一种轨道交通领域的安全驱采系统及驱采方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及轨道交通技术领域,尤其涉及一种轨道交通领域的安全驱采系统及驱采方法。
背景技术
目前国内轨道交通领域的安全驱采系统种类较少,通常是和逻辑运算部分合在一起,没有单独划分出来,限制了系统灵活性,即使单独划分了,自主化程度也不高,有些关键软件也是从国外直接引进。作为信号系统关键设备,国产自主化研发的需求会越来越迫切。由于安全驱采模块较多,对成本较为敏感,综合考虑安全、稳定及成本的安全驱采系统的种类更少,且大多系统反应也较为迟钝,无法满足需求。
发明内容
本发明的目的是为解决上述问题而提供的一种能够保证系统整体的安全性,也能降低成本,且整体不依赖于第三方的通信处理模块CPM,简化了系统设计,大大缩短了系统反应时间,从而使整体系统更加稳定的轨道交通领域的安全驱采系统及驱采方法。
为实现上述目的,本发明的技术方案为:一种轨道交通领域的安全驱采系统,包括通信处理模块CPM,采集模块AM,驱动模块DM,通信处理模块CPM通过冗余双网与外部主控计算机MCC和维护台SDM连接,采集模块AM和驱动模块DM通过电缆与外部继电器连接,通过冗余CAN总线与通信处理模块CPM连接。
优选的,所述通信处理模块CPM开发是基于相异、自检技术,二取二架构,通信处理模块CPM接收主控计算机MCC的命令,并将命令传给驱动模块DM驱动继电器输出,采集模块AM采集的继电器状态发送给主控计算机MCC,主控计算机MCC把系统报警维护信息发送给维护台SDM。
优选的,所述采集模块AM开发基于编码技术,采集模块AM通过电缆与继电器通过双断方式进行连接,周期性采集继电器状态,并把采集的状态数据打包通过冗余的CAN总线发给通信处理模块CPM,并把运行过程中的报警维护信息发给通信处理模块CPM。
优选的,所述驱动模块DM开发是基于相异、自检技术,二取二架构,驱动模块DM通过电缆与继电器通过双断方式进行连接,周期性接收通信处理模块CPM的驱动命令,根据驱动命令驱动继电器输出,并把运行过程中的报警维护信息发给通信处理模块CPM。
一种轨道交通领域的安全驱采系统的驱采方法,包括以下步骤:
步骤301,连接并调试CPM主备管理;
步骤302,CPM通过安全通信协议接收MCC的驱动信息,对信息解析后发送给DM;
步骤303,DM进行自检和从CPM接收驱动命令,并对自检结果和驱动命令进行二取二比较操作;
步骤304,比较通过继续向下执行,否则板卡导向安全侧,不再输出,本周期执行结束;
步骤305,AM通过双断方式采集继电器状态;
步骤306,AM对采集的状态数据进行处理,并把处理后的数据发送给CPM;
步骤307,CPM接收AM发送的数据,解析后进行2取2比较操作;
步骤308,比较通过继续向下执行,否则系统宕机,本周期执行结束;
步骤309,CPM把采集的数据通过安全通信协议发送给MCC;
步骤310,CPM把收集的系统的报警维护信息发送给系统维护台。
优选的,所述步骤S301具体为:
步骤301.1,两个CPM在同一个机笼内,通过机笼背板上的CAN总线进行通信,运行过程中每50ms发送一包心跳帧,心跳帧中包含各自的主备状态和健康状态;
步骤301.2,每个CPM根据双方的主备状态和健康状态进行主备切换管理;
步骤301.3,主备通信的宽恕周期为100ms,如果连续2次没有收到对方的心跳帧,则认为对方已离线,本机进行主备状态切换。
优选的,所述步骤S303具体为:
步骤303.1,CPU-A控制隔离模块上面两个继电器,CPU-B控制隔离模块下面两个继电器,这两组继电器依次动作,两CPU同时回采继电器状态,来检测隔离模块,检测过程中不影响24V电源的输出;
步骤303.2,CPU-A控制输出端口P端MOSFET,CPU-B控制输出端口N端MOSFET,CPU根据驱动命令控制两个MOSFET实现对外双断输出,两CPU同时回采MOSFET状态,来检测输出端口;
步骤303.3,对回采的状态和预期值进行比较得到自检结果,该自检结果以及驱动命令都要进行2oo2比较。
优选的,所述步骤S304还包括步骤S304.1,即比较有不一致的地方,CPU打开隔离模块4个继电器,并打开所有端口的2个MOSFET。
优选的,所述步骤S305具体为:
步骤305.1,AM的CPU-A向端口1的采集电路发送32位测试字,采集电路根据外部继电器驱动电源状态控制测试字的通路,通过采集电路的测试字被CPU接收,组合成带16位校验位的32位回采字;
步骤305.2,AM的CPU-A依次向其他端口发送测试字,并接收回采字。完成所有端口采集后通知CPU-B执行采集操作。
优选的,所述步骤S306具体为:
步骤306.1,两通道的采集操作都完成后,CPU-A和CPU-B分别对收到的回采字进行处理,根据16位校验位和16位数据位进行回采字校验,以此来判断采集电路的健康状态。然后两个CPU对回采字再进行2oo2操作,如果发现某个端口两个CPU的回采字状态不一致,则设置该端口状态为安全侧的值;
步骤306.2,AM处理完回采字后,通过内部安全通信协议发送给CPM。
本发明公开的一种轨道交通领域的安全驱采系统及驱采方法有益效果为: 1、采集模块AM开发基于编码技术,以此来降低硬件设计复杂度,从而降低硬件成本,采集模块AM通过电缆与继电器通过双断方式进行连接,保证了系统安全性。 2、通过软件编码和非编码这两种相结合的技术综合考虑了系统安全性,系统成本和稳定性,做到了既降低了成本又能保证系统安全,大大优于现有系统。 3、采集模块AM开发基于编码技术,以此来降低硬件设计复杂度,从而降低硬件成本,且不依赖于第三方的CPM主备切换方案,简化了系统设计,使系统反应时间做到了最短。 4、特有的AM采集电路和DM多级输出控制电路保证了采驱功能的安全性。
附图说明
图1为本发明一种轨道交通领域的安全驱采系统的软件流程图。
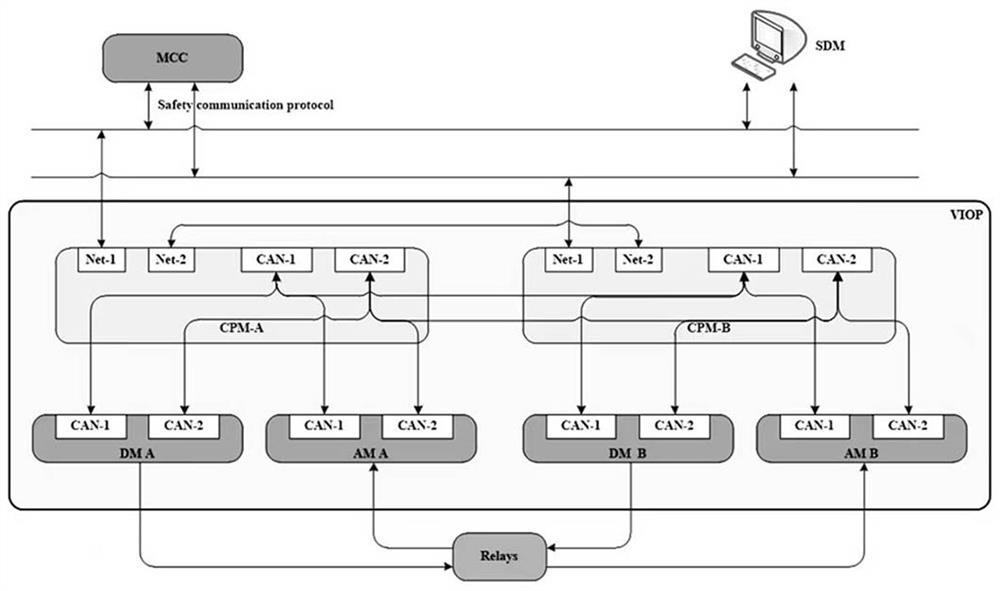
图2为本发明一种轨道交通领域的安全驱采系统的功能框图。
图3为本发明种轨道交通领域的安全驱采系统的驱采方法的流程图。
图4为本发明中DM驱动的电路图。
图5为本发明中AM采集电路图。
具体实施方式
请参照图1-2和图4-5,本发明的技术方案为:一种轨道交通领域的安全驱采系统,,包括通信处理模块CPM,采集模块AM,驱动模块DM,通信处理模块CPM通过冗余双网与外部主控计算机MCC和维护台SDM连接,采集模块AM和驱动模块DM通过电缆与外部继电器连接,通过冗余CAN总线与通信处理模块CPM连接。
在本发明方案中,所述通信处理模块CPM开发是基于相异、自检技术,二取二架构,保证系统安全和运行稳定性,通信处理模块CPM接收主控计算机MCC的命令,并将命令传给驱动模块DM驱动继电器输出,采集模块AM采集的继电器状态发送给主控计算机MCC,主控计算机MCC把系统报警维护信息发送给维护台SDM;采集模块AM和驱动模块DM与继电器间均采用双断连接方式,保证了系统安全性。
在本发明方案中,所述采集模块AM开发基于编码技术,以此来降低硬件设计复杂度,从而降低硬件成本,采集模块AM通过电缆与继电器通过双断方式进行连接,周期性采集继电器状态,并把采集的状态数据打包通过冗余的CAN总线发给通信处理模块CPM,并把运行过程中的报警维护信息发给通信处理模块CPM,通过软件编码和非编码这两种相结合的技术综合考虑了系统安全性,系统成本和稳定性,做到了既降低了成本又能保证系统安全,大大优于现有系统。
其中,编码技术即系统中的状态数据(0或1)是通过符合某种校验算法的32位的码字来表示的。
在本发明方案中,所述驱动模块DM开发是基于相异、自检技术,二取二架构,保证系统安全和运行稳定性,驱动模块DM通过电缆与继电器通过双断方式进行连接,周期性接收通信处理模块CPM的驱动命令,根据驱动命令驱动继电器输出,并把运行过程中的报警维护信息发给通信处理模块CPM,不依赖于第三方的CPM主备切换方案,简化了系统设计,使系统反应时间做到了最短,且具有特有的AM采集电路和DM多级输出控制电路保证了采驱功能的安全性。
请参阅图3,一种轨道交通领域的安全驱采系统的驱采方法,包括以下步骤:
步骤301,连接并调试CPM主备管理;
步骤302,CPM通过安全通信协议接收MCC的驱动信息,对信息解析后发送给DM;
步骤303,DM进行自检和从CPM接收驱动命令,并对自检结果和驱动命令进行二取二比较操作;
步骤304,比较通过继续向下执行,否则板卡导向安全侧,不再输出,本周期执行结束;
步骤305,AM通过双断方式采集继电器状态;
步骤306,AM对采集的状态数据进行处理,并把处理后的数据发送给CPM;
步骤307,CPM接收AM发送的数据,解析后进行2取2比较操作;
步骤308,比较通过继续向下执行,否则系统宕机,本周期执行结束;
步骤309,CPM把采集的数据通过安全通信协议发送给MCC;
步骤310,CPM把收集的系统的报警维护信息发送给系统维护台。
其中,所述步骤S301具体为:
步骤301.1,两个CPM在同一个机笼内,通过机笼背板上的CAN总线进行通信,运行过程中每50ms发送一包心跳帧,心跳帧中包含各自的主备状态和健康状态;
步骤301.2,每个CPM根据双方的主备状态和健康状态进行主备切换管理;
步骤301.3,主备通信的宽恕周期为100ms,如果连续2次没有收到对方的心跳帧,则认为对方已离线,本机进行主备状态切换。
其中,所述步骤S303具体为:
步骤303.1,CPU-A控制隔离模块上面两个继电器,CPU-B控制隔离模块下面两个继电器,这两组继电器依次动作,两CPU同时回采继电器状态,来检测隔离模块,检测过程中不影响24V电源的输出;
步骤303.2,CPU-A控制输出端口P端MOSFET,CPU-B控制输出端口N端MOSFET,CPU根据驱动命令控制两个MOSFET实现对外双断输出,两CPU同时回采MOSFET状态,来检测输出端口;
步骤303.3,对回采的状态和预期值进行比较得到自检结果,该自检结果以及驱动命令都要进行2oo2比较。
其中,所述步骤S304还包括步骤S304.1,即比较有不一致的地方,CPU打开隔离模块4个继电器,并打开所有端口的2个MOSFET,这样的多级输出控制提高了系统安全性。
其中,所述步骤S305具体为:
步骤305.1,AM的CPU-A向端口1的采集电路发送32位测试字,采集电路根据外部继电器驱动电源状态控制测试字的通路,通过采集电路的测试字被CPU接收,组合成带16位校验位的32位回采字;
步骤305.2,AM的CPU-A依次向其他端口发送测试字,并接收回采字。完成所有端口采集后通知CPU-B执行采集操作。
其中,所述步骤S306具体为:
步骤306.1,两通道的采集操作都完成后,CPU-A和CPU-B分别对收到的回采字进行处理,根据16位校验位和16位数据位进行回采字校验,以此来判断采集电路的健康状态。然后两个CPU对回采字再进行2oo2操作,如果发现某个端口两个CPU的回采字状态不一致,则设置该端口状态为安全侧的值;
步骤306.2,AM处理完回采字后,通过内部安全通信协议发送给CPM。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 一种轨道交通领域的安全驱采系统及驱采方法
- 继电器IO驱采模拟方法和系统、驱采测试系统