信息处理设备、信息处理方法及终端设备
文献发布时间:2023-06-19 18:27:32
技术领域
本公开涉及信息处理设备、信息处理方法和终端设备。
背景技术
传统上,已知有如下配置,当行人开始横穿道路上的期望地点时,该配置向周围的车辆通知存在横穿该地点的行人(例如,参见日本未审查专利申请No.2014-225151(JP2014-225151A))。
发明内容
当使用轮椅横穿道路时,取决于路况,轮椅可能难以行驶。当轮椅横穿道路时,需要使轮椅更容易行驶。
鉴于这种情况而做出的本公开的目的在于提高轮椅的行驶便利性。
根据本公开的实施例的信息处理设备包括控制单元,其确定横穿道路的轮椅的行驶路径。控制单元基于关于道路的路面的起伏的信息确定轮椅的行驶路径。
根据本公开实施例的信息处理方法包括确定横穿道路的轮椅的行驶路径。信息处理方法包括基于关于道路的路面的起伏的信息来确定轮椅的行驶路径。
根据本发明实施例的终端设备安装在横穿道路的轮椅上或由轮椅用户携带。终端设备从信息处理设备获取轮椅的行驶路径,轮椅的行驶路径是由信息处理设备基于关于道路的路面的起伏的信息确定的。
根据本公开实施例的信息处理设备、信息处理方法和终端设备,可以提高轮椅行驶的便利性。
附图说明
下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,在附图中,相同的符号表示相同的元件,并且在附图中:
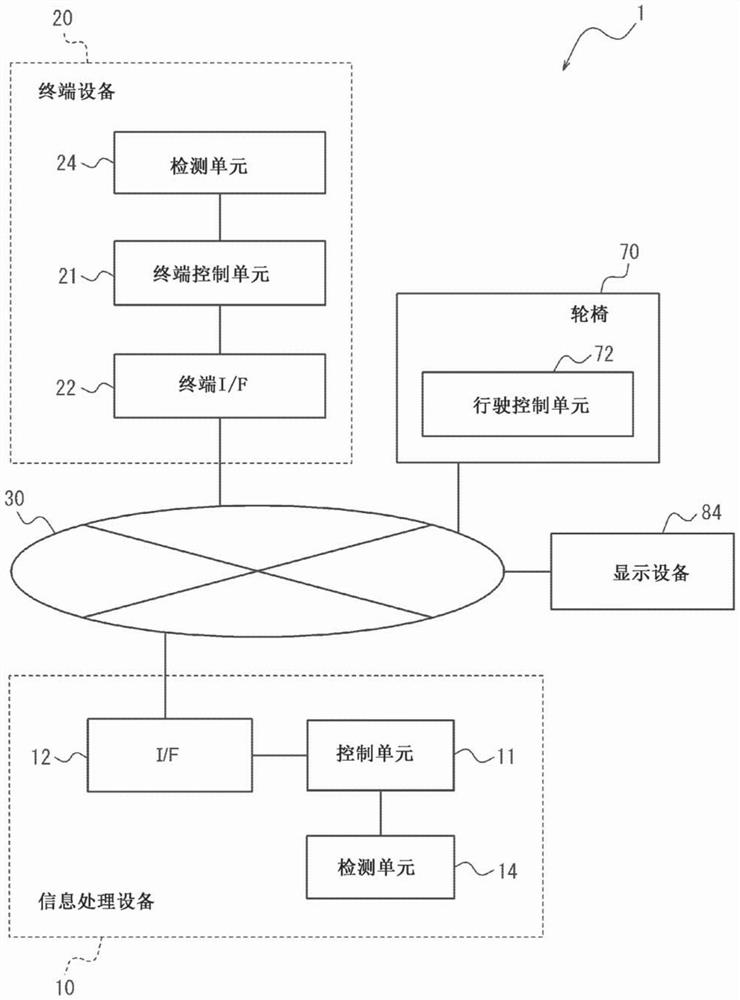
图1是示出根据实施例的信息处理系统的配置示例的框图;
图2是示出基于路面的等高线确定的轮椅的行驶路径的示例的图;
图3是示出基于路面的等高线确定的轮椅的行驶路径的示例和沿着该行驶路径显示的人行横道的示例的图;
图4是示出轮椅的重心位置的示例的主视图;
图5是示出轮椅的重心位置的示例的侧视图;以及
图6是示出根据实施例的信息处理方法的过程示例的流程图。
具体实施方式
信息处理系统1的配置示例
如图1中所示,根据实施例的信息处理系统1包括信息处理设备10和终端设备20。信息处理设备10确定横穿道路40的轮椅70的行驶路径80,如图2和3中所示。信息处理设备10基于关于道路40的路面的起伏的信息来确定轮椅70的行驶路径80。信息处理设备10使用终端设备20向轮椅70或轮椅70的用户74通知所确定的行驶路径80。终端设备20可以安装在轮椅70上。终端设备20可以由用户74携带。终端设备20从信息处理设备10获取轮椅70的行驶路径80,向用户74通知行驶路径80,并控制轮椅70沿行驶路径80行驶。信息处理系统1还包括显示设备84,但不是必须的。显示设备84可以被配置为在道路40上显示轮椅70的行驶路径80。显示设备84可以被配置为在车辆60行驶的道路40上显示人行横道82。在下文中,将描述信息处理系统1的配置示例。
信息处理设备10
信息处理设备10包括控制单元11和服务器接口12。服务器接口12也称为I/F 12。
控制单元11控制信息处理设备10的每个组件。控制单元11可以被配置为包括一个或多个处理器。根据本实施例,“处理器”是通用处理器或专用于特定处理的专用处理器等。然而,处理器不限于此。控制单元11可以被配置为包括一个或多个专用电路。专用电路可以包括例如现场可编程门阵列(FPGA)或专用集成电路(ASIC)。控制单元11可以被配置为包括专用电路来代替处理器,或者可以被配置为包括专用电路连同处理器。
信息处理设备10还可以包括存储单元。存储单元例如是半导体存储器、磁存储器或光存储器。然而,存储单元不限于这些存储器。存储单元可以用作例如主存储设备、辅助存储设备或高速缓存存储器。存储单元可以包括诸如磁盘的电磁存储介质。存储单元存储用于信息处理设备10的操作的任何信息。存储单元可以存储例如系统程序或应用程序等。存储单元可以包括在控制单元11中。
I/F 12输出来自控制单元11的信息或数据等,并向控制单元11输入信息或数据等。I/F 12也简称为接口或I/F。
I/F 12可以包括通信模块,该通信模块被配置为能够经由网络30与显示设备84等进行通信。通信模块可以包括与诸如第四代(4G)或第五代(5G)的移动通信标准相对应的通信模块。然而,通信模块不限于此。I/F 12可以被配置为可连接到通信模块。
信息处理设备10可以包括一个服务器设备或能够相互通信的多个服务器设备。
信息处理设备10还包括检测单元14,但是不是必须的。检测单元14检测关于轮椅70要横穿的道路40的路面的起伏的信息。关于道路40的路面的起伏的信息也称为起伏信息。起伏信息可以包括例如指定道路40的路面上的每个点的高度的信息。起伏信息可以包括指定存在于道路40的路面上的斜坡的信息。起伏信息可以包括表示道路40的路面的等高线的信息。
检测单元14可以被配置为包括例如拍摄道路40的路面的相机。检测单元14可以被配置为包括距离传感器,该距离传感器检测到道路40的路面上每个点的距离。检测单元14可以基于检测到的关于路面的信息计算道路40的路面上的每个点的坐标或高度作为起伏信息。检测单元14可以基于检测到的关于路面的信息来生成指定存在于道路40的路面上的斜坡的信息作为起伏信息。检测单元14可以基于检测到的关于路面的信息来生成表示道路40的路面的等高线的信息作为起伏信息。
检测单元14可以将起伏信息输出到控制单元11。检测单元14可以将检测到的信息输出到控制单元11。控制单元11可以基于由检测单元14检测到的关于路面的信息计算道路40的路面上每个点的坐标或高度作为起伏信息。控制单元11可以基于由检测单元14检测到的关于路面的信息生成指定存在于道路40的路面上的斜坡的信息作为起伏信息。控制单元11可以基于由检测单元14检测到的关于路面的信息,生成表示道路40的路面的等高线的信息作为起伏信息。
终端设备20
如图1中所示,终端设备20包括终端控制单元21和终端接口22。终端接口22也称为终端I/F 22。
终端控制单元21控制终端设备20的每个组件。终端控制单元21可以被配置为与信息处理设备10的控制单元11相同或相似。终端控制单元21可以被配置为包括一个或多个处理器。终端控制单元21可以被配置为包括一个或多个专用电路。专用电路可以包括例如FPGA或ASIC。终端控制单元21可以被配置为包括专用电路来代替处理器,或者可以被配置为包括专用电路连同处理器。
终端设备20还可以包括存储单元。终端设备20的存储单元可以被配置为与信息处理设备10的存储单元相同或相似。存储单元例如是半导体存储器、磁存储器或光存储器。然而,存储单元不限于这些存储器。存储单元可以用作例如主存储设备、辅助存储设备或高速缓存存储器。存储单元可以包括诸如磁盘的电磁存储介质。存储单元存储用于终端设备20的操作的任何信息。存储单元可以存储例如系统程序或应用程序等。存储单元可以包括在终端控制单元21中。
终端I/F 22将从终端控制单元21输出的信息或数据等发送到信息处理设备10。终端I/F 22可以包括被配置为可经由网络30与诸如信息处理设备10的其他设通信的通信模块。通信模块可以包括符合诸如4G或5G的移动通信标准的通信模块。然而,通信模块不限于此。
终端I/F 22可以被配置为包括从用户接收信息或数据等的输入的输入设备。输入设备可以被配置为包括例如触摸面板或触摸传感器或者诸如鼠标的定点设备。输入设备可以被配置为包括物理键。输入设备可以被配置为包括语音输入设备,诸如麦克风。
终端I/F 22可以包括例如向用户输出诸如图像、字符或图形的视觉信息的显示设备。显示设备可以被配置为包括例如液晶显示器(LCD)、有机电致发光(EL)显示器或无机EL显示器或等离子显示面板(PDP)等。显示设备不限于上述的显示器,且可以被配置为包括各种其他类型的显示器。显示设备可以被配置为包括发光元件,诸如发光二极管(LED)或激光二极管(LD)。显示设备可以被配置为包括各种其他设备。
终端设备20还包括检测单元24,该检测单元24检测道路40的路面的起伏信息,但不是必需的。检测单元24可以被配置为与信息处理设备10的检测单元14相同或相似。终端设备20可以将起伏信息输出到信息处理设备10。检测单元24可以检测诸如路面的图像或到路面上的每个点的距离的信息作为用于生成起伏信息的信息,并将该信息输出到信息处理设备10。
终端设备20还可以包括获取终端设备20自身的位置信息的位置信息获取单元。位置信息获取单元可以被配置为包括用于卫星定位系统的接收器。与卫星定位系统兼容的接收器可以包括例如全球定位系统(GPS)接收器。
终端设备20可以安装在轮椅70上或者可以由轮椅70的用户74携带。当终端设备20安装在轮椅70上时,终端设备20可以向用户74通知轮椅70的行驶路径80或可以控制轮椅70的行驶。当终端设备20由用户74携带时,终端设备20可以向用户74通知轮椅70的行驶路径80。
信息处理系统1中包括的终端设备20的数量不限于1个,并且可以是两个或更多个。终端设备20可以被配置为包括诸如智能手机或平板电脑的移动终端,或者诸如膝上型个人计算机(PC)或平板PC的PC。终端设备20不限于上述示例,并且可以被配置为包括各种设备。
显示设备84
显示设备84可以被配置为包括一个或多个处理器。显示设备84可以被配置为包括一个或多个专用电路。显示设备84可以被配置为包括存储单元。显示设备84的存储单元可以被配置为与信息处理设备10的存储单元相同或相似。存储单元存储用于显示设备84的操作的任何信息。存储单元可以存储例如系统程序或应用程序等。
显示设备84可以被配置为包括用于从信息处理设备10获取信息或数据等的接口。该接口可以被配置为与信息处理设备10的I/F 12相同或相似。
显示设备84被配置为包括用于在道路40的路面上显示人行横道82的显示设备。例如,显示设备可以被配置为包括安装成嵌入在道路40的路面中的光源。光源可以被配置为包括例如发光元件,诸如LED或LD。光源可以被配置为包括例如灯泡或荧光灯。例如,显示设备可以被配置为将人行横道82的图像投影到道路40的路面上。
信息处理系统1中包括的显示设备84的数量不限于一个,并且可以是两个或更多个。
当信息处理系统1检测到横穿道路40的轮椅70时,显示设备84可以在道路40上显示人行横道82。当信息处理设备10检测到位于距道路40预定距离内的轮椅70或在距道路40预定距离内停留达预定时间或更长时间的轮椅70时,信息处理设备10可以使显示设备84显示人行横道82,从而轮椅70可以横穿道路40.
信息处理系统1可以包括能够检测轮椅70的存在的诸如相机或运动传感器的传感器,作为用于检测位于距道路40预定距离内的轮椅70的配置。显示设备84可以被配置为通过被安装在道路40附近而能够检测轮椅70的存在。信息处理设备10或显示设备84可以通过下述方式检测位于距道路40预定距离内的轮椅70:从安装在轮椅70上的终端设备20或由轮椅70的用户74携带的终端设备20获取终端设备20的位置信息。
轮椅70
轮椅70可以包括在或不包括在信息处理系统1中。轮椅70包括驱动轮76和脚轮78,如图4和5所示。驱动轮76包括左驱动轮76L和右驱动轮76R。当用户74坐在轮椅70上时,轮椅70和用户74两者的重心位置被表示为重心位置75。
如图1所示,轮椅70还包括行驶控制单元72,尽管不是必需的。轮椅70还可以包括诸如电动机的驱动设备。行驶控制单元72通过控制驱动设备来控制轮椅70等的速度。当轮椅70配备有终端设备20时,或者当轮椅70的用户74携带终端设备20时,行驶控制单元72可以从终端设备20获取用于控制轮椅70行驶的信息,以控制驱动单元。行驶控制单元72可以从信息处理设备10获取用于控制轮椅70的行驶的信息来控制驱动设备。
轮椅70还可以包括检测道路40的路面的起伏信息的传感器。轮椅70的传感器可以将检测到的起伏信息输出到信息处理设备10。轮椅70的传感器可以检测诸如路面的图像或到路面上的每个点的距离的信息作为用于生成起伏信息的信息,并将该信息输出到信息处理设备10。
轮椅70还可以包括获取轮椅70自身的位置信息的位置信息获取单元。位置信息获取单元可以被配置为与终端设备20的位置信息获取单元相同或相似。
信息处理系统1的操作示例
在信息处理系统1中,信息处理设备10例如通过如下所述操作来确定当轮椅70横穿道路40时要行驶的行驶路径80。
轮椅70的检测
信息处理设备10的控制单元11检测横穿道路40的轮椅70。控制单元11可以检测位于距道路40预定距离内的轮椅70或者停留在距道路40预定距离内达预定时间或更多的轮椅70,作为横穿道路40的轮椅70。控制单元11例如可以基于轮椅70自身的位置信息或者安装在轮椅70上的终端设备20或由轮椅70的用户74所携带的终端设备20的位置信息来检测横穿道路40的轮椅70。控制单元11例如可以根据取得的图像来检测横穿道路40的轮椅70。控制单元11可以基于例如通过拍摄道路40和道路40的周围获得的图像来检测横穿道路40的轮椅70。控制单元可以例如基于用于检测道路40上和道路40周围的轮椅70的存在的传感器的检测结果来检测横穿道路40的轮椅70。
起伏信息的获取
控制单元11获取轮椅70周围路面的起伏信息。控制单元11可以获取轮椅70在横穿道路40时可以通过的范围内的路面的起伏信息。控制单元11可以从检测单元14获取起伏信息。控制单元11可以从终端设备20或轮椅70获取起伏信息。
控制单元11可以获取路面的一部分的至少一个点的高度作为起伏信息。控制单元11可以计算基于路面的一部分的至少一个点的高度定义的等高线。例如,在图2和3中,路面的等高线用虚线表示为第一等高线42a和第二等高线42b。第一等高线42a延伸的点的高度可以与第二等高线42b延伸的点的高度相同或不同。第一等高线42a延伸的点的高度可以高于或低于第二等高线42b延伸的点的高度。在本实施例中,第一等高线42a延伸的点的高度低于第二等高线42b延伸的点的高度。
行驶路径80的确定
控制单元11基于路面的起伏信息确定当轮椅70横穿道路40时的行驶路径80。例如,如图2和3所示,控制单元11可以将与被定义为道路40的路面的起伏信息的第一等高线42a和第二等高线42b相交的路径确定为行驶路径80。控制单元11可以将与第一等高线42a和第二等高线42b正交的路径确定为行驶路径80。在具有图2所示的等高线的路面上,控制单元11确定在相对于与道路40正交的方向倾斜的方向上延伸的直线路径作为轮椅70的行驶路径80。在具有图3所示等高线的路面上,控制单元11将与等高线相交的角度为直角或接近直角的角度的弯曲路径确定为轮椅70的行驶路径80。
控制单元11也可以基于轮椅70的重心位置75来确定轮椅70的行驶路径80。具体地,控制单元11可以基于轮椅70的重心在轴向方向上的偏差来确定轮椅70的行驶路径80。轮椅70的轴向方向是沿着连接左驱动轮76L的中心和右驱动轮76R的中心的线的方向。轮椅70的轴向方向对应于图4和图5中的X轴方向。轮椅70的重心在轴向方向的基准位置被设为当与轮椅70的左驱动轮76L接触的路面高度和与右驱动轮76R接触的路面的高度相同时的轮椅70的重心位置75。在图4的示例中,轮椅70的重心在轴向方向的基准位置位于左驱动轮76L和右驱动轮76R的中间。当轮椅70向左右倾斜时,轮椅70的重心从基准位置向X轴的正负方向——即,在轴向方向上——偏移。当轮椅70的重心朝向左驱动轮76L或右驱动轮76R的驱动轮76偏移,或从左右驱动轮76向外偏移时,轮椅70向右或向左摔倒的可能性增加。控制单元11可以确定行驶路径80,使得当轮椅70沿着行驶路径80行驶时,轮椅70的重心位置75在轴向方向上的偏差小于第一阈值。第一阈值例如可以是左驱动轮76L与右驱动轮76R之间的距离的1/4,但不限于此,且可以是各种值。第一阈值可以是左驱动轮76L与右驱动轮76R之间的距离的1/2以下的各种值。
通过确定轮椅70的行驶路径80使得行驶路径80与道路40的路面的等高线相交,减小了轮椅70的左右倾斜。即,轮椅70的重心位置75在轴向方向上的偏差减小。此外,通过基于轮椅70的重心位置75确定轮椅70的行驶路径80,轮椅70的重心位置75在轴向方向上的偏差减小。由于轮椅70的重心位置75在轴向方向上的偏差较小,所以轮椅70的用户74能够在轮椅70在行驶时获得稳定感。结果,提高了轮椅70的行驶的便利性。
控制单元11可以基于轮椅70的重心在行驶方向上的偏差来确定轮椅70的行驶路径80。轮椅70的行驶方向与连接左驱动轮76L的中心和右驱动轮76R的中心的线正交,且是沿着路面的方向。轮椅70的行驶方向对应于图4和5中的Y轴方向。轮椅70的重心在行驶方向上的基准位置被设为当与轮椅70的驱动轮76接触的路面高度和与脚轮78接触的路面高度相同时重心位置75。当轮椅70向前或向后倾斜时,轮椅70的重心在Y轴的正方向或负方向——即,在行驶方向上——偏离基准位置。当轮椅70的重心向驱动轮76的后部或脚轮78的前部偏移时,轮椅70向前或向后摔倒的可能性增加。控制单元11可以确定行驶路径80,使得当轮椅70沿着行驶路径80行驶时,轮椅70的重心位置75在行驶方向上的偏差小于第二阈值。第二阈值例如可以是驱动轮76的中心与脚轮78的中心在Y轴方向上的距离的1/4,但不限于此,并且可以是各种值。第二阈值可以是驱动轮76的中心与脚轮78的中心在Y轴方向上的距离的1/2以下的各种值。
控制单元11可以确定轮椅70的行驶路径80,使得行驶路径80与道路40的路面的等高线相交,并且当轮椅70沿着行驶路径80行驶时轮椅70在前后方向上的倾斜度减小。控制单元11可以确定轮椅70的行驶路径80,使得当轮椅70沿着行驶路径行驶时轮椅70在前后方向上的倾斜度减小,而与行驶路径80与路面等高线之间的角度无关。如此一来,轮椅70的用户74能够在轮椅70在行驶时获得稳定感。结果,提高了轮椅70的行驶的便利性。
控制单元11可以确定行驶路径80,使得包括在轮椅70的行驶路径80中的每个点的高度差小。这样,轮椅70可以容易地行驶。结果,提高了轮椅70的行驶的便利性。
控制单元11可以确定行驶路径80,使得在轮椅70在行驶时包括在行驶路径80中的每个点的高度变化率小。行驶路径80所包括的每个点的高度变化率与沿着轮椅70的行驶方向的路面的坡度相对应。路面的坡度变得越小,轮椅70变得越容易行驶。结果,提高了轮椅70的行驶便利性。
控制单元11可以确定行驶路径80,使得与轮椅70的左驱动轮76L接触的路面高度和与右驱动轮76R接触的路面高度之间的差较小。与轮椅70的左驱动轮76L接触的路面的高度和与右驱动轮76R接触的路面的高度之间的差也称为左右轮之间的高度差。通过减小左右轮之间的高度差,轮椅70的用户74能够在轮椅70在行驶时获得稳定感。结果,提高了轮椅70的行驶的便利性。
控制单元11可以确定行驶路径80,使得左右轮之间的高度差的变化较小。这样,减少了轮椅70在左右方向上的摆动。通过减少左右方向上的摆动,轮椅70的用户74能够在轮椅70在行驶时获得稳定感。结果,提高了轮椅70的行驶的便利性。
行驶路径80的输出
当控制单元11确定轮椅70的行驶路径80时,控制单元11可以将确定的行驶路径80从I/F 12输出到终端设备20或轮椅70。终端设备20或轮椅70可以向用户74通知行驶路径80。用户74可以基于所通知的行驶路径80来操作和移动轮椅70。轮椅70可以基于从信息处理设备10获取的行驶路径80通过行驶控制单元72来沿着行驶路径80行驶。
控制单元11可以在路面上显示确定的行驶路径80。控制单元11可以使显示设备84在路面上显示确定的行驶路径80。控制单元11可以通过来自轮椅70或终端设备20的投影来在路面上显示确定的行驶路径80。
控制单元11可以使终端设备20显示行驶路径80,使得用户74能够识别轮椅70的行驶路径80,或者可以使显示设备84在道路40上显示行驶路径80。
人行横道82的显示
控制单元11可以使显示设备84显示轮椅70要横穿的道路40上的人行横道82。即,控制单元11可以控制显示设备84使得人行横道82显示在车辆60行驶的道路40上。如图2中所示,控制单元11可以使显示设备84在包括轮椅70的行驶路径80的范围内的道路40的路面上显示人行横道82。如图3所示,控制单元11可以使显示设备84沿着轮椅70的行驶路径80显示人行横道82。另外,控制单元11可以改变人行横道82的宽度,使得沿着轮椅70的行驶路径80行驶的轮椅70可以在人行横道82内行驶。
信息处理方法的过程示例
控制单元11可以执行包括图6所示的流程图的过程的信息处理方法。信息处理方法可以实现为由构成控制单元11的处理器执行的信息处理程序。信息处理程序可以存储在非暂时性计算机可读介质中。
控制单元11确定是否存在横穿道路40的轮椅70(步骤S1)。当不存在横穿道路40的轮椅70时(步骤S1:否),控制单元11重复步骤S1的确定过程。当存在横穿道路40的轮椅70时(步骤S1:是),控制单元11获取关于路面的起伏的信息(步骤S2)。
控制单元11基于关于路面的起伏的信息确定当轮椅70横穿道路40时的行驶路径80(步骤S3)。控制单元11输出确定的行驶路径80(步骤S4)。具体地,控制单元11可以将确定的行驶路径80输出到终端设备20或轮椅70。控制单元11可以使显示设备84在路面上显示确定的行驶路径80。在执行步骤S4的过程之后,控制单元11结束图6的流程图。
概括
如上所述,根据本实施例的信息处理系统1和信息处理设备10可以基于关于道路40的路面的起伏的信息来确定横穿道路40的轮椅70的行驶路径80。这样,轮椅70在横穿道路40时变得更容易行驶。结果,提高了轮椅70的行驶的便利性。
其他实施例
信息处理系统1不限于上述模式,并且可以以各种其他模式来实现。在下文中,将描述其他实施例。
根据轮椅70的操作的行驶路径80
当操作轮椅70时,轮椅70的用户74可能用一只手交替地移动左驱动轮76L和右驱动轮76R。在这种情况下,轮椅70的行驶路径80成为细弯曲的路径,即所谓的曲折路径。控制单元11可以根据用户74操作轮椅70的情形确定轮椅70的行驶路径80。例如,控制单元11可以确定轮椅70的行驶路径80,使得用户74交替移动轮椅70的左右驱动轮76以行进。控制单元11可以基于关于路面的起伏的信息考虑是移动左驱动轮76L还是移动右驱动轮76R来确定行驶路径80。这样,用户74能够容易地操作轮椅70。结果,提高了轮椅70的行驶的便利性。
尽管上面已经基于附图和示例描述了根据本公开的实施例,但是应当注意,本领域的技术人员可以基于本公开对其进行各种修改和变更。因此,应当注意,这些修改和改变都在本公开的范围内。例如,可以将各装置或各步骤等中包含的功能重新排列使得在逻辑上不矛盾,也可以将多个装置或步骤等合并为一或分割。
- 信息处理方法、装置、终端设备和可读存储介质
- 一种基于区块链的密码信息处理方法、终端设备
- 一种信息处理方法及终端设备
- 信息处理设备、信息处理方法以及计算机可读记录介质
- 信息处理设备、信息处理方法、程序和医疗观察系统
- 信息处理设备、信息处理方法、信息处理程序、终端设备以及用于控制终端设备的方法和程序
- 信息处理设备、信息处理系统、终端设备和信息处理方法