校正装置以及校正方法
文献发布时间:2023-06-19 19:07:35
技术领域
本公开涉及对设置于作业机械的车载距离传感器进行校正的校正装置以及校正方法。
本申请基于2020年6月19日在日本提出申请的特愿2020-106401号而主张优先权,并将其内容援引于此。
背景技术
在专利文献1中公开了进行具有工作装置和拍摄装置的作业机械中的距离传感器的校正的技术。具体而言,在专利文献1所记载的校正系统中,距离传感器计测设置于工作装置的目标的距离,根据图像求出距离传感器与目标的位置关系,并基于工作装置的姿态以及根据距离数据求出的位置关系,来进行距离传感器的校正。
在先技术文献
专利文献
专利文献1:国际公开第2016/148309号
发明内容
发明要解决的课题
然而,作业机械所具备的距离传感器并不一定局限于朝向作业机械的正面而设置。例如,存在距离传感器设置于作业机械的侧面的情况。在该情况下,由于工作装置不存在于距离传感器的计测范围内,因此无法执行专利文献1所公开的校正方法。另外,并不局限于所有的作业机械具备工作装置。在该情况下,也无法执行专利文献1所公开的校正方法。
本公开的目的在于,提供一种无论工作装置是否映入在距离传感器的计测范围内均能够对距离传感器进行校正的校正装置以及校正方法。
用于解决课题的手段
根据本发明的一方式,校正装置是对设置于作业机械的车载距离传感器进行校正的校正装置,其中,所述校正装置具备:距离取得部,其取得由所述车载距离传感器计测到的、设置于所述作业机械的外部的任意的位置的第一基准物所存在的范围的距离数据即第一距离数据;位置计算部,其基于所述第一距离数据,计算规定的坐标系下的所述第一基准物的位置;关系取得部,其取得所述第一基准物与所述坐标系下的位置已知的第二基准物的位置关系;以及校正部,其基于所述第一距离数据及所述位置关系,对用于根据所述车载距离传感器的距离数据来计测所述坐标系下的位置的参数进行校正。
发明效果
根据上述方式,校正装置无论工作装置是否映入在距离传感器的计测范围内均能够对距离传感器进行校正。
附图说明
图1是示出作业机械的姿态的例子的图。
图2是示出第一实施方式的作业机械的结构的概要图。
图3是示出第一实施方式的驾驶室的内部的结构的图。
图4是示出第一实施方式的计算机的结构的概要框图。
图5是示出第一实施方式的作业机械的距离传感器的校正方法的概要的图。
图6是示出第一实施方式的作业机械的距离传感器的校正方法的流程图。
图7是示出第二实施方式的作业机械的距离传感器的校正方法的概要的图。
图8是示出第二实施方式的作业机械的距离传感器的校正方法的流程图。
图9是示出第三实施方式的作业机械的距离传感器的校正方法的概要的图。
图10是示出第三实施方式的作业机械的距离传感器的校正方法的流程图。
具体实施方式
<坐标系>
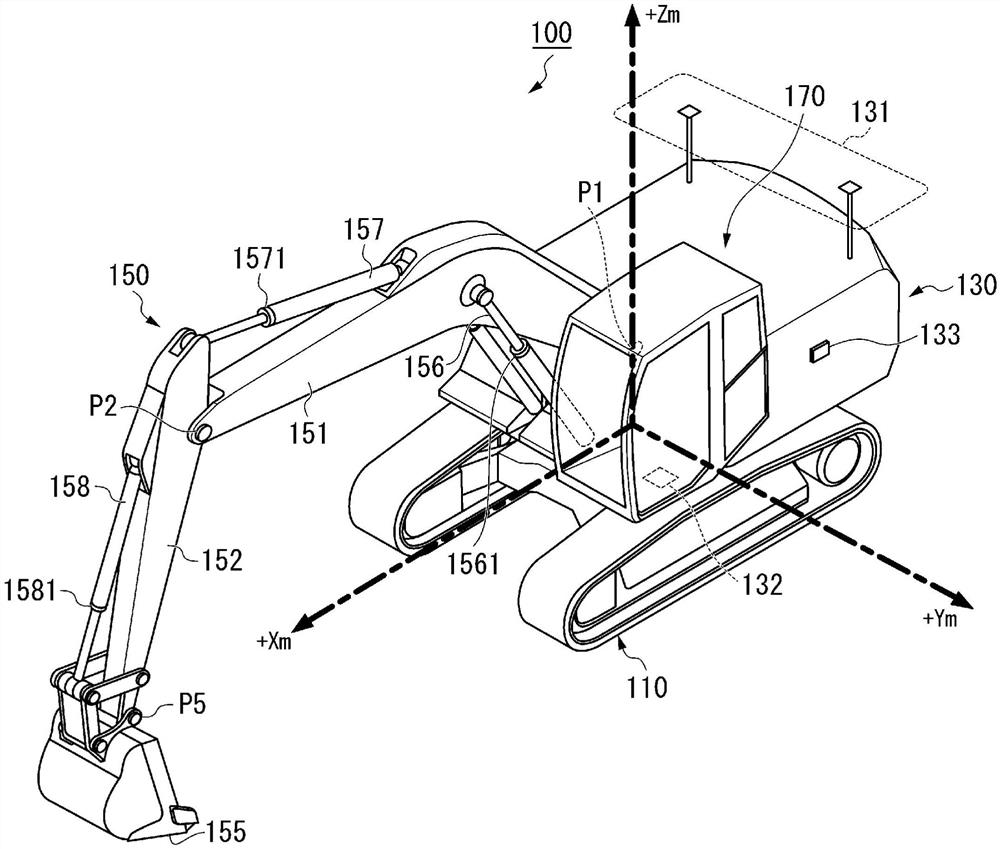
图1是示出作业机械100的姿态的例子的图。
在以下的说明中,规定了三维的现场坐标系(Xg,Yg,Zg)、三维的车身坐标系(Xm,Ym,Zm)、以及三维的传感器坐标系(Xs,Ys,Zs),并基于它们来说明位置关系。
现场坐标系是以设置于施工现场的GNSS(Global Navigation SatelliteSystem)基准站的位置作为基准点、且由沿南北延伸的Xg轴、沿东西延伸的Yg轴、沿铅垂方向延伸的Zg轴构成的坐标系。作为GNSS的例子,可举出GPS(Global Positioning System)。需要说明的是,在其他实施方式中,也可以取代现场坐标系而使用利用纬度以及经度等表示的全局坐标系。
车身坐标系是以在作业机械100的回转体130上规定的代表点O为基准、由在从后述的驾驶室170内的操作员的就坐位置观察时沿前后延伸的Xm轴、沿左右延伸的Ym轴、以及沿上下延伸的Zm轴构成的坐标系。以回转体130的代表点O作为基准而将前方称作+Xm方向、将后方称作-Xm方向、将左方称作+Ym方向、将右方称作-Ym方向、将上方向称作+Zm方向、将下方向称作-Zm方向。
现场坐标系与车身坐标系通过确定现场坐标系下的作业机械100的位置以及倾斜度而能够相互转换。
传感器坐标系是以作业机械100所具备的距离传感器的位置作为基准、且由沿距离传感器的计测方向延伸的Xs轴、沿左右延伸的Ys轴、沿上下延伸的Zs轴构成的坐标系。
距离传感器固定于车身,因此如果能够知道车身中的距离传感器的设置位置,则传感器车身坐标系与传感器坐标系能够相互转换。
<第一实施方式>
《作业机械100的结构》
图2是示出第一实施方式的作业机械100的结构的概要图。
作业机械100在施工现场运转,对砂土等挖掘对象进行施工。第一实施方式的作业机械100是液压挖掘机。
作业机械100具备行驶体110、回转体130、工作装置150、驾驶室170。
行驶体110将作业机械100支承为能够行驶。行驶体110例如是左右1对的履带。回转体130以能够绕回转中心回转的方式支承于行驶体110。工作装置150利用液压进行驱动。工作装置150以能够沿上下方向驱动的方式支承于回转体130的前部。驾驶室170是供操作员搭乘、用于进行作业机械100的操作的空间。驾驶室170设置于回转体130的前部。
《回转体130的结构》
如图2所示,回转体130具备位置方位检测器131、倾斜检测器132、以及距离传感器133。
位置方位检测器131运算回转体130的现场坐标系下的位置以及回转体130朝向的方位。位置方位检测器131具备从构成GNSS的人造卫星接收定位信号的两个天线。两个天线分别设置于回转体130上的不同位置。例如,两个天线设置于回转体130的配重部。位置方位检测器131基于两个天线中的至少一方所接收的定位信号,检测现场坐标系下的回转体130的代表点O的位置。位置方位检测器131使用两个天线分别接收的定位信号,在现场坐标系下检测回转体130朝向的方位。
倾斜检测器132计测回转体130的加速度以及角速度,并基于计测结果来检测回转体130的倾斜度(例如,表示相对于Xm轴的旋转的翻滚角、以及表示相对于Ym轴的旋转的俯仰角)。倾斜检测器132例如设置于驾驶室170的下方。作为倾斜检测器132的例子,可举出IMU(Inertial Measurement Unit:惯性计测装置)。
距离传感器133设置于回转体130,检测与计测范围内的对象物的距离。距离传感器133设置于回转体130的两侧面,在以回转体130的沿宽度方向延伸的轴(Xs轴)为中心的计测范围内检测包括施工对象在内的周围的距离。由此,在作业机械100正利用工作装置150挖掘砂土时,距离传感器133能够检测在作业机械100的侧方停车的砂土的装入对象的搬运车辆(未图示)的距离。另外,在作业机械100正将砂土装入搬运车辆时,距离传感器133能够检测施工对象的距离。
距离传感器133设置于其计测范围不与工作装置150干涉的位置。换句话说,距离传感器133计测工作装置150没有映入的范围的距离。作为距离传感器133的例子,例如可举出LiDAR装置、雷达装置、立体相机等。距离传感器133只要是其计测范围不与工作装置150干涉的位置,则也可以设置于回转体130的侧面以外的部位。例如,距离传感器133也可以设置于能够检测回转体130的上部且车身的侧方的距离的部位。另外,距离传感器133也可以仅设置于回转体130的一侧面。
距离传感器133设置为能够相对于回转体130装卸。距离传感器133是车载距离传感器的一例。
《工作装置150的结构》
如图2所示,工作装置150具备动臂151、斗杆152、以及铲斗155。
动臂151的基端部经由动臂销P1安装于回转体130。斗杆152连结动臂151与铲斗155。斗杆152的基端部经由斗杆销P2安装于动臂151的前端部。
铲斗155具备用于挖掘砂土等的铲尖、以及用于收容所挖掘的砂土的收容部。铲斗155的基端部经由铲斗销P5安装于斗杆152的前端部。
工作装置150具备作为产生动力的致动器的多个液压缸。具体而言,工作装置150具备动臂缸156、斗杆缸157、以及铲斗缸158。
动臂缸156是用于使动臂151工作的液压缸。动臂缸156的基端部安装于回转体130。动臂缸156的前端部安装于动臂151。在动臂缸156设置有检测动臂缸156的行程量的动臂缸行程传感器1561。
斗杆缸157是用于驱动斗杆152的液压缸。斗杆缸157的基端部安装于动臂151。斗杆缸157的前端部安装于斗杆152。在斗杆缸157设置有检测斗杆缸157的行程量的斗杆缸行程传感器1571。铲斗缸158是用于驱动铲斗155的液压缸。铲斗缸158的基端部安装于斗杆152。铲斗缸158的前端部安装于铲斗155。在铲斗缸158设置有检测铲斗缸158的行程量的铲斗缸行程传感器1581。
《驾驶室170的结构》
图3是示出第一实施方式的驾驶室的内部的结构的图。
如图3所示,在驾驶室170内设置有驾驶席171、操作装置172以及控制装置173。
操作装置172是用于通过操作员的手动操作而使行驶体110、回转体130以及工作装置150驱动的接口。操作装置172具备左操作杆1721、右操作杆1722、左脚踏板1723、右脚踏板1724、左行驶杆1725、右行驶杆1726。
左操作杆1721设置于驾驶席171的左侧。右操作杆1722设置于驾驶席171的右侧。
左操作杆1721是用于进行回转体130的回转动作、以及斗杆152的牵引(pulling)动作及推压(pushing)动作的操作机构。具体而言,在操作员将左操作杆1721倒向前方时,斗杆缸157进行驱动,斗杆152进行推压动作。另外,在操作员将左操作杆1721倒向后方时,斗杆缸157进行驱动,斗杆152进行牵引动作。另外,在操作员将左操作杆1721倒向右方向时,回转体130进行右回转。另外,操作员将左操作杆1721倒向左方向时,回转体130进行左回转。
右操作杆1722是用于进行铲斗155的挖掘动作及卸料动作、以及动臂151的抬起(lifting)动作及降下(lowering)动作的操作机构。具体而言,在操作员将右操作杆1722倒向前方时,动臂缸156进行驱动,执行动臂151的降下动作。另外,在操作员将右操作杆1722倒向后方时,动臂缸156进行驱动,执行动臂151的抬起动作。另外,在操作员将右操作杆1722倒向右方向时,铲斗缸158进行驱动,进行铲斗155的卸料动作。另外,在操作员将右操作杆1722倒向左方向时,铲斗缸158进行驱动,进行铲斗155的挖掘动作。需要说明的是,左操作杆1721及右操作杆1722的操作方向与工作装置150的动作方向及回转体130的回转方向的关系也可以不是上述的关系。
左脚踏板1723配置于驾驶席171的前方的底板面的左侧。右脚踏板1724配置于驾驶席171的前方的底板面的右侧。左行驶杆1725枢轴支承于左脚踏板1723,且构成为左行驶杆1725的倾斜与左脚踏板1723的踩下联动。右行驶杆1726枢轴支承于右脚踏板1724,且构成为右行驶杆1726的倾斜与右脚踏板1724的踩下联动。
左脚踏板1723以及左行驶杆1725对应于行驶体110的左侧履带的旋转驱动。具体而言,在行驶体110的驱动轮位于后方的情况下,在操作员将左脚踏板1723或者左行驶杆1725倒向前方时,左侧履带向前进方向旋转。另外,在操作员将左脚踏板1723或者左行驶杆1725倒向后方时,左侧履带向后退方向旋转。
右脚踏板1724以及右行驶杆1726对应于行驶体110的右侧履带的旋转驱动。具体而言,在行驶体110的驱动轮位于后方的情况下,在操作员将右脚踏板1724或者右行驶杆1726倒向前方时,右侧履带向前进方向旋转。另外,在操作员将右脚踏板1724或者右行驶杆1726倒向后方时,右侧履带向后退方向旋转。
控制装置173基于操作员的操作,对行驶体110、回转体130、以及工作装置150进行控制。控制装置173是输入输出装置,具备显示与作业机械100所具有的多个功能有关的信息的显示器1731。控制装置173是校正装置的一例。第一实施方式的控制装置173的输入手段是硬键。需要说明的是,在其他实施方式中,也可以将触摸面板、鼠标、或者键盘等用作输入手段。另外,第一实施方式的控制装置173与显示器1731一体地设置,但在其他实施方式中,显示器1731也可以与控制装置173分开设置。
《控制装置173的结构》
图4是示出第一实施方式的计算机的结构的概要框图。
控制装置173是具备处理器210、主存储器230、储存器250、接口270的计算机。
显示器1731经由接口270连接于处理器210。
储存器250是非临时的有形的存储介质。作为储存器250的例子,可举出磁盘、光磁盘、光盘、半导体存储器等。储存器250既可以是直接连接于控制装置173的总线的内部介质,也可以是经过有接口270或者通信线路连接于控制装置173的外部介质。储存器250存储用于校正距离传感器133的校正程序。
校正程序可以是用于实现使控制装置173发挥的功能的一部分的程序。例如,校正程序可以是通过与已存储于储存器250的其他程序的组合、或者与安装于其他装置的其他程序的组合来发挥功能的程序。需要说明的是,在其他实施方式中,控制装置173也可以除了上述结构之外、或者取代上述结构而具备PLD(Programmable Logic Device)等定制LSI(Large Scale Integrated Circuit)。作为PLD的例子,可举出PAL(Programmable ArrayLogic)、GAL(Generic Array Logic)、CPLD(Complex Programmable Logic Device)、FPGA(Field Programmable Gate Array)。在该情况下,由处理器210实现的功能的一部分或者全部也可以由该集成电路实现。
处理器210通过执行校正程序而作为显示控制部211、取得部212、位置计算部213、姿态确定部214、校正部215、坐标转换部216、参数存储部217发挥功能。
显示控制部211生成使显示器1731显示的画面数据,并将画面数据输出至显示器1731。
取得部212从各种传感器取得计测数据。具体而言,取得部212取得位置方位检测器131、倾斜检测器132、距离传感器133、动臂缸行程传感器1561、斗杆缸行程传感器1571、以及铲斗缸行程传感器1581的计测数据。
位置计算部213基于取得部212所取得的距离传感器133的计测数据(以下,称作距离数据),计算在距离传感器133的校正中所使用的标记M的传感器坐标系下的位置。作为标记M,能够使用具有规定的反射率的反射材料。由此,位置计算部213通过探索距离传感器133的计测数据中的与规定的反射率有关的部分,能够确定标记M的位置。
姿态确定部214基于取得部212取得的动臂缸行程传感器1561、斗杆缸行程传感器1571、以及铲斗缸行程传感器1581的计测数据,确定车身坐标系下的铲斗155的铲尖的位置。以下,参照图1对由姿态确定部214进行的铲斗155的铲尖的位置的确定方法进行说明。首先,姿态确定部214根据动臂缸行程传感器1561的计测数据来计算动臂151的倾斜角α。姿态确定部214基于计算出的倾斜角α、已知的动臂销P1的车身坐标系的位置、以及已知的动臂151的长度L1,确定车身坐标系下的斗杆销P2的位置。姿态确定部214根据斗杆缸行程传感器1571的计测数据来计算斗杆152的倾斜角β。姿态确定部214基于计算出的倾斜角β、斗杆销P2的车身坐标系的位置、以及已知的斗杆152的长度L2,确定车身坐标系下的铲斗销P5的位置。姿态确定部214根据铲斗缸行程传感器1581的计测数据来计算铲斗155的倾斜角γ。姿态确定部214基于计算出的倾斜角γ、铲斗销P5的车身坐标系的位置、以及已知的铲斗155的长度L3,确定车身坐标系下的铲斗155的铲尖的位置。
校正部215基于标记M的位置以及铲斗155的铲尖的位置,计算用于将传感器坐标系的位置与车身坐标系下的位置相互转换的参数。校正部215使计算出的参数存储于参数存储部217。作为参数的例子,例如可举出作业机械100中的距离传感器133的位置以及倾斜度(外部参数)。
坐标转换部216基于取得部212取得的位置方位检测器131以及倾斜检测器132的计测数据,将车身坐标系的位置与现场坐标系的位置相互转换。另外,坐标转换部216基于参数存储部217存储的参数,将传感器坐标系的位置与车身坐标系下的位置相互转换。
《距离传感器的校正方法》
图5是示出第一实施方式的作业机械100的距离传感器133的校正方法的概要的图。
在第一实施方式中,在安装于作业机械100的距离传感器133的计测范围R内设置多个标记M并计测标记M的位置,之后操作员操作作业机械100以使铲斗155的铲尖与各标记M对齐。由此,作业机械100的控制装置173能够以距离传感器133计测的标记M的位置与根据铲斗155的铲尖位置计算的标记M的位置一致的方式,来对距离传感器133的参数进行校正。需要说明的是,在其他实施方式中,控制装置173也可以不使用多个标记M、而使用一个标记M来校正距离传感器133的参数。但是,在参数的校正中优选使用多个标记M。通过使用多个标记M的位置,即使在产生车身的倾斜度的情况下也能够高精度地校正参数。
图6是示出第一实施方式的作业机械100的距离传感器133的校正方法的流程图。
在操作员操作控制装置173、而使距离传感器133的校正功能启动时,控制装置173开始图6所示的校正处理。
首先,显示控制部211将提示在距离传感器133的计测范围R内设置多个标记M的设置指示画面输出至显示器1731(步骤S1)。设置指示画面例如包括“请在距离传感器的计测范围内设置4个标记。”等引导文。另外,在设置指示画面也可以包括表示基于距离传感器133的计测数据所生成的计测范围R的形状的三维数据。由此,操作员通过视觉确认设置指示画面,能够判断标记M是否设置于计测范围R内。
操作员在完成标记M的设置后,操作控制装置173,使处理前进。接下来,取得部212从各种传感器取得计测数据(步骤S2)。位置计算部213基于在步骤S2中取得的计测数据,确定传感器坐标系下的标记M的位置(步骤S3)。
接下来,显示控制部211将提醒作业机械100的操作以使得铲斗155的铲尖与多个标记M中的一个对齐的操作指示画面输出至显示器1731(步骤S4)。操作指示画面例如包括“请使铲尖与标记对齐。”等引导文。另外,在操作指示画面中也可以包括表示基于在步骤S2中取得的计测数据所生成的计测范围R的形状的三维数据。
操作员对操作装置172进行操作,使回转体130回转,使工作装置150驱动,使铲斗155的铲尖与多个标记M中的一个接触。操作员在使铲尖与多个标记M中的一个接触时,操作控制装置173,将铲斗155的移动完成输入至控制装置173(步骤S5)。例如,操作员通过触摸操作指示画面所包括的、映有三维数据所包括的多个标记M中的与铲斗155的铲尖接触的标记M的部分,能够输入铲斗155的移动完成,并且能够将多个标记M中的与铲斗155接触的标记M输出至控制装置173。
接下来,取得部212从各种传感器取得计测数据(步骤S6)。姿态确定部214基于在步骤S6中取得的动臂缸行程传感器1561、斗杆缸行程传感器1571、以及铲斗缸行程传感器1581的计测数据,确定车身坐标系下的铲斗155的铲尖的位置(步骤S7)。此时地铲斗155的铲尖的位置与标记M的位置大致一致。换句话说,姿态确定部214是取得标记M与铲斗155的铲尖的位置关系的关系取得部的一例。
坐标转换部216基于在步骤S2中取得的位置方位检测器131及倾斜检测器132的计测数据、以及在步骤S6中取得的位置方位检测器131及倾斜检测器132的计测数据,将在步骤S7中计算出的铲斗155的铲尖的位置转换为步骤S2时间点的现场坐标系的位置(步骤S8)。换句话说,坐标转换部216通过获取在步骤S2中取得的位置方位检测器131及倾斜检测器132的计测数据、与在步骤S7中取得的位置方位检测器131及倾斜检测器132的计测数据的差值,计算位置、回转角、以及倾斜度的变化量。接着,坐标转换部216基于计算出的位置、回转角、以及倾斜度的变化量对在步骤S7中计算出的位置进行变形,由此能够得到步骤S2的时间点的现场坐标系的位置。
校正部215针对多个标记M中的全部判断是否与铲斗155的铲尖接触过(步骤S9)。例如,校正部215判断步骤S5的移动完成的输入是否进行了与在步骤S1中指定的标记M的数量对应的次数。在存在未与铲斗155的铲尖接触过的标记M的情况下(步骤S9:否),控制装置173将处理返回至步骤S4,将操作指示画面输出至显示器1731。
另一方面,在针对多个标记M中的全部已与铲斗155的铲尖接触过的情况下(步骤S9:是),校正部215基于在步骤S3中计算出的传感器坐标系下的标记的位置、以及在步骤S8中取得的对应于各标记M的铲斗155的铲尖的位置,计算距离传感器133的参数(步骤S10)。即,在步骤S8中取得的铲斗155的铲尖的位置表示步骤S2的时间点的车身坐标系下的标记M的位置。因此,校正部215通过求出全部的位置重叠那样的行列式等而通过一次坐标转换使在步骤S3中计算出的多个标记M的位置与在步骤S8中取得的多个铲斗155的铲尖的位置一致,由此能够确定作业机械100中的距离传感器133的位置以及倾斜度。
校正部215使在步骤S10中计算出的参数存储于参数存储部217(步骤S1 1)。
《作用·效果》
这样,第一实施方式的控制装置173如以下那样对距离传感器的参数进行校正。
取得部212取得由距离传感器133计测出的、设置于作业机械100的外部的任意的位置的标记M所存在的范围的距离数据。位置计算部213基于距离数据来计算标记M的位置。姿态确定部214取得使铲斗155的铲尖与标记M接触时的铲尖的位置,来作为标记M与车身坐标系及现场坐标系下的位置已知的铲斗155的铲尖的位置关系。校正部215基于使铲斗155的铲尖与标记M接触时的铲尖的位置、以及由距离传感器133计测到的标记M的位置,对确定车身坐标系下的距离传感器133的位置及倾斜度的参数进行校正。
由此,第一实施方式的控制装置173能够对计测未映入工作装置150的范围的距离的距离传感器133进行校正。
<第二实施方式>
第一实施方式的控制装置173为了距离传感器133的校正而需要使作业机械100回转、另外使工作装置150驱动。相对于此,第二实施方式的控制装置173以不操作作业机械100的方式来校正距离传感器133。
图7是示出第二实施方式的作业机械100的距离传感器133的校正方法的概要的图。
在第二实施方式中,在使用从作业机械100取下的距离传感器133计测了多个标记M以及铲斗155的铲尖的位置后,将该距离传感器133设置于作业机械100并再次计测各标记M的位置。由此,作业机械100的控制装置173能够以取下的距离传感器133计测到的标记M和铲斗155的铲尖的位置关系、与安装的距离传感器133计测的标记M的位置及由缸行程传感器计测的铲斗155的铲尖的位置的关系一致的方式,来构成距离传感器133的参数。
《距离传感器的校正方法》
图8是示出第二实施方式的作业机械100的距离传感器133的校正方法的流程图。
在操作员操作控制装置173、使距离传感器133的校正功能启动时,控制装置173开始图8所示的校正处理。
首先,显示控制部211将提示在距离传感器133的计测范围R内设置多个标记M的设置指示画面输出至显示器1731(步骤S31)。设置指示画面例如包括“请在距离传感器的计测范围内设置4个标记。”等引导文。另外,在设置指示画面中也可以包括表示基于距离传感器133的计测数据所生成的计测范围R的形状的三维数据。由此,操作员通过视觉确认设置指示画面,能够判断标记M是否设置于计测范围R内。
操作员在完成标记M的设置后,操作控制装置173,使处理前进。
接下来,取得部212从各种传感器取得计测数据(步骤S32)。姿态确定部214基于在步骤S32中取得的动臂缸行程传感器1561、斗杆缸行程传感器1571、以及铲斗缸行程传感器1581的计测数据,确定车身坐标系下的铲斗155的铲尖的位置(步骤S33)。
接下来,显示控制部211将提醒从作业机械100取下距离传感器133、且通过距离传感器133计测包括多个标记M和铲斗155的铲尖的范围的计测指示画面输出至显示器1731(步骤S34)。计测指示画面例如包括“请在取下距离传感器、并计测标记与铲斗的铲尖的距离之后,再次安装距离传感器。”等引导文。
操作员将距离传感器133从作业机械100取下,并计测包括铲斗155的铲尖和多个标记M的范围。距离传感器133例如也可以具有计测按钮,通过操作员按下该计测按钮来进行基于距离传感器133的手动的计测。
在由操作员将距离传感器133安装于作业机械100后,取得部212取得在距离传感器133被取下的期间所计测到的距离数据(步骤S35)。在距离传感器133被取下时所计测到的距离数据是铲斗155的铲尖以及标记M存在的范围的距离数据。换句话说,取得部212是取得标记M与铲斗155的铲尖的位置关系的关系取得部的一例。位置计算部213基于在步骤S35中取得的计测数据,确定距离传感器取下时的传感器坐标系下的铲斗155的铲尖以及标记M的位置(步骤S36)。
接下来,取得部212从距离传感器133取得在安装后所计测到的距离数据(步骤S37)。位置计算部213基于在步骤S36中取得的计测数据,确定距离传感器安装后的传感器坐标系下的标记M的位置(步骤S38)。
接下来,校正部215基于在步骤S33中取得的铲斗155的铲尖的位置、以及在步骤S36中计算出的距离传感器取下时的传感器坐标系下的铲斗155的铲尖及标记M的位置,确定各标记M的车身坐标系下的位置(步骤S39)。校正部215能够通过在车身坐标系下使车身坐标系下的铲尖的位置与在步骤S36中得到的铲斗155的铲尖及标记M的位置一致,来确定车身坐标系下的标记M的位置。
接下来,校正部215基于在步骤S38中确定的距离传感器安装后的传感器坐标系下的标记M的位置、以及在步骤S39中确定的标记M的车身坐标系下的位置,计算表示作业机械100中的距离传感器133的设置位置以及倾斜度的参数(步骤S40)。校正部215使在步骤S38中计算出的参数存储于参数存储部217(步骤S41)。
《作用·效果》
这样,第二实施方式的控制装置173如以下那样对距离传感器的参数进行校正。
取得部212取得由安装于作业机械100的距离传感器133计测到的、设置于作业机械100的外部的任意的位置的标记M所存在的范围的第一距离数据。另外,取得部212取得由从作业机械100取下的距离传感器133计测到的、映有铲斗155的铲尖和标记M的范围的第二距离数据,来作为标记M与车身坐标系及现场坐标系下的位置已知的铲斗155的铲尖的位置关系。校正部215基于第一距离数据以及第二距离数据,对用于根据距离传感器133的距离数据来计测车身坐标系下的位置的参数进行校正。
由此,第二实施方式的控制装置173能够对计测没有映有工作装置150的范围的距离的距离传感器133进行校正。
需要说明的是,根据第二实施方式,作为第二距离数据而使用由从作业机械100取下的距离传感器133计测到的距离数据,但在其他实施方式中并不局限于此。例如,根据其他实施方式,作为第二距离数据也可以使用由与距离传感器133分开准备的外部的距离传感器计测到的距离数据。
<第三实施方式〉
第一实施方式的控制装置173为了距离传感器133的校正而需要使作业机械100回转、另外使工作装置150驱动。相对于此,第三实施方式的控制装置173以不操作作业机械100的方式来校正距离传感器133。第三实施方式的控制装置173使用设置于外部的外部距离传感器300的计测数据来校正距离传感器133。外部距离传感器300具有定位自身的现场坐标系下的位置的定位功能。控制装置173以能够与外部距离传感器300无线或有线地通信的方式连接。控制装置173也可以构成为能够经由可移动介质等从外部距离传感器300取得数据。
图9是示出第三实施方式的作业机械100的距离传感器133的校正方法的概要的图。
在第三实施方式中,在距离传感器133的计测范围R内设置多个标记M和外部距离传感器300,使用该外部距离传感器300来计测多个标记M的位置。由此,作业机械100的控制装置173能够基于使距离传感器133计测到的标记M的位置与外部距离传感器300计测到的标记M的位置对齐时的车身坐标系下的外部距离传感器的位置、以及已知的外部距离传感器的现场坐标系的位置,来构成距离传感器133的参数。
《距离传感器的校正方法》
图10是示出第三实施方式的作业机械100的距离传感器133的校正方法的流程图。
在操作员操作控制装置173、使距离传感器133的校正功能启动时,控制装置173开始图10所示的校正处理。
首先,显示控制部211将提示在距离传感器133的计测范围R内设置多个标记M和外部计测装置的设置指示画面输出至显示器1731(步骤S51)。设置指示画面例如包括“请在距离传感器的计测范围内设置4个标记、而且在该计测范围内以映有4个标记的方式设置外部距离传感器。”等引导文。另外,在设置指示画面中也可以包括表示基于距离传感器133的计测数据所生成的计测范围R的形状的三维数据。由此,操作员通过视觉确认设置指示画面,能够判断标记M以及外部距离传感器300是否设置于计测范围R内。
操作员在完成标记M以及外部距离传感器300的设置后,操作控制装置173,使处理前进。取得部212从各种传感器取得计测数据(步骤S52)。位置计算部213基于在步骤S52中取得的距离数据,确定传感器坐标系中的标记M以及外部距离传感器300的位置(步骤S53)。坐标转换部216基于参数存储部217存储的参数以及在步骤S52中取得的位置方位检测器131及倾斜检测器132的计测数据,将在步骤S53中确定的标记M以及外部距离传感器300的位置转换为现场坐标系的位置(步骤S54)。
另外,取得部212从外部距离传感器300取得表示外部距离传感器300的现场坐标系下的位置的位置数据和计测数据(步骤S55)。
校正部215根据在步骤S55中取得的外部距离传感器300的位置数据以及计测数据来确定各标记M的现场坐标系下的位置(步骤S56)。接下来,校正部215以在步骤S54中确定的标记M及外部距离传感器300的现场坐标系的位置、与在步骤S55中取得的外部距离传感器300的位置数据及在步骤S56中确定的标记M的现场坐标系下的位置之差成为最小的方式,来确定作为作业机械100中的距离传感器133的位置以及倾斜度的参数(步骤S57)。
校正部215使在步骤S57中计算出的参数存储于参数存储部217(步骤S58)。
《作用·效果》
这样,第三实施方式的控制装置173如以下那样对距离传感器的参数进行校正。
取得部212取得由安装于作业机械100的距离传感器133计测出的、设置于作业机械100的外部的任意的位置的标记M以及外部距离传感器300所存在的范围的第一距离数据。另外,取得部212取得由外部距离传感器300计测到的、映有标记M的范围的第二距离数据,来作为标记M与车身坐标系及现场坐标系下的位置已知的外部距离传感器300的位置关系。校正部215基于第一距离数据以及第二距离数据,对用于根据距离传感器133的距离数据来计测车身坐标系下的位置的参数进行校正。
由此,第三实施方式的控制装置173能够对计测没有映有工作装置150的范围的距离的距离传感器133进行校正。
<其他实施方式〉
以上,参照附图对一实施方式进行了详细说明,但具体的结构并不局限于上述的方式,而能够进行各种设计变更等。即,在其他实施方式中,上述的处理的顺序可以适当变更。另外,一部分的处理也可以并行执行。
例如,在其他实施方式中,使用GNSS-RTK(Real Time Kinematic)漫游者(rover)来确定多个标记M的现场坐标系下的位置,并基于该现场坐标系的位置来校正距离传感器133。
具体而言,其他实施方式的控制装置173也可以按照以下的步骤来校正距离传感器133。控制装置173接受使用GNSS-RTK漫游者计测到的3个以上的标记M各自的现场坐标系下的位置的输入。控制装置173基于从位置方位检测器131以及倾斜检测器132得到的计测数据,将由距离传感器133计测到的标记M的位置转换为现场坐标系。控制装置173以转换后的多个标记M的位置与由GNSS-RTK漫游者确定的多个标记M的位置一致的方式,对距离传感器133的参数进行校正。另外,其他实施方式的控制装置173也可以按照以下的步骤来校正距离传感器133。控制装置173接受使用GNSS-RTK漫游者计测到的一个标记M地现场坐标系下的位置的输入。操作员操作作业机械100,在标记M位于距离传感器133的计测范围R内的3个以上的不同地点,通过距离传感器133来计测标记M的位置。控制装置173基于从位置方位检测器131以及倾斜检测器132得到的计测数据,将从不同的位置计测到的标记M的位置转换为现场坐标系。控制装置173以转换后的多个标记M的位置与由GNSS-RTK漫游者确定的标记M的位置一致的方式,对距离传感器133的参数进行校正。
上述的实施方式的控制装置173既可以是由单独的计算机构成的装置,也可以是将控制装置173的结构分开地配置于多个计算机、通过多个计算机相互协同工作而作为控制装置173发挥功能的装置。此时,也可以是,构成控制装置173的一部分计算机搭载于作业机械100的内部,其他计算机设置于作业机械100的外部。
根据上述的实施方式,基于缸行程传感器的计测数据来求出工作装置150的姿态,但在其他实施方式中并不局限于此。例如,在其他实施方式中,也可以取代缸行程传感器,而基于分别安装于动臂151、斗杆152、以及铲斗155的IMU、计测各销的旋转量的编码器等来确定工作装置150的姿态。
附图标记说明:
100…作业机械;133…距离传感器;150…工作装置;212…取得部;213…位置计算部;214…姿态确定部;215…校正部。