一种非接触的番茄授粉装置与方法
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及植物授粉方法技术领域,具体涉及一种非接触的番茄授粉装置与方法。
背景技术
在温室中由于缺少昆虫与自然风的授粉,番茄坐果率低,严重影响产量,因此,需要进行人工辅助授粉。常见的番茄辅助授粉方法主要有化学辅助授粉、生物辅助授粉与物理辅助授粉。化学辅助授粉是指通过蘸点、浸泡、喷施激素类药剂等方法来进行番茄辅助授粉。此方法效率低、劳动强度大,且易导致病害、空心果等品质下降问题,甚至可能会导致食品安全问题。
生物辅助授粉是指通过向温室放入可为番茄授粉的蜂类,通过蜂类的访花过程实现辅助授粉。应用此方法存在着成本高、管理难度大,效果不稳定的问题;物理辅助授粉目前主要有两种,一种是采用将已制备的番茄花粉通过设备喷施到番茄花朵上,此方法需要提前制备花粉且易造成番茄花序的损伤。另一种是应用振动机构接触番茄花穗柄的方式,此方法振动机构与番茄花穗柄接触过程中易造成植株的损伤的问题。此外,一些非接触的振动气流授粉方法未考虑花粉释放后的有效授粉引导,授粉效果有待于提高。
发明内容
现有技术中,多使用接触式振动使作物释放花粉来完成辅助授粉。接触式振动获取的花粉常出现植株损伤的现象。为保证植株完好且使番茄花释放数量充足的花粉,在本发明提供的番茄授粉方法中,采用仿生学原理,以脉冲气流带动番茄花穗振动,从而更优地释放花粉,并使用引导气体流将所释放的花粉引导至花朵柱头上完成授粉。
本发明的目的是提供一种非接触的番茄授粉装置与方法,以绿色环保、高效无损的方式完成番茄辅助授粉,避免授粉装置与番茄植株接触造成的损伤,同时提升坐果率,为达到上述目的,本发明提供的技术方案如下。
本发明提供一种非接触的番茄授粉装置与方法,应用非接触的方式完成番茄辅助授粉过程。所述非接触的番茄授粉装置包括脉冲气流生成模块和引导气流生成模块。
脉冲气流生成模块产生脉冲气流,包括真空泵、电机、气流阻挡盘。引导气流生成模块产生向上的引导气流,包括风机、气管、气腔。
该装置进行非接触授粉的方法实现流程主要包括通过产生脉冲气流带动花穗产生仿生振动使花粉释放,在花粉释放后以引导气流吹送花粉至花朵柱头完成授粉。
其中授粉方法实现过程具体地分为两个步骤:
(1)脉冲气流使番茄花粉释放:
选取带有已完全开放花朵的番茄花穗,以脉冲气流作用在花穗柄,花穗振动使花朵释放花粉。其中所述花穗振动使花粉释放具体是指向花朵发出仿生蜜蜂蜂鸣的振动,以振落番茄花药中的花粉。
(2)气流引导完成番茄授粉:
在步骤(1)花粉释放后飘落过程中,以气流引导授粉。其中所述气流引导授粉具体是指吹送空气,将花粉吹送至番茄雌蕊柱头上完成番茄授粉。
在本发明提供的番茄授粉装置中,脉冲气流生成模块主要包括真空泵、电机、气流阻挡盘等关键部件,引导气流生成模块主要包括风机、气管、气腔等关键部件。
在本发明提供的番茄授粉方法中,使花粉释放的非接触脉冲气流的脉冲频率是10~100Hz,脉冲气流最大流速是3~7m/s,脉冲气流出口与番茄花穗的距离为30~80mm。
在本发明提供的番茄授粉方法中,为了确保番茄授粉的成功率,所述引导授粉的气流的气流速度为0.25~3m/s,风量为1×10
由于番茄花粉释放与授粉是对同一花穗进行,因此必须采用精准的控制,才能确保花粉不会掉落,而是按照预定的轨迹转移至需要授粉的雌蕊柱头上。因此,在本发明提供的番茄授粉方法中,所述脉冲气流持续时长是0.2~2s,所述引导气流在脉冲气流开始后0.1~1s,持续时长是0.5~1.5s。
第二方面,本发明提供了上述的番茄授粉方法在番茄种植或提高番茄产量中的应用。以及上述的番茄授粉方法在番茄育种中的应用。
本发明的有益效果是:
(1)本发明提供的番茄非接触授粉装置与方法,通过采用脉冲气流使花穗振动释放花粉,并在诱导花粉释放后花粉飘落过程中采用气流引导的方式完成授粉,具有无需接触番茄花朵与植株的特点,绿色环保,无损高效。
(2)本发明实施例采用仿生的方法实现花朵振动使番茄花粉释放,通过仿生蜜蜂蜂鸣振动对番茄花粉的使释放作用,实现无损伤的番茄花粉使释放。
(3)本发明提供的番茄授粉方法,采用气流引导的方法实现花粉释放后的引导授粉,通过气流的吹送,实现更有效的授粉效果,提升坐果率。
(4)本发明实施例采用每簇番茄花单独授粉的方法,授粉中的花粉来自于每朵番茄花本身,无需提前制备花粉,且可实现精准、高效授粉,并提升坐果率。
(5)本发明提供的番茄授粉装置与方法,解决了现有番茄授粉方法中存在的易造成污染或损伤,坐果率低等问题,具有广阔的市场前景。
附图说明
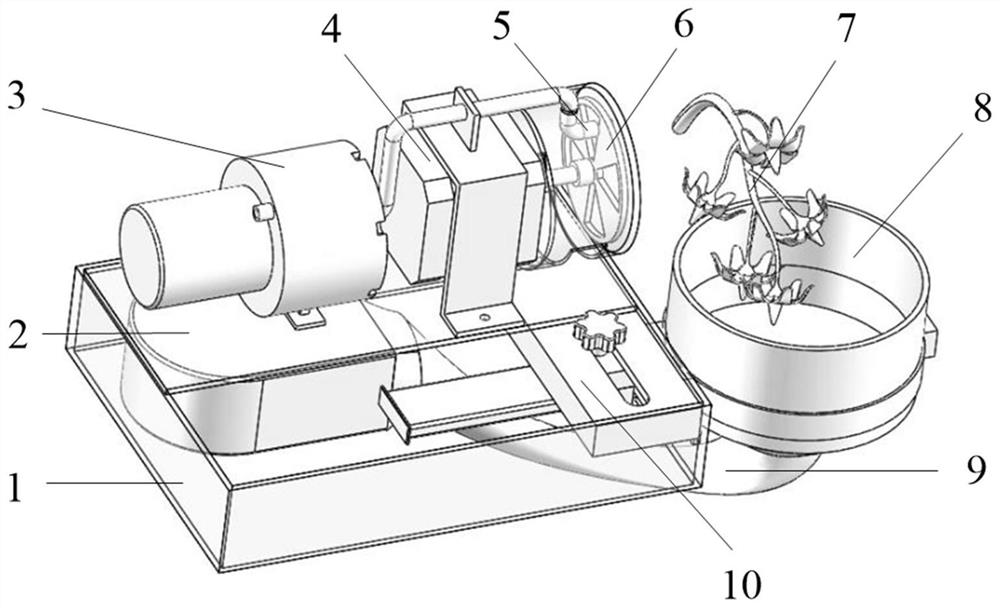
图1为本发明提供的非接触的番茄授粉装置的示意图。图中:1—底架;2—风机;3—真空泵;4—电机;5—脉冲气流出口;6—气流阻挡盘;7—番茄花穗;8—气腔;9—气管;10—位置调节机构。
图2为本发明提供的非接触的番茄授粉方法示意图。图中1—引导气流;2—番茄花粉;3—番茄花;4—脉冲气流;5—番茄花穗柄。
图3为番茄柱头显微图像,图中(a)为无花粉的番茄柱头图像,(b)为有花粉的番茄柱头图像。
图4为实施例2中不同授粉方法下番茄柱头花粉覆盖显微图像,图中(a)为A组、(b)为B组、(c)为C组、(d)为D组。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细地说明。以下实施例将有助于进一步理解本发明的实施方式,但不以任何形式限制本发明。应当指出的是,在不脱离本发明构思的前提下所做出若干关于脉冲振动源与引导气流实现方法及其位置与数量上的改进,这些都属于本发明的保护范围。
参照图1所示,本发明实施例中,提供一种非接触的番茄授粉装置,其主要机械结构与作业方式如下:
图中:1—底架;2—风机;3—真空泵;4—电机;5—脉冲气流出口;6—气流阻挡盘;7—番茄花穗;8—气腔;9—气管;10—位置调节机构。
(1)在操作该装置前,首先持稳底架1,根据番茄花穗的大小等特征调节位置调节机构10,使得气腔8位于番茄花穗7正下方,脉冲气流出口5位于番茄花穗柄位置,开始作业。
(2)作业时,以真空泵3产生高压气流,并由电机4带动气流阻挡盘6的转动从而使由脉冲气流出口5发出的气流具有间歇性,即产生脉冲气流。脉冲气流吹送至番茄花穗7上,带动番茄花穗7产生仿生振动使花朵释放花粉。
(3)花粉释放后,风机2开始作业,产生气流由气管9输送至气腔8,从而产生引导气流完成授粉。
参照图2所示,本发明实施例中,提供一种非接触的番茄授粉方法,其包括以下步骤:
(1)脉冲气流带动花穗振动使花粉释放;选取带有已完全开放的番茄花的花穗,以脉冲气流4作用在番茄花穗柄5上,使花朵振动花粉释放。其中所述脉冲气流带动花穗振动使花粉释放具体是指向花朵发出仿生蜜蜂蜂鸣的脉冲气流4,以释放番茄花药上的花粉。
(2)气流引导授粉;在步骤(1)花粉释放后飘落过程中,以气流引导授粉。其中所述气流引导授粉具体是指可吹送空气的引导气流1,将步骤(1)中释放的花粉2吹送至雌蕊柱头上完成番茄授粉过程。
需要说明的是,所述番茄花穗是选取具有完全开放的番茄花,步骤(1)中使花粉释放与步骤(2)引导授粉的目标花穗为同一簇番茄花。
作为本发明的另一优选实施例,所述振动使花粉释放的脉冲气流4实现方式可以是间断地生成气流或气流出口间隔阻挡等,这里并不作限定。
作为本发明的另一优选实施例,所述气流引导传粉的气流1形式可以是涡流气流、平行气流气流等,这里并不作限定。
本发明的另一目的是提供一种非接触的番茄授粉方法在番茄种植辅助授粉过程中的应用。
作为本发明的另一优选实施例,在所述的番茄种植辅助授粉过程中的应用,所述的番茄可以是具有孔性花药且花药顶端开裂的可进行蜂鸣授粉任一种番茄品种。具体的,可以根据需求选择番茄种植品种,这里不作限定。
以下通过列举实施例对本发明非接触的番茄授粉方法的技术方法与优选参数做进一步说明。
实施例1
本实施例提供的一种非接触番茄授粉方法,示意图见图2,包括以下步骤:
(1)选择带有完全开放番茄花3的番茄花穗作为授粉目标,脉冲气流4作用在番茄花穗柄5处,带动花穗振动使番茄花粉2释放,持续时长是0.2~1s;
使花粉释放的非接触脉冲气流的脉冲频率是10~100Hz,脉冲气流最大流速是3~7m/s;使花粉释放的非接触脉冲气流与番茄花穗的距离为30~80mm。
(2)在步骤(1)后花粉2释放后飘落过程中(引导气流在脉冲气流开始后0.1~0.5s施加),气流1吹送气流将花粉2吹送至雌蕊柱头上,完成番茄非接触辅助授粉;持续时长是0.5~1s。
所述引导授粉的气流的气流速度为0.25~3m/s,风量为1×10
实施例2
本实施在北京市平谷区某番茄种植户,番茄品种为京番305,定植时间2个月。随机选择同一温室中生长状态一致的四行番茄分为A、B、C、D四组分别以不同的授粉方法进行授粉作业。其中A组作为对照组不进行人工授粉,B组采用振动器方法授粉,C组采用鼓风机气吹方法授粉,D组采用实施例1提供的非接触授粉方法授粉。
具体地,D组采用非接触授粉方法授粉,包括以下步骤:
(1)选取带有完全开放的番茄花3的花簇作为授粉目标;
(2)脉冲气流生成的真空泵流量设置为15L/min产生气流,出口管内径5mm;在出口处加装由直流电机带动以300r/min转速旋转的有90°间隔阻挡的气流阻挡片,使气流产生10Hz频率的脉冲气流4;
(3)产生的脉冲气流4出口对准番茄花穗柄处距离花穗柄50mm,开始工作后脉冲气流带动花穗,从而使花穗产生仿生蜜蜂的蜂鸣振动;
(4)引导气流1形式为平行气流、方向为竖直向上,中心对准番茄花穗中心,距离花穗中心50mm,气流流速是4m/s,流量是8×10
(5)按照上述参数设置,首先开始脉冲气流4的作用持续2s,使花穗振动释放花粉2;
(6)脉冲气流4作用后1s开始引导气流1的作用吹送气流,持续1s;
(7)按照上述步骤与时长控制完成操作,振动使花粉释放与气流引导授粉停止,即可完成番茄花穗的授粉作业。
于2022年9月17日,天气晴朗、光照充足的上午9时至11时之间进行A、B、C、D四组的授粉方法实施。为了直观评价授粉方法的效果,以番茄柱头处花粉覆盖率作为授粉量的评价指标。在各组授粉作业完成后,每组选取10朵番茄花采用显微摄影对雌蕊柱头进行图像拍摄,得到的无花粉覆盖和有花粉覆盖的柱头显微图像分别如图3的(a)图与图3的(b)图所示。而后进行图像处理分析白色的花粉区域像素数占柱头区域总像素数的百分比作为花粉覆盖率,各组得到的结果如表1所示。由统计结果可得,本发明非接触授粉方法授粉后番茄柱头上花粉覆盖率较A组无人工授粉、B组振动器授粉、C组鼓风机授粉方法授粉后花粉覆盖率均有明显提升。
部分柱头样本得显微图像如图4所示,图4的(a)-(d)图分别为A、B、C、D组某番茄花样本柱头显微图像。
表1番茄授粉效果数据表
实施例3
本实施在北京市平谷区某番茄种植户,番茄品种为京番305,定植时间2个月。随机选择同一温室中生长状态一致的四行番茄分为A、B、C、D四组分别以不同的授粉方法进行授粉作业。其中A组作为对照组不进行人工授粉,B组采用振动器方法授粉,C组采用鼓风机气吹方法授粉,D组采用非接触授粉方法授粉。
具体地,D组采用非接触授粉方法授粉,包括以下步骤:
(1)选取带有完全开放的番茄花3的花簇作为授粉目标;
(2)脉冲气流生成的真空泵流量设置为10L/min产生气流,出口管内径5mm,在出口处加装由直流电机带动以420r/min转速旋转的有90°间隔阻挡的气流阻挡片,使气流产生14Hz频率的脉冲气流4;
(3)产生的脉冲气流4出口对准番茄花穗柄处距离花穗柄80mm,开始工作后脉冲气流带动花穗,从而使花穗产生仿生蜜蜂的蜂鸣振动;
(4)引导气流1形式为平行气流、方向为竖直向上,中心对准番茄花穗中心,距离花穗中心80mm,气流流速是3m/s,流量是10×10
(5)按照上述参数设置,首先开始脉冲气流4的作用持续1s,使花穗振动释放花粉2;
(6)脉冲气流4作用后0.5s开始引导气流1的作用吹送气流,持续0.5s;
(7)按照上述步骤与时长控制完成操作,振动使花粉释放与气流引导授粉停止,即可完成番茄花穗的授粉作业。
于2022年9月17日,天气晴朗、光照充足的上午9时至11时之间进行A、B、C、D四组的授粉方法实施。为了直观评价授粉方法的效果,以番茄柱头处花粉覆盖率作为授粉量的评价指标。在各组授粉作业完成后,每组选取10朵番茄花采用显微摄影对雌蕊柱头进行图像拍摄,而后进行图像处理分析白色的花粉区域像素数占柱头总像素数的百分比作为花粉覆盖率,各组得到的结果如表2所示。
表2番茄授粉效果数据表
实施例4
本实施在北京市平谷区某番茄种植户,番茄品种为京番305,定植时间2个月。随机选择同一温室中生长状态一致的四行番茄分为A、B、C、D四组分别以不同的授粉方法进行授粉作业。其中A组作为对照组不进行人工授粉,B组采用振动器方法授粉,C组采用鼓风机气吹方法授粉,D组采用非接触授粉方法授粉。
具体地,D组采用非接触授粉方法授粉,包括以下步骤:
(1)选取带有完全开放的番茄花3的花簇作为授粉目标;
(2)脉冲气流生成的真空泵流量设置为12L/min产生气流,出口管内径5mm,在出口处加装由直流电机带动以420r/min转速旋转的有60°间隔阻挡的气流阻挡片,使气流产生21Hz频率的脉冲气流4;
(3)产生的脉冲气流4出口对准番茄花穗柄处距离花穗柄50mm,开始工作后脉冲气流带动花穗,从而使花穗产生仿生蜜蜂的蜂鸣振动;
(4)引导气流1形式为平行气流、方向为竖直向上,中心对准番茄花穗中心,距离花穗中心30mm,气流流速是6m/s,流量是12×10
(5)按照上述参数设置,首先开始脉冲气流4的作用持续1.5s,使花穗振动释放花粉2;
(6)脉冲气流4作用后0.8s开始引导气流1的作用吹送气流,持续1.5s;
(7)按照上述步骤与时长控制完成操作,振动使花粉释放与气流引导授粉停止,即可完成番茄花穗的授粉作业。
于2022年9月17日,天气晴朗、光照充足的上午9时至11时之间进行A、B、C、D四组的授粉方法实施。为了直观评价授粉方法的效果,以番茄柱头处花粉覆盖率作为授粉量的评价指标。在各组授粉作业完成后,每组选取10朵番茄花采用显微摄影对雌蕊柱头进行图像拍摄,而后进行图像处理分析白色的花粉区域像素数占柱头总像素数的百分比作为花粉覆盖率,各组得到的结果如表3所示。
表3番茄授粉效果数据表
对比例1不同脉冲气流频率的授粉效果对比
本对比在北京市平谷区某番茄种植户,番茄品种为京番305,定植时间2个月。随机选择同一温室中生长状态一致的四行番茄分为A、B、C、D四组均采用本发明所述的非接触授粉方法进行授粉。各组番茄授粉试验中的试验参数,除将直流电机转速进行调整使得脉冲气流频率分别为A组5Hz,B组15Hz,C组50Hz,D组200Hz外,其它参数与作业方法、作业条件等均与实施例4中相同。
各组得到的结果如表4所示。
表4番茄授粉效果数据表
上表可见,B、C两组(脉冲气流频率在10-100Hz之间)的番茄授粉效果优于A、D两组。
对比例2不同引导气流速度的授粉效果对比
本对比在北京市平谷区某番茄种植户,番茄品种为京番305,定植时间2个月。随机选择同一温室中生长状态一致的四行番茄分为A、B、C、D四组均采用本发明所述的非接触授粉方法进行授粉。各组番茄授粉试验中的试验参数,除引导气流速度分别为A组0.1m/s,B组0.8m/s,C组2.0m/s,D组5.0m/s外,其它参数与作业方法、作业条件等均与实施例4中相同。
各组得到的结果如表5所示。
表5番茄授粉效果数据表
上表可见,B、C两组(引导气流速度在0.25~3m/s之间)的番茄授粉效果优于A、D两组。
对比例3不同脉冲气流与引导气流的时间间隔授粉效果对比
本对比在北京市平谷区某番茄种植户,番茄品种为京番305,定植时间2个月。随机选择同一温室中生长状态一致的四行番茄分为A、B、C、D四组均采用本发明所述的非接触授粉方法进行授粉。各组番茄授粉试验中的试验参数,除脉冲气流引导气流的时间间隔分别为A组0s,B组0.65s,C组0.85s,D组1.15s外,其它参数与作业方法、作业条件等均与实施例4中相同。
各组得到的结果如表6所示。
表6番茄授粉效果数据表
上表可见,B、C两组(脉冲气流与引导气流时间间隔在0.1~1s之间)的番茄授粉效果优于A、D两组。
对比上述实施例与对比例的番茄授粉效果可知,本发明提供的非接触的番茄授粉方法,通过选择已完全开放的一朵番茄花、将振动源与气流源对准番茄花、振动诱导花粉释放、气流引导授粉等,可以精准优质地实现番茄辅助授粉作业,是绿色无损、操作简便、效率较高的非接触番茄授粉方法。相比于现有方法,具有绿色无害,无需制备花粉,提升授粉效果等优势,具有广阔的市场前景。
虽然,上文中已经用一般性说明及具体实施方案对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
- 一种非接触式柔性电路板制作装置及其操作方法
- 一种非接触式深孔直线度检测装置和方法
- 一种非接触式手势控制方法及装置
- 一种非接触式串番茄自动采摘机械手及采摘方法
- 一种温室番茄震荡授粉装置和方法