一种建筑废弃物分拣机器人及分拣方法
文献发布时间:2023-06-19 19:37:02
技术领域
本申请涉及建筑废弃物分拣设备技术领域,更具体地说,涉及一种建筑废弃物分拣机器人。
背景技术
建筑废弃物在建筑施工、改建等过程中产生,而在产生后需要将墙体块与内部的钢筋分开分拣,进行重复利用。
现有技术公开号为CN213355693U的文献提供一种建筑废弃物分拣处理装置,通过拉动连接板沿着活动板移动至合适位置,可以对容腔大小进行调节,使该装置可对不同种类的废弃物进行分隔放置,但该装置在进行分拣的过程中,直接对建筑垃圾进行分拣,而在建筑垃圾中如建筑块中,会有钢筋等金属嵌在内部,从而无法对其进行有效的分拣,使得分拣效果差。
现有专利解决方案如CN214600493U所公开的一种建筑废弃物资源化处理分拣装置,通过破碎辊在箱体中转动对废料进行破碎,将水泥等与铁分离,通过转座带动磁辊转动对废料中的铁金属进行吸附,并通过拉动槽板驱使圆盘在磁辊的外壁移动将磁辊表面的铁刮掉进行收集,该装置能够实现铁金属的吸附收集,但在磁辊表面吸附有一定铁金属时,建筑废料的继续下落会将已被吸附的部分铁金属击落,使得分拣效果大打折扣。
发明内容
1.要解决的技术问题
本申请的目的在于提供一种建筑废弃物分拣机器人的方法,解决了上述背景技术中的装置在进行分拣的过程中,直接对建筑垃圾进行分拣,难以对建筑块中的钢筋等金属有效的分拣,且在现有技术中的建筑废料的继续下落会将已被吸附的部分铁金属击落,使得分拣效果大打折扣,分拣效果差的技术问题。
2.技术方案
本申请技术方案提供了一种建筑废弃物分拣机器人,包括分拣箱;
收集箱可拆卸设置于分拣箱内部一侧;
进料斗固定设置于分拣箱一端;
分离机构设于分拣箱内部并贯穿其顶部延伸至外部,所述分离机构包括分离块,所述分离块通过重力驱动实现垂直升降运动对建筑废弃物进行敲击分离;
分拣机构设于分拣箱内部,所述分拣机构包括分拣板,所述分拣板通过换向驱动改变其相对收集箱上方的位置角度对建筑废弃物进行分拣收集;
推动块滑动设置于所述分拣箱内部,用于推动建筑废弃物向收集箱一侧移动,当分离块向上运动时,推动块恰好开始向收集箱一侧移动以推送击碎的物料。
通过采用上述技术方案,通过分离分拣机构的设置,可以对墙体块进行击碎处理,从而可以让墙体块与钢筋分离,可以有效剔出内部的钢筋,提高后期分拣的效果,避免无效分拣的情况,提高资源的利用率。
作为本申请文件技术方案的一种可选方案,所述推动块呈梯形结构设置;在推动块向收集箱一侧运动到极限位置时,分拣板正好处于最接近收集箱上方的位置,使分拣板得以充分贴近击碎后的物料进行钢筋分拣;
所述推动块一侧固定设置有伸缩杆A,所述伸缩杆A嵌设于分拣箱内壁。
通过采用上述技术方案,可以让进入分拣箱内部的建筑废弃物滑落到分拣箱底面,通过推动块将建筑废弃物推动到分离块下方进行冲击破碎,并将已被击碎的建筑废弃物推向收集箱上方的倾斜板,使分拣板可将其中的钢筋进行吸附分拣,而其余建筑废弃物将落入收集箱之中进行收集。
作为本申请文件技术方案的一种可选方案,所述分拣箱中部固定设置有挡板;所述挡板呈倾斜结构;所述分拣箱内部位于收集箱的上侧的位置呈倾斜结构设置。
通过采用上述技术方案,挡板的设置可以让废弃物尽可能均通过分离块进行击碎,不会在推动块的作用下直接进入到下一个部分,减少快速滑落。
作为本申请文件技术方案的一种可选方案,所述分离块内部滑动设置有缓冲块,所述缓冲块外侧至少固定设置有一个限位块,所述限位块与所述分离块内部开设的限位槽滑动连接;
所述缓冲块一侧固定设置有多个弹簧,所述弹簧一端与分离块内壁连接固定。
通过采用上述技术方案,通过分离块内部结构的设置,可以在使用的过程中使缓冲块接触墙体块,从而起到隔山打牛的震碎效果,同时也减少了在击碎的过程中出现蹦石的情况,而且可以对整体进行缓冲,减少设备的震动,延长其使用寿命。
作为本申请文件技术方案的一种可选方案,所述重力驱动包括对称转动设置于分离块外侧的两个支撑杆,所述支撑杆中部转动设置有限位杆,所述限位杆外端与分拣箱内壁转动连接;
所述支撑杆外端转动设置有移动块,所述移动块与分拣箱内壁滑动连接。
通过采用上述技术方案,通过重力驱动的设置,在对分离块进行抬升后,可以对分离块附加向下的作用力,并配合分离块自身的重力,使击碎的力度更加的有力,提高了击碎的效果。
作为本申请文件技术方案的一种可选方案,所述分离块外侧转动设置有稳定杆,所述稳定杆一端与移动块外侧转动连接;
所述稳定杆与支撑杆呈平行结构设置;
借助限位杆的转动驱使支撑杆在移动块的滑动限位下进行往复摆动,通过稳定杆与支撑杆的同步平行摆动,使分离块在做升降往复运动的同时始终保持垂直状态。
通过采用上述技术方案,稳定杆的设置,保证了分离块在做升降往复运动的同时能够始终保持垂直状态,使分离块与建筑废弃物之间的接触面积保持最大,尽可能地发挥分离块的击碎效果。
作为本申请文件技术方案的一种可选方案,所述分拣箱内壁开设有驱动槽,所述驱动槽内部滑动设置有齿条,所述齿条外壁啮合连接有齿轮,所述齿轮的轴与限位杆外端固定连接;
所述齿条一端固定设置有伸缩杆B,所述伸缩杆B嵌设于分拣箱内壁。
通过采用上述技术方案,通过伸缩杆B带动齿轮齿条驱动,有效的控制的分离块往复的范围及频率,且通过齿条移动的转换,减少力的震动传输,让齿条有更好的限位效果。
作为本申请文件技术方案的一种可选方案,所述换向驱动包括对称转动设置于分拣箱内壁的两个转动盘,所述转动盘由电机驱动其转动;所述转动盘外侧偏心转动设置有连接杆;
所述连接杆中部一侧转动设置有限制杆,所述限制杆一侧端与分拣箱内壁转动连接;
所述连接杆一端转动设置有固定块,所述固定块与分拣板外壁连接固定;
借助连接杆在转动盘上的偏心转动,驱使连接杆在限制杆的摆动限位下实现往复摆动。
通过采用上述技术方案,通过换向驱动的设置,转动盘驱使连接杆在转动盘上的偏心转动,可使分拣板形成大于九十度的定向杆角度,从而在进行分拣时,使分拣板可以改变其与倾斜板之间的位置和角度,使分拣板能够贴近击碎后的物料进行钢筋分拣,并在分拣完毕后可以转出,此定向杆的设置,有效减少了整体的受力效果,减少了驱动的负担,适合长时间使用。
作为本申请文件技术方案的一种可选方案,所述固定块外壁转动设置有定向杆,所述定向杆外端与分拣箱内壁转动连接;
当连接杆在转动盘上运动至靠近限制杆一侧的极限位置时,固定块恰好带动分拣板运动至与收集箱上侧的分拣箱倾斜板相平行的状态,且此时的分拣板与倾斜板最为贴近。
通过采用上述技术方案,通过连接杆与分拣板的运动配合,使分拣板可运动至与收集箱上侧的分拣箱倾斜板相平行,进而使得分拣板能够充分吸附钢筋。
本申请还公开了前述建筑废弃物分拣机器人的使用方法,包括以下步骤:
a、将建筑废弃物通过进料斗放入到分拣箱内部,驱动限位杆进行圆周运动,在移动块的滑动限位下,驱使支撑杆做往复摆动,并在稳定杆的转动限位下,使分离块始终保持铅垂状态,对建筑废弃物进行击碎处理;
b、在分离块敲击完毕后复位上升过程中,驱动推动块进行滑动将物料推动到分拣箱中部后复位;
c、启动电机驱动转动盘转动,驱使连接杆一端绕转动盘中心做偏心圆周运动,在限制杆的限位作用下,连接杆同时绕其与转动盘转动连接位置做往复摆动动作,进而在定向杆的摆动限位下,使固定块带着分拣板运动改变其相对收集箱的位置角度,通过分拣板对分拣箱内部的钢筋进行吸附,而后借助连接杆的摆动将分拣板转动推送至分拣箱外部,并将分拣板吸附有钢筋的一侧朝向外部,通过容器进行收集即可;
d、通过物料的增加,使击碎后的其余物料掉落到收集箱内进行收集处理。
3.有益效果
本申请技术方案中提供的一个或多个技术方案,至少具有如下技术效果或优点:
(1)本申请通过分离机构的设置,可以对墙体块进行击碎处理,从而可以让墙体块与钢筋分离,可以有效地提取出内部的钢筋,提高了后期分拣的效果,避免了无效分拣的情况,减少了资源的浪费,提高了资料的利用率。
(2)本申请通过分拣机构的设置,可使分拣板运动改变其相对收集箱的位置和角度对分拣箱内部的钢筋进行充分吸附分拣,增加了吸附的效果,而后可以将分拣板改变角度到达分拣箱的外部进行,从而可以收集回收。
(3)本申请通过分离块内部结构的设置,可以在使用的过程中让缓冲块接触墙体块,从而起到隔山打牛的震碎效果,同时也减少了在击碎的过程中会出现蹦石的情况,而且可以对整体进行缓冲,减少设备的震动,延长了其使用的寿命。
(4)本申请通过重力驱动的设置,在对分离块进行抬升后,可以对分离块进行向下的作用力,从而配合分离块自身的重力,让击碎的力度更加的有力,提高了击碎的效果。
(5)本申请通过换向驱动的设置,使分拣板能够更贴近击碎后的物料进行钢筋分拣,并在分拣完毕后可以转出,此定向杆的设置,有效的减少了整体的受力效果,减少了驱动的负担,适合长时间实用。
附图说明
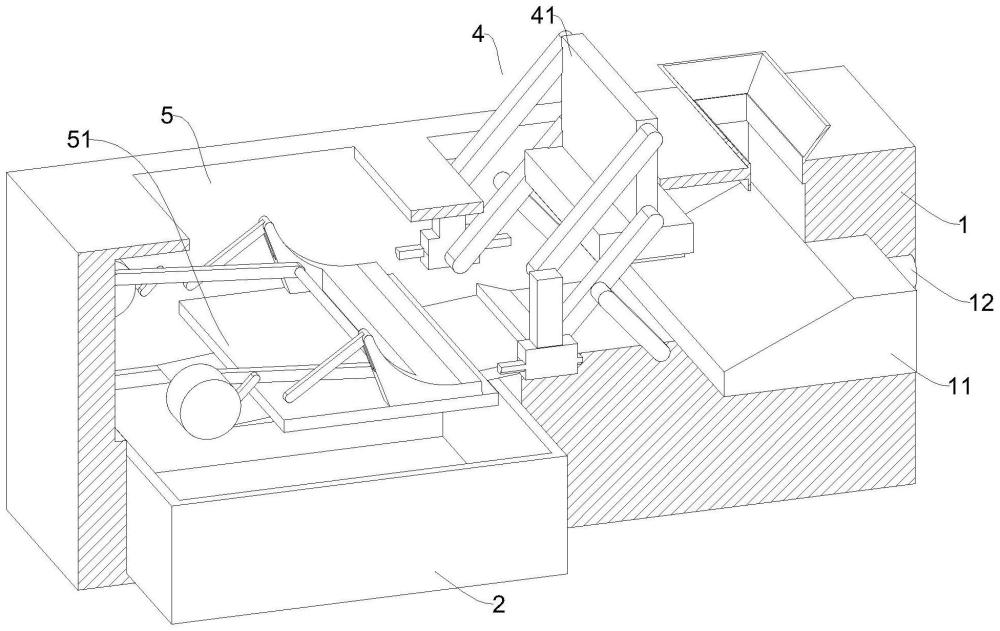
图1为本申请一较佳实施例公开的建筑废弃物分拣机器人的整体结构示意图;
图2为本申请一较佳实施例公开的建筑废弃物分拣机器人的整体结构剖面图;
图3为本申请一较佳实施例公开的建筑废弃物分拣机器人的分离块内部结构爆炸图;
图4为本申请一较佳实施例公开的建筑废弃物分拣机器人的分拣箱结构轮廓示意图;
图5为本申请一较佳实施例公开的建筑废弃物分拣机器人的分离机构结构示意图;
图6为本申请一较佳实施例公开的建筑废弃物分拣机器人的分拣箱内壁内部结构拆分图;
图7为本申请一较佳实施例公开的建筑废弃物分拣机器人的分拣机构结构示意图;
图中标号说明:1、分拣箱;11、推动块;12、伸缩杆A;101、挡板;2、收集箱;3、进料斗;4、分离机构;41、分离块;42、缓冲块;43、限位块;44、限位槽;45、弹簧;401、支撑杆;402、限位杆;403、移动块;404、滑槽;405、滑块;4001、稳定杆;4011、驱动槽;4012、齿条;4013、齿轮;4014、伸缩杆B;5、分拣机构;51、分拣板;52、转动盘;53、连接杆;54、限制杆;55、固定块;56、定向杆。
具体实施方式
以下结合说明书附图对本申请作进一步详细说明。
参照图1、图2和图4,本申请实施例提供了一种建筑废弃物分拣机器人,在分拣箱1内部设置有收集箱2,收集箱2可以移出分拣箱1,以便将其中收集满的建筑废弃物进行倾倒,在分拣箱1一端固定设置有进料斗3,待分拣的建筑废弃物从进料斗3投入分拣箱1之中,分离机构4设于分拣箱1内部并贯穿其顶部延伸至外部,分离机构4包括分离块41,分离块41通过重力驱动实现垂直升降运动对建筑废弃物进行敲击分离,分拣机构5设于分拣箱1内部,分拣机构5包括分拣板51,分拣板51通过换向驱动改变其相对收集箱2上方的位置角度对建筑废弃物进行分拣收集,分拣箱1中部固定设置有挡板101,挡板101呈倾斜结构,分拣箱1内部收集箱2的上侧呈倾斜结构设置,挡板101的设置可以起到缓冲作用,使废弃物尽可能地通过分离块41的击碎,不会在推动块11的作用下直接进入到下一个部分,减少快速滑落。
参照图6,分拣箱1内部滑动设置有推动块11,推动块11呈梯形结构设置,推动块11一侧固定设置有伸缩杆A12,伸缩杆A12嵌设于分拣箱1内壁,可使进入的建筑废弃物滑落到分拣箱1底面,通过推动块11将其推动到分离块41底面进行工作;
为了使分离机构4与推动块11、分拣机构5之间能够实现良好的运动配合关系,对三者之间的运动做进一步限定设计:当分离块41向上运动时,推动块11恰好开始向收集箱2一侧移动以推送击碎的物料,并在推动块11向收集箱2一侧运动到极限位置时,分拣板51正好处于最接近收集箱2上方的位置,使分拣板51得以充分贴近击碎后的物料进行钢筋分拣。如此便可在分离块41完成一次建筑废弃物击碎后,通过推动块11将击碎后的物料推送至收集箱2上方的倾斜板处,同时将未被击碎的物料推动至分离块41的下方等待下一次击碎操作,并在推动块11将击碎后的物料完全推送至倾斜板处时,分拣板51则正好运动至与倾斜板平行,使得分拣板51与倾斜板最为贴近,能够充分靠近并吸附钢筋,将钢筋从击碎后的物料中分拣出来,其余物料则沿着倾斜板滑落至收集箱2内部进行收集。
分拣箱1内壁开设有驱动槽4011,驱动槽4011内部滑动设置有齿条4012,齿条4012外壁啮合连接有齿轮4013,齿轮4013的轴与限位杆402外端固定连接,齿条4012一端固定设置有伸缩杆B4014,伸缩杆B4014嵌设于分拣箱1内壁,通过伸缩杆B4014带动齿轮4013齿条4012驱动,有效控制分离块41往复的范围及频率,且通过齿条4012移动的转换,减少力的震动传输,让齿条4012有更好的限位效果。
参照图5,重力驱动包括对称转动设置于分离块41外侧的两个支撑杆401,支撑杆401中部通过销轴转动设置有限位杆402,限位杆402外端与分拣箱1内壁转动连接,支撑杆401外端通过销轴转动设置有移动块403,移动块403一侧开设有滑槽404,滑槽404内部滑动设置有滑块405,滑块405与分拣箱1内壁连接固定,在对分离块41进行抬升后,可以对分离块41进行向下的作用力,从而配合分离块41自身的重力,让击碎的力度更加的有力,提高了击碎的效果;
分离块41外侧通过销轴转动设置有稳定杆4001,稳定杆4001一端与移动块403外侧转动连接,稳定杆4001与支撑杆401呈平行结构设置,稳定杆4001与支撑杆401尺寸相同,稳定杆4001的设置,保证了分离块41在运过程中始终保持铅垂状态,尽可能地发挥分离块41的击碎效果。
参照图3,分离块41内部滑动设置有缓冲块42,缓冲块42外侧至少固定设置有一个限位块43,限位块43与分离块41内部开设的限位槽44滑动连接,缓冲块42一侧固定设置有多个弹簧45,弹簧45一端与分离块41内壁连接固定,通过分离块41内部结构的设置,可以在使用的过程中让缓冲块42接触墙体块,从而起到隔山打牛的震碎效果,同时也减少了在击碎的过程中会出现蹦石的情况,而且可以对整体进行缓冲,减少设备的震动,延长了其使用的寿命。
参照图7,换向驱动包括对称转动设置于分拣箱1内壁的两个转动盘52,转动盘52外侧通过销轴转动设置有连接杆53,连接杆53设置于靠近转动盘52的边缘处,连接杆53中部一侧转动设置有限制杆54,限制杆54一侧端通过销轴与分拣箱1内壁转动连接,连接杆53一端转动设置有固定块55,固定块55与分拣板51外壁连接固定,固定块55外壁通过销轴转动设置有定向杆56,定向杆56外端通过销轴与分拣箱1内壁转动连接,转动盘52与分拣箱1外壁固定设置的电机同轴固定连接,通过上述结构设置,可使分拣板51形成大于九十度的定向杆角度,从而在进行分拣时,使分拣板51可以改变其与倾斜板之间的位置和角度,使分拣板51能够贴近击碎后的物料进行钢筋分拣,并在分拣完毕后可以转出,此定向杆的设置,有效减少了整体的受力效果,减少了驱动的负担,适合长时间使用;
其中,通过换向驱动的设置,当连接杆53在转动盘52上运动至靠近限制杆54一侧的极限位置时,固定块55恰好带动分拣板51运动至与收集箱2上侧的分拣箱1倾斜板相平行的状态,使分拣板51能够充分贴近击碎后的物料,更好地实现钢筋分拣效果。
分拣板51为电强力吸盘,可以通过开关电来控制电强力吸盘是否进行工作。
当需要该建筑废弃物分拣机器人时,首先,将建筑废弃物通过进料斗3放入到分拣箱1内部,通过控制器启动伸缩杆B4014伸缩,带动了齿条4012移动,而齿条4012与齿轮4013啮合,从而带动了齿轮4013转动角度,从而带动了限位杆402进行圆周运动,由于支撑杆401一端限制在移动块403上进行直线的运动,另一端为活动端可以进行上下的运动,可使支撑杆401在移动块403的滑动限位下做往复摆动,从而可以带动分离块41运动,此时由于稳定杆4001的设置保证了分离块41在运动过程中始终保持铅垂状态,对建筑废弃物进行击碎处理;
而由于分离块41上缓冲块42的设置,通过弹簧45的缓冲,有效减少了震动的效果;
敲击完毕后,驱动伸缩杆A12伸缩,带动了推动块11进行运动,从而将物料推动到分拣箱1中部后复位,此时,启动电机转动带动了转动盘52转动,从而带动了连接杆53的一端绕转动盘52中心做偏心圆周运动,而连接杆53受到限制杆54的限位,使得连接杆53可同时绕其与转动盘52转动连接位置做往复摆动动作,使固定块55运动,此时由于固定块55上设置有定向杆56对其进行限位,从而可使固定块55带着分拣板51进行摆动下降吸附钢筋后再进行抬升运动,此时分拣板51可以对分拣箱1内部的钢筋进行吸附,而后通过运动让分拣板51到达分拣箱1外部,通过容器进行收集即可,通过物料的增加,让之前的物料掉落到收集箱2内进行收集处理。
- 一种用于物料分拣的托盘分拣设备及其分拣方法
- 多规格板材分拣分包机器人和分拣分包方法
- 爬坡建筑废弃物分拣机器人系统及控制方法、装置、介质
- 爬坡建筑废弃物分拣机器人系统及控制方法、装置、介质