一种大蒜播种机
文献发布时间:2023-06-19 19:23:34
技术领域:
本发明属于农用机械设备技术领域,具体涉及一种大蒜播种机,用于实现大蒜的规模化和机械化播种。
背景技术:
大蒜播种机是目前农业生产中紧缺的一种农用播种机。播种大蒜时,首先要保证蒜种鳞芽朝上,如果鳞芽朝下可能无法出芽,如果平躺会导致生长不齐,从而影响产量;要保证蒜种间距一致,以青岛平度的大蒜基地种植为例,蒜种间距为8cm,小于8cm会影响蒜薹产量,大于8cm会浪费土地,不能一穴多蒜,也不能漏蒜缺种;要保证播种时蒜种在同一条直线上,播种线路弯曲会影响铺设滴灌、起垄、覆膜等作业;要保证蒜种深浅一致,播种蒜种过浅会平躺无法直立,过深无法直观地观察是否缺种,还会影响出苗率;最后要保证机械的可靠性和性价比。
现有技术中的大蒜播种机要不过于低端,无法满足农民使用要求,要不过于复杂且价格高昂,尤其是那些使用过重的履带底盘和电气化控制的设备,通过气缸、油缸等做动器实现播种动作,其在农田野外环境生产条件下的使用寿命难以保证。
如图1所示,为了保证播种准确和大蒜直立,大蒜播种机选择使用鸭嘴播种器;为了保证生产效率,大蒜播种机需要一边前进一边完成播种动作,鸭嘴播种器的运行轨迹类似椭圆形,以保证鸭嘴入土时与地面保持基本相对静止,基于此,一般的技术方案选择使用曲柄连杆机构,但是,这无法解决鸭嘴动作的动力源问题,因为鸭嘴播种器的椭圆形运动轨迹,很难使用机械传动方式使鸭嘴张开闭合,所以,出现了如图2所示的使用油缸、气缸、电动缸等各种动作缸的技术方案。例如,中国专利201721316638.1公开的一种大蒜播种机,包括机架、驱动机构、播种机构和举升转向机构;所述机架一侧设置驱动机构,该驱动机构包括,设置在所述机架一侧上部的发动机单元、液压驱动单元和变速箱,设置在所述机架该侧底部的轧沟平行驱动辊,该轧沟平行驱动辊一侧与所述液压驱动单元驱动连接,另一侧与所述变速箱驱动连接,所述发动机单元与液压驱动单元驱动连接;所述播种机构包括,种子箱、取种器单元和多个出种通道,所述种子箱设置在所述机架另一侧上部,所述取种器单元纵向布置且至少部分伸入所述种子箱内,所述出种通道间隔并列纵向布置,其顶部与所述取种器单元的顶部相导通,所述取种器单元与所述变速箱驱动连接;所述举升转向机构包括设置在所述机架底部竖直布置的液压缸,该液压缸与所述液压驱动单元流体连接,所述液压缸底端设有可旋转底座。但是,其在耕地生产条件下的使用寿命难以保证。因此,迫切需要一种容易操作、可靠性高、性价比高的大蒜播种设备。
发明内容:
本发明的目的在于克服现有技术存在的难点,研发设计一种大蒜播种机,充分考虑现实需求,保证高准确率和高可靠性,实现高性价比,方便农民耕种使用。
为了实现上述目的,本发明涉及的大蒜播种机的主体结构包括与前轮及转向机构连接的机体框架,以及机体框架上设置的播种机构、取蒜机构和后轮及动力机构;前轮及转向机构的主体结构包括通过支架与把手连接的前轮,以及支架上设置的千斤顶;机体框架设置有下轴、前轴和后轴,下轴通过下曲柄和拉杆与播种机构连接,前轴通过前曲柄、前曲柄短轴和四号传动组件与播种机构连接,后轴通过后曲柄、后曲柄短轴和五号传动组件与播种机构连接;播种机构上设置有具有凸轮组件的前凸轮轴和后凸轮轴,两组凸轮组件均与摇臂连接,摇臂的上方设置有扶正器,下方设置有鸭嘴播种器;取蒜机构设置有蒜种仓、主动轴和从动轴,蒜种仓的下方设置有导种管,主动轴通过六号传动组件与后轮及动力机构连接,主动轴与从动轴通过输送器连接;后轮及动力机构的主体结构包括通过变速器和七号传动组件与驱动轴连接的发动机,以及驱动轴两端设置的具有离合器的后轮。
本发明涉及的机体框架的后端还设置有相互连接的滴灌和滴灌铺设组件;千斤顶通过连杆与机体框架连接;下轴通过一号传动组件与前轴连接,前轴通过二号传动组件与后轴连接,后轴通过三号传动组件与后轮及动力机构连接,下轴、前轴和后轴三轴同速转动;输送器上等间距式设置有若干个蒜种勺。
本发明涉及的大蒜播种机使用时,通过千斤顶提高大蒜播种机的离地高度,牵引运输至农田后,在蒜种仓内倒入蒜种,将离合器闭合,通过千斤顶降低大蒜播种机的离地高度,调整鸭嘴播种器的深浅,将滴灌铺设组件埋入土中,开启发动机,闭合变速器上的离合,开始前进播种,通过把手控制前进方向,播种完成后,断开变速器的离合,
关闭发动机,断开离合器,通过千斤顶提高大蒜播种机的离地高度,后轮独立自由转动,不再受驱动轴的控制,进行牵引运输。
本发明与现有技术相比,为了解决播种机构进行椭圆轨迹动作的同时,鸭嘴播种器还要张开闭合的难题,在曲柄结构的基础上增加了同步传动组件,摒弃了做动元器件及其配套的电力系统、气动系统或液压系统,解决了大蒜播种机成本、寿命、重量、可靠性等问题,并使播种株距稳定一致,大蒜播种位置准确;采用稳定可靠的机械传动,通过不同传动比保证蒜种位置的稳定准确;采用悬臂式结构的蒜种勺,取蒜准确率高,解决了蒜种易堆叠、蒜种易掉落、一勺多蒜的难题;采用扶正器排除生长异形的大蒜,使播种鳞芽朝上率接近100%;后轮配置独立的离合器,田间运输方便灵活,播种时通过离合器使后轮同轴同步转动,达到类似越野汽车差速锁的越野效果,保证在田地里行走笔直,不会因耕地阻力问题而行驶弯曲,播种完成后,独立自由转动,方便行走,能够像普通三轮车一样行驶或者牵引;通过手摇式千斤顶,既能方便的调节播种深度,又能提高底盘离地间隙,具有良好的道路运输性和越野性。
附图说明:
图1为本发明背景技术涉及的鸭嘴播种器的播种原理示意图。
图2为本发明背景技术涉及的动作缸的结构示意图。
图3为本发明的主体结构示意图。
图4为本发明的局部结构示意图。
图5为本发明的立体图。
图6为本发明涉及的短轴与凸轮轴的连接关系示意图。
图7为本发明涉及的蒜种勺的结构示意图。
图8为本发明涉及的凸轮机构的结构示意图。
具体实施方法:
下面结合附图并结合具体实施方法对本发明做进一步的说明。
实施例:
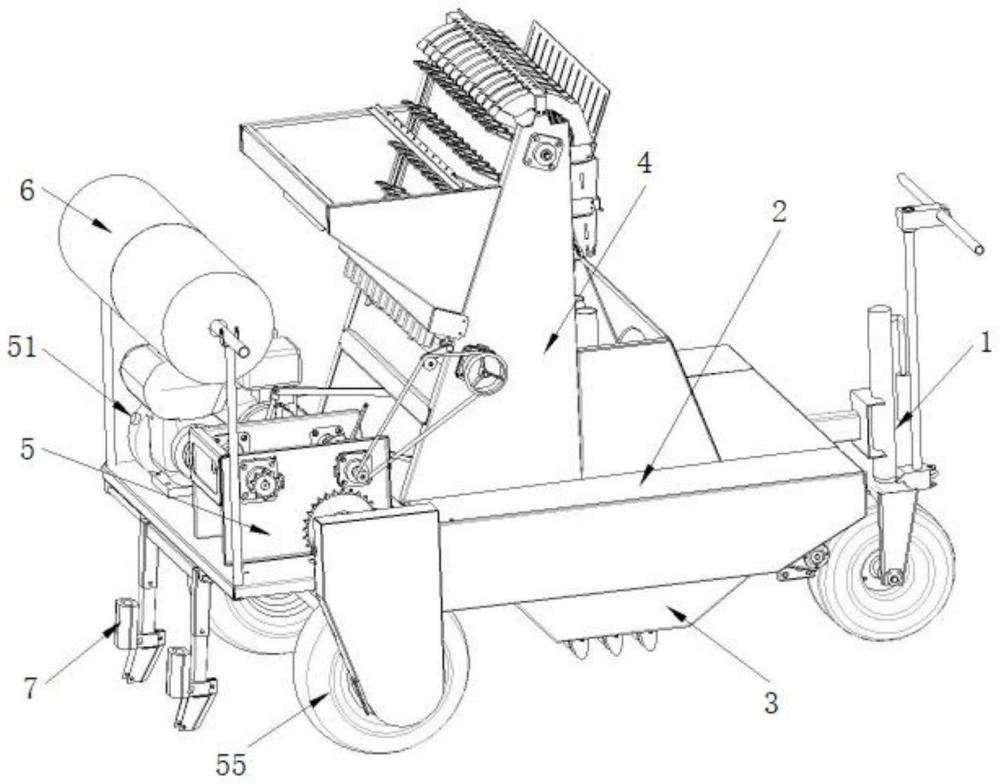
本实施例涉及的大蒜播种机的主体结构包括前轮及转向机构1、机体框架2、播种机构3、取蒜机构4和后轮及动力机构5;前轮及转向机构1与机体框架2的前端连接,机体框架2的下方设置有播种机构3,上方设置有取蒜机构4,后端设置有后轮及动力机构5;前轮及转向机构1的主体结构包括前轮11、支架12、把手13、千斤顶14和连杆15;前轮11通过支架12与把手13连接,支架12上设置有千斤顶14,千斤顶14通过连杆15与机体框架2连接;机体框架2设置有下轴201、前轴202和后轴203,下轴201通过一号传动组件204与前轴202连接,前轴
202通过二号传动组件205与后轴203连接,后轴203通过三号传动组件206与后轮及动力机构5连接,下轴201、前轴202和后轴203三轴同速转动;下轴201通过下曲柄207与拉杆208连接,拉杆208与播种机构3连接,前轴202通过前曲柄209与前曲柄短轴210连接,前曲柄短轴210通过四号传动组件211与播种机构3连接,后轴203通过后曲柄212与后曲柄短轴213连接,后曲柄短轴213通过五号传动组件214与播种机构3连接;播种机构3设置有前凸轮轴31和后凸轮轴32、前凸轮轴31和后凸轮轴32上均设置有凸轮组件33,两组凸轮组件33均与摇臂34连接,摇臂34的上方设置有扶正器35,下方设置有鸭嘴播种器36;取蒜机构4设置有蒜种仓41、主动轴42和从动轴43,蒜种仓41的下方设置有导种管44,主动轴42通过六号传动组件45与后轮及动力机构5连接,主动轴42与从动轴43通过输送器46连接,输送器46上等间距式设置有若干个蒜种勺47;后轮及动力机构5的主体结构包括发动机51、变速器52、七号传动组件53、驱动轴54、后轮55和离合器56;发动机51与变速器52连接,变速器52通过七号传动组件53与驱动轴54连接,驱动轴54的两端均设置有后轮55,且后轮55处设置有离合器56;此外,机体框架2的后端还设置有相互连接的滴灌6和滴灌铺设组件7。
本实施例涉及的凸轮组件33的主体结构包括杠杆331及其端部设置的从动滚子333和I型连杆334,及与从动滚子333接触的凸轮335,与I型连杆334连接L型连杆336,以及与L型连杆336连接的一型连杆337,杠杆331通过安装座332设置于播种机构3上,其一端设置有从动滚子333,另一端与I型连杆334连接,从动滚子333与前凸轮轴31和后凸轮轴32上设置的凸轮335接触,I型连杆334的底端与L型连杆336连接,L型连杆336分别与一型连杆337和鸭嘴播种器36的动作轴361连接,通过一型连杆337能够串联若干个鸭嘴播种器36的动力轴361,当凸轮335转动时,带动从动滚子333做升-降往复动作,通过杠杆331带动I型连杆334上下动作,通过I型连杆334带动L型连杆336左右摆动,使动作轴361正反转动,进而带动鸭嘴播种器36完成张开闭合动作;扶正器35与导种管44连接,为中国专利20182214191.7公开的大蒜鳞芽扶正装置,蒜种鳞芽朝上率接近100%;主动轴42通过六号传动组件45与变速器52连接;蒜种勺47为悬臂式结构,能够使多余的蒜种掉落,保证一勺一蒜;后轮55为动力轮,数量为大于等于2的偶数;后轴203通过三号传动组件206与变速器52连接;一号传动组件204、二号传动组件205、三号传动组件206、四号传动组件211、五号传动组件214、六号传动组件45和七号传动组件53采用同步带轮传动或链轮传动,以四号传动组件211和五号传动组件214为例,其主体结构均包括传动轮200和传动带300;前曲柄短轴210与前凸轮轴31连接,后曲柄短轴213与后凸轮轴32连接,二者的连接方式相同,首先,使用连杆100将短轴与凸轮轴连接,然后,在短轴和凸轮轴上分别套设传动轮200,最后,通过传动带300连接两个传动轮200,以使短轴与凸轮轴同速转动,其中,短轴上的传动轮200为主动轮,凸轮轴上的传动轮200为从动轮。
本实施例涉及的大蒜播种机的重量小于等于200KG,重量轻,播种效率为1亩/小时,可靠性高,使用时,发动机51的动力经过变速器52变速后,经过3个输出端进行不同转速的动力输出,分别带动播种机构3、取蒜机构4和后轮55动作,不同传动比使得3个动作相互配合实现边前进边播种的目的,具体过程是:
经三号传动组件206带动下轴201、前轴202和后轴203同步转动,经下曲柄207带动播种机构3前后动作,经前曲柄209和后曲柄212带动播种机构3上下动作,三组曲柄相互平行并同速转动,将播种机构3视为一点,其运行轨迹为椭圆形,在前进过程中鸭嘴播种器36插入土穴中时与地面保持相对静止;前曲柄209和后曲柄212转动时,前曲柄短轴210和后曲柄短轴213上的主动轮将动力经四号传动组件211和五号传动组件214分别传递给前凸轮轴31和后凸轮轴32,使前凸轮轴31和后凸轮轴32与前轴202和后轴203同步转动;播种机构3在沿椭圆轨迹运转过程中,凸轮轴31和后凸轮轴32同速转动,凸轮组件33通过摇臂34带动鸭嘴播种器36动作,播种机构3运行至椭圆轨迹最低点附近时,凸轮组件33拉动鸭嘴播种器36开始张开,播种机构3经过椭圆轨迹最低点设定时间后,鸭嘴播种器36开始关闭,如此循环,使鸭嘴播种器36沿着椭圆轨迹完成入土、张开、抬起和闭合的往复动作;
经六号传动组件45带动主动轴42转动,通过从动轴43和输送器46进一步带动蒜种勺47将蒜种从蒜种仓41内取出,蒜种经过导种管44进入扶正器35,第一波蒜种在进入导种管44时,鸭嘴播种器36处于闭合状态,待鸭嘴播种器36入土完成第一波蒜种的播种抬起后,第二波蒜种正好投入导种管44,如此往复,完成取蒜和投入动作;
经七号传动组件53带动驱动轴54转动,离合器56闭合,后轮55随驱动轴54同步转动,驱动大蒜播种机前进,通过把手13控制大蒜播种机的前进方向,大蒜播种机每匀速前进设定长度播种机构3完成一次播种,且鸭嘴播种器36入土时与地面保持相对静止,如此往复控制播种株距。
- 大蒜播种机行走装置及大蒜播种机
- 大蒜定向播种机、大蒜定向插植装置及大蒜定向插植方法