一种捷联惯导/多普勒组合导航系统的导航方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明属于组合导航技术领域,具体涉及一种捷联惯导/多普勒组合导航系统的导航方法。
背景技术
目前,可用于水下导航的手段仍然比较有限。水下航行器的导航系统必须具有远程、长航时、高精度的导航能力。捷联惯导/多普勒(Strapdown Inertial NavigationSystem/Doppler Velocity Log,SINS/DVL)组合导航是目前实现水下自主导航的主要方式之一。
多普勒是利用安装在载体上的超声换能器向海底发射超声波,并根据多普勒效应原理测量载体速度的仪器,原理如附图1所示。在实际应用中,由于复杂的水下地形、鱼群干扰、多普勒测速仪超量程等因素,可能会出现多普勒测速仪失效的情况。如何实现多普勒失效条件下导航精度的维持是一个有待于进一步研究的问题。
针对该问题,通常采用的方式是建立水下航行器的运动学模型,在多普勒失效的条件下,利用运动学模型提供虚拟的速度观测值,并进行组合导航。该方式通常假设载体处于匀速或者匀加速状态,与载体的实际运动状态有一定的差异,因此预测精度不高。
发明内容
本发明提供了一种捷联惯导/多普勒组合导航系统的导航方法,用以解决现有技术中组合导航预测精度不高的问题。
为解决上述技术问题,本发明所包括的技术方案以及技术方案对应的有益效果如下:
本发明提供了一种捷联惯导/多普勒组合导航系统的导航方法,包括如下步骤:
1)在捷联惯导/多普勒组合导航系统工作时,判断多普勒是否失效:
2)若多普勒失效且多普勒失效时刻大于设定值,则将多普勒失效时刻和前m个时刻的模型输入、以及多普勒失效时刻和前m个时刻的多普勒输出速度输入至训练好的多普勒预测模型中,预测得到下一时刻多普勒输出速度,m>1;并利用预测得到的多普勒输出速度进行组合导航;
其中,所述模型输入为捷联惯导/多普勒组合导航系统输出的方向余弦矩阵
上述技术方案的有益效果为:本发明在多普勒有效的情况下,利用组合导航系统的数据以及多普勒输出速度对多普勒预测模型进行训练,从而使得在多普勒失效后,利用多普勒预测模型便可预测得到多普勒输出速度,保证导航数据不间断,短期维持组合导航系统的精度。而且,本发明的多普勒预测模型的输入为利用SINS/DVL组合导航得到在载体系下的速度,输出为多普勒载体系下的速度,二者同为速度序列,由SINS/DVL组合导航得到的速度能在一定程度上反映多普勒速度的变化趋势,从而提高预测的精度。
进一步的,步骤2)中,所述多普勒预测模型为神经网络模型。
进一步的,为了对多普勒输出速度进行准确预测,所述神经网络模型为非线性自回归神经网络模型。
进一步的,所述捷联惯导/多普勒组合导航系统中的惯性导航系统的误差速度方程、姿态误差方程为:
其中,δv为速度误差,
进一步的,所述捷联惯导/多普勒组合导航系统所选取的状态变量为:
其中,δv
进一步的,所述捷联惯导/多普勒组合导航系统的观测方程为:
其中,z表示观测量;
进一步的,为了保证预测精度的同时保证运算效率,步骤2)中,m=3。
进一步的,为了保证组合导航系统输出精度,若步骤1)的判断结果为多普勒失效且多普勒失效时刻小于或者等于设定值,则所述捷联惯导/多普勒组合导航系统转入纯惯性导航状态,并在多普勒失效修复后进入组合导航状态。
进一步的,所述非线性自回归神经网络模型包括输入层、隐藏层和输出层,所述隐藏层的激活函数为ReLU函数,所述输出层的激活函数为线性函数。
附图说明
图1是本发明的多普勒工作原理示意图;
图2是本发明的SINS/DVL组合导航结构图;
图3是本发明的NARX神经网络模型结构结构图;
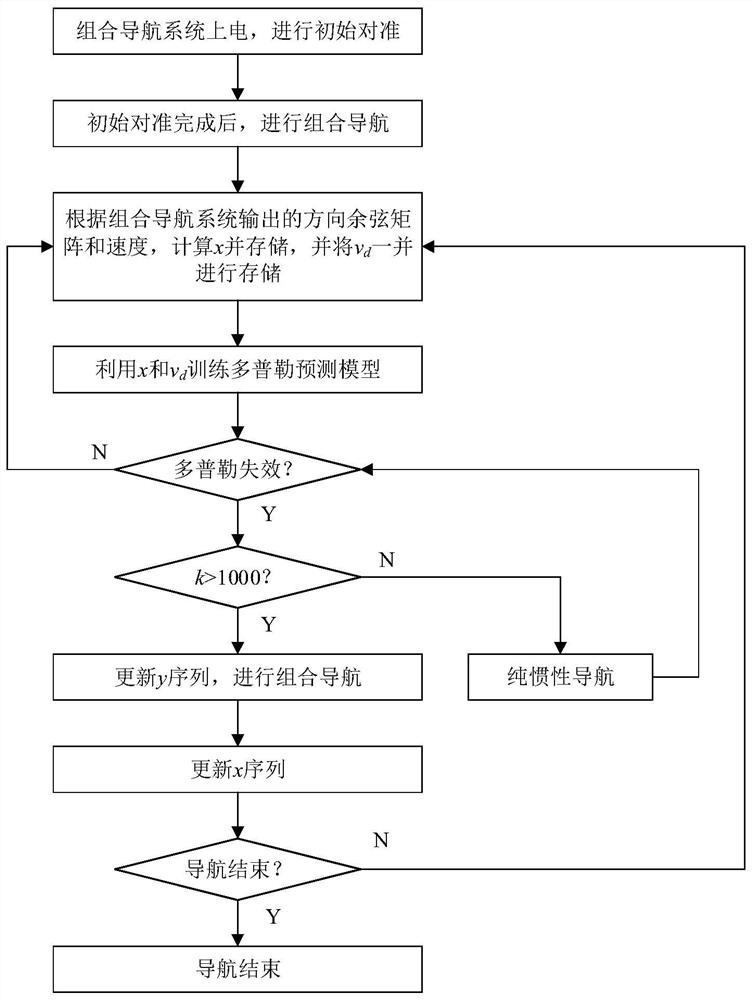
图4是本发明的方法流程图。
具体实施方式
本发明的基本构思为:在多普勒有效时,利用捷联惯导/多普勒组合导航系统(以下称为SINS/DVL组合导航系统或者组合导航系统)及多普勒输出的数据来训练多普勒预测模型,在多普勒失效时接入训练好的多普勒预测模型,利用训练好的多普勒预测模型来预测多普勒输出数据,并用该预测出的数据与惯性导航系统组合导航,保证导航数据不间断,维持组合导航的精度。下面结合附图及实施例,对本发明的一种捷联惯导/多普勒组合导航系统的导航方法进行详细说明。
方法实施例:
实施本发明的一种捷联惯导/多普勒组合导航系统的导航方法前,先对SINS/DVL组合导航系统进行介绍。
SINS/DVL组合导航系统的具体结构图附图2所示,即用DVL输出的速度信息辅助惯导进行组合导航。DVL输出的速度经惯导系统的姿态转换到导航坐标系,与惯导输出的速度信息的之差作为量测值,经卡尔曼滤波,估计组合导航系统的状态,并对惯导系统进行校正。
组合导航系统首先要建立系统的组合导航模型,即状态方程与观测方程,本发明建立的组合导航模型如下:
1)状态方程。
选取北-东-地(North-East-Down,NED)地理坐标系为导航系,并记作n。惯性导航系统的误差速度方程、姿态误差方程可以表示为:
其中,δv为速度误差,
SINS/DVL组合导航系统选取的状态变量为:
其中,δv
根据式(1)、(2)可列出组合导航系统的状态方程为:
其中,F为状态转移矩阵;w为高斯白噪声。
2)观测方程。
以惯性导航系统与多普勒测速仪的速度之差作为组合导航的观测量,即:
其中,z表示观测量;
其中,
建立SINS/DVL组合导航系统的观测方程如下:
其中,η为零均值高斯白噪声;H为观测矩阵,且:
其中,I
3)神经网络模型辅助SINS/DVL组合导航算法。
本实施例中的多普勒预测模型采用神经网络模型,神经网络模型的输入与输出的映射关系为:
其中,M(·)为非线性映射函数;y(k+1)为神经网络模型的输出;m为输入时延的阶数;y(k)、y(k-1)、y(k-m)分别为k时刻、k-1时刻、k-m时刻神经网络模型的输出;x(k)、x(k-1)、x(k-m)分别为k时刻、k-1时刻、k-m时刻的模型输入,且定义模型输入x(k)为:
其中,
y(k)=v
其中,v
则神经网络模型的输出y(k+1)为k+1时刻多普勒输出速度。也就是说,神经网络模型训练完成后,利用k-m时刻到k时刻组合导航系统的数据
具体的,神经网络模型可选用非线性自回归(Nonlinear autoregressiveexogenous,NARX)神经网络模型,其具体结构如附图3所示,包括输入层、隐藏层和输出层。W是神经网络模型中需要进行自适应调节的连接权重;B为偏置;F1为隐藏层的激活函数,选用非线性函数ReLU函数;F2为输出层的激活函数,选用线性函数;输入层输入变量的个数为6个(此处为6个是因为x和y都是3维的速度序列,6为二者相加的个数),分别对应了x(k)和y(k);输入层的最大延迟阶数为3;隐藏层神经元数目为10;输出层的神经元数目为3,对应输出k+1时刻多普勒输出速度;神经网络模型采用Adam优化算法进行优化。
在介绍完上述内容后,下面结合图4对整个组合导航过程(即本发明的一种捷联惯导/多普勒组合导航系统的导航方法)进行说明,其中,输入时延的阶数m取值为3。
步骤一,SINS/DVL组合导航系统上电启动,进行初始对准。
步骤二,初始对准完成之后,SINS/DVL组合导航系统在进入组合导航状态,组合导航的模型如公式(4)、(7)所示。
步骤三,根据SINS/DVL组合导航系统输出的方向余弦矩阵
步骤四,利用步骤三存储的x序列和y序列训练NARX神经网络模型,NARX神经网络模型如图3所示,以得到训练好的NARX神经网络模型(即训练好的多普勒预测模型)。
步骤五,判断多普勒是否失效:
若多普勒失效且k>1000,则将x(k)、x(k-1)、x(k-2)、x(k-3)与y(k)、y(k-1)、y(k-2)、y(k-3)输入至训练好的多普勒预测模型中,得到y(k+1),即下一时刻多普勒输出速度;
若多普勒失效但k≤1000,则SINS/DVL组合导航系统转入纯惯性导航状态,并在多普勒失效修复后转到步骤三;
若多普勒没有失效,则转到步骤三。
需说明的是,该步骤中的k可以指代多普勒失效时刻,在判断条件中还加入了k与1000的比较判断是因为,在k≤1000的情况下,说明送入NARX神经网络模型进行训练的数据较少,那么NARX神经网络模型的预测精度可能会较低,为了保证导航精度,在k≤1000的情况下转入纯惯性导航状态,仅在k>1000的情况下才使用NARX神经网络模型预测结果。
步骤六,以步骤五预测得到的多普勒输出速度更新y序列,并以预测得到的多普勒输出速度进行SINS/DVL组合导航。
步骤七,根据步骤六得到的组合导航结果以及公式(10),更新x序列;并转至步骤五进行重复判断。
步骤八,SINS/DVL组合导航系统导航结束,SINS/DVL组合系统停止工作。
该方法具有如下效果:1)本发明可以在多普勒失效情况下维持或者短期维持惯导/多普勒组合导航系统的精度;2)有效利用了组合导航系统的数据及多普勒的数据进行神经网络的训练,提高了多普勒速度序列的预测精度。
本实施例中,多普勒预测模型选用非线性自回归神经网络模型。作为其他实施方式,还可选用现有技术中的其他模型,例如卷积神经网络模型。