一种航空三级式电机软起动、软脱开控制方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于航空三级式同步电机技术领域,具体涉及一种基于精确转矩控制的航空三级式电机软起动、软脱开控制方法。
背景技术
航空发动机负载力矩大、转动惯量高、要求脱开转速高。电励磁交流起动发电系统在我国航空领域研究应用较少,现有较成熟控制方案为基于转速、转矩角闭环的起动控制方法,该控制方法使用目标转速作为控制基础,对于负载特性变化不大的航空发动机具有一定优势,可采用持续增大占空比加大带载能力完成发动机起动。
a)现有技术在起动时刻无法精确控制转矩,易造成电机轴端冲击。对于采用转速、转矩角闭环控制策略的起动系统,电机输出力矩无法预测,受常温、低温天气的影响,发动机负载或大或小,在不同情况下,起动发电机输出力矩将发生变化,无法实现精确力矩控制;
b)现有技术在电机脱开时,无法精确控制脱开转矩将导致发动机脱开时传动轴产生转矩冲击,缩短电机轴使用寿命;
c)恒加速度控制对电机与发动机轴使用寿命较友好,但是在低温天发动机负载较重时,若持续按照设定加速度控制输出时,容易产生控制器过流故障。
发明内容
要解决的技术问题:
为了避免现有技术的不足之处,本发明提供一种基于精确转矩控制的航空三级式电机软起动、软脱开控制方法,能够实现发动机起动过程中精确转矩控制、达到起动和脱开时刻无力矩冲击、增强起动系统可靠性。
本发明的技术方案是:一种航空三级式电机软起动、软脱开控制方法,具体步骤如下:
步骤1:识别起动指令;
步骤2:接通励磁回路,测量电机转速;
步骤3:依据设定的转速—转矩曲线查找转矩给定值T
式中,k
a)判断当前转速,若转速<设定软起转速:
式中,n表示当前转速,time表示在嵌入式系统中离散化的时间,按周期累加;i
b)若转速<设定的分段转速n1:
式中,T
c)若转速<设定的分段转速n2:
式中,T
d)恒功率阶段电流给定,当电机转速达到恒功率段时,电流给定方式按如下公式,
式中,n_mp表示恒功率点转速,T_mp表示恒功率点转矩,n_final表示脱开转速;
e)达到脱开转速n_final后电流给定方式:
当转速达到脱开转速后,为避免电机立即停止输出后,电机轴与发动机传动轴相互磕碰,造成过大转矩震荡,控制电机输出力矩缓慢下降,且下降方式可通过上位机调整;
iq_final=n_mp×T_mp×k
式中,time'表示脱开力矩控制计数器,n_final表示脱开转速,k'表示脱开斜率,k'×time'表示每个离散量周期,给定i
步骤4:采集电机转子位置、主电机三相电流,进行Clark和Park坐标变换,得到两相旋转坐标系下交、直轴电流,其中Clark变换采用恒幅值变换,表示如下式所示;
式中,u
u
u
i
i
i
步骤5:将id、iq环路给定值与反馈值作差后,经PI控制器进行调节,输出得到u
式中,error
步骤6:得到电压给定值ud'、uq'后,进行反Park变换,得到两相静止坐标系下电压,变换公式如下:
式中,u
步骤7:将得到的两相静止坐标系下电压u
本发明的进一步技术方案是:所述步骤3中,通过对励磁电流进行实时检测,在满足理论值5A+-1A范围时,认为励磁回路接通。
有益效果
本发明的有益效果在于:本发明主要应用于航空发动机起动控制领域,航空发动机造价昂贵,在发动机起动过程中,本发明可保护起动系统输出力矩在发动机转轴可承受范围内平滑变化,减小起动、脱开阶段所产生的力矩冲击,可将起动时刻转矩超调由100%下降到10%,脱开时刻转矩冲击降低3倍。
相比于常规航空发动机起动系统,如空气涡轮起动、直流电机起动、普通变频交流起动系统,本发明所设计的控制方式在解决冲击转矩方面具有控制精度高、速度快的特点,实现的根本原理在于降低发动机轴端力矩的上升或下降斜率,空气涡轮起动通过引气方式吹动发动机叶片,无法精确控制气流推力最终作用于发动机轴端的力矩大小,不具备软起动、软脱开功能;直流电机的控制都是通过接通、断开接触器的方式进行起动、断开操作,接触器的通断意味着电流突变,突变的电流将导致电机输出力矩变化速度较快,使得发动机无法平滑起动;普通变频交流起动系统可通过改变频率控制转速,但对于电机输出力矩控制,未提出平滑起动、脱开的控制方案,本发明在常规变频控制的基础上进行了改进,转矩冲击抑制能力显著。
附图说明
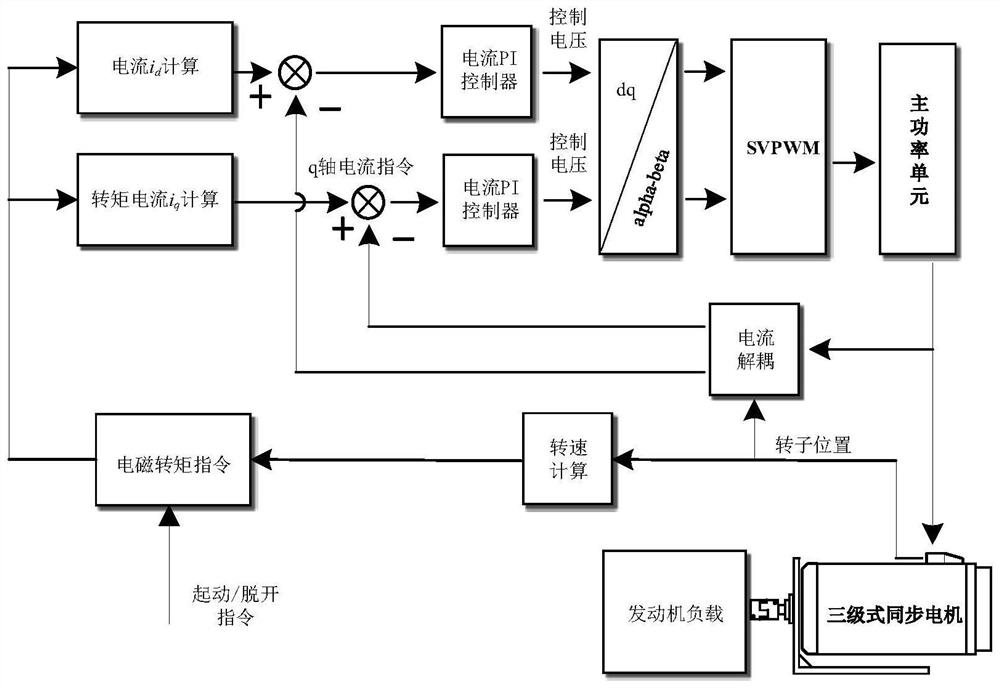
图1三级式电励磁同步电机原理图及起动控制器交联关系;
图2三级式电励磁同步电机精确转矩控制策略框图;
图3未采用本发明方案下起动时刻电流波形;
图4采用本发明方案下起动时刻电流波形;
图5未采用本发明方案下电机输出力矩试验波形;
图6采用本发明方案下起动时刻电机输出力矩试验波形;
图7采用本发明方案下起动阶段完整电机输出力矩试验波形;
图8采用本发明方案下脱开阶段电机输出力矩试验波形。
具体实施方式
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
对于三级式电励磁同步电机来说,其优势在于主发电机励磁电流可调,主发转子励磁电流对电机出力影响较大。
实现航空发动机软起动、软脱开的关键是实现精确转矩控制,首先建立三级式同步电机数学模型,考虑到工程分析的实用性,忽略电机的磁滞、饱和等因素,建立主发电机在同步旋转坐标系dq轴下的转矩方程和运动方程。
转矩方程:
T
其中,Ψ
运动方程:
T
其中,T
观察电机转矩方程,将id=0带入,可得到:
T
转矩方程得到化简,电机输出力矩仅与直轴磁链和主发交轴电流相关,结合磁链方程,此时的主发电机电磁转矩为:
T
在起动过程中,若控制励磁电流i
基于矢量控制原理,在将三相主发电流进行解耦后,可采用PID控制算法对i
图5所示为采用转矩给定方式下,航空发动机起动过程中采集到的电磁转矩曲线,对比可发现,在图5中1区出现了2倍额定电磁转矩的超调,一方面是因为低转速时电机存在堵转时刻,施加力矩给定值过大,大电流产生超调;图5中2区为达到发动机脱开转速时,电机出力曲线,可发现,在控制器封锁输出PWM后,电机轴端力矩出现了大幅度的转矩震荡,原因是在电机突然卸力时,发动机与电机花键相互磕碰,产生转矩震荡,且脱开转矩越大,转矩震荡幅度越大,针对上述问题,设计一种软起动、脱开控制方法,执行步骤如下:
步骤1:识别起动指令。
控制器识别发动机电子控制器下发的起动指令,进入起动控制程序。
步骤2:接通励磁回路,测量电机转速。
在识别到起动指令后,需向励磁机通入励磁电流,控制器首先接通励磁回路,然后,通过三级式电励磁电机内部安装的旋转变压器反馈的电信号,控制器可计算得到电机转速,进行后续操作,系统接线关系如图1所示。
步骤3:确认励磁回路接通,对励磁电流进行实时检测,在满足理论值5A+-1A范围时,认为励磁回路接通,进行后续操作。
再通过转矩指令计算交轴、直轴电流给定值i
a)软起转速设定为200rpm,time在5kHz频率下累加,iq_base设定为50A,斜率k为100/5000,分段力矩T
b)分段转速n1设定为500rpm,不采用弱磁控制,n_weak设定为8000rpm,目标转速设定为6000rpm,当转速达到6000rpm时,控制器将停止输出。
分段转矩1为20Nm,则:
c)转速分段n2,n3,n4分别设定为2000rpm、3000rpm、4000rpm,假定力矩要求值分别为30Nm、40Nm、30Nm。
d)恒功率转速n_mp设定为4000rpm、假定恒功率点转矩T_mp为30Nm,则恒功率段电流计算方式为
e)达到脱开转速后的电流给定方式
当转速达到脱开转速6000rpm,为避免电机立即停止输出后,电机轴与发动机传动轴相互磕碰,造成过大转矩震荡,控制电机输出力矩缓慢下降,且下降方式可调整。k'设定为80/5000,即每秒下降80A:
步骤4:采集电机转子位置、主电机三相电流,进行Clark和Park坐标变换,得到两相旋转坐标系下交、直轴电流,其中Clark变换采用恒幅值变换,表示如下式所示。
步骤6:将id、iq环路给定值与反馈值作差后,经PI控制器进行调节,输出得到ud'、uq'给定值,kp取值为0.0032,ki取值为0.0015,计算公式如下:
步骤7:得到电压给定值后,进行反Park变换,得到两相静止坐标系下电压,变换公式如下:
步骤8:将得到的两相静止坐标系下电压u
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种基于航空三级式电机起动/发电控制系统的转子位置故障识别与补偿方法
- 一种基于无位置传感器的航空三级式电机起动控制方法