控制装置
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及控制装置。
背景技术
近年来,通过马达来输出行驶用的驱动力的电力机动车正在普及。马达为电气部件,因此其转矩的响应性、线性与通过内燃机来行驶的发动机车辆相比非常高。马达的转矩响应与发动机相比快2个数量级。因此,能够进行稳定的反馈控制,也能够进行在长远来看输出驾驶员要求的转矩的同时、短期地输出车轮打滑了时的调整转矩这样的控制。
另外,马达与发动机相比具有能够准确地掌握输出中的转矩这样的优越性。因此,能够准确地推定从车轮输出着的驱动力,也能够将相关信息利用于牵引控制。
因此,电力机动车的转矩控制与发动机车辆相比能够高精度且高自由度地进行,关于电力机动车的控制,正以与发动机车辆不同的观点推进各种研究。
与此相关联而公开了在车辆安装有车轮速度传感器并将其输出用于速度控制的技术(专利文献1:日本特开2015-056978号公报、专利文献2:日本特开2007-006681号公报)。一般的车轮速度传感器具有在低速区域检测精度降低这样的课题。当车轮速度传感器的检测精度降低时,车轮的打滑率的运算精度也降低,因此难以进行打滑率控制。与此相对,在专利文献2所记载的技术中,鉴于这样的课题,在由马达驱动的驱动轮的速度变得过大的情况下,使用马达的再生转矩来抑制空转。
另外,已知有基于推定车速来控制驱动转矩的技术,所述推定车速通过根据马达的驱动转矩算出推定的车辆速度而得到(专利文献3:日本特开2014-204478号公报)。
然而,在上述专利文献2所记载的技术中,存在如下问题:由于短时间地切换马达的动力运行和再生而会跨经齿轮的齿隙(backlash)区域(零交叉区域),产生噪声、振动从而商品性降低。在上述专利文献3所记载的技术中,存在如下情况:当车辆的速度增加时意外的干扰等计算误差积累,由此控制的精度降低。
发明内容
发明要解决的课题
本发明是考虑这样的情况而完成的,其目的之一在于提供能够在范围更广的速度区域高精度地进行转矩控制的控制装置。
用于解决课题的方案
本发明的控制装置采用了以下的结构。
(1):本发明的一方案的控制装置具备:转矩控制部,其控制马达的转矩,所述马达输出车辆行驶用的驱动力;第一车辆速度取得部,其取得基于所述车辆的车轮的速度得到的第一车辆速度;以及第二车辆速度取得部,其取得基于所述马达输出的转矩得到的第二车辆速度,所述目标转矩决定部基于所述第一车辆速度和所述第二车辆速度中任一方或双方来决定所述目标转矩。
(2):在上述(1)的方案的基础上,所述转矩控制部当作为所述第一车辆速度或所述第二车辆速度的参照速度成为第一阈值以上时,从基于所述第二车辆速度来决定所述马达的转矩的状态切换为基于所述第一车辆速度和所述第二车辆速度这双方来决定所述马达的转矩的状态。
(3):在上述(1)或(2)的方案的基础上,所述控制装置还具备基准车辆速度设定部,该基准车辆速度设定部基于所述第一车辆速度和所述第二车辆速度中任一方或双方来设定基准车辆速度,所述转矩控制部以使所述基准车辆速度与所述第一车辆速度或所述第二车辆速度之差变小的方式决定所述马达的转矩,所述基准车辆速度设定部进行如下处理:基于对所述基准车辆速度与所述第一车辆速度之差、或者所述基准车辆速度与所述第二车辆速度之差进行调整的速度差调整系数,来设定所述基准车辆速度;以根据所述车辆的参照速度增加而一方面减小所述基准车辆速度与所述第一车辆速度之差、另一方面增大所述基准车辆速度与所述第二车辆速度之差的方式设定所述速度差调整系数。
(4):在上述(3)的方案的基础上,所述基准车辆速度设定部以在所述车辆的参照速度处于第一阈值的情况下所述基准车辆速度与所述第二车辆速度之差最小、且在所述车辆的参照速度处于比所述第一阈值大的第二阈值的情况下所述基准车辆速度与所述第一车辆速度之差最小的方式,设定所述速度差调整系数。
(5):在上述(1)至(4)中任一方案的基础上,所述转矩控制部以第一周期决定所述马达的转矩,所述第一车辆速度取得部以比所述第一周期长的第二周期算出所述第一车辆速度。
(6):在上述(4)的方案的基础上,所述第一车辆速度从从动轮取得,所述第二车辆速度从连接所述马达的驱动轮取得,所述转矩控制部以第一周期决定所述马达的转矩,所述第一车辆速度取得部以比所述第一周期长的第二周期算出所述第一车辆速度,所述转矩控制部在所述车辆的参照速度为比所述第二阈值大的第三阈值以上的情况下,基于驱动轮与从动轮之间的速度差来决定所述马达的转矩。
(7):在上述(6)的方案的基础上,所述转矩控制部在所述车辆的参照速度为所述第三阈值以上的情况下,将所述基准车辆速度与所述第一车辆速度之差算出为打滑率,在所述打滑率超过规定值的情况下,所述转矩控制部抑制所述马达的转矩。
根据上述(1)~(7)的方案,能够在范围更广的速度区域中高精度地进行转矩控制。这是因为,对于第一车辆速度与第二车辆速度,精度良好的速度区域不同,因此通过组合精度良好的速度区域,能够进行整体上高精度的转矩控制。另外,即便在车轮速度传感器等的传感器发生故障、传感器输出停止、或者输出了异常值时,也能够用第二车辆速度来代替以往以第一车辆速度进行的控制,能够范围广地活用于马达的控制。
根据上述(2)的方案,当超过车轮速度传感器等的灵敏度良好的第一阈值时,从基于包含计算误差的第二车辆速度来进行转矩控制的状态切换为使用根据车轮速度传感器等而导出的第一车辆速度进行的转矩控制,因此不会使精度恶化,能够以更良好的精度来控制马达。
根据上述(3)的方案,能够抑制在转矩控制的切换时机发生转矩的急剧变化。
根据上述(4)的方案,在车辆的参照速度快要进入高速区域之前的第二阈值处,基准车辆速度切换为第一车辆速度,因此能够防止此后的高速时的转矩急剧变化。
根据上述(5)的方案,以比作为马达的控制周期的第一周期大的第二周期来进行第一车辆速度的算出,由此在转矩控制部中处理的数据较少即可,能够减轻处理负担。
根据上述(6)的方案,在高速区域中,在使用算出周期比马达的控制周期长的第一车辆速度来进行转矩控制的同时进行打滑抑制,因此能够一边减轻处理负担一边进行打滑抑制。需要说明的是,在低速区域中,通过使用第二车辆速度,能够精度良好地进行打滑抑制。
根据上述(7)的方案,在高速区域中,能够在基于驱动轮与从动轮的速度比进行的打滑抑制控制与减小第一车辆速度与第二车辆速度之差的控制之间适宜地切换。
附图说明
图1是表示搭载有控制装置的车辆的结构的一例的图。
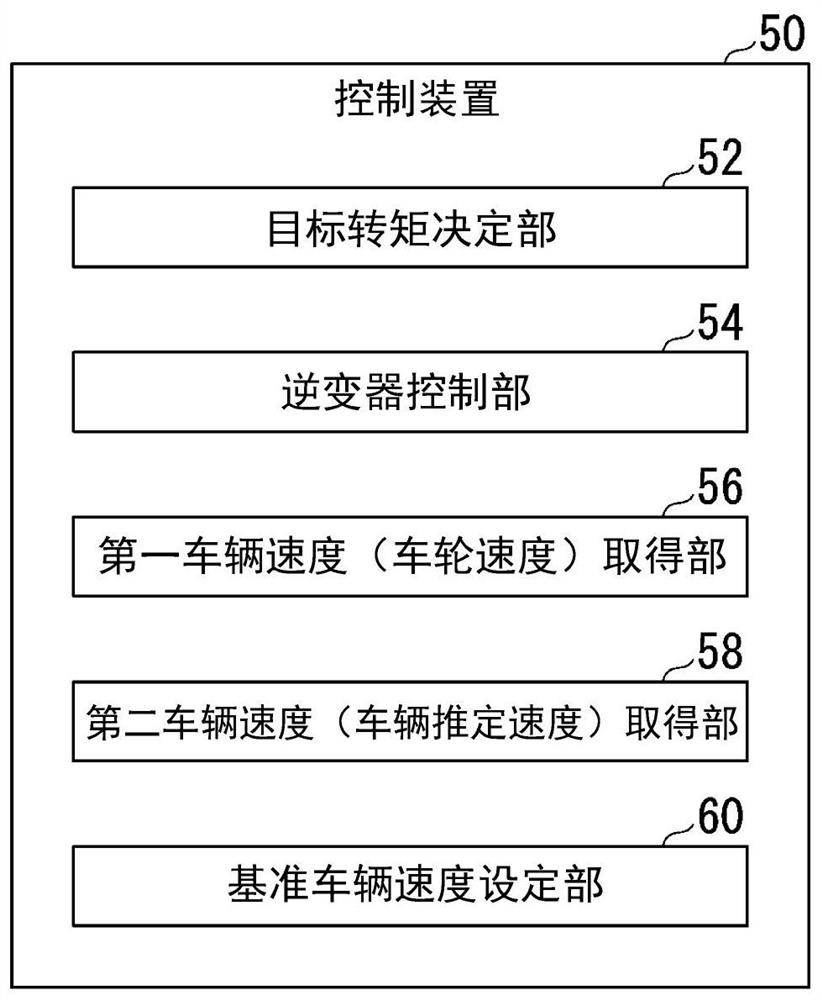
图2是表示控制装置的功能结构的一例的图。
图3是表示由目标转矩决定部决定的反馈转矩的决定处理的概要的流程图。
图4是用于说明车轮速度传感器的灵敏度恶化的现象的图。
图5是用于说明第二车辆速度和使用了该第二车辆速度进行的目标转矩的决定方法的图。
图6是用于说明从第一车辆速度区域向第二车辆速度区域、第三速度区域转移时的基准车辆速度的推移的图。
图7是表示用于决定系数的映射的一例的图。
图8是用于说明由基准车辆速度设定部进行的详细处理的内容的图。
图9是表示在车辆的参照速度处于第四速度区域的情况下由目标转矩决定部执行的处理的内容的一例的流程图。
具体实施方式
以下,参照附图来说明本发明的控制装置的实施方式。图1是表示搭载有控制装置50的车辆M的结构的一例的图。箭头D
在车辆M上,还搭载有马达20、分解器(resolver)22、电流传感器23、齿轮机构24、逆变器26、VCU(Voltage Control Unit)28、二次电池30、充电口32、油门开度传感器40、运算装置45及控制装置50。在图1中,车辆M为插电式的电力机动车,但为主要通过马达输出的动力来对驱动轮进行驱动的类型的车辆即可,控制装置能够也搭载于任何车辆。作为该类型的车辆,可举出燃料电池车辆、混合动力车辆等。在多数情况下,在车辆M上也搭载制动装置、转向装置,但省略关于此的图示及说明。
马达20使用从二次电池经由VCU28及逆变器26而供给来的电力来向车轮10-1及车轮10-2输出驱动力(转矩)。马达20例如是三相交流电动机。马达20的输出轴向齿轮机构24输出。齿轮机构24具备变速功能,将由马达20输出的驱动力向车轮10-1及车轮10-2传递。马达20的输出有时向给车辆M施加加速度的方向进行作用,也有时向给车辆M施加减速度的方向进行作用。分解器22检测用于获知马达20的转速的物理现象,并将检测结果向控制装置50输出。物理现象例如是根据马达20的转子的旋转位置而产生的磁场的变化。一般地,分解器22与车轮速度传感器12相比检测精度和检测速度优异,用于能够以高速响应进行控制的马达控制。电流传感器23为了检测马达20输出的转矩而设置,检测在马达20中流动的电流的量(电流值),并将检测结果向控制装置50输出。
逆变器26将从VCU28供给的直流电力例如变换为三相交流并向马达20输出。VCU28例如是DC-DC转换器。VCU28对二次电池30的输出端子的电压进行升压,并将升压后的电压的电力向逆变器26供给。
关于控制装置50的功能见后述。二次电池30为能够进行充放电的电池。二次电池30例如为锂离子电池。二次电池30经由线缆而与充电口32连接。在充电口32能够装配插头,该插头安装于与车辆M的外部的充电器连接的外部线缆的前端。在插头装配于充电口32的状态下,二次电池30被外部的充电器充电。
油门开度传感器40安装于作为接受由驾驶员作出的加速指示的操作件的一例的油门踏板,用于检测油门踏板的操作量,并将该操作量作为油门开度向控制装置50输出。
运算装置45基于从作为从动轮的车轮10-3及车轮10-4上分别安装的车轮速度传感器12-3及车轮速度传感器12-4分别输入的脉冲信号,来分别算出车轮10-3的速度和车轮10-4的旋转速度,使旋转速度乘以车轮10的设想半径而算出车轮10-3的速度和车轮10-4在道路平面上的速度,并求出算出的道路平面上的速度的平均作为第一车辆速度V1。即,第一车辆速度V1为从动轮的速度(基于车轮的速度得到的速度的一例)。
图2是表示控制装置50的功能结构的一例的图。控制装置50例如具备目标转矩决定部52、逆变器控制部54、第一车辆速度取得部56、第二车辆速度取得部58及基准车辆速度设定部60。目标转矩决定部52为“转矩控制部”的一例。这些构成要素例如通过CPU(CentralProcessing Unit)等硬件处理器执行程序(软件)来实现。另外,这些构成要素中的一部分或全部可以由LSI(Large Scale Integration)、ASIC(Application Specific IntegratedCircuit)、FPGA(Field-Programmable Gate Array)、GPU(Graphics Processing Unit)等硬件(包含电路部:circuitry)来实现,也可以通过软件与硬件的协同配合来实现。
目标转矩决定部52决定马达20应该输出的目标转矩Ttg。目标转矩决定部52例如基于式(1)来决定目标转矩Ttg。在式中,T
Ttg=T
逆变器控制部54控制逆变器26,以便输出由目标转矩决定部52决定的目标转矩Ttg。
目标转矩决定部52在处于车辆M的参照速度(也可以是以下说明的任意的第一车辆速度、第二车辆速度、或者它们的加权和等任意速度)Vref小于第一阈值Vth1的第一车辆速度区域、车辆M的速度为第一阈值Vth1以上且小于第二阈值Vth2的第二车辆速度区域、参照速度Vref为第二阈值Vth2以上且小于第三阈值Vth3的第三速度区域、以及参照速度Vref为第三阈值Vth3以上的第四速度区域中的各速度区域的情况下,按照不同的规则来决定目标转矩Ttg。Vth1<Vth2<Vth3。
图3是表示由目标转矩决定部52决定的反馈转矩T
首先,目标转矩决定部52判定参照速度Vref是否处于第一速度区域(步骤S100)。第一速度区域例如为2~5[km/h]程度的速度区域,是车轮速度传感器12的灵敏度恶化的低速区域。
图4是用于说明车轮速度传感器12的灵敏度恶化的现象的图。图示的与“中~高速区域”和“低速区域”分别对应的脉冲信号表示由车轮速度传感器12输出的脉冲信号。在中~高速区域中,脉冲信号的上升与下降的时间间隔充分小,因此当车辆M的速度变化时脉冲信号的周期(频率)以能够进行检测的程度变化,因此能够高灵敏度地检测车辆M的速度。另一方面,在低速区域中,脉冲信号的上升与下降的时间间隔变长,因此即便在上升与下降之间、或者在下降与上升之间车辆M的速度发了变化,在接下来的上升或下降到来之前也不能得到用于获知速度变化的信息。因此,在低速区域中,可以说车轮速度传感器12的灵敏度恶化。
在判定为参照速度Vref处于第一速度区域的情况下,目标转矩决定部52以使由第二车辆速度取得部58取得的第二车辆速度V2接近基于分解器22的输出得到的速度Vrs(后述的分解器22的输出乘以系数而得到的值)的方式,决定反馈转矩T
在步骤S100中得到了否定性的判定结果的情况下,目标转矩决定部52判定参照速度Vref是否处于第二速度区域(步骤S104)。在判定为参照速度Vref处于第二速度区域的情况下,目标转矩决定部52以使第二车辆速度V2接近由基准车辆速度设定部60设定的基准车辆速度Vstd的方式决定反馈转矩T
在步骤S104中得到了否定性的判定结果的情况下,目标转矩决定部52判定参照速度Vref是否处于第三速度区域(步骤S108)。第三速度区域例如是从第二速度区域的上限(在上述的例子中为10~20[km/h])到20~40[km/h]为止的中速区域。在判定为参照速度Vref处于第三速度区域的情况下,目标转矩决定部52以使第二车辆速度V2接近由基准车辆速度设定部60设定的基准车辆速度Vstd的方式决定反馈转矩T
在步骤S108中得到了否定性的判定结果的情况(即判定为参照速度Vref处于第四速度区域的情况)下,目标转矩决定部52以使第二车辆速度V2接近基准车辆速度Vstd、且当驱动轮与从动轮之间的速度差超过规定值时减少驱动转矩的方式,决定反馈转矩T
第一车辆速度取得部56例如从运算装置45取得第一车辆速度V1。第一车辆速度取得部56作为基于车轮的速度得到的速度的其他例,也可以基于车轴的旋转速度、齿轮机构24中的旋转构件的旋转速度等来取得或求出第一车辆速度V1。另外,第一车辆速度取得部56也可以自行进行与运算装置45同样的运算。
第二车辆速度取得部58基于目标转矩Ttg来取得第二车辆速度V2。以下,一并说明第二车辆速度V2的决定方法和图3中的步骤S102的处理。图5是用于说明第二车辆速度V2和使用了该第二车辆速度V2进行的目标转矩Ttg的决定方法的图。第二车辆速度V2是通过使用了驱动力观测器(observer)的运算而取得的速度。
在对马达20施加了从前馈转矩T
第二车辆速度取得部58将通过从马达传递力F
第二车辆速度取得部58从马达传递力F
第二车辆速度取得部58将驱动力观测值Fd(帽)作为未知的驱动力Fd进行反馈,另一方面,将从驱动力观测值Fd(帽)减去行驶阻力Fload及斜坡阻力Fslope得到的值除以车重M之后进行积分,算出第二车辆速度(车辆推定速度)V2。行驶阻力Fload例如通过将参照速度Vref适用于映射来求出,斜坡阻力Fslope例如通过观察目标转矩Ttg和参照速度Vref的变化来求出。第二车辆速度V2为“基于马达输出的转矩得到的第二车辆速度”的一例。
目标转矩决定部52以使第二车辆速度V2接近作为分解器22的输出的N
图6是用于说明从第一速度区域向第二速度区域、第三速度区域转移时的基准车辆速度的推移的图。在参照速度Vref小于第一阈值Vth1的第一速度区域中,不设定基准车辆速度Vstd(或者即便设定也不用于控制)。关于第四速度区域的控制见后述。
基准车辆速度设定部60当参照速度Vref成为第一阈值以上而进入第二速度区域时,基于式(2)来设定基准车辆速度Vstd。x为取0至1的区间的值的系数(“速度差调整系数”的一例),例如基于图7所示的映射而决定。图7是表示用于决定系数x的映射的一例的图。基准车辆速度设定部60关于系数x,在参照速度Vref与第一阈值Th1一致的情况下对系数x设定1,在参照速度Vref处于第一阈值Th1与第二阈值Th2之间的情况下,以参照速度Vref越接近第一阈值Th1则系数x越接近1、且参照速度Vref越接近第二阈值Th2则系数x越接近0的方式进行设定,在参照速度Vref与第二阈值Th2一致的情况下,对系数x设定0。换言之,基准车辆速度设定部60关于系数x,在参照速度Vref与第一阈值Th1一致的情况下对系数x设定1,在参照速度Vref处于第一阈值Th1与第二阈值Th2之间的情况下,以随着参照速度Vref接近第二阈值Th2而系数x逐渐接近0的方式设定系数x。在图7中,示出为系数x相对于参照速度Vref的变化而呈直线状变化,但也可以是系数x相对于参照速度Vref的变化呈曲线状或阶梯状变化。
Vstd=x×V1+(1-x)×V2…(2)
其结果是,基准车辆速度设定部60关于基准车辆速度Vstd,在参照速度Vref处于第一阈值Th1的情况下对基准车辆速度Vstd设定第二车辆速度V2,在参照速度Vref处于第一阈值Th1与第二阈值Th2之间的情况下,设定第一车辆速度V1与第二车辆速度V2的加权和,该加权和是越接近第二阈值Th2则越提高第一车辆速度V1的比率的加权和,在参照速度Vref处于第二阈值Th2的情况下,对基准车辆速度Vstd设定第一车辆速度V1。
如前述那样,在参照速度Vref小于第一阈值Vth1的第一速度区域中,不设定基准车辆速度Vstd。由此,在车轮速度传感器12的灵敏度差的区域中也使用第二车辆速度,由此能够精度良好地进行控制。另外,在为第二速度区域以上而车轮速度传感器12等传感器发生故障、传感器输出停止或输出了异常值时,能够以第二车辆速度进行代替。基于上述这些原因,能够在范围更广的速度区域高精度地进行转矩控制。这是因为,对于第一车辆速度V1和第二车辆速度V2,精度良好的速度区域不同,因此通过组合精度良好的速度区域而整体上能够进行高精度的转矩控制。
另外,在参照速度Vref处于第一阈值Th1与第二阈值Th2之间的情况下,设定加权和而设定基准车辆速度Vstd,由此能够抑制在转矩控制的切换时机(第一速度区域与第二速度区域之间、以及第二速度区域与第三速度区域之间)发生转矩的急剧变化。另外,在第二速度区域与第三速度区域之间,基准车辆速度Vstd固定为第一车辆速度V1,因此能够防止此后的高速时的转矩急剧变化。
如前述那样,目标转矩决定部52在第二速度区域、第三速度区域及第四速度区域中,以使第二车辆速度V2接近基准车辆速度Vstd的方式决定反馈转矩T
T
这样,目标转矩决定部52当参照速度Vref成为第一阈值Th1以上时,从基于第二车辆速度V2来决定目标转矩Ttg的状态切换为基于第一车辆速度V1和第二车辆速度V2这双方来决定目标转矩Ttg的状态。
基准车辆速度设定部60也可以与CAN通信的接收间隔同步地设定(换言之,变更或切换)在图6及图7中说明的基准车辆速度Vstd的设定所涉及的系数x。控制装置50例如从与油门开度传感器40、车轮速度传感器12连接的运算装置45取得第一车辆速度V1。运算装置与控制装置50之间的通信例如由CAN通信进行。在CAN通信的通信速度合适的情况下,在控制装置50中决定目标转矩Ttg的周期(即马达20的控制周期)比第一车辆速度V1的取得周期短。换言之,第一车辆速度V1的取得周期比马达20的控制周期长。因此,基准车辆速度设定部60进行以下说明的处理。
图8是用于说明由基准车辆速度设定部60进行的详细处理的内容的图。来自车轮速度传感器12的脉冲信号(脉冲数)以CAN通信的接收间隔(规定间隔的一例)向控制装置50输入。第一车辆速度取得部56根据将脉冲信号输入而算出第一车辆速度。该CAN通信的接收间隔例如为30~60[ms]程度(“第二周期”的一例),比马达20的控制周期(例如3~8[ms];“第一周期”的一例)长。目标转矩的决定配合马达20的控制周期而进行。基准车辆速度设定部60如图所示,在CAN通信的接收间隔的期间使系数x固定,每当通过CAN通信接收到脉冲信号时,再次计算系数x。通过以利用该系数x弥补比CAN通信的接收间隔短的间隔的方式进行计算,能够与通常按马达20的每个控制周期而基于参照速度来进行计算相比减少计算负荷。即,通过以比作为马达20的控制周期的第一周期大的第二周期进行第一车辆速度V1的算出,从而在目标转矩决定部52中处理的数据较少即可,能够减轻处理负担。
说明第四速度区域中的控制。在第四速度区域中,目标转矩决定部52计算基于从动轮与驱动轮之间的速度差得到的打滑率,反映用于打滑抑制的成分而决定目标转矩Ttg。目标转矩决定部52将第一车辆速度V1作为从动轮的速度、将基准车辆速度Vstd(在第四速度区域中与第二车辆速度V2一致)作为驱动轮的速度来进行以下的计算。目标转矩决定部52如式(4)所示,算出第一车辆速度V1与基准车辆速度Vstd之比作为打滑率γ。
γ=Vref/{1-(Vstd-V2)}…(4)
目标转矩决定部52在打滑率γ超过规定值A1的情况下,代替在式(3)之说明的反馈转矩T
T
图9是表示在车辆M的参照速度Vref处于第四速度区域的情况下,由目标转矩决定部52执行的处理的内容的一例的流程图。本流程图的处理更详细地示出图3的步骤S112的处理的内容。
目标转矩决定部52基于第一车辆速度V1和基准车辆速度Vstd来算出打滑率γ(步骤S200),判定打滑率γ是否超过规定值A1(步骤S202)。目标转矩决定部52在打滑率γ超过规定值A1的情况下,基于打滑率γ来决定反馈转矩T
通过这样的处理,在作为高速区域的第四速度区域中,在使用算出周期比马达的控制周期长的第一车辆速度V1进行转矩控制的同时,进行打滑抑制,因此能够一边减轻目标转矩决定部52中的处理负担,一边进行打滑抑制。需要说明的是,在作为低速区域的第一速度区域中,通过使用第二车辆速度V2,能够精度良好地进行打滑抑制。
根据以上说明的实施方式的控制装置,具备:目标转矩决定部52,其决定对马达20施加的目标转矩Ttg,所述马达20输出车辆M行驶用的驱动力;第一车辆速度取得部56,其取得基于车辆M的车轮的速度得到的第一车辆速度V1;以及第二车辆速度取得部58,其基于马达20输出的转矩来决定第二车辆速度V2,目标转矩决定部52基于第一车辆速度V1和第二车辆速度V2中任一方或双方来决定目标转矩Ttg,因此能够在范围更广的速度区域中高精度地进行转矩控制。即,即便在车轮速度传感器12的灵敏度差的第一速度区域中,通过使用第二车辆速度,也能够精度良好地进行控制,若为第二速度区域以上,则在车轮速度传感器12等传感器发生故障、传感器输出停止、或者输出了异常值时,能够用第二车辆速度代替。对于第一车辆速度V1与第二车辆速度V2,精度良好的速度区域不同,因此通过组合精度良好的速度区域,能够进行整体上高精度的转矩控制。
使用实施方式说明了本发明的具体实施方式,但本发明丝毫不被这样的实施方式限定,在不脱离本发明的主旨的范围内能够施加各种变形及替换。
- 控制装置、控制装置的控制程序、控制装置的控制方法、控制系统、终端装置、以及被控制装置
- 机动车辆的控制装置组合的运行控制装置和用于运行控制装置的方法