一种准单级式变母线电压电机驱动装置及控制方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于电机控制技术领域,更为具体地讲,涉及一种准单级式变母线电压电机驱动装置及控制方法。
背景技术
随着人们对化石能源短缺和温室气体排放的日益关注,用电动汽车取代石油动力汽车的方案吸引了越来越多人的注意力。近年来,由于电池技术、电力电子接口技术和控制策略的进步,由新能源驱动的电动汽车已成为内燃机汽车的替代品。事实上,电池驱动的电动汽车为环保问题提供了一个理想的解决方案,它不仅能减少汽车对环境的影响,还能减少汽车对于化石能源依赖,并且实现局部零排放。然而,到目前为止电动汽车仍然面临着许多挑战,例如驾驶时间有限,充电时间长,动力系统性能差,初始成本高等。在这些挑战中,选择合适的电机驱动拓扑和调制方法能够减少电能在传输过程中的损耗,减少能量传递能级实现更高效率的能量传递。
目前的电机驱动拓扑多为两级式,即电源系统经过DC-DC变换器,DC-AC逆变器后,实现电机的驱动。这样的结构存在一些弊端:一是DC-DC变换器中笨重的电力滤波器增加了系统重量和体积,降低了系统的功率密度;二是电源系统和电动机之间能量流动需要经过两次能量变换,降低了能量传输效率,亟需一种新的高效率电机驱动拓扑。
发明内容
本发明的目的在于克服现有技术的不足,提供一种准单级式变母线电压电机驱动装置及控制方法,提供了从电池到逆变器的直接能量流路径,减少了能级转换,提高了系统的能量传输效率。
为实现上述发明目的,本发明提出了一种准单级式变母线电压电机驱动装置,其特征在于,包括:副端口直流升压变换器、主端口直流母线输出稳压电容、直流母线输出电压检测器、多端口电流逆变器、三相电流检测器和电机驱动控制器;
所述副端口直流升压变换器包括升压电感L、升压桥臂A、稳压电容C
所述主端口的直流母线输出稳压电容并联在主端口直流电源的两端;
所述直流母线输出电压检测器分别与副端口升压变换器的稳压电容C
所述多端口电流逆变器包括第一桥臂、第二桥臂、第三桥臂;其中,第一桥臂、第二桥臂、第三桥臂并联在副端口直流升压变换器的两端,主端口直流母线输出稳压电容并联在第一桥臂、第二桥臂、第三桥臂的中线的两端;且第一桥臂、第二桥臂、第三桥臂分别与三相电流检测器相连;
所述第一桥臂又包括第一开关管S
其中,S
所述三相电流检测器的输入端分别与S
所述电机驱动控制器包括位置编码模块、速度计算模块、模式选择模块、母线电压PI调制模块、多端口逆变器调制模块、T
其中,位置编码模块的输入端与永磁同步电机连接,其输出端与速度计算模块、T
速度计算模块的输出端通过第一差运算单元与转速PI控制模块的输入端连接,用于将给定转速
转速PI控制模块的输出端通过第二差运算单元与q轴PI控制模块的输入端连接,用于将三相电流检测器采样的三相电流i
d轴PI控制模块的输入端连接第三差运算单元,用于将三相电流检测器采集的三相电流i
d轴PI控制模块和q轴PI控制模块的输出端与T
多端口逆变器调制模块的输入端和T
模式选择模块的输出端与第四差运算单元连接,用于将给定转速
母线电压PI调制模块的输入端通过第四差运算单元与模式选择模块输出端连接,用于将参考电压v
进一步的,本发明还提供一种准单级式变母线电压电机驱动装置的控制方法,其特征在于,包括以下步骤:
(1)、根据给定转速计算出多端口电流逆变器最佳工作电压v
(1.1)、设永磁同步电机的给定转速为
(1.2)、计算多端口电流逆变器的最佳工作电压v
其中,p为极对数,ψ
(1.3)、将v
(1.4)、根据速度命令设定直流母线参考电压v
当速度命令为低速模式时,设定直流母线参考电压为v
(2)、根据直流母线参考电压v
(2.1)、利用第四差运算单元计算直流母线参考电压v
(2.2)、利用直流母线电压调制模块计算参考电压v
v
其中,v
(2.3)、将参考电压v
(2.4)、在一个开关周期内,将调制波与载波进行比较,得到副端口直流升压变换器控制开关S
(3)、将永磁同步电机在旋转坐标系下的电压变换为静止坐标系下的参考电压;
(3.1)、设三相交流电机的给定转速为
(3.2)、通过位置编码模块获取三相交流电机的位置角度θ,将θ输入至速度计算模块得到三相交流电机的实际转速w
(3.3)、将
(3.4)、将三电平逆变器产生的三相电流i
(3.5)、将
(3.6)、给定d轴第二给定电流
(3.7)、将第一给定电压v
(4)、将参考电压v
(4.1)、根据速度命令模式,计算各相开关信号的驻留时间;
当速度命令为低速模式时,采用传统的两电平空间矢量调制策略生成各相开关信号的驻留时间;
当速度命令为高速模式时,第一级先按照两电平空间矢量的调制策略得到每相开关信号的虚拟驻留时间t
v
0≤d
其中,v
(4.2)、多端口逆变器调制模块根据各相的驻留时间生成调制波形,然后在一个开关周期内将调制波形分别与三角载波的幅值进行比较,生成六个驱动多端口电流逆变器的开关信号G
本发明的发明目的是这样实现的:
本发明一种准单级式变母线电压电机驱动装置及控制方法,包括副端口直流升压变换器、主端口直流母线输出稳压电容、直流母线输出电压检测器、多端口电流逆变器、三相电流检测器和电机驱动控制器;具体来讲,本发明提供了从电池到逆变器的直接能量流路径,减少了能级转换,提高了系统的能量传输效率;另外,本发明针对不同工作状况下的需要,提出了基于空间矢量脉宽调制的两级调制策略,可实现变直流母线电压的操作,提升了系统的整体传动效率和复杂工况下的稳定性。
同时,本发明一种准单级式变母线电压电机驱动装置及控制方法还具有以下有益效果:
(1)、在不同工作状况下,本发明提出了基于空间矢量脉宽调制的两级调制策略,可实现变直流母线电压的操作,提升了系统的整体传动效率和复杂工况下的稳定性,并有效解决了现有的传统两级式电机驱动拓扑低功率密度和低能量传输效率的技术问题。
(2)、将准单级式变母线电压电机驱动装置扑用于新能源汽车中,可以替代现有的两级式电机驱动拓扑,提升了整个系统的效率,可提高系统的功率密度和能量传输效率,降低了成本。
(3)、两级调制策略可以根据不同的速度命令选择不同的调制方案,在高速模式下不需要复杂的三角计算,简化了计算过程,并且通过两级空间矢量调制算法,使得主副端口的能量分配实现最优化,提高了系统整体电能利用率,更适应新能源汽车的发展需要。
附图说明
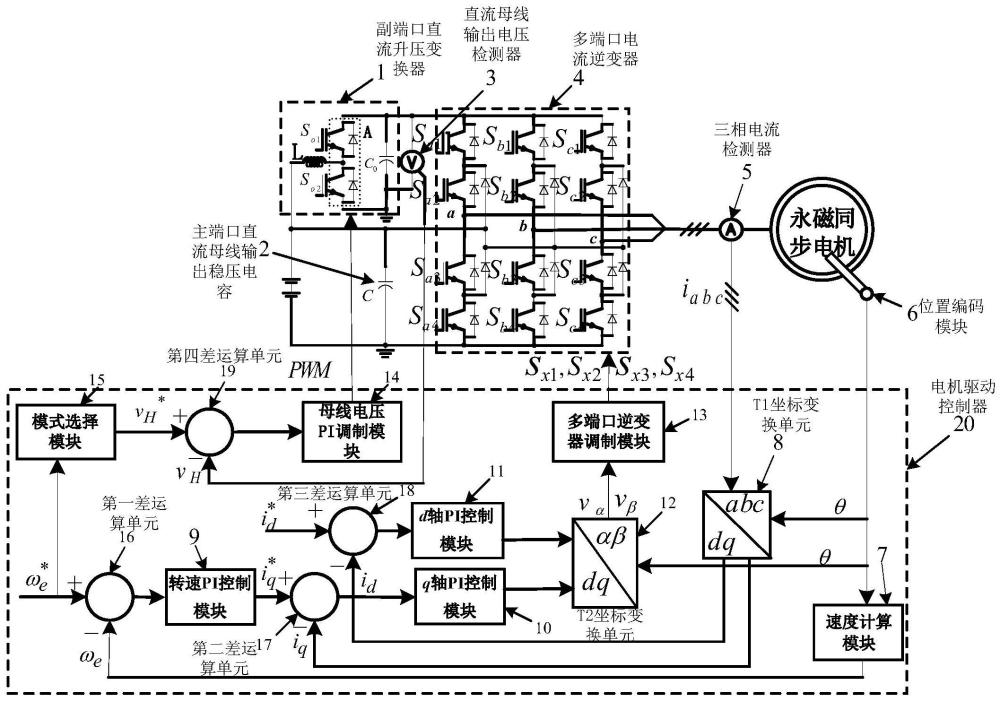
图1是本发明一种准单级式变母线电压电机驱动装置原理图;
图2是准单级式变母线电压电机驱动装置高速模式下的控制方法示意图;
图3是准单级式变母线电压电机驱动装置拓扑结构图;
图4是准单级式变母线电压电机驱动装置设
图5是准单级式变母线电压电机驱动装置设
图6是准单级式变母线电压电机驱动装置设
图7是准单级式变母线电压电机驱动装置控制方法在
具体实施方式
下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
实施例
图1是本发明一种准单级式变母线电压电机驱动装置原理图。
在本实施例中,如图1所示,本发明一种准单级式变母线电压电机驱动装置,包括:副端口直流升压变换器1、主端口直流母线输出稳压电容2、直流母线输出电压检测器3、多端口电流逆变器4、三相电流检测器5和电机驱动控制器20;
副端口直流升压变换器1包括升压电感L、升压桥臂A、稳压电容C
主端口直流母线输出稳压电容2并联在主端口直流电源的两端;
直流母线输出电压检测器3分别与副端口升压变换器的稳压电容C
如图3所示,准单级式变母线电压电机装置是由二极管钳位型(NPC型)三电平逆变器拓扑改进而成,在中线和地线之间连接一个电源,将传统的二极管钳位型三电平逆变器的直流侧电容连接到中线和地线之间,并保留原来在直流侧母线电源,在母线和中线之间与母线电源并连上一个直流升压器,同时逆变器也设置有三个桥臂。
多端口电流逆变器4包括第一桥臂、第二桥臂、第三桥臂;所述第一桥臂、第二桥臂、第三桥臂并联在副端口直流升压变换器1的两端,主端口直流母线输出稳压电容2并联在第一桥臂、第二桥臂、第三桥臂的中线的两端;第一桥臂、第二桥臂、第三桥臂分别与三相电流检测器5相连。
第一桥臂包括第一开关管S
第一开关管S
三相电流检测器5输入端分别与所述第二开关管S
电机驱动控制器20还包括位置编码模块6、速度计算模块7、模式选择模块15、母线电压PI调制模块14、多端口逆变器调制模块13、T
位置编码模块6的输入端与永磁同步电机连接,输出端与速度计算模块7、T
速度计算模块7的输出端通过第一差运算单元16与转速PI控制模块9的输入端连接,用于将给定转速
转速PI控制模块9的输出端通过第二差运算单元17与q轴PI控制模块10的输入端连接,用于将三相电流检测器5采样的三相电流i
d轴PI控制模块11的输入端连接第三差运算单元18,用于将三相电流检测器5采集的三相电流i
d轴PI控制模块11和q轴PI控制模块10的输出端与T
多端口逆变器调制模块13的输入端和所述T
模式选择模块15的输出端与第四差运算单元19连接,用于将给定转速
母线电压PI调制模块14的输入端通过第四差运算单元19与模式选择模块15输出端连接,用于将模式选择模块15输出的参考电压v
下面我们对本发明一种高效率的准单级式变母线电压电机驱动装置的控制方法进行详细说明,具体包括以下步骤:
S1、根据给定转速计算出多端口电流逆变器最佳工作电压v
S1.1、设永磁同步电机的给定转速为
S1.2、计算多端口电流逆变器的最佳工作电压v
其中,p为极对数,ψ
S1.3、将v
S1.4、根据速度命令设定直流母线参考电压v
当速度命令为低速模式时,设定直流母线参考电压为v
S2、根据直流母线参考电压v
S2.1、利用第四差运算单元计算直流母线参考电压v
S2.2、利用直流母线电压调制模块计算参考电压v
v
其中,v
S2.3、将参考电压v
S2.4、在一个开关周期内,将调制波与载波进行比较,得到副端口直流升压变换器控制开关S
S3、将永磁同步电机在旋转坐标系下的电压变换为静止坐标系下的参考电压;
S3.1、设三相交流电机的给定转速为
S3.2、通过位置编码模块获取三相交流电机的位置角度θ,将θ输入至速度计算模块得到三相交流电机的实际转速w
S3.3、将
S3.4、将三电平逆变器产生的三相电流i
其中,T
S3.5、将
S3.6、给定d轴第二给定电流
S3.7、将第一给定电压v
其中,T
S4、将参考电压v
S4.1、计算各相开关信号的驻留时间;
当速度命令为低速模式时,采用传统的两电平空间矢量调制策略生成各相开关信号的占空比;
当速度命令为高速模式时,如图2所示,第一级先按照两电平空间矢量的调制策略得到每相开关信号的虚拟驻留时间t
v
0≤d
其中,v
S4.2、多端口逆变器调制模块根据各相的驻留时间生成调制波形,然后在一个开关周期内将调制波形分别与三角载波的幅值进行比较,生成六个驱动多端口电流逆变器的开关信号G
最后将生成的开关信号输入到多端口电流逆变器中,控制各个桥臂的逆变器进行开关动作,最后经电机动作后输出三相电流。
结合实例对本实施例进行说明,如图4、图5、图6所示,设直流电源v
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
- 一种风电机组的变桨电机驱动力矩校核方法及装置
- 一种驱动电机的制动扭矩控制方法、装置和汽车
- 宽输入范围准单级DC/DC变换装置及电压控制方法
- 一种双向准Z源逆变式电机驱动系统的控制方法