一种场地机器人的位置及其运动路径的监测方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于图像处理技术领域,尤其涉及一种场地机器人的位置及其运动路径的监测方法。
背景技术
割草机器人或安防巡逻机器人等场地机器人的移动在按规划的路径移动时,其实际移动轨迹与设定工作边界或工作路径存在偏差,有时这种误差会产生累积效应产生严重后果,因此有必要对场地机器人的位置及其运动路径进行监测,以便对机器人进行运动状态的纠正。此外,在有多个机器人移动的场地中,如机器人团体对抗赛,及时准确地获取每个机器人的位置和运动路径对于研究并制定对抗策略也是十分必要的。
发明内容
本发明的目的是提供一种场地机器人的位置及其运动路径的监测方法,可以避免巨大计算工作量,能够提高计算速度和监测效率。
为实现上述目的,本发明提供如下的技术方案:
一种场地机器人的位置及其运动路径的监测方法,包括以下步骤:
1)识别每个场地机器人的编号身份;
2)标定拍摄装置的拍摄高度和拍摄姿态;
3)识别拍摄装置拍摄的图像并去畸变矫正;
4)选择原点建立坐标系,根据每个场地机器人的编号身份,识别场地机器人的位置,结合关键帧的前后时间关系,识别场地机器人的运动路径。
进一步地,步骤1)中,识别每个机器人的编号身份时,采用以下方法:
不同的场地机器人顶部设有不同颜色的球形标记物,球形标记物随着场地机器人的移动而移动,通过不同颜色的球形标记物区分不同的场地机器人,并按球形标记物颜色的RGB值给对应的场地机器人排序并进行编号,排序时先按R值由大到小排序,若R值相同的再按G值由大到小排序,若R值、G值都相同,则再按B值由大到小进行排序。
进一步地,步骤2)中,标定拍摄装置的安装高度及垂直倾角时,具体包括:
拍摄装置安放在位于矩形场地长边线中垂线上并位于矩形场地外部,距矩形场地长边线的水平距离为d,高度为H,最大水平视角为ω,垂直倾角为γ
进一步地,所述球形标记物为颜色互不相同的灯珠。
进一步地,步骤3)中,识别拍摄装置拍摄的图像并矫正时,具体包括:
3.1、在拍摄装置拍摄的视频的第一帧处找到矩形场地的四个角并手动设置为基准点,四个基准点按如下方式记录:左下角记作A,右下角记作B,左上角记作C,右上角记作D,此后所有帧都按此方式设置;
3.2、提取视频数据关键帧,获得场地机器人在矩形场地上的位置图像;
3.3、在场地机器人位置图像上,将步骤3.1中所设置的基准点A、B、C、D按AB、AC、BD、CD连接得到一个四边形,再以A为原点,AB边为X轴方向建立平面直角坐标系,令l
3.4、任取四边形内任一像素点P
3.5、在(0-x′
进一步地,步骤4)中,识别场地机器人的位置时,具体包括:
4.1、以AB边中点为原点,AB边为X轴方向建立平面直角坐标系,识别图像中的圆形状及该圆区域内的颜色识别出场地机器人顶部的球形标记物,得到其中心坐标(x,y);
4.2、建立场地机器人顶部的球形标记物与场地机器人的映射关系,则通过球形标记物的位置坐标(x,y)得到场地机器人的实际位置坐标
进一步地,步骤4)中,识别场地机器人的运动路径时,具体包括:
根据关键帧的前后时间关系,增加一个时间轴坐标,用t表示,则不同场地机器人的位置坐标为D
本发明具有的有益效果是:
1、本发明利用固定球形标记物的颜色识别场地机器人,相比利用轮廓特征来识别机器人,可以避免巨大计算工作量,因此能够提高计算速度和监测效率。
2、本发明提供的一种图像去畸变矫正的方法算法简单,有利于控制场地机器人位置图像数据处理规模,从而提高处理速度。
附图说明
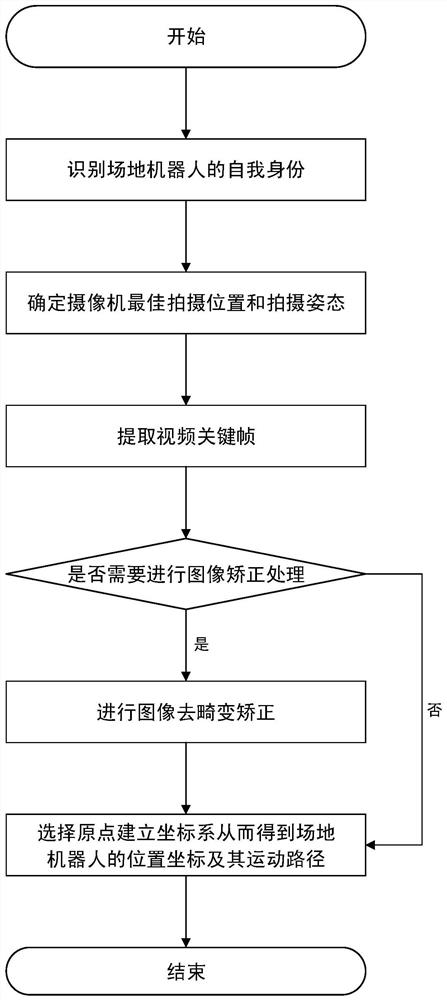
图1为本发明提供的一种场地机器人的位置及其运动路径的监测方法流程图;
图2为图像去畸变矫正处理边角关系辅助说明图。
具体实施方式
现结合附图对本发明作详细的说明:
具体的,本发明提供的一种场地机器人的位置及其运动路径的监测方法,包括以下方面:
参照图1,为本发明提供的一种场地机器人的位置及其运动路径的监测方法流程图,包括以下步骤:在场地机器人身上安装移动光源、确定摄像机的拍摄位置和拍摄姿态、在视频第一帧处设置四个基准点、提取视频关键帧、进行图像去畸变矫正、选择原点建立坐标系,从而得到场地机器人的位置坐标及其运动路径。
如图2为图像去畸变矫正处理边角关系辅助说明图。
具体的,本发明提供的一种场地机器人的位置及其运动路径的监测方法在本实施例中包括以下步骤:
1)现有七台场地机器人,在七个场地机器人上分别安装有一个彩色灯珠
提供七种颜色的彩色灯珠分别安装在场地机器人上,彩色灯珠随着机器人的移动而移动,通过不同颜色的彩色灯珠区分不同的机器人并按灯珠颜色的RGB值的大小顺序给其对应的场地机器人按序编号,排序时先按R值由大到小排序,若R值相同的再按G值由大到小排序,若R值、G值都相同的,再按B值由大到小进行排序,用j(j=1,2,3...7)表示。
2)确定摄像机的拍摄位置和拍摄姿态
识别装置为摄像机,摄像机的安放位置位于矩形场地边线外部并面向矩形场地,距场地边线的水平垂直距离为2米,安装高度为10米,场地机器人顶部球形标记物的高度为1,最大水平视角为160°,垂直倾角为72°,矩形场地的长为100米,宽为50米,摄像机的最大拍摄范围为115×60米,保证摄像机能够拍摄到场地机器人完整的活动区域;
3)在视频第一帧处设置矩形场地的四个角作为基准点
在视频的第一帧处找到矩形场地的四个角并手动设置为基准点,四个基准点按如下方式记录:左下角记作A,右下角记作B,左上角记作C,右上角记作D;
4)提取视频中的关键帧
将得到的视频数据导入计算机后获得视频中的关键图像,即得到场地机器人在不同时间点所在位置的图片;
5)图像去畸变矫正
5.1、由于拍摄位置和角度的影响,如若拍摄所得视频中的矩形活动区域的几何形状产生了一定程度的畸变,则需要先对图像进行去畸变矫正,在步骤3)中所设置的基准点的条件下,连接AB、AC、BD、CD,令l
5.2、任取四边形内任一点P(5000,2000),连接PE、PF,易得到∠AFP=θ
5.3、在去畸变矫正处理的过程中,部分变换后无对应像素点的地方要进行二维插值处理,从而得到完整的无畸变图像。
6)识别机器人的位置及路径并输出
6.1、以AB边中点为原点,AB边为X轴方向建立平面直角坐标系,通过色彩识别出场地机器人顶部的彩色灯珠,得到其中心坐标(x,y);
6.2、建立场地机器人顶部的彩色灯珠与场地机器人的映射关系,则通过灯珠的位置坐标(x,y)得到场地机器人的实际位置坐标
6.3、根据关键帧的前后时间关系,增加一个时间轴坐标,用t(t=1,2,3,...)表示,则不同场地机器人的位置坐标为D
- 一种场地机器人的位置及其运动路径的监测方法
- 一种机器人运动路径显示的方法、装置及机器人