一种精确定位的真空压力调节阀门
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及真空压力调节阀门的处理技术领域,更具体的是涉及一种精确定位的真空压力调节阀门技术领域。
背景技术
真空压力调节阀是一种用于改变真空管道流导的阀门,通过对管道流量大小的控制起到调节真空腔室压力的作用,更进一步地说,真空压力调节阀通过改变阀门开度大小来改变管道的流导,控制了管道的流量大小就控制了真空腔室的压力大小,或者使真空压力保持动态平衡,因而它是一种重要的、使用要求较高的真空元件。
现有技术中的真空压力调节阀门中,通常使用步进电机通过螺纹传动驱动阀芯运动,使阀板停留在阀口的所需位置上,从而控制管道的流导,对真空压力起到调节作用,类似的调节结构问题重重,一是由于执行器的运动行程短而阀芯行程大,传动比较大(通常1:5~6),使得阀芯的定位误差因执行器的运动误差而被放大5-6倍,很难将阀板停靠在所需调控流导的位置处;其次,由于在真空系统中压力调节频率极高,螺纹传动机构很容易被磨损,在短时间调节精度便快速下降,使用寿命较短。
综上,现有技术中真空压力调节阀门存在调节精度低和使用寿命短的问题。为解决该问题,我们提出了一种精确定位的真空压力调节阀门。
发明内容
本发明的目的在于:为了解决现有技术中真空压力调节阀门存在调节精度低和使用寿命短的问题,本发明提供一种精确定位的真空压力调节阀门,旋转电机的输出轴带动调节滚轮在调节滑槽内滑动,通过单一的摆臂摆动直接地驱动阀芯运动,减少了传动部件,与螺纹传动结构相比,这种结构提高了该阀门的传动效率和并实现阀芯的精确定位,不需要通过螺纹传动,从而使该结构的磨损更小、使用寿命更长。
本发明为了实现上述目的具体采用以下技术方案:
一种精确定位的真空压力调节阀门,包括壳体,所述壳体上开有阀口,所述壳体上安装有旋转电机,所述旋转电机的输出轴上连接有摆臂,所述摆臂的端部连接有连接轴,所述连接轴上安装有调节滚轮,所述调节滚轮连接有连接板,所述连接板上沿其宽度方向开有调节滑槽,所述调节滚轮位于调节滑槽内且可沿调节滑槽滑动,所述连接板上连接有阀芯,所述阀芯的顶面和底面均连接有阀板,所述阀芯的两侧均安装有与壳体连接的滑动机构,所述阀芯通过滑动机构可沿壳体的长度方向滑动。
滑动机构的优选结构为:所述滑动机构包括安装在壳体内的导轨,所述阀芯的侧面安装有滑动滚轮,所述滑动滚轮与导轨接触且可沿导轨滑动。
优选的,所述连接板的端面上开有卡接槽,所述阀芯通过卡接槽与连接板连接。
优选的,所述连接板上还开有减重通槽。
优选的,所述调节滑槽包括从左到右依次连通的第一半圆槽、条形槽和第二半圆槽。
优选的,所述摆臂上开有对穿孔,所述连接轴通过穿过对穿孔的连接件与摆臂连接,所述摆臂上还开有与对穿孔连通的轴孔,所述连接轴安装在轴孔内。
优选的,所述轴孔呈半圆形。
优选的,所述壳体的顶面和底面还均安装有法兰,所述壳体上安装有加强筋。
进一步的,所述旋转电机的输出轴上还安装有角度编码器。
优选的,所述壳体上还安装有底板,所述底板上安装有转接板,所述旋转电机安装在转接板上。
本发明的有益效果如下:
(1)本发明中旋转电机的输出轴带动调节滚轮在调节滑槽内滑动,通过单一的摆臂摆动直接地驱动阀芯运动,减少了传动部件,与螺纹传动结构相比,这种结构提高了传动效率和定位精度,不需要通过螺纹传动,从而使该结构的磨损更小、使用寿命更长。
(2)本发明中当连接板、阀芯在摆臂的推动下沿着壳体的长度方向移动时,安装在阀芯两侧的滑动滚轮会沿着导轨滑动,这样阀芯与壳体间的接触就是滚动接触,产生滚动摩擦,这样可以极大的减少对阀芯的磨损,从而有助于提高该阀门的使用寿命。
(3)本发明中连接板上还开有减重通槽,这样可以极大减少连接板的重量,从而可以降低该阀门重量,同时更加有利于对阀芯的安装,确保调节滚轮始终在调节滑槽内保持稳定的位置运动。
(4)本发明中电机输出轴上采用高精度的角度编码器,能精确地跟踪和反馈阀板的停靠位置,从而可以进一步提高对阀板位置的控制精度,进而进一步的提高了该阀门的传动效率和定位精度。
附图说明
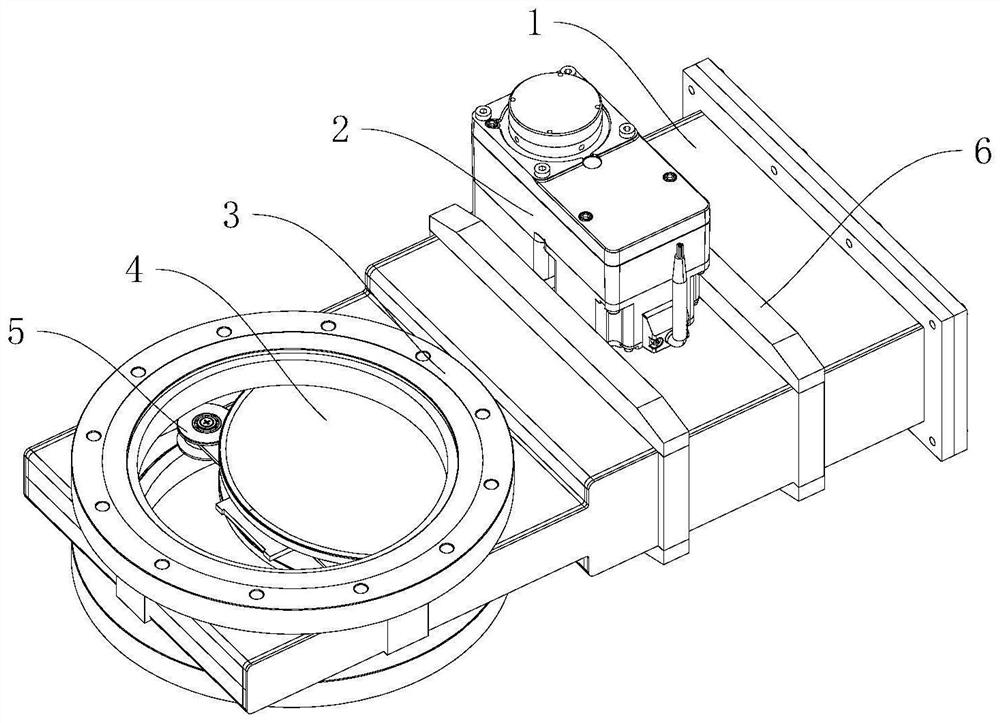
图1为本发明的立体结构简图;
图2为本发明除去壳体后的立体结构简图;
图3为本发明除去壳体、筏板后的立体结构简图;
图4为本发明的侧面剖视结构简图;
图5为本发明阀口未完全打开时的正面剖视结构简图;
图6为本发明阀口完全打开时的正面剖视结构简图;
图7为本发明连接板的立体结构简图;
图8为本发明连接板的俯视结构简图;
图9为本发明输出轴、摆臂和连接轴的立体结构简图;
图10为本发明旋转电机、角度编码器等连接的正面局部剖视结构简图;
图11为本发明摆臂的正面局部剖视结构简图;
附图标记:1壳体,2旋转电机,3法兰,4阀板,5滑动滚轮,6加强筋,7导轨,8连接板,81调节滑槽,811第一半圆槽,812条形槽,813第二半圆槽,82减重通槽,83卡接槽,9连接轴,10调节滚轮,11摆臂,111对穿孔,112轴孔,12输出轴,13阀芯,14角度编码器,15阀口,16底板,17转接板。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
实施例1
如图1-图9所示,本实施例提供一种精确定位的真空压力调节阀门,包括壳体1,壳体1上开有阀口15,壳体1上安装有旋转电机2,旋转电机2的输出轴12上连接有摆臂11,摆臂11的端部连接有连接轴9,连接轴9上安装有调节滚轮10,调节滚轮10连接有连接板8,连接板8上沿其宽度方向开有调节滑槽81,调节滚轮10位于调节滑槽81内且可沿调节滑槽81滑动,连接板8上连接有阀芯13,阀芯13的顶面和底面均连接有阀板4,阀芯13的两侧均安装有与壳体1连接的滑动机构,阀芯13通过滑动机构可沿壳体1的长度方向滑动,其中,旋转电机2可以选择L型直流无刷减速电机。
优选的,连接板8上还开有减重通槽82,这样可以极大减少连接板8的重量,从而可以降低该阀门的重量,同时更加有利于对阀芯13的安装,确保调节滚轮10始终在调节滑槽81内保持稳定的位置运动,减重通槽82可以设置为椭圆形,这样更美观。
优选的,调节滑槽81包括从左到右依次连通的第一半圆槽811、条形槽812和第二半圆槽813,这样更有助于调节滚轮10在调节滑槽81内滑动。
优选的,如图11所示,摆臂11上开有对穿孔111,连接轴9通过穿过对穿孔111的连接件与摆臂11连接,摆臂11上还开有与对穿孔111连通的轴孔112,连接轴9安装在轴孔112内,轴孔112呈半圆形,这样更加有利于连接轴9与摆臂11连接,其中连接件可以为螺钉等,连接件与对穿孔111通过螺纹连接,而且半圆形的轴孔112可以确保连接轴9与摆臂11无轴向和径向的滑动,从而提高了传动的精密性。
优选的,壳体1的顶面和底面还均安装有法兰3,壳体1上安装有加强筋6,壳体1的一部分被夹在两个法兰3之间,这样可以使该阀门更加紧凑,更加稳固,加强筋6的设置可以减小壳体1在真空状态下的变形,使壳体1的变形不影响输出轴12的密封和运动,确保的传动的稳定性和顺畅性;在两个阀板4上开有球窝,通过多个钢球套穿过阀芯13,并在钢球套内的两端安装有钢球,钢球位于球窝内,这样即可将阀板4和阀芯13连接起来。
工作原理:当需要关闭该阀门时,通过常规的方式使旋转电机2旋转,旋转电机2通过常规的方式带动输出轴12旋转,输出轴12再带动调节滚轮10沿着调节滑槽81滚动,当调节滚轮10在调节滑槽81内滚动时,会给连接板8一个向阀芯13方向的力,连接板8受到该力后开始带动阀芯13和阀板4沿着壳体1的长度方向移动,直到将阀口15封闭住后旋转电机2停止旋转;
当需要打开该阀门时,通过常规的方式使旋转电机2向相反的方向旋转,旋转电机2带动输出轴12旋转,输出轴12再带动调节滚轮10沿着调节滑槽81滚动,当调节滚轮10在调节滑槽81内滚动时,会给连接板8一个远离阀芯13方向的力,连接板8受到该力后开始带动阀芯13和阀板4沿着壳体1的长度方向向回移动,直到将阀口15打开到想要的程度后旋转电机2停止旋转;如此旋转电机2的输出轴12带动调节滚轮10在调节滑槽81内滑动,通过单一的摆臂11摆动直接地驱动阀芯13运动,减少了传动部件,与螺纹传动结构相比,这种结构提高了传动效率和定位精度,不需要通过螺纹传动,从而使该结构的磨损更小、使用寿命更长。
实施例2
如图1-图9所示,在实施例1的基础上,本实施例给出了滑动机构的优选结构为:滑动机构包括安装在壳体1内的导轨7,阀芯13的侧面安装有滑动滚轮5,滑动滚轮5与导轨7接触且可沿导轨7滑动。
本实施例中:当连接板8、阀芯13在摆臂11的推动下沿着壳体1的长度方向移动时,安装在阀芯13两侧的滑动滚轮5会沿着导轨7滑动,这样阀芯13与壳体1间的就是滚动接触,产生滚动摩擦,这样可以极大的减少对阀芯13的磨损,从而有助于提高该阀门的使用寿命,滑动滚轮5沿着导轨7的运动属于长寿命的滚动位移,有力地保证了在真空压力调节时阀板4在任意位置不停地来回摆动的使用要求。
优选的,连接板8的端面上开有卡接槽83,阀芯13通过卡接槽83与连接板8连接,在连接板8上还可以开设通孔,当阀芯13卡设在卡接槽83内后,再通过穿过通孔和阀芯13的螺钉将阀芯13和连接板8固定起来,这样更加便于连接板8和阀芯13的连接。
实施例3
如图1-图10所示,在实施例1的基础上,本实施例给出了可以进一步提高对阀板4位置控制精度的优选结构,即旋转电机2的输出轴12上还安装有角度编码器14。
壳体1上还安装有底板16,底板16上安装有转接板17,旋转电机2安装在转接板17上。底板16可以直接焊接在壳体1上,底板16和转接板17上均安装有轴承,实现对输出轴12的固定安装和轴向定位,确保输出轴12的轴向固定,转接板17用于对L型的旋转电机2的固定,同时在转接板17上设有密封圈,从而可以实现输出轴12在运动过程中的动密封。
角度编码器14可以选择绝对值编码器,角度编码器14安装在输出轴12的一端,能精确的跟踪和反馈摆臂11的旋转位置,旋转电机2运转时,输出轴12带动摆臂11和角度编码器14转动,于是摆臂11的任何转动角度均会精确地反馈在角度编码器14上,角度编码器14的位置反馈功能和单一的滑动连接结构使得本发明阀板4的位置定位精度能达到0.1%FS(FS为全量程),当摆臂11的转动角度对应着阀芯13的直线运动位置,也对应着阀口15开度的大小,又因摆臂11的摆动量实时被角度编码器14跟踪记录,且摆动量与角度编码器14的旋转角度是一一对应的,因此对真空压力大小控制起决定作用的阀口15开度被精确地控制,因为角度编码器14直接连接在输出轴12上,所以旋转电机2的传动误差不影响摆臂11的位置检测,从而可以进一步的提高该阀门的传动效率和定位精度。