地进行旋转的情况下,HF有源电极端子103A也始终与该HF有源电极端子151电连接。
电路径103B由导电性材料构成,其在探头保持件103的外周面从基端侧Ar2的端部延伸至顶端侧Ar1的端部。而且,如图3所示,电路径103B的基端侧Ar2的端部与HF有源电极端子103A电连接,并且其顶端侧Ar1的端部与外管101电连接。
滑动件托架104由树脂等具有电绝缘性的材料构成,其具有大致圆筒形状。而且,滑动件托架104在其内部贯穿有探头保持件103的状态下以能够相对于该探头保持件103沿着中心轴线Ax进行移动的方式配设。在此,滑动件托架104的顶端侧Ar1的端部以相对于探头保持件103而言在被容许沿着中心轴线Ax的移动的同时被限制了以中心轴线Ax为中心的旋转的状态固定于内管102的基端侧Ar2的端部。即,滑动件托架104和内管102与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地与旋转旋钮9一同以中心轴线Ax为中心地进行旋转。
滑动件105具有大致圆筒形状,在其内部贯穿有滑动件托架104的状态下以能够相对于该滑动件托架104沿着中心轴线Ax进行移动的方式配设。而且,如上所述滑动件105被一对卡合部711卡合于可动手柄7。
而且,滑动件105、滑动件托架104及内管102与手术操作者等操作者对可动手柄7进行的操作相应地如下所示地进行动作。
滑动件105与手术操作者等操作者对可动手柄7进行的关闭操作相应地被一对卡合部711沿着中心轴线Ax向顶端侧Ar1推入。此外,滑动件托架104通过经由配设于其与滑动件105之间的螺旋弹簧106(图3、图6)而从滑动件105朝向顶端侧Ar1承受按压力。并且,内管102与滑动件托架104连动地沿着中心轴线Ax向顶端侧Ar1进行移动。此外,臂部102A将第2销111朝向顶端侧Ar1推入。而且,钳构件11以第2旋转轴线Rx2为中心地在图2中逆时针地进行旋转。此时,由于第2销111也以第2旋转轴线Rx2为中心地以保持一定的距离的状态进行移动,因此臂部102A在向设有缺口部101C的+Z轴侧变形的同时向顶端侧Ar1进行移动。即,钳构件11向接近超声波探头12的顶端侧Ar1的端部121(图2)的方向(闭合的方向)进行移动。
此外,钳构件11与手术操作者等操作者对可动手柄7进行的打开操作相应地以第2旋转轴线Rx2为中心地在图2中顺时针地进行旋转。即,钳构件11向自超声波探头12的顶端侧Ar1的端部121分开的方向(张开的方向)进行移动。
像以上那样,钳构件11与手术操作者等操作者对可动手柄7进行的操作相应地相对于超声波探头12的顶端侧Ar1的端部121进行开闭。
在本实施方式1中,臂部102A的长度(沿着中心轴线Ax的长度)例如设定为5mm~10mm左右。即,通过尽量缩短臂部102A的长度,在该臂部102A随着钳构件11的开闭而变形时避免了该臂部102A与外管101的接触。此外,通过将与中心轴线Ax正交的方向的截面形状设为大致日文片假名コ字形或者宽度较宽的形状而确保臂部102A的强度,从而在该臂部102A随着钳构件11的开闭而变形时避免了该臂部102A与外管101的接触。由此,能够防止钳构件11的开闭力(对象部位的把持力)由于该接触而下降。
此外,在本实施方式1中,臂部102A的外表面与中心轴线Ax之间的分开距离设定为内管102的除臂部102A之外的部位的外周面与中心轴线Ax之间的分开距离以下。由此,在使内管102从外管101的基端贯穿于该外管101内时,臂部102A不会在该外管101的内表面上滑动。即,能够提高内管102对于外管101的组装性。
图7是说明第1销101B和第2销111的位置关系的图。具体而言,图7是沿着与图2的纸面正交的方向观察第1销101B和第2销111的图。另外,在图7中,用实线图示钳构件11张开的状态下的第2销111,用虚线图示钳构件11闭合的状态下的第2销111。
在本实施方式1中,如图7所示,设定为经过第2旋转轴线Rx2的YZ平面BP(图7)在钳构件11张开的状态下的第2销111的位置和钳构件11闭合的状态下的第2销111的位置之间经过。另外,更优选的是,钳构件11张开的状态的第2销111和钳构件11闭合的状态的第2销111设定在以平面BP为基准地对称的位置。由此,将伴随钳构件11的开闭引起的臂部102A的Z轴方向的变形量限定在最小限度,能够将随着内管102沿着中心轴线Ax的移动而产生的力量没有损失地转换为将钳构件11进行开闭的力量(把持对象部位的力量)。
钳构件11的至少一部分由导电性材料构成。而且,钳构件11通过经由外管101和电路径103B而与HF有源电极端子103A电连接。
超声波探头12由导电性材料构成,其具有沿着中心轴线Ax以直线状延伸的纵长形。此外,如图2所示,超声波探头12以顶端侧Ar1的端部121突出到外部的状态贯穿于护套10的内部。此时,如图3和图6所示,超声波探头12的基端侧Ar2的端部与超声波转换器5机械地连接。即,超声波转换器5与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地与超声波探头12一同以中心轴线Ax为中心地进行旋转。而且,超声波探头12将超声波转换器5所产生的超声波振动从基端侧Ar2的端部传递至顶端侧Ar1的端部121。在本实施方式1中,该超声波振动是在沿着中心轴线Ax的方向上进行振动的纵向振动。
另外,超声波探头12的外周面被电绝缘性的内套管TI(图2)包覆,以确保外管101、内管102与该超声波探头12之间的电绝缘性。
线缆CA以装卸自如的方式连接于从控制装置3延伸的电缆C0(图1)。即,线缆CA通过经由电缆C0而与控制装置3电连接。
如图3~图6所示,基体单元13安装有线缆CA并且配设在保持壳6的内部。该基体单元13具有将线缆CA与设于探头保持件103的HF有源电极端子103A和设于超声波转换器5的第1端子52(图4、图6)电连接的功能和支承一对第3开关8C的功能。
另外,在后述的“基体单元的结构”中对线缆CA和基体单元13的详细的结构进行说明。
如图4所示,超声波转换器5包括TD(转换器)壳51、第1端子52以及超声波振子53。
TD壳51支承第1端子52和超声波振子53并且以装卸自如的方式连接于保持壳主体61。如图4所示,该TD壳51包括TD壳主体511和第1端子保持部512。
如图4所示,TD壳主体511具有有底圆筒形状,其以开口部分朝向顶端侧Ar1的姿势连接于保持壳主体61。
在此,在保持壳主体61的内表面中的、基端侧Ar2的部位设有圆筒状的引导面611,该引导面611从基端侧Ar2的端部朝向顶端侧Ar1沿着中心轴线Ax以直线状延伸,具有比TD壳主体511的外径尺寸大一些的内径尺寸(图4、图6)。由此,在超声波转换器5贯穿(连接)于保持壳主体61时,TD壳主体511的外周面被引导面611引导。而且,超声波转换器5的中心轴线与中心轴线Ax一致。此外,无论在将超声波转换器5从哪个角度贯穿于保持壳主体61的情况下,都能够避免该超声波转换器5与设于基体单元13的第2端子保持部142(图6)碰撞。
如图4所示,第1端子保持部512是沿着中心轴线Ax延伸的筒体,其嵌合于TD壳主体511的开口部分。如图3、图4和图6所示,该第1端子保持部512中的、自TD壳主体511向顶端侧Ar1突出的部分的外表面形成为从顶端侧Ar1开始按顺序具有4个台阶512A~512D的阶梯状。这4个台阶512A~512D分别具有以中心轴线Ax为中心的截面圆形状,该4个台阶512A~512D的直径尺寸按照台阶512A~512D的顺序变大。
如图3、图4和图6所示,第1端子52包括HF返回电极端子521、IR端子522、US返回电极端子523以及US有源电极端子524。该各端子521~524分别由导电性材料构成。
HF返回电极端子521在台阶512A上设于该台阶512A的截面圆形状的周向的整周范围内。而且,HF返回电极端子521通过将超声波转换器5连接于保持壳主体61而与设于基体单元13的HF返回电极端子152(图3、图4、图6)电连接。另外,由于HF返回电极端子521如上所述设于台阶512A的截面圆形状的周向的整周范围内,因此即使在与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地相对于HF返回电极端子152以中心轴线Ax为中心地进行旋转的情况下也始终与该HF返回电极端子152电连接。
IR端子522在台阶512B上设于该台阶512B的截面圆形状的周向的整周范围内。而且,IR端子522通过将超声波转换器5连接于保持壳主体61而与设于基体单元13的IR端子153(图3、图4、图6)电连接。另外,由于IR端子522如上所述设于台阶512B的截面圆形状的周向的整周范围内,因此即使在与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地相对于IR端子153以中心轴线Ax为中心地进行旋转的情况下也始终与该IR端子153电连接。此外,虽然省略了具体的图示,但在超声波转换器5中内置有用于存储识别信息的TD(转换器)用存储器,该识别信息用于识别例如该超声波转换器5。而且,IR端子522通过经由设于TD壳51内部的电路径(省略图示)而与该TD用存储器电连接。
US返回电极端子523在台阶512C上设于该台阶512C的截面圆形状的周向的整周范围内。而且,US返回电极端子523通过将超声波转换器5连接于保持壳主体61而与后述的US返回电极端子154(图3、图4、图6)电连接。另外,由于US返回电极端子523如上所述设于台阶512C的截面圆形状的周向的整周范围内,因此即使在与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地相对于US返回电极端子154以中心轴线Ax为中心地进行旋转的情况下也始终与该US返回电极端子154电连接。
US有源电极端子524在台阶512D上设于该台阶512D的截面圆形状的周向的整周范围内。而且,US有源电极端子524通过将超声波转换器5连接于保持壳主体61而与设于基体单元13的US有源电极端子155(图3、图4、图6)电连接。另外,由于US有源电极端子524如上所述设于台阶512D的截面圆形状的周向的整周范围内,因此即使在与手术操作者等操作者对旋转旋钮9进行的旋转操作相应地相对于US有源电极端子155以中心轴线Ax为中心地进行旋转的情况下也始终与该US有源电极端子155电连接。
超声波振子53在控制装置3的控制下产生超声波振动。在本实施方式1中,超声波振子53由BLT(螺栓紧固朗之万型振子)构成。如图4所示,该超声波振子53包括振子主体54、前块55以及后块56。
如图4所示,振子主体54包括第1电极板541和第2电极板542、以及多个(在本实施方式1中是4个)压电元件543。
第1电极板541和第2电极板542是从控制装置3供给驱动信号的部分,该驱动信号是用于产生超声波振动的交流电力。
如图4所示,第1电极板541包括多个(在本实施方式1中是3个)负电极板541A、多个(在本实施方式1中是2个)负电极布线部541B、以及负电极端子541C。
多个负电极板541A分别具有在中央具有开口(省略图示)的圆板形状,其沿着中心轴线Ax并列设置。
多个负电极布线部541B是将彼此相邻的负电极板541A的外缘部相互电连接的部分。
负电极端子541C从多个负电极板541A中的、位于最靠基端侧Ar2的位置的负电极板541A的外缘朝向基端侧Ar2延伸。而且,负电极端子541C通过经由设于TD壳51内部的电路径(省略图示)而与US返回电极端子523电连接。即,第1电极板541与US返回电极端子523电连接。
如图4所示,第2电极板542包括多个(在本实施方式1中是2个)正电极板542A、正电极布线部(省略图示)以及正电极端子(省略图示)。
多个正电极板542A分别具有在中央具有开口(省略图示)的圆板形状,并沿着中心轴线Ax并列设置。另外,正电极板542A具有与负电极板541A大致相同的形状。
而且,如图4所示,负电极板541A和正电极板542A沿着中心轴线Ax交替地配设。此时,多个负电极板541A中的位于最靠基端侧Ar2的位置的负电极板541A配设在比多个正电极板542A中的位于最靠基端侧Ar2的位置的正电极板542A更接近后块56的位置。
正电极布线部(省略图示)是将彼此相邻的正电极板542A的外缘部相互电连接的部分。
正电极端子(省略图示)从多个正电极板542A中的、位于最靠基端侧Ar2的正电极板542A的外缘朝向基端侧Ar2延伸。而且,正电极端子(省略图示)通过经由设于TD壳51内部的电路径(省略图示)而与US有源电极端子524电连接。即,第2电极板542与US有源电极端子524电连接。
多个压电元件543分别具有在中央具有开口(省略图示)的圆板形状,其分别配设在负电极板541A和正电极板542A之间。即,多个压电元件543沿着中心轴线Ax层叠。而且,多个压电元件543通过与供给到第1电极板541和第2电极板542的驱动信号相应地在沿着中心轴线Ax的层叠方向上产生电位差,从而沿着该层叠方向交替地重复膨胀和收缩。由此,超声波振子53产生将该层叠方向作为振动方向的纵向振动的超声波振动。
前块55由导电性材料构成,其具有沿着中心轴线Ax以直线状延伸的纵长形状。如图4所示,该前块55包括元件安装部551、截面积变化部552以及探头安装部553。
元件安装部551是沿着中心轴线Ax以直线状延伸的螺栓,分别贯穿于多个负电极板541A的各开口(省略图示)、多个正电极板542A的各开口(省略图示)、以及多个压电元件543的各开口(省略图示)。而且,如图4所示,在元件安装部551的基端侧Ar2的端部安装有由导电性材料构成的作为螺母的后块56。
截面积变化部552设于元件安装部551的顶端侧Ar1的端部,是用于放大超声波振动的振幅的部分。此外,如图4所示,截面积变化部552具有基端侧Ar2的端部与元件安装部551相比直径尺寸设定得较大、顶端侧Ar1的端部随着朝向顶端侧Ar1而截面积减小的圆锥台形状。即,多个负电极板541A、多个正电极板542A及多个压电元件543通过在元件安装部551沿着中心轴线Ax贯通的状态下被夹持在截面积变化部552和后块56之间而以具有大致圆柱形状的状态一体地紧固连结。另外,在本实施方式1中,在截面积变化部552与多个负电极板541A中的位于最靠顶端侧Ar1的位置的负电极板541A之间以及后块56与多个负电极板541A中的位于最靠基端侧Ar2的位置的负电极板541A之间分别安装有具有电绝缘性的绝缘板544(图4)。
如图4所示,探头安装部553设于截面积变化部552的顶端侧Ar1的端部,其沿着中心轴线Ax以直线状延伸。而且,探头安装部553的顶端侧Ar1的端部通过将超声波转换器5连接于保持壳主体61而与超声波探头12的基端侧Ar2的端部机械连接和电连接。
在此,后块56通过经由设于TD壳51内部的电路径(省略图示)而与HF返回电极端子521电连接。即,超声波探头12通过经由后块56和前块55而与HF返回电极端子521电连接。另外,HF返回电极端子521通过经由设于TD壳51内部的电路径(省略图示)而也与内置于超声波转换器5的TD用存储器(省略图示)电连接。
〔控制装置的结构〕
在控制装置3上,利用电缆C0以装卸自如的方式连接有能量处置器具2。而且,控制装置3通过经由电缆C0而总体地控制能量处置器具2的动作。
具体而言,控制装置3通过经由HF返回电极端子521、IR端子522、基体单元13、线缆CA及电缆C0而与内置于超声波转换器5的TD用存储器电连接。而且,控制装置3获取存储于该TD用存储器的、用于识别例如超声波转换器5的识别信息。
此外,控制装置3通过经由基体单元13、线缆CA及电缆C0而与设于基体单元13的手持件用存储器161(参照图12)电连接。而且,控制装置3获取存储于该手持件用存储器161的、用于识别例如手持件4的识别信息。
并且,控制装置3通过经由基体单元13、线缆CA及电缆C0而与设于基体单元13的、用于检测对第1开关8A进行的第1能量输出模式的设定操作的第1开关元件SW1(图5)电连接。即,控制装置3能够识别是否对第1开关8A进行了第1能量输出模式的设定操作。此外,控制装置3通过经由US返回电极端子523、基体单元13、线缆CA及电缆C0而与第1电极板541电连接,并且通过经由US有源电极端子524、基体单元13、线缆CA及电缆C0而与第2电极板542电连接。并且,控制装置3通过经由外管101、电路径103B、HF有源电极端子103A、基体单元13、线缆CA及电缆C0而与钳构件11电连接,并且通过经由前块55、后块56、HF返回电极端子521、基体单元13、线缆CA及电缆C0而与超声波探头12电连接。
而且,在对第1开关8A进行了第1能量输出模式的设定操作的情况下,控制装置3如下所示地执行第1能量输出模式。
在此,对作为第1能量输出模式使用超声波能量和高频能量进行输出的情况进行说明。即,控制装置3向US返回电极端子523(第1电极板541)和US有源电极端子524(第2电极板542)供给驱动信号。由此,多个压电元件543产生在沿着中心轴线Ax的方向上进行振动的纵向振动(超声波振动)。此外,超声波探头12的顶端侧Ar1的端部121根据该纵向振动以期望的振幅进行振动。而且,从该端部121对在钳构件11和该端部121之间把持的对象部位赋予超声波振动。换言之,从该端部121对对象部位赋予超声波能量。
此外,控制装置3在与对对象部位赋予超声波能量大致同时向HF有源电极端子103A(钳构件11)和HF返回电极端子521(超声波探头12)供给作为高频电力的高频信号。由此,向在钳构件11和超声波探头12的顶端侧Ar1的端部121之间把持的对象部位通入高频电流。换言之,对该对象部位赋予高频能量。
而且,在对象部位中,由于超声波探头12的顶端侧Ar1的端部121的纵向振动而在该端部121和对象部位之间产生摩擦热。此外,通过向对象部位通入高频电流而产生焦耳热。由此,对该对象部位进行凝固(密封)和切开。即,超声波探头12的顶端侧Ar1的端部121和钳构件11相当于本发明的末端执行器。
此外,控制装置3通过经由基体单元13、线缆CA及电缆C0而与设于基体单元13的、用于检测对第2开关8B进行的第2能量输出模式的设定操作的第2开关元件SW2(图5)电连接。即,控制装置3能够识别是否对第2开关8B进行了第2能量输出模式的设定操作。
而且,在对第2开关8B进行了第2能量输出模式的设定操作的情况下,控制装置3如下所示地执行第2能量输出模式。
在此,对作为第2能量输出模式使用高频能量进行输出的情况进行说明。即,控制装置3向HF有源电极端子103A(钳构件11)和HF返回电极端子521(超声波探头12)供给作为高频电力的高频信号。由此,向在钳构件11和超声波探头12的顶端侧Ar1的端部121之间把持的对象部位通入高频电流。
而且,通过向对象部位通入高频电流而产生焦耳热。由此,对该对象部位进行密封。
并且,控制装置3通过经由基体单元13、线缆CA及电缆C0而与设于基体单元13的、用于检测对第3开关8C进行的变更操作的第3开关元件SW3(参照图13、图16、图17)电连接。即,控制装置3能够识别是否对第3开关8C进行了变更操作。
而且,在对第3开关8C进行了变更操作的情况下,控制装置3通过变更驱动信号、高频信号的电力来切换第1能量输出模式和第2能量输出模式中的至少一个能量输出模式的输出状态。
〔基体单元的结构〕
接下来,对基体单元13的结构进行说明。
图8和图9是表示基体单元13的整体结构的图。具体而言,图8是从+Y轴侧观察基体单元13的图。图9是从-Y轴侧观察基体单元13的图。另外,在图8中,为了便于说明,省略了开关支承部18和金属接点19的图示。此外,在图9中,为了便于说明,用点表示树脂RE。图22也相同。
如图8和图9所示,基体单元13包括基体构件14、第2端子15、电路板16(参照图12)、挠性基板17、开关支承部18(图5)、以及安装于该开关支承部18的金属接点19(参照图16)。另外,电路板16和挠性基板17相当于本发明的基板。此外,金属接点19相当于本发明的第1接点。
基体构件14由具有电绝缘性的材料构成,其利用螺孔等多个固定部14A(图8、图9)固定于保持壳6的内部。如图8和图9所示,该基体构件14包括基体构件主体141、第2端子保持部142以及端子按压构件143(图9)。
如图5所示,基体构件主体141形成为平板状,其以各板面与XZ平面平行的姿势配置在保持壳6的内部。此外,基体构件主体141在保持壳6的内部从固定手柄62的-Z轴侧的端部延伸至保持壳主体61。
而且,如图8和图9所示,线缆CA的一端侧的部位利用捆束带CT安装于基体构件主体141中的、-Z轴侧的端部。而且,线缆CA的另一端侧的部位从固定手柄62的-Z轴侧的侧面被引出到固定手柄62的外部。在此,如图8和图9所示,多个固定部14A的一部分固定部14A1设于接近线缆CA的一端侧的部位的安装位置的位置。由此,在拉伸线缆CA的另一端侧的部位的情况下,减小对基体单元13施加的负载。另外,作为线缆CA,也可以是利用连接器在基体单元13上装卸自如的结构。
此外,如图8和图9所示,在基体构件主体141中的、+Z轴侧的部位形成有圆形状的轴承接孔141A,该轴承接孔141A贯通正面和背面,将开关支承部18轴支承为能够以与Y轴平行的第3旋转轴线Rx3(与X轴正交的第3旋转轴线Rx3)为中心地进行旋转。该第3旋转轴线Rx3相当于本发明的“与沿着长度方向轴线的轴线交叉的轴线”。另外,第3旋转轴线Rx3只要与沿着中心轴线Ax的X轴交叉,就不限于与该X轴正交的轴线。
图10和图11是表示第2端子保持部142的结构的图。具体而言,图10是从+Y轴侧观察第2端子保持部142的立体图。图11是从-Y轴侧观察第2端子保持部142和端子按压构件143的分解立体图。
如图10和图11所示,第2端子保持部142是沿着X轴(中心轴线Ax)延伸的筒体,其一体形成于基体构件主体141的+Z轴侧的端部。而且,在将超声波转换器5连接于保持壳主体61时,如图3、图4和图6所示,该超声波转换器5的第1端子保持部512贯穿于第2端子保持部142的内部。
如图10所示,该第2端子保持部142的外表面形成为从顶端侧Ar1开始按顺序具有4个台阶142A~142D的阶梯状。这4个台阶142A~142D分别具有以中心轴线Ax为中心的截面圆形状,该4个台阶142A~142D的直径尺寸按照台阶142A~142D的顺序变大。此外,这4个台阶142A~142D的内径尺寸设定得分别比超声波转换器5的4个台阶512A~512D的外径尺寸大一些。并且,如图10和图11所示,在这4个台阶142A~142D分别形成有分别沿着Z轴贯通的一对开口部142E~142I。
此外,如图10和图11所示,在第2端子保持部142中的、+Y轴侧的侧面形成有缺口部142J,该缺口部142J从顶端侧Ar1的端部朝向基端侧Ar2切削至台阶142B、142C之间的边界。
如图11所示,端子按压构件143是安装于第2端子保持部142的-Y轴侧的外表面的、按压分别安装于4个台阶142A~142D的第2端子15的构件。在本实施方式1中,作为端子按压构件143对于第2端子保持部142的固定构造,采用按扣装配。
如图10和图11所示,第2端子15包括HF有源电极端子151、HF返回电极端子152、IR端子153、US返回电极端子154以及US有源电极端子155。该各端子151~155分别由导电性材料构成。
如图11所示,US有源电极端子155包括端子基部155A和一对板簧部155B,其整体具有大致字母U形状。
端子基部155A具有沿着Z轴延伸的平板形状,是以各板面与Y轴正交的姿势固定于台阶142D的-Y轴侧的外表面的部分。
一对板簧部155B是分别从端子基部155A的两端朝向+Y轴侧延伸的部分,构成为能够以该两端为支点地在Z轴方向上弹性变形。此外,在将端子基部155A固定于台阶142D的状态下,一对板簧部155B的各一部分穿过一对开口部142I暴露到第2端子保持部142的内部。而且,US有源电极端子155(一对板簧部155B)在将超声波转换器5连接于保持壳主体61时通过与该超声波转换器5的US有源电极端子524抵接而与该US有源电极端子524电连接。
在此,线缆CA由US有源电极线缆CA1、US返回电极线缆CA2、HF返回电极线缆CA3、HF有源电极线缆CA4、存储器用线缆CA5以及第1~第3开关用线缆CA6~CA8这8根线缆构成(参照图21)。另外,电缆C0也同样由8根线缆构成。
US有源电极线缆CA1和US返回电极线缆CA2成为通过经由电缆C0而从控制装置3供给的驱动信号的电路径。而且,US有源电极线缆CA1与US有源电极端子155直接电连接(参照图21)。
HF返回电极线缆CA3和HF有源电极线缆CA4成为通过经由电缆C0而从控制装置3供给的高频信号的电路径。
存储器用线缆CA5是控制装置3与内置于超声波转换器5的TD存储器(省略图示)和安装于电路板16的手持件用存储器161(参照图12)之间的通信所使用的电路径。
第1~第3开关用线缆CA6~CA8是分别将电缆C0和第1~第3开关元件SW1~SW3电连接的线缆。
如图10和图11所示,US返回电极端子154包括端子基部154A和一对板簧部154B,其整体具有大致字母U形状。
端子基部154A具有与台阶142C的外径尺寸对应地与端子基部155A相比缩短长度方向上的长度而成的平板形状。而且,端子基部154A以各板面与Y轴正交的姿势固定于台阶142C的-Y轴侧的外表面。
一对板簧部154B是分别从端子基部154A的两端朝向+Y轴侧延伸的部分,构成为能够以该两端为支点地在Z轴方向上弹性变形。这一对板簧部154B分别具有与板簧部155B相同的形状。此外,在将端子基部154A固定于台阶142C的状态下,一对板簧部154B的各一部分穿过一对开口部142H暴露到第2端子保持部142的内部。而且,US返回电极端子154(一对板簧部154B)在将超声波转换器5连接于保持壳主体61时通过与该超声波转换器5的US返回电极端子523抵接而与该US返回电极端子523电连接。
而且,US返回电极线缆CA2与US返回电极端子154直接电连接(参照图21)。
如图10和图11所示,IR端子153包括:IR端子主体153C,其包括端子基部153A和一对板簧部153B,整体具有大致字母U形状(图11);以及突出部153D,其一体形成于IR端子主体153C,自端子基部153A向-Z轴侧突出(图11)。
端子基部153A具有与台阶142B的外径尺寸对应地与端子基部154A相比缩短长度方向上的长度而成的平板形状。而且,端子基部153A以各板面与Y轴正交的姿势固定于台阶142B的-Y轴侧的外表面。
一对板簧部153B是分别从端子基部153A的两端朝向+Y轴侧延伸的部分,构成为能够以该两端为支点地在Z轴方向上弹性变形。这一对板簧部153B分别具有与板簧部155B相同的形状。此外,在将端子基部153A固定于台阶142B的状态下,一对板簧部153B的各一部分穿过一对开口部142G暴露到第2端子保持部142的内部。而且,IR端子153(一对板簧部153B)在将超声波转换器5连接于保持壳主体61时通过与该超声波转换器5的IR端子522抵接而与该IR端子522电连接。
如图10和图11所示,HF返回电极端子152包括:HF返回电极端子主体152C,其包括端子基部152A和一对板簧部152B,整体具有大致字母U形状(图11);以及突出部152D,其一体形成于HF返回电极端子主体152C,自端子基部152A向-Z轴侧突出(图11)。
端子基部152A具有与台阶142A的外径尺寸对应地与端子基部153A相比缩短长度方向上的长度而成的平板形状。而且,端子基部152A以各板面与Y轴正交的姿势固定于台阶142A的-Y轴侧的外表面的基端侧Ar2的部位。
一对板簧部152B是分别从端子基部152A的两端朝向+Y轴侧延伸的部分,构成为能够以该两端为支点地在Z轴方向上弹性变形。这一对板簧部152B分别具有与板簧部155B相同的形状。此外,在将端子基部152A固定于台阶142A的状态下,一对板簧部152B的各一部分穿过一对开口部142F暴露到第2端子保持部142的内部。而且,HF返回电极端子152(一对板簧部152B)在将超声波转换器5连接于保持壳主体61时通过与该超声波转换器5的HF返回电极端子521抵接而与该HF返回电极端子521电连接。
如图10和图11所示,HF有源电极端子151包括端子基部151A和一对板簧部151B,其整体具有大致字母U形状。
端子基部151A具有与端子基部152A相同的形状。而且,端子基部151A以各板面与Y轴正交的姿势固定于台阶142A的-Y轴侧的外表面的顶端侧Ar1的部位。
一对板簧部151B是分别从端子基部151A的两端朝向+Y轴侧延伸的部分,构成为能够以该两端为支点地在Z轴方向上弹性变形。这一对板簧部151B分别具有与板簧部155B相同的形状。此外,在将端子基部151A固定于台阶142A的状态下,一对板簧部151B的各一部分穿过一对开口部142E暴露到第2端子保持部142的内部。而且,HF有源电极端子151(一对板簧部151B)通过与设于探头保持件103的HF有源电极端子103A抵接而与该HF有源电极端子103A电连接。
而且,HF有源电极线缆CA4与HF有源电极端子151直接电连接(参照图21)。
像以上说明的那样,各端子151~155的各板簧部151B、152B、153B、154B、155B全部具有相同的形状。因此,能够将各端子151~155对于各端子103A、521~524的各接触压力全部设定为相同。
图12是表示电路板16的图。具体而言,图12是从-Y轴侧观察基体单元13的电路板16的配设位置的图。
如图12所示,电路板16在基体构件主体141的-Y轴侧的板面上配设在与轴承接孔141A相对的位置。在该电路板16形成有贯通孔16A,该贯通孔16A贯通正面和背面,与轴承接孔141A连通。此外,在电路板16安装有包含第1~第3电布线SL1~SL3(参照图13)的多个电布线、手持件用存储器161(图12)、以及第1~第3二极管162~164(参照图20)。
第1电布线SL1通过经由安装于挠性基板17的第1电布线SL1’而分别与第1~第3开关元件SW1~SW3电连接(参照图13)。
第2电布线SL2分别与第1二极管162和第2二极管163电连接,并且通过经由安装于挠性基板17的第2电布线SL2’而分别与第1开关元件SW1和第2开关元件SW2电连接(参照图13)。
第3电布线SL3与第3二极管164电连接,并且通过经由安装于挠性基板17的第3电布线SL3’而与第3开关SW3电连接(参照图13)。
在此,在电路板16分别连接有第1~第3开关用线缆CA6~CA8。由此,第1~第3电布线SL1~SL3分别与第1~第3开关用线缆CA6~CA8电连接。
在手持件用存储器161存储有用于识别例如手持件4的识别信息。在此,在电路板16分别连接有IR端子153的突出部153D、HF返回电极端子152的突出部152D、存储器用线缆CA5以及HF返回电极线缆CA3。由此,手持件用存储器161通过经由安装于电路板16的一对电布线(省略图示)而分别与作为与控制装置3的通信所使用的信号线发挥功能的存储器用线缆CA5和作为与控制装置3的通信所使用的接地线发挥功能的HF返回电极线缆CA3电连接。此外,手持件用存储器161通过经由该一对电布线而分别与IR端子153和HF返回电极端子152电连接。即,内置于超声波转换器5的TD用存储器(省略图示)与手持件用存储器161同样分别与存储器用线缆CA5和HF返回电极线缆CA3电连接。
挠性基板17连接于电路板16,并分别从连接于该电路板16的位置延伸至第1开关8A和第2开关8B的配设位置以及安装于开关支承部18的金属接点19(参照图16、图17)的配设位置。在该挠性基板17安装有第1~第3电布线SL1’~SL3’以及第1开关元件SW1和第2开关元件SW2。
第1电布线SL1’是中转第1电布线SL1与第1~第3开关元件SW1~SW3的布线(参照图13)。
第2电布线SL2’是中转第2电布线SL2与第1开关元件SW1和第2开关元件SW2的布线(参照图13)。
第3电布线SL3’是中转第3电布线SL3与第3开关元件SW3的布线(参照图13)。
在此,第1电布线SL1’的一部分和第3电布线SL3’的一部分在与金属接点19相对的位置暴露到挠性基板17的外部(图10)。而且,该第1电布线SL1’的一部分、该第3电布线SL3’的一部分、以及金属接点19构成第3开关元件SW3。另外,第1电布线SL1’和第3电布线SL3’相当于本发明的布线图案。
第1开关元件SW1设于与第1开关8A相对的位置(图5),用于检测对该第1开关8A进行的第1能量输出模式的设定操作。
第2开关元件SW2设于与第2开关8B相对的位置(图5),用于检测对该第2开关8B进行的第2能量输出模式的设定操作。
图13是用于检测对第1~第3开关8A~8C进行的操作的电路图。
而且,控制装置3如下所示地识别对第1~第3开关8A~8C进行了的操作。
在对第1开关8A进行了第1能量输出模式的设定操作的情况下,利用第1开关元件SW1将第1电布线SL1’和第2电布线SL2’进行导通。而且,利用第1~第3二极管162~164从第2开关用线缆CA7(第2电布线SL2、SL2’)仅朝向第1开关用线缆CA6(第1电布线SL1、SL1’)通入电流。通过识别该电流的流动,控制装置3识别对第1开关8A进行了第1能量输出模式的设定操作。
在对第2开关8B进行了第2能量输出模式的设定操作的情况下,利用第2开关SW2将第1电布线SL1’和第2电布线SL2’进行导通。而且,利用第1~第3二极管162~164从第1开关用线缆CA6(第1电布线SL1、SL1’)仅朝向第2开关用线缆CA7(第2电布线SL2、SL2’)通入电流。通过识别该电流的流动,控制装置3识别对第2开关8B进行了第2能量输出模式的设定操作。
在对第3开关8C进行了的变更操作的情况下,成为利用第3开关SW3将第1电布线SL1’和第3电布线SL3’进行导通的状态或者非导通的状态。而且,在该导通的状态下,利用第1~第3二极管162~164从第3开关用线缆CA8(第3电布线SL3、SL3’)仅朝向第1开关用线缆CA6(第1电布线SL1、SL1’)通入电流。通过识别该电流的流动,控制装置3识别是否对第3开关8C进行了变更操作。而且,控制装置3在第1电布线SL1’和第3电布线SL3’导通的状态(接触状态)下切换为高输出模式和低输出模式中的一种模式。此外,控制装置3在第1电布线SL1’和第3电布线SL3’不导通的状态(非接触状态)下切换为高输出模式和低输出模式中的另一种模式。即,在接触状态和非接触状态下,对对象部位赋予的能量的输出状态设定为互不相同的输出状态。
图14~图17是说明第3开关8C的支承构造的图。具体而言,图14是从+Y轴侧观察保持壳6的图。图15是从-Y轴侧观察保持壳6的图。图16和图17是从+Y轴侧观察开关支承部18的图。
在此,在说明开关支承部18的结构之前对第3开关8C的构造进行说明。
一对第3开关8C具有相同的形状。而且,如图5和图14~图17所示,第3开关8C包括把手部81和轴部82。
把手部81是接受手术操作者等操作者的变更操作的部分。在本实施方式1中,把手部81具有随着朝向顶端侧Ar1去而变细的尖细形状。
轴部82自把手部81的基端侧Ar2的部位沿着Y轴突出。在本实施方式1中,轴部82具有截面矩形形状。而且,一对第3开关8C中的、+Y轴侧的第3开关8C的轴部82贯穿于贯通第2壳体64的正面和背面的圆孔641(图5),突出到保持壳6的内部。另一方面,-Y轴侧的第3开关8C的轴部82贯穿于贯通第1壳体63的正面和背面的圆孔(省略图示),突出到保持壳6的内部。
开关支承部18相当于本发明的驱动体。该开关支承部18由具有电绝缘性的材料构成,如图5、图16和图17所示,在基体构件主体141的+Y轴侧的板面上配设在与轴承接孔141A相对的位置。而且,开关支承部18包括支承部主体181和弹簧部182。
如图5所示,支承部主体181具备圆柱状的柱状轴181A,该柱状轴181A沿着Y轴延伸,贯穿于轴承接孔141A。该柱状轴181A的外径尺寸设定得比轴承接孔141A的内径尺寸小一些。而且,开关支承部18利用轴承接孔141A轴支承柱状轴181A,能够以第3旋转轴线Rx3为中心地进行旋转。
此外,在柱状轴181A形成有截面矩形状的嵌合孔181B,该嵌合孔181B沿着Y轴贯通,供突出到保持壳6的内部的一对第3开关8C的各轴部82分别嵌合(图5、图16、图17)。即,一对第3开关8C利用轴承接孔141A和柱状轴181A以能够以第3旋转轴线Rx3为中心地进行旋转的方式轴支承在保持壳6的内部的Y轴方向的中心位置。
如图16和图17所示,弹簧部182是自支承部主体181的-Z轴侧的端部向基端侧Ar2突出并且向+Z轴侧弯曲地延伸的部分,构成为能够以该支承部主体181的-Z轴侧的端部为支点地在X轴方向上弹性变形。此外,在弹簧部182中的、+Z轴侧的端部设有朝向基端侧Ar2突出的突部182A。
在此,如图16和图17所示,在基体构件主体141中的、+Y轴侧的板面形成有相对于开关支承部18自基端侧Ar2的位置向+Y轴侧突出的卡合突起144。此外,在卡合突起144中的、顶端侧Ar1的侧面,在Z轴方向上并列设有与弹簧部182的突部182A的形状对应的第1卡合凹部144A和第2卡合凹部144B。
如图16和图17所示,金属接点19安装于开关支承部18的+Z轴侧的端部。而且,金属接点19构成第3开关元件SW3。即,金属接点19通过与暴露到挠性基板17的外部的第1电布线SL1’的一部分和第3电布线SL3’的一部分(图10)分别抵接(成为接触状态)而使该第1电布线SL1’和第3电布线SL3’导通。此外,金属接点19通过自该第1电布线SL1’的一部分和第3电布线SL3’的一部分分开(成为非接触状态)而使该第1电布线SL1’和第3电布线SL3’成为非导通的状态。
而且,在使第3开关8C的顶端侧Ar1的部分向-Z轴侧倒下的情况(参照图14、图15中实线所示的第3开关8C)下,开关支承部18以第3旋转轴线Rx3为中心地在图16中逆时针地进行旋转,成为图16所示的状态(第1状态)。此时,金属接点19自暴露到挠性基板17的外部的第1电布线SL1’的一部分和第3电布线SL3’的一部分分开。即,第1电布线SL1’和第3电布线SL3’成为非导通的状态。
另一方面,在使第3开关8C的顶端侧Ar1的部分向+Z轴侧倒下的情况(参照图14、图15中单点划线所示的第3开关8C)下,开关支承部18以第3旋转轴线Rx3为中心地在图17中顺时针地进行旋转,成为图17所示的状态(第2状态)。此时,金属接点19与暴露到挠性基板17的外部的第1电布线SL1’的一部分和第3电布线SL3’的一部分分别抵接。即,第1电布线SL1’和第3电布线SL3’导通。
在此,在使第3开关8C的顶端侧Ar1的部分向-Z轴侧倒下的情况和使第3开关8C的顶端侧Ar1的部分向+Z轴侧倒下的情况这两种情况下,弹簧部182在X轴方向上弹性变形并在卡合突起144的顶端侧Ar1的侧面上进行滑动。而且,在使第3开关8C的顶端侧Ar1的部分向-Z轴侧倒下的情况(第1状态的情况)下,突部182A卡合于位于+Z轴侧的第1卡合凹部144A(图16)。由此,维持第1状态。此外,在使第3开关8C的顶端侧Ar1的部分向+Z轴侧倒下的情况(第2状态的情况)下,突部182A卡合于位于-Z轴侧的第2卡合凹部144B(图17)。由此,维持第2状态。该弹簧部182与突部182A对于该第1卡合凹部144A和第2卡合凹部144B的卡合相应地对一对第3开关8C赋予振动。通过设为这样的结构,第3开关8C即使在被操作者的手指等无意地触碰的情况下也能够防止错误地切换,而另一方面,即使不施加过度的力也能够简单地进行切换操作。此外,由于一对第3开关8C连动地运动,因此右撇子或左撇子都能够进行操作,通过视觉辨认顶端侧Ar1的部分的位置,能够容易地确认成为了哪种模式。
〔能量处置器具的制造方法〕
接下来,对上述的能量处置器具2的制造方法进行说明。
图18是表示能量处置器具2的制造方法的流程图。图19~图22是说明能量处置器具2的制造方法的图。
另外,进行以下所示的工序S1、S2的场所不同。具体而言,在清洁度(洁净度)比较高的清洁室等场所(以下记载为第2场所)进行工序S2。另一方面,在清洁度(洁净度)比第2场所低的清洁室等场所(以下记载为第1场所)进行工序S1。
以下,按照工序S1、S2的顺序说明工序S1、S2。
〔关于工序S1〕
在工序S1中,作业人员在第1场所如下所示地组装基体单元13。
作业人员如图11所示地将第2端子15安装于基体构件14(工序S1A)。
在工序S1A之后,作业人员如图19和图20所示地利用软钎焊料SO将挠性基板17和各线缆CA3、CA5~CA8分别连接于电路板16(工序S1B)。
在工序S1B之后,作业人员如下所示地将电路板16设定于基体构件14(工序S1C)。
具体而言,作业人员利用捆束带CT将线缆CA固定于基体构件14。此外,作业人员如图21所示地利用软钎焊料SO将各线缆CA4、CA2、CA1分别连接于各端子151、154、155。并且,作业人员利用软钎焊料SO将各端子152、153的各突出部152D、153D分别连接于电路板16。
在工序S1C之后,作业人员如图22所示地利用环氧树脂等树脂RE包覆基体构件主体141的设置有电路板16的一侧的板面(工序S1D)。
〔关于工序S2〕
在工序S2中,作业人员在第2场所如下所示地组装能量处置器具2。
作业人员将在工序S1中组装的基体单元13从+Y轴侧组装于第1壳体63(工序S2A)。
在工序S2A之后,作业人员将旋转旋钮9、护套10、钳构件11及超声波探头12一体化而成的单元从+Y轴侧组装于第1壳体63(工序S2B)。此时,超声波探头12的基端侧Ar2的端部穿过形成于第2端子保持部142的缺口部142J配设在该第2端子保持部142的内部。
在工序S2B之后,作业人员将第2壳体64组装于第1壳体63(工序S2C)。此外,将一对第3开关8C分别组装于第1壳体63和第2壳体64。
像以上那样,在工序S2A~S2C中,将旋转旋钮9、护套10、钳构件11及超声波探头12一体化而成的单元、基体单元13以及第2壳体64全部从相同方向(从+Y轴侧)组装于第1壳体63。
利用以上的工序S1、S2制造能量处置器具2。
根据以上说明的本实施方式1,起到以下的效果。
在本实施方式1的能量处置器具2中,一对第3开关8C与手术操作者等操作者的变更操作相应地设定为第1状态(图14、图15中实线所示的状态)或第2状态(图14、图15中单点划线所示的状态)。此外,一对第3开关8C利用上述的开关支承部18与该变更操作相应地连动。因此,手术操作者等操作者通过确认一对第3开关8C中的任一者是第1状态或者是第2状态,能够辨别能量的输出状态当前是哪种输出状态(是高输出模式或者是低输出模式)。
因而,采用本实施方式1的能量处置器具2,起到能够使手术操作者等操作者容易地辨别当前的能量的输出状态、能够提高便利性这样的效果。
此外,在本实施方式1的能量处置器具2中,第3开关元件SW3由暴露到挠性基板17的外部的第1电布线SL1’的一部分和第3电布线SL3’的一部分(图10)、以及安装于开关支承部18的金属接点19构成。
因此,能够利用简单的构造构成第3开关元件SW3。
此外,在本实施方式1的能量处置器具2中,一对第3开关8C利用轴承接孔141A和柱状轴181A以能够以第3旋转轴线Rx3为中心地进行旋转的方式轴支承在保持壳6的内部的Y轴方向的中心位置。
因此,在采用设为相互连动的结构的一对第3开关8C的情况下,即使在对该一对第3开关8C中的任一个第3开关8C进行了变更操作的情况下,也能够抑制该一对第3开关8C的晃动,从而顺畅地进行变更操作。
此外,在本实施方式1的能量处置器具2中,一对第3开关8C以沿着Y轴彼此相对、从第1壳体63和第2壳体64分别暴露到保持壳6的外部的状态设置。
因此,手术操作者等操作者无论是在用右手把持固定手柄62的情况下、还是在用左手把持固定手柄62的情况下都能够进行变更操作。因而,能够进一步提高便利性。
此外,在本实施方式1的能量处置器具2中,开关支承部18具备具有突部182A的弹簧部182。另一方面,基体构件14包括通过在第1状态(图16所示的状态)下卡合于突部182A来维持该第1状态的第1卡合凹部144A和通过在第2状态(图17所示的状态)下卡合于突部182A来维持该第2状态的第2卡合凹部144B。而且,弹簧部182与突部182A对于该第1卡合凹部144A和第2卡合凹部144B的卡合相应地对一对第3开关8C赋予振动。即,对操作该一对第3开关8C的操作者赋予卡扣感觉。
因此,手术操作者等操作者能够识别将一对第3开关8C设定为第1状态或第2状态。因而,能够进一步提高便利性。
(实施方式2)
接下来,对本实施方式2进行说明。
在以下的说明中,对与上述的实施方式1相同的结构标注相同的附图标记,省略或简化其详细的说明。
图23~图25是说明本实施方式2的第3开关8C的支承构造的图。具体而言,图23是从+Y轴侧观察保持壳6的图。图24是表示保持壳6的内部的图。图25是从+Y轴侧观察开关支承部180的图。
本实施方式2相对于上述的实施方式1而言,一对第3开关8C的支承构造(开关支承部18)有所不同。此外,伴随着该支承构造的变更,第3开关元件SW3的结构也变更。
另外,以下,为了便于说明,将本实施方式2的第3开关记载为第3开关80C(图23、图24)。此外,将本实施方式2的开关支承部18记载为开关支承部180(图24、图25)。并且,将本实施方式2的第3开关元件记载为第3开关元件SW30(图24、图25)。
一对第3开关80C相当于本发明的第1控制杆、第2控制杆以及控制杆。这一对第3开关80C具有相同的形状。而且,第3开关80C相对于在上述的实施方式1中说明的第3开关8C而言,把手部81的形状有所不同。
具体而言,如图23和图24所示,构成该第3开关80C的把手部81沿着与中心轴线Ax大致平行的方向延伸,在沿着Y轴观察的情况下具有大致矩形形状。
开关支承部180相当于本发明的驱动体。而且,开关支承部180具有与在上述的实施方式1中说明的开关支承部18不同的形状。
具体而言,如图24所示,开关支承部180包括支承部主体183和突出部184。
如图24所示,支承部主体183具有沿着Y轴延伸的大致圆柱形状。而且,在支承部主体183设有与在上述的实施方式1中说明的柱状轴181A和嵌合孔181B相同的柱状轴183A和嵌合孔183B。即,开关支承部180与在上述的实施方式1中说明的开关支承部18同样,利用轴承接孔141A(图24)轴支承柱状轴183A,能够以第3旋转轴线Rx3(图24)为中心地进行旋转。此外,一对第3开关80C利用轴承接孔141A和柱状轴183A以能够以第3旋转轴线Rx3为中心地进行旋转的方式轴支承在保持壳6的内部的Y轴方向的中心位置。
如图24和图25所示,突出部184包括从支承部主体183的基端侧Ar2的端部向基端侧Ar2延伸的延伸部184A和自延伸部184A的突端向+Z轴侧突出且突端在从沿着Y轴的方向观察时具有圆弧形状的推动部184B。
第3开关元件SW30安装在挠性基板17(图24、图25)的与推动部184B相对的位置。此外,第3开关元件SW30是具有金属圆顶MD(图24、图25)的开关元件,与对该第3开关元件SW30进行的操作相应地成为第1电布线SL1’和第3电布线SL3’导通的状态(接触状态)或者非导通的状态(非接触状态)。而且,第3开关元件SW30是产生变更能量的输出状态的信号的接点,相当于本发明的第2接点。
即,在手术操作者等操作者利用大拇指使第3开关80C的顶端侧Ar1的部分向-Z轴侧倒下的情况(由手术操作者等操作者进行了变更操作的情况)下,开关支承部180旋转为推动部184B移动到+Z轴侧的状态。此时,推动部184B在使金属圆顶MD弹性变形的同时按下第3开关元件SW30。即,第1电布线SL1’和第3电布线SL3’导通。
另一方面,在手术操作者等操作者使大拇指离开第3开关80C的情况下,利用欲恢复为金属圆顶MD的原本的形状的反作用力使开关支承部180旋转为推动部184B移动到-Z轴侧的状态。因此,由推动部184B按下第3开关元件SW30的按下状态被解除。即,第1电布线SL1’和第3电布线SL3’成为非导通的状态。
而且,控制装置3与上述的实施方式1同样,在第1电布线SL1’和第3电布线SL3’导通的状态下切换为高输出模式和低输出模式中的一种模式。此外,控制装置3在第1电布线SL1’和第3电布线SL3’不导通的状态下切换为高输出模式和低输出模式中的另一种模式。
另外,与对第3开关80C进行的操作相应的能量的输出状态的变更并不限于上述的切换为高输出模式或者低输出模式,也可以与第1开关8A和第2开关8B同样切换为能量的输出开始或者输出停止。并且,也可以如下所示地利用第3开关80C。
在第1开关8A被按下的情况下,控制装置3对对象部位赋予超声波能量和高频能量。此外,在使第3开关80C的顶端侧Ar1的部分向-Z轴侧倒下的状态(按下第3开关元件SW30的状态)下第1开关8A被按下的情况下,控制装置3对对象部位仅赋予超声波能量。即,也可以是,在第1开关8A和第3开关80C同时被按下的情况和仅是第1开关8A被按下的情况下使能量的输出状态不同。
此外,如图23所示,在本实施方式2的保持壳6的外表面的、保持壳主体61与固定手柄62的交界部分设有指托面621,在手术操作者等操作者把持着该固定手柄62时,该指托面621载置大拇指TH。
该指托面621由其法线方向朝向+Z轴侧的曲面构成。而且,第3开关80C和指托面621配置为在大拇指TH载置于指托面621的状态下大拇指TH配置在第3开关80C和指托面621之间。
在采用以上说明的本实施方式2的结构的情况下,也起到与上述的实施方式1相同的效果。
(其他的实施方式)
至此,说明了用于实施本发明的方式,但本发明并不应仅被上述的实施方式1、2所限定。
图26是表示本实施方式1、2的变形例的图。
在上述的实施方式1、2中,也可以替代基体构件14而采用图26所示的基体构件140。
本变形例的基体构件140由MID(Molded Interconnect Device:模制互连装置)构成。即,如图26所示,该基体构件140由在外表面形成有布线WI的树脂成型品构成。
在上述的实施方式1、2中,作为本发明的能量处置器具,是对对象部位赋予超声波能量和高频能量这两者的结构,但并不限于此,也可以是赋予超声波能量、高频能量及热能中的至少一种能量的结构。在此,“对对象部位赋予热能”是指将在加热器等产生的热传导到对象部位。
在上述的实施方式1、2中,作为本发明的基体构件,是除了基体构件主体141之外还包括第2端子保持部142和端子按压构件143的结构,但并不限于此,也可以省略第2端子保持部142和端子按压构件143,仅由基体构件主体141构成。
图27和图28是表示本实施方式1、2的变形例的图。
在上述的实施方式2中,一对第3开关80C和开关支承部180构成为能够与手术操作者等操作者的变更操作相应地以第3旋转轴线Rx3为中心地进行旋转,但并不限于此。
例如图27所示,一对第3开关80C和开关支承部180也可以是这样的结构:通过与手术操作者等操作者的变更操作相应地向箭头Ar3的方向滑动移动而按下第3开关SW30。
此外,例如图28所示,构成为与手术操作者等操作者的变更操作相应地能够使一对第3开关800C向箭头Ar4的方向滑动移动。此外,也可以替代开关支承部180而设置驱动体1800,该驱动体1800在与一对第3开关800C向箭头Ar4的方向的移动相应地被设于该第3开关800C的推动部83按压的情况下能够向箭头Ar5的方向滑动移动。而且,通过驱动体1800滑动移动而按下第3开关SW30。
以上的图27和图28的构造也可以应用于上述的实施方式1。
1、处置系统;2、能量处置器具;3、控制装置;4、手持件;5、超声波转换器;6、保持壳;7、可动手柄;8A、第1开关;8B、第2开关;8C、80C、800C、第3开关;9、旋转旋钮;10、护套;11、钳构件;12、超声波探头;13、基体单元;14、140、基体构件;14A、14A1、固定部;15、第2端子;16、电路板;16A、贯通孔;17、挠性基板;18、180、开关支承部;19、金属接点;51、TD壳;52、第1端子;53、超声波振子;54、振子主体;55、前块;56、后块;61、保持壳主体;62、固定手柄;63、第1壳体;64、第2壳体;71、手柄基部;72、操作部;73、连接部;74、螺旋弹簧;81、把手部;82、轴部;83、推动部;101、外管;101A、扩管部;101B、第1销;101C、缺口部;102、内管;102A、臂部;103、探头保持件;103A、HF有源电极端子;103B、电路径;104、滑动件托架;105、滑动件;106、螺旋弹簧;111、第2销;121、端部;141、基体构件主体;141A、轴承接孔;142、第2端子保持部;142A~142D、台阶;142E~142I、开口部;142J、缺口部;143、端子按压构件;144、卡合突起;144A、第1卡合凹部;144B、第2卡合凹部;151、HF有源电极端子;151A、端子基部;151B、板簧部;152、HF返回电极端子;152A、端子基部;152B、板簧部;152C、HF返回电极端子主体;152D、突出部;153、IR端子;153A、端子基部;153B、板簧部;153C、IR端子主体;153D、突出部;154、US返回电极端子;154A、端子基部;154B、板簧部;155、US有源电极端子;155A、端子基部;155B、板簧部;161、手持件用存储器;162、第1二极管;163、第2二极管;164、第3二极管;181、支承部主体;181A、柱状轴;181B、嵌合孔;182、弹簧部;182A、突部;183、支承部主体;183A、柱状轴;183B、嵌合孔;184、突出部;184A、延伸部;184B、推动部;511、TD壳主体;512、第1端子保持部;512A~512D、台阶;521、HF返回电极端子;522、IR端子;523、US返回电极端子;524、US有源电极端子;541、第1电极板;541A、负电极板;541B、负电极布线部;541C、负电极端子;542、第2电极板;542A、正电极板;543、压电元件;544、绝缘板;551、元件安装部;552、截面积变化部;553、探头安装部;611、引导面;621、指托面;641、圆孔;711、卡合部;1800、驱动体;Ar1、顶端侧;Ar2、基端侧;Ar3~Ar5、箭头;Ax、中心轴线;C0、电缆;CA、线缆;CA1、US有源电极线缆;CA2、US返回电极线缆;CA3、HF返回电极线缆;CA4、HF有源电极线缆;CA5、存储器用线缆;CA6、第1开关用线缆;CA7、第2开关用线缆;CA8、第3开关用线缆;CT、捆束带;MD、金属圆顶;Rx1、第1旋转轴线;Rx2、第2旋转轴线;Rx3、第3旋转轴线;SL1、SL1’、第1电布线;SL2、SL2’、第2电布线;SL3、SL3’、第3电布线;SW1、第1开关元件;SW2、第2开关元件;SW3、SW30、第3开关元件;TH、大拇指;TI、内套管;TO、外套管;WI、布线。
- 能量处置单元、能量处置器具及能量处置系统
- 能量处置系统、能量控制装置以及能量处置器具