一种垃圾智能分拣系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及垃圾处理技术领域,更具体的说是涉及一种垃圾智能分拣系统。
背景技术
垃圾分类作为当前各国都在面对的棘手问题,特别是小区生活垃圾因为含水高、厨余和餐饮等有机废物比例大的问题,在回收和再利用环节存在很大难题。尽管近年来大力推行生活垃圾分类收集,但收效甚微。
因此,如何提供一种智能化的垃圾分拣系统是本领域技术人员亟需解决的问题。
发明内容
有鉴于此,本发明提供了一种垃圾智能分拣系统,利用仿生学技术对混合原生垃圾进行多级智能分类处理,将生活垃圾分类处理过程与人类消化系统进行仿生设计,达到对原生垃圾的小型化智能分拣功能。
为了实现上述目的,本发明采用如下技术方案:
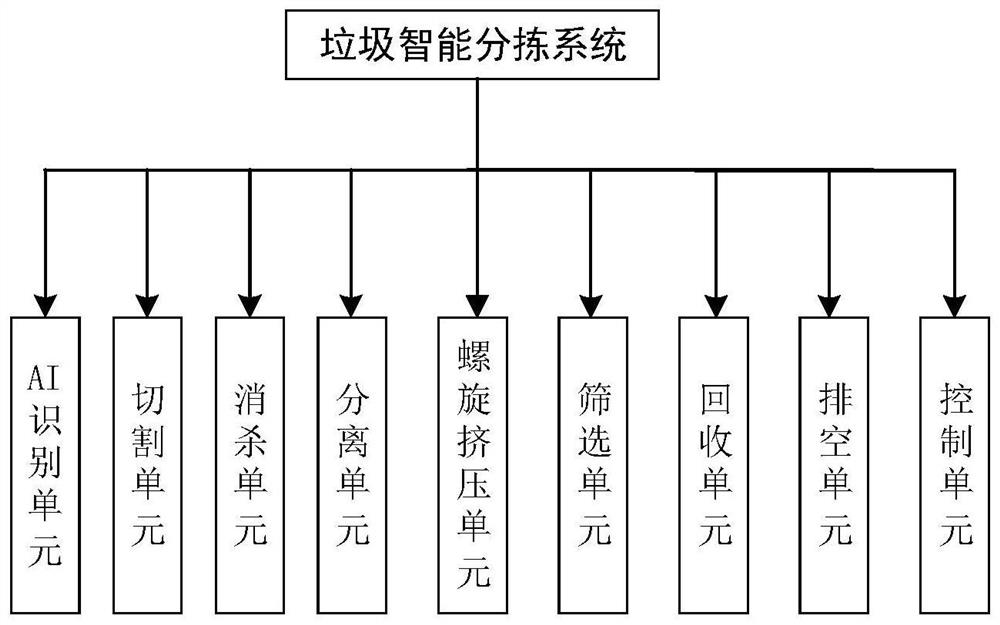
一种垃圾智能分拣系统,包括:AI识别单元、切割单元、消杀单元、分离单元、螺旋挤压单元、筛选单元、回收单元、排空单元和控制单元;
AI识别单元,用于对垃圾的尺寸进行初步识别,当垃圾尺寸不合格时舱门关闭,尺寸合格舱门开启;
切割单元,用于对投入系统后的尺寸合格垃圾进行切割;
消杀单元,用于对切割完成的垃圾进行消杀,避免垃圾回收过程造成病毒传染;
分离单元,用于从消杀后的垃圾中将金属垃圾和轻质垃圾分离至对应的回收单元;
螺旋挤压单元,用于对分离后的剩余垃圾进行螺旋挤压,缩小垃圾体积;
筛选单元,用于通过不同颗粒度的刚筛对螺旋挤压后的垃圾进行分类筛选,将电池、石块和塑料分离至对应的回收单元;
回收单元,用于对筛选后的剩余生活废渣和不可回收物进行回收、生物降解和排放,以及对分离单元、筛选单元和排空单元排放的垃圾进行回收;
排空单元,用于将切割单元、消杀单元、分离单元、螺旋挤压单元和筛选单元中的异常垃圾进行排空,将异常垃圾排放至回收单元;
控制单元,用于控制AI识别单元、切割单元、消杀单元、分离单元、螺旋挤压单元、筛选单元和排空单元。
优选地,切割单元包括压力传感器、切割轮、固定板、液压升降柱、电动推杆和托盘,固定板通过液压升降柱安装在垃圾箱体内部顶板上,压力传感器固定在固定板顶部,固定板底部设置有切割轨道,切割轮设置在切割轨道内,托盘为两个半圆形托盘,每个半圆形托盘两侧分别与电动推杆铰接。
优选地,分离单元包括电磁铁、风扇和固定框,电磁铁和风扇位于固定板相对两侧,风扇固定在垃圾箱体内部一侧面上,电磁铁固定在固定框内,固定框固定在垃圾箱体内部,固定框相对于风扇的一面上开设有通孔,电磁铁用于吸引金属垃圾,将金属垃圾通过通孔吸入固定框内,并通过固定框底部的开口落入对应的回收单元,风扇用于通过通孔将轻质垃圾吹入固定框内,并通过固定框底部的开口落入至对应的回收单元。
优选地,螺旋挤压单元包括主破碎轮、从破碎轮、液压推杆、第一电机、第二电机、连接板、第一固定杆、第二固定杆、第一固定柱和第二固定柱,主破碎轮与第一电机连接,从破碎轮与第二电机连接,主破碎轮和从破碎轮位于同一高度,且均位于第一固定杆和第二固定杆之间,第二电机通过连接板与液压推杆连接,第一固定杆和第二固定杆为中空结构,且对应位置均设置有长度相同的开口,在开口处均设置有滑块和滑轨,滑块设置在滑轨上,滑块内设置有第二轴承,第二轴承套设在第二电机输出轴外表面上,第二电机输出轴通过从破碎轮中心,且第二电机输出轴两端分别与第一固定杆和第二固定杆内的滑块连接;第一固定杆和第二固定杆分别对应固定在第一固定柱和第二固定柱上,第一固定柱固定在垃圾箱体内部一侧面上,与风扇位于同一侧,第二固定柱固定在固定框上,且第一固定柱和第二固定柱相对设置。
优选地,筛选单元包括第一钢筛、第二钢筛和第三钢筛,第一钢筛、第二钢筛、第三钢筛均倾斜设置,倾斜方向一致且向固定框方向倾斜,第一钢筛、第二钢筛和第三钢筛的两端通过弹簧固定在第一固定柱和第二固定柱上。
优选地,AI识别单元包括摄像头、垃圾箱体和舱门,摄像头安装在垃圾箱体正面顶部,舱门位于摄像头下部。
优选地,第一钢筛、第二钢筛和第三钢筛设置有不同的孔径,且第一钢筛、第二钢筛和第三钢筛底部设置有震动器。
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种垃圾智能分拣系统,利用仿生学技术对混合原生垃圾进行多级智能分类处理,将生活垃圾分类处理过程与人类消化系统进行仿生设计,达到对原生垃圾的小型化智能分拣功能,提高了分拣效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
图1附图为本发明提供的一种垃圾智能分拣系统原理示意图。
图2附图为本发明提供的一种垃圾智能分拣系统立体结构图。
图3附图为本发明提供的一种垃圾智能分拣系统内部结构图。
图4附图为本发明提供的一种垃圾智能分拣系统仰视立体图。
图5附图为本发明提供的第一固定杆内部结构图。
图6附图为本发明提供的第一固定杆外部示意图。
图7附图为本发明提供的垃圾智能分拣系统流程图。
其中,1、摄像头,2、垃圾箱体,3、舱门,4、压力传感器,5、切割轮,6、固定板,7、液压升降柱,8、电动推杆,9、托盘,10、切割轨道,11、风扇,12、固定框,13、通孔,14、主破碎轮,15、从破碎轮,16、第一固定杆,17、第二固定杆,18、第一固定柱,19、第二固定柱,20、第一钢筛,21、第二钢筛,22、第三钢筛,23、不可回收垃圾桶,24、可回收垃圾桶,25、第一电机,26、第二电机,27、液压推杆,28、连接板,29、开口,30、滑块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例公开了一种垃圾智能分拣系统,如图1所示,该发明通过仿生学知识,根据生活垃圾尺寸,小型化垃圾处理设备,依据人类消化器官对垃圾回收机器分为以下几个单元:AI识别单元、切割单元、消杀单元、分离单元、螺旋挤压单元、筛选单元、回收单元、排空单元和控制单元;
AI识别单元,类似于人的眼睛用于对垃圾的尺寸进行初步识别,当垃圾尺寸不合格时舱门关闭,尺寸合格舱门开启;
切割单元,类似于人类的牙齿,用于对投入系统后的尺寸合格垃圾进行挤压切割;
消杀单元,类似免疫系统,通过喷淋消毒液和紫外扫描对切割完成的垃圾进行消杀,实现对垃圾中的细菌和病毒等有害物质进行处理,避免垃圾回收过程造成病毒传染;
分离单元,用于从消杀后的垃圾中将金属垃圾和轻质垃圾分离至对应的回收单元;
螺旋挤压单元,类似于人类的胃和小肠,用于对分离后的剩余垃圾进行螺旋挤压,缩小垃圾体积,例如对易碎物的块状物(如餐厨、玻璃瓶等)或者是易拉罐等非铁质壳体进行压缩处理;
筛选单元,类似于人类的大肠,用于通过不同颗粒度的刚筛对螺旋挤压后的垃圾进行分类筛选,将电池、石块和塑料分离至对应的回收单元;
回收单元,用于对筛选后的剩余生活废渣和不可回收物进行回收和排放,例如污水,以及对分离单元、筛选单元和排空单元排放的垃圾进行回收;
排空单元,用于将AI识别单元、切割单元、消杀单元、分离单元、螺旋挤压单元和筛选单元中的异常垃圾进行排空,将异常垃圾排放至回收单元;排空操作为系统的自我保护单位,遇到不能处理的异常垃圾(异常铁制物或者是砖块等时),后期所有操作直接排空,将垃圾放置于回收单元,然后报警处理;
控制单元,用于控制AI识别单元、切割单元、消杀单元、分离单元、螺旋挤压单元、筛选单元和排空单元。
进一步,如图3所示,回收单元包括可回收垃圾桶24和不可回收垃圾桶23,分离单元和筛选单元将分离和筛选出来的垃圾排放至可回收垃圾桶24,将筛选后剩余生活废渣和不可回收物和排空单元排放的垃圾排放至不可回收垃圾桶23内。
进一步,如图2所示,AI识别单元包括摄像头1、垃圾箱体2和舱门3,摄像头1安装在垃圾箱体2正面顶部,舱门3位于摄像头1下部,类似于人的眼睛和嘴对垃圾入舱门检查,通过摄像头1并通过机器识别算法(如垃圾分类AI分类算法)实现对垃圾容量和垃圾有害属性的初步分辨,识别判断尺寸不合适,提示进行人工拆分到合适尺寸,控制器控制舱门3不做开启,尺寸合格时舱门3开启。具体的,舱门采用圆形螺旋门,包括光圈组件,光圈组件包括光圈、连杆和驱动轮,控制器通过控制驱动轮的旋转来带动光圈的开合,根据垃圾尺寸的大小通过电机控制机械光圈实现对回收舱门开合尺寸大小的控制,避免对设备操作损坏。
进一步,如图3、图4所示,切割单元包括压力传感器4、切割轮5、固定板6、液压升降柱7、电动推杆8、托盘9,固定板6通过液压升降柱7安装在垃圾箱体2内部顶板上,压力传感器4固定在固定板6顶部,固定板6底部设置有切割轨道10,切割轮5设置在切割轨道10内,托盘9为两个半圆形托盘,每个半圆形托盘两侧分别与电动推杆8铰接,电动推杆8另一端与第一固定柱或第二固定柱铰接,在垃圾通过AI识别单元后,垃圾落在托盘上,此时电动推杆8处于伸长状态,两个半圆形托盘9正好闭合将垃圾托住。当垃圾落到托盘9上后,液压升降柱7移动,带动固定板6向下运动,当固定板和托盘挤压垃圾后,压力传感器4用于通过固定板和托盘之间的挤压力判断是否对垃圾进行切割,例如,设置为压力值等于5公斤时进行切割,切割轮进行旋转挤压切割,否则,切割轮不运作。切割轮采用钢制切割片进行旋转挤压切割,保证切割包装过程的充分性。当垃圾切割完成后,电动推杆8伸缩,两个半圆形托盘9分开,垃圾落入螺旋挤压单元。
本发明切割单元考虑到编织袋等切割难度大的包装需要切割的情况,将电热切割改为压力切割。
进一步,如图3、图4所示,分离单元包括电磁铁和风扇11,电磁铁和风扇11位于固定板6相对两侧,风扇11固定在垃圾箱体2内部一侧面上,电磁铁固定在固定框12内,固定框12固定在垃圾箱体2内部,固定框12相对于风扇的一面上开设有通孔13,电磁铁用于吸引金属垃圾,将金属垃圾通过通孔吸入固定框,通过固定框12底部的开口落入可回收垃圾桶24,风扇用于通过风力将质量轻的轻质垃圾通过通孔吹入固定框12,通过固定框12底部的开口落入可回收垃圾桶24。
本发明切割完成后启动消杀单元进行消杀,消杀完成后启动分离单元,将含有铁、镍、钴等原料的金属物质和轻质纸张、塑料桶进行回收,断电后落入对应的可回收垃圾桶中。
进一步,如图3、图4所示,螺旋挤压单元包括主破碎轮14、从破碎轮15、液压推杆27、第一电机25、第二电机26、第一固定杆16和第二固定杆17,主破碎轮14和从破碎轮15分别对应与第一电机25、第二电机26输出轴连接,第一电机25带动主破碎轮14转动,第二电机25带动从破碎轮15转动,且主破碎轮14和从破碎轮15相向转动,即主破碎轮14为顺时针转动,从破碎轮15为逆时针转动,在本实施例中,第一电机25和第二电机26固定在破碎轮同一侧,即同时固定在第一固定杆16或第二固定杆17内,且第一固定杆16和第二固定杆17为中空结构,如图5、6所示,第一电机和第二电机固定在第一固定杆16内,第二电机26通过连接板28与液压推杆27连接,液压推杆27固定在第一固定杆16内,通过控制液压推杆27的伸缩进而带到第二电机26向第一电机方向移动或远离,第一固定杆16和第二固定杆17内侧面均设置有长度相同的开口29,该开口29长度决定从破碎轮移动的距离,在移动到离主破碎轮最近的端点时,主破碎轮和从破碎轮之间距离为0.8cm,在开口处均设置有滑块30和滑轨,滑块30设置在滑轨上,滑块30内设置有第二轴承,该第二轴承套设在第二电机26输出轴外表面上,第二电机输出轴通过从破碎轮的一端连通从破碎轮15中心,并从另一端伸出,与第二固定杆内的滑块连接。第一电机25输出轴连通主破碎轮14中心,且第一电机25两端分别与位于第一固定杆和第二固定杆内的第一轴承连接。
第一固定柱18固定在垃圾箱体2内部一侧面上,与风扇位于同一侧,第二固定柱19固定在固定框12上。当垃圾落入螺旋挤压单元时,主破碎轮14和从破碎轮15相向转动,在正常转动时,主破碎轮和从破碎轮之间保持有一定的缝隙,该缝隙为主破碎轮和从破碎轮之间的最短距离,取值范围为0.8cm,当垃圾挤压完成后垃圾即可实现自动掉落,。若在挤压过程中,若电机反馈力大于阈值时,说明可能是玻璃瓶、陶瓷片和电池导致的挤压费力,控制液压横杆收缩,带动从破碎轮向远离主破碎轮方向转动,垃圾掉落。本发明通过控制柔性挤压力量(通过转动压力反馈来调整液压推杆力度)避免玻璃瓶、陶瓷片和电池受到挤压破坏。
进一步,如图3和图4所示,筛选单元包括第一钢筛20、第二钢筛21、第三钢筛22,第一钢筛20、第二钢筛21、第三钢筛22倾斜设置,第一钢筛20、第二钢筛21和第三钢筛22的两端通过弹簧固定在第一固定柱和第二固定柱上,第一钢筛20、第二钢筛21、第三钢筛22通过震动器实现震动,震动器可设置在第一钢筛20、第二钢筛21、第三钢筛22底部。第一钢筛20、第二钢筛21、第三钢筛22设置有不同的孔径,第一钢筛20、第二钢筛21、第三钢筛22孔径依次变小,具体的,第一钢筛20孔径可设置为1.5厘米,第二钢筛孔径可设置为1厘米,第三钢筛孔径可设置为0.8厘米,可根据实际情况进行设定,关于刚筛孔径具体尺寸不作具体限定。
本发明针对垃圾物质的不同比重和直径进行三级分离,通过震动器将第一钢筛、第二刚筛和第三钢筛进行震动,通过倾斜设置的结构实现对电池、石块和硬质塑料等以上未处理有害物质的分离,将落入到可回收垃圾桶24中。筛选完成的厨余垃圾和不可回收物置于不可回收垃圾桶23,作后期填埋和生物发酵进行除臭回收操作。
本发明工作流程如图7所示,通过AI识别单元对待处理垃圾进行初步判断,尺寸合格舱门才开启,垃圾进入切割单元,当垃圾落到托盘上后,液压升降柱移动,带动固定板向下运动,固定板和托盘挤压垃圾,压力传感器通过固定板和托盘之间的压力判断是否对垃圾进行切割,若满足预设压力控制器控制切割轮进行切割。当垃圾切割完成后,电动推杆伸缩,两个半圆形托盘分开,垃圾落入螺旋挤压单元,通过主破碎轮、从破碎轮进行挤压,挤压完成后主破碎轮和从破碎轮分离,垃圾通过主破碎轮、从破碎轮之间的缝隙落入筛选单元,筛选单元通过震动将可回收垃圾落入可回收垃圾桶中,厨余垃圾和不可回收物通过刚筛孔径置于不可回收垃圾桶,作后期填埋和生物发酵进行除臭回收操作。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。