一种重力式弹簧除积雪装置
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及除积雪技术领域,具体涉及一种重力式弹簧除积雪装置。
背景技术
LNG储配站的气化生产过程为:零下160度的超低温液态天然气进入空温式气化器内,与外界空气进行热量交换,液态天然气吸收热量后气化形成常温天然气,然后通过管道被输送至城镇燃气管网为下游用户使用。
在气化换热过程中,空气中的水蒸气遇冷结成霜附着在气化器的翅片上,随着换热过程的进行,结霜逐渐增多,大部分结霜会掉落到空温式气化器基础周边,并逐渐形成积雪。积雪越堆越高,尤其是在长时间气化作业生产过程中或不利天气环境下,积雪会逐步覆盖空温式气化器进口及底部换热管道,导致这部分区域无法与空气接触进行换热,同时,积雪也会影响空温式气化器周边的空气对流,降低换热效果。所以,空温式气化器基座周边的积雪必须及时去除,才可以避免空温式气化器的气化过程受到影响。现有的除积雪方式是人工铲雪,这种方式存在以下几个缺点:1.铲雪效率低下,在气化量大以及不利天气条件下,积雪过多无法及时去除,导致空温式气化器无法继续工作,进而影响下游用气;2.人员劳动强度大;3.操作人员暴露于低温的现场环境中,对人员健康有不利影响。
而现有技术公开的除积雪装置均是针对太阳能电板的,而并没有提供对空温式气化器的相关除雪装置,且其是通过加热或者利用装置的斜坡特性来除雪,如专利文献CN109818565A提供了一种光伏电池板自动清除积雪装置,包括加热装置、控制器、积雪厚度传感器和温度传感器,所述加热装置包括光伏电池板和加热带,所述积雪厚度传感器设置在所述光伏电池板的垂直方向上,用于检测光伏电池板上的积雪厚度,所述温度传感器设置在所述光伏电池板上,用于检测光伏电池板表面的温度,所述控制器与所述积雪厚度传感器和温度传感器连接,用于根据所述积雪厚度传感器的检测值和/或温度传感器的检测值确定工作状态,控制电力系统对所述光伏电池板传输电能,以使所述光伏电池板发热清除积雪或控制所述光伏电池板对电力系统传输电能,以进行正常的光伏发电。如专利文献CN206135803U提供了一种太阳能电板除积雪集水装置,其包括蓄水池、集水沟、太阳能电板主体、导热层、挤压块、弹簧、导电棒、蓄电池、触头、支撑盒;所述蓄水池连接集水沟;所述太阳能电板主体背面设置有导热层;所述导热层连接挤压块和导电棒;所述挤压块与弹簧连接;所述弹簧包裹导电棒,弹簧与支撑盒连接;所述导电棒穿过支撑盒;所述支撑盒内设置触头;所述蓄电池通过导线连接太阳能电池板和触头。因此,为提高生产效率,保障下游用气,降低人员劳动强度,改进空温式气化器除积雪的方式是十分必要的。
发明内容
为了解决上述技术问题,本发明采用本发明装置最大的不同是能够利用空温式气化器气化过程中产生的积雪的重力作为动力源来实现自动除积雪功能,在靠近空温式气化器的杠杆平板的积雪重量达到该装置的设定值后,积雪就会被自动弹开至远离空温式气化器基座的其他区域,不会对空温式气化器的气化造成影响。
具体地,一种重力式弹簧除积雪装置,包括杠杆平板、弹性机构、磁性组件和旋转轴;所述磁性组件包括第一磁性组件和第二磁性组件,所述杠杆平板与旋转轴连接,杠杆平板绕旋转轴活动连接,所述杠杆平板内侧设置有弹性机构,所述杠杆平面内侧的一端设置有第一磁性组件,所述空温式气化器上设置有第二磁性组件,当杠杆平板的第一磁性组件向第二磁性组靠近时,此时磁吸力不断增大,直至第一磁性组件和第二磁性组件吸在一起,此时磁吸力最大,当杠杆平板上的第一磁性组件继续下移,此时磁吸力转化为排斥力。
优选地,所述第一磁性组件和第二磁性组件均包括S极部分和N极部分;S极部分和N极部分设置为一体结构,所述S极部分位于N极部分的上面,当杠杆平板的第一磁性组件的N极部分向第二磁性组件的S极部分靠近时,此时为磁吸力不断增大,当第一磁性组件的N极部分与第二磁性组件的S极部分吸在一起,此时磁吸力最大,杠杆平板上的第一磁性组件继续下移,此时磁吸力就转化为排斥力。
优选地,当积雪逐步掉落到杠杆平板时,积雪的重量逐渐压缩弹性机构,杠杆平板逐渐向下移动,当积雪逐渐增加,第一磁性组件和第二磁性组件不断靠近,磁吸力不断加大,直至第一磁性组件和第二磁性组件吸在一起,此时磁吸力最大,当积雪再增多时,积雪的重量迫使杠杆平板上的第一磁性组件继续下移,此时磁吸力就转化为排斥力,力的方向发生了改变,排斥力与弹性机构的弹力一起将杠杆平板上的积雪弹至远离空温式气化器的位置。
优选地,所述弹性机构为压簧弹簧。
优选地,还包括自动控制装置,所述杠杆平板上设置有加热装置和重力传感器,所述加热装置用于加热使积雪融化;所述重力传感器用于感应积雪的重力,所述自动控制装置与加热装置和重力传感器连接,所述自动控制装置还包括设定模块和判断模块,所述设定模块用于设定重力预设值和预设时间,所述判断模块用于判断重力预设值和重力传感器感应到的积雪的重力的大小,当积雪的重力小于重力预设值,并且在预设时间积雪的重力不再增加,则自动控制装置控制加热装置启动,用于将积雪融化;若积雪的重力在预设时间内不断增加,则加热装置处于关闭状态,当积雪的重力增加到重力预设值时,则积雪的重量迫使杠杆平板上的第一磁性组件继续下移,此时磁吸力就转化为排斥力,力的方向发生了改变,排斥力与弹性机构的弹力一起将杠杆平板上的积雪弹至远离空温式气化器的位置。
优选地,所述自动控制装置还包括计时模块,所述计时模块与重力传感器连接,用于记录重力传感器中积雪的重力不再增加的时长,当重力传感器中积雪的重力不再增加的时长大于预设时间时,则自动控制装置控制加热装置启动。
优选地,所述加热装置包括加热层,所述加热层内设置有电热丝。
另一方面,本发明提供了一种重力式弹簧除积雪方法,包括如下步骤:
S1:设定模块设定重力预设值;
S2:实时采集重力传感器的积雪的重力数据,并通过判断模块判断重力预设值和感应器感应到的积雪的重力的大小,若积雪的重力小于重力预设值,并且在预设时间内积雪的重力不再增加,则自动控制装置控制加热装置加热,使用加热装置融化积雪;
若在预设时间内积雪的重力持续增加,则持续采集重力传感器的积雪的重力数据,直至积雪的重力达到该重力预设值,则积雪的重量迫使杠杆平板上的第一磁性组件继续下移,第一磁性组件与第二磁性组件的磁吸力转化为排斥力,力的方向发生了改变,排斥力与弹性机构的弹力一起将杠杆平板上的积雪弹至远离空温式气化器的位置。
优选地,步骤S2中在预设时间内积雪的重力不再增加判断方式具体为,计时模块实时记录重力传感器中积雪的重力不再增加的时长,当重力传感器中积雪的重力不再增加的时长大于预设时间时,则认定预设时间内积雪的重力不再增加,从而自动控制装置控制加热装置启动。
与现有技术相比,本发明所产生的有益效果是:
(1)本发明能够利用空温式气化器气化过程中产生的积雪的重力作为动力源来实现自动除积雪功能,在空温式气化器底部的积雪重量达到该装置的设定值后,积雪就会被自动弹开至远离空温式气化器基座的其他区域,不会对空温式气化器的气化造成影响,较原来人工铲雪方式有以下几个优点:
a.在气化生产过程中,由于被限定在一定的重量高度内,积雪始终不会接触到气化器进口及底部换热管道,空温式气化器的换热管道始终能与空气接触,并且气化器周边的空气对流也不受影响,从而不会对空温式气化器的气化效果造成影响。
b.解放了劳动力,本装置能自动除雪,无需人员任何操作。
c.降低了人员暴露在气化器周边低温高湿度的工作环境下的频率。
(2)积雪在超过重力预设值时,可利用空温式气化器气化过程中产生的积雪的重力作为动力源来实现自动除积雪功能,若没有超过重力预设值,且在预设时间段内不会超过的,则可以采用加热装置进行加热,使其融化。
附图说明
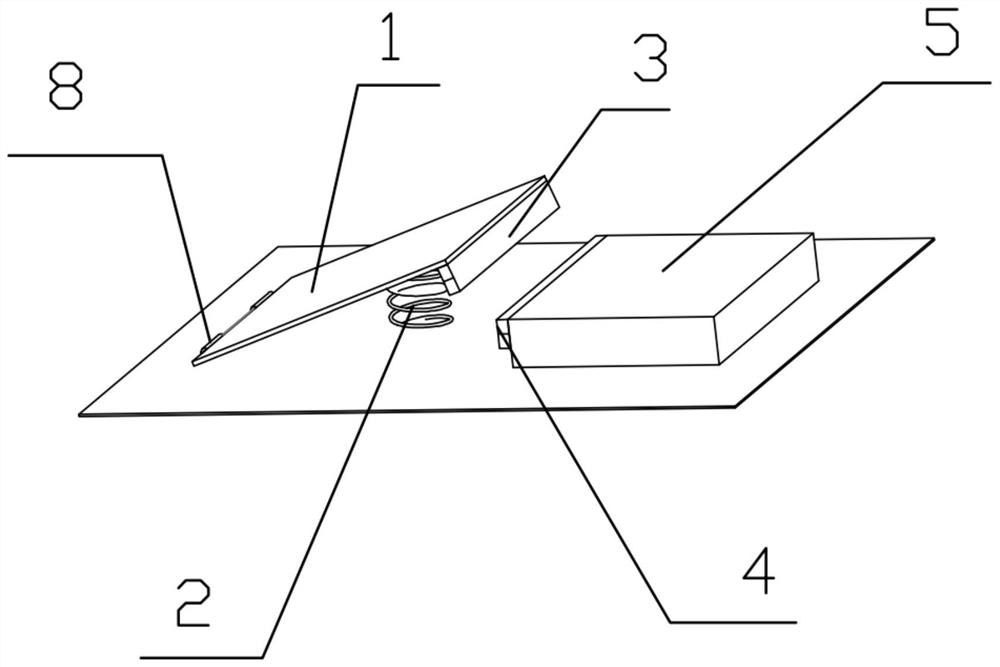
图1为本发明提供的重力式弹簧除积雪装置结构示意图;
图2为本发明提供的弹簧除积雪装置剖视图;
图3为本发明提供的除积雪方法的流程图。
附图标记如下:
1:杠杆平板;2:弹性机构;3:第一磁性组件;4:第二磁性组件;5:空温式气化器;6、加热装置;7:重力传感器;8:旋转轴。
具体实施方式
下面结合附图1-3对本发明做进一步的详细说明。
本发明采用本发明装置最大的不同是能够利用空温式气化器气化过程中产生的积雪的重力作为动力源来实现自动除积雪功能,在空温式气化器底部的积雪重量达到该装置的重力预设值后,积雪就会被自动弹开至远离空温式气化器基座的其他区域,不会对空温式气化器的气化造成影响。
如图1-2所示,具体地,本发明提供了一种重力式弹簧除积雪装置,包括杠杆平板1、弹性机构2、磁性组件和旋转轴8;所述磁性组件包括第一磁性组件3和第二磁性组件4,所述杠杆平板1与旋转轴连接8,杠杆平板1绕旋转轴8活动连接,所述杠杆平板1内侧设置有弹性机构2,所述杠杆平板1内侧的一端设置有第一磁性组件3,所述空温式气化器5上设置有第二磁性组件4,当杠杆平板的第一磁性组件3向第二磁性组4靠近时,此时磁吸力不断增大,直至第一磁性组件3和第二磁性组件4吸在一起,此时磁吸力最大,当杠杆平板1上的第一磁性组件3继续下移,此时磁吸力转化为排斥力。
具体地,本发明提供的第一磁性组件3和第二磁性组件4均包括S极部分和N极部分;S极部分和N极部分设置为一体结构,所述S极部分位于N极部分的上面,当杠杆平板的第一磁性组件的N极部分向第二磁性组件的S极部分靠近时,此时为磁吸力不断增大,当第一磁性组件的N极部分与第二磁性组件的S极部分吸在一起,此时磁吸力最大,杠杆平板上的第一磁性组件继续下移,此时磁吸力就转化为排斥力。其中,本发明提供的第一磁性组件和第二磁性组件包括1个或多个铁磁材料体、导磁材料体;也可为永久磁铁。
其中,积雪是逐步向杠杆平板上掉落的,当积雪逐步掉落到杠杆平板时,积雪的重量逐渐压缩弹性机构,杠杆平板逐渐向下移动,当积雪逐渐增加,第一磁性组件和第二磁性组件不断靠近,磁吸力不断加大,直至第一磁性组件3和第二磁性组件4吸在一起,此时磁吸力最大,当积雪再增多时,积雪的重量迫使杠杆平板上的第一磁性组件3继续下移,此时磁吸力就转化为排斥力,力的方向发生了改变,第一磁性组件3和第二磁性组件4的排斥力与弹性机构2的弹力一起将杠杆平板上的积雪弹至远离空温式气化器的位置。具体地,本发明提供的弹性机构2为压簧弹簧。
工作过程:该装置主要由带弹簧的杠杆平板和2块固定在不同位置的永久磁铁组成。其工作过程为:没有积雪时,弹簧保持自然延伸状态。气化过程中,当积雪逐步掉落到杠杆平面时,积雪的重量逐渐压缩弹簧,杠杆平板逐渐向下移动。当积雪逐渐增加,两块磁铁不断靠近,磁力也不断加大,直至两块磁铁吸在一起,此时磁力最大。当积雪再增多时,积雪的重量迫使平面上的磁铁继续下移,此时磁铁的吸力就转化为斥力,力的方向发生了改变,排斥力与弹簧的弹力一起将平面上的积雪弹至远离气化器基础的位置,如此循环往复,始终控制积雪在一定的高度范围内,避免了积雪对气化器气化效果的影响。
作为优选实施方式,本发明还包括自动控制装置,所述杠杆平板上设置有加热装置6和重力传感器7,所述加热装置6用于加热使积雪融化;所述重力传感器7用于感应积雪的重力,所述自动控制装置与加热装置和重力传感器连接,所述自动控制装置还包括设定模块和判断模块,所述设定模块用于设定重力预设值和预设时间,所述判断模块用于判断重力预设值和重力传感器感应到的积雪的重力的大小,当积雪的重力小于重力预设值,并且在预设时间积雪的重力不再增加,则自动控制装置控制加热装置启动,用于将积雪融化;若积雪的重力在预设时间内不断增加,则加热装置处于关闭状态,当积雪的重力增加到重力预设值时,则积雪的重量迫使杠杆平板上的第一磁性组件继续下移,此时磁吸力就转化为排斥力,力的方向发生了改变,排斥力与弹性机构的弹力一起将杠杆平板上的积雪弹至远离空温式气化器的位置。
其中,本发明提供的自动控制装置还包括计时模块,所述计时模块与重力传感器连接,用于记录重力传感器中积雪的重力不再增加的时长,当重力传感器中积雪的重力不再增加的时长大于预设时间时,则自动控制装置控制加热装置启动。具体地,所述加热装置包括加热层,所述加热层内设置有电热丝。
即,本发明在原有的重力式弹簧除积雪上增加了加热装置6、重力传感器7和自动控制装置,使得在重力预设范围内的积雪也可以通过加热装置进行加热融化,除去部分积雪。
如图3所示,本发明提供了一种重力式弹簧除积雪方法,包括如下步骤:
S1:设定模块设定重力预设值;
S2:实时采集重力传感器的积雪的重力数据,并通过判断模块判断重力预设值和重力传感器感应到的积雪的重力的大小,其中,从积雪下落的开始重力传感器就在采集积雪的重量,即从开始积雪的重力小于重力预设值,计时模块实时记录重力传感器中积雪的重力不再增加的时长,当重力传感器中积雪的重力不再增加的时长大于预设时间时,则认定预设时间内积雪的重力不再增加,从而自动控制装置控制加热装置启动。
当重力传感器中积雪的重力不再增加的时长小于预设时间时,则认定为积雪的重力会持续增加,此时认定积雪的重力有可能达到重力预设值,因此,加热装置处于关闭状态,优选使用积雪的重量使其弹出去的方式除雪,等到积雪的重力达到重力预设值,则积雪的重量迫使杠杆平板上的第一磁性组件继续下移,第一磁性组件与第二磁性组件的磁吸力转化为排斥力,力的方向发生了改变,排斥力与弹性机构的弹力一起将杠杆平板上的积雪弹至远离空温式气化器的位置。
所属领域的普通技术人员应当理解:以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种重力式弹簧除积雪装置
- 一种重力式弹簧除积雪装置