一种分析物水平监测系统
文献发布时间:2023-06-19 19:14:59
技术领域
本发明属于血糖连续监测技术领域,尤其是涉及一种分析物水平监测系统。
背景技术
CGMS是指通过葡萄糖传感器植入用户皮下组织,植入皮肤内的生物传感器和组织液接触,产生电流信号,并将产生的电流信号传递给固定在皮肤上的固定接收器,固定接收器将电流信号转换为数字信号,再通过数值换算成血糖浓度数值。连续血糖监测系统CGMS可以提供连续、全面的血糖信息,可将其形象地比喻为“血糖电图”,与心电图类似,能获得患者在佩戴期间的血糖波动图,是了解食物种类、运动类型、药物品种、精神因素、生活方式等因素与患者血糖波动之间的关系,帮助制订个体化的治疗方案,提高治疗依从性,作为可视化糖尿病治疗的工具。
CGMS一般由一款可微创植入人体皮下的基于GOx的“针型”电化学葡萄糖传感器及一套无线或有线的信号检测及传输/记录装置(发射器),以及将检测到的电流信号转换成葡萄糖浓度的处理器(通常置于App或接收器中)组成,通常,还需要一个将传感器植入皮下的助针器。通过助针器将传感器刺入皮下,传感器在患者的组织液中与体内葡萄糖发生氧化反应时形成电信号,电信号随之被转换为血糖读数,再通过发射器传输到接收器上。在这些数据和直观图的指导下,临床医生能够全面了解患者24小时的血糖波动情况,必要时可配合胰岛素泵给患者注射胰岛素。
一般而言,CGMS传感器工作电极由表面金属层、内层、酶层及外膜组成,组织间液(Interstitial Fluid,ISF)中的溶解氧与葡萄糖透过外膜进入酶层,葡萄糖分子与酶反应,产生电活性的反应产物过氧化氢和葡萄糖酸,过氧化氢分别向内和向外扩散,向内扩散的部分到达电极表面,发生电极反应,形成电极电流。该电流与葡萄糖浓度在一定范围内呈近似的线性关系,从而可以通过电流值的大小换算出葡萄糖浓度。
目前,除Dexcom公司使用柔性贵金属合金丝做为传感器基底材料外,其他各家基本上采用柔性基底材料PI或PET,然后对其进行金属化、图案化后实现电极的制备,传感器探头在植入前被套设入半闭针内,在助针器的作用下,半闭针包裹传感器探头进入皮下后,半闭针也随之脱出,传感器探头被顺利植入皮下。
皮下组织厚度可因性别、身体部位和体重指数的不同而有很大差异,一般利用红光可以穿透人体组织的特性来检测皮肤厚度,还有一些是利用超声波检测波和超声波回波信号检测皮肤厚度。
CGMS能正确反映人体血糖的变化,这是建立在细胞间液中的葡萄糖浓度与血糖浓度非常相似的假设基础之上,其基本依据是来源于人体毛细血管的组织液葡萄糖与血糖之间呈现较高的相关性,通过参考血糖值的校准,即可以将组织液中葡萄糖生化反应生成的电流转换成血糖检测值。这就要求传感器越接近于毛细血管丰富的部位,其准确性越高。由于CGMS传感器通常是被要求植入皮下脂肪层,因此,不同的个体,由于其身体条件不同,脂肪层的厚度,其中毛细血管的丰富程度都有差异。人体脂肪通常有白色与棕色两种,其中:白色脂肪堆积在皮下,负责储存多余的能量,也形成了难看的赘肉;棕色脂肪细胞内含有大量的线粒体,毛细血管丰富,因此,棕色脂肪部位或者白色脂肪与棕色脂肪的连接处,是CGMS传感器推荐的植入部位。传感器植入深度的调节,有助于获得传感器的最大有效面积,保证传感器的灵敏性和准确性。
目前国内外一些连续血糖监测系统CGMS(Continuous Glucose MonitoringSystem)产品中植入患者皮下的柔性传感器探头和引导针长度是不可变的,一般植入人体皮肤5mm。但人体皮肤厚度因人而异,皮肤厚度会因人种、年龄、性别、部位等的不同而不相同,通常为0.5-4mm(不包括皮下脂肪层),所以柔性传感器探头和引导针植入人体的深度不一定能与所有用户的皮肤厚度相匹配,造成部分糖尿病患者伤口较深、体验感的血糖监测值不够精准。
发明内容
为了克服现有技术的不足,本发明提供一种传感器植入深度和引导针植入深度可以准确调节,血糖监测值准确,结构简单的一种分析物水平监测系统。
本发明解决其技术问题所采用的技术方案是:一种分析物水平监测系统,包括:
发射器机构,至少包括可植入皮肤的传感器,及用于检测人体皮肤厚度的厚度检测单元;
可调引导针机构,用于驱动引导针伸出或缩回,该引导针形成供传感器伸入的空腔;
拔针件,用于夹持或放松所述可调引导针机构;
击发模块,可发生轴向平移,用于夹持或放松发射器机构,以及用于夹持或放松拔针件;
根据厚度检测单元检测的人体皮肤厚度,调整引导针至目标伸出长度,发射器机构调整传感器至目标伸出长度;
解除击发模块的锁定,所述击发模块带着发射器机构下移,直至发射器机构脱离击发模块,击发模块解除对所述拔针件的夹持,拔针件复位。
进一步的,所述发射器机构还包括用于驱动传感器伸缩的动力装置,其至少包括直齿段,可与直齿段啮合传动的传动杆,及用于驱动传动杆转动的动力源,当传动杆周向旋转,所述直齿段线性往复运动,以带动传感器伸缩。直齿段和传动杆啮合传动具有较好的瞬时传动精度、传动平稳精度以及反向锁定特性,传动效果好。
进一步的,所述传感器伸缩长度的计算公式为移动
进一步的,所述传感器撤回长度的计算公式为L=n*P,其中n为转数,P为齿距。
进一步的,所述传动杆的转速为15-30rpm/min或60-100rpm/min。传感器撤回的速度相对较快,可以减少用户的疼痛感和异物感,避免因直接扯去发射器带来的疼痛感、出血量及潜在的感染危险;传感器微调的伸缩速度相对较小,减轻用户的疼痛感和异物感。
进一步的,所述发射器机构还包括调节机构,其至少包括调节滑钮,设于调节滑钮的弹性按钮,及锁止单元,所述弹性按钮从壳体的滑槽伸出;在弹性按钮上施加外力,将锁止单元从锁止状态切换至解锁状态,弹性按钮可以沿着滑槽移动,所述调节滑钮带着传感器移动实现伸缩。
植入电极的上下调节转换为左右平移调节,使得发射器机构的厚度无需加厚,穿戴体验感更好;操作更加方便可靠,结构更加轻巧和简单;取消机械动力元件,制造成本相对降低。
进一步的,所述锁止单元包括设于壳体的固定锯齿段,及设于调节滑钮的滑齿,在锁止状态,所述滑齿落入固定锯齿段形成啮合,在解锁状态,所述滑齿脱离固定锯齿段。
进一步的,所述滑槽沿壳体的长度方向延伸,其对应位置设有刻度区;所述滑槽的长度为2-10mm,所述刻度区的刻度线间距为0.04-0.40mm。根据刻度线调整传感器的伸缩长度,更加直观、可靠,操作方便。
进一步的,包括外壳,位于外壳内的内壳,触发按钮,及调节旋钮;所述外壳形成有调节旋钮连接端和触发按钮连接端,所述触发按钮可转动地连接于触发按钮连接端,所述调节旋钮可转动地连接于调节旋钮连接端,且所述可调引导针机构与调节旋钮相连;
进一步的,所述内壳包括上部体和下部体,该下部体的内径大于上部体的内径;所述击发模块内壳中轴向平移,下部体解除对击发模块的限位,发射器机构脱离击发模块,解除对发射器结构的限位和对拔针件的夹持。
进一步的,所述可调引导针机构包括可与调节旋钮相连的活动针座,与活动针座转动连接的固定针座,及引导针,周向转动活动针座可驱动引导针上下移动;所述活动针座内部形成内螺纹,所述引导针形成外螺纹,所述固定针座内形成活动针座腔;所述活动针座或/和固定针座上形成连接脚,以实现活动针座和固定针座的轴向限位。
进一步的,所述发射器机构还包括蜂鸣器,在血糖偏离设定临界值时,控制处理器驱动蜂鸣器发出警示声,并向外界发送信号。
只用轻旋调节旋钮,即可实现引导针的上下移动,易于操作且方便用户根据皮肤测量厚度自行调节引导针的植入长度,减少了客户因扎针过深的不适感;可以方便、快速地调节引导针的植入深度,配合使得传感器准确植入目标深度,保证后续皮下监测数据的准确性,结构简单,操作方便,引导针的伸缩长度便于直观显示。
本发明的有益效果是,1)通过厚度检测单元检测的人体皮肤厚度,实现了根据个人皮肤厚度的差异调节传感器植入深度的目的,使得传感器准确植入目标深度,保证后续皮下监测数据的准确性;2)可调引导针机构的设计,在生产中即可调节为不同植入长度的引导针,再与对应的发射器机构配置,可以设置成适合各种皮肤厚度、各类人种的用户使用;节省产线和仪器的投入,可以在生产中随机应变,更好的满足客户需求;3)可调引导针机构与调节旋钮的配合使用,只用轻旋可调引导针机构或调节旋钮,即可实现引导针的上下移动,易于操作且方便用户根据皮肤测量厚度自行调节引导针的植入长度,减少了客户因扎针过深的不适感;4)通过与发射器机构的配合使用,使得引导针和传感器都可根据用户的身体指标和需求调节,使得用户的不适感和疼痛感降低,提高了传感器检测的准确性;5)助针装置内部筋和槽的设计使得整个植针过程更加平稳,提升用户体验感,同时结构也更加简单,降低制造复杂度和生产成本;6)锁定支架和触发按钮的设计避免了用户的误触发,提高助针装置使用的安全性。
附图说明
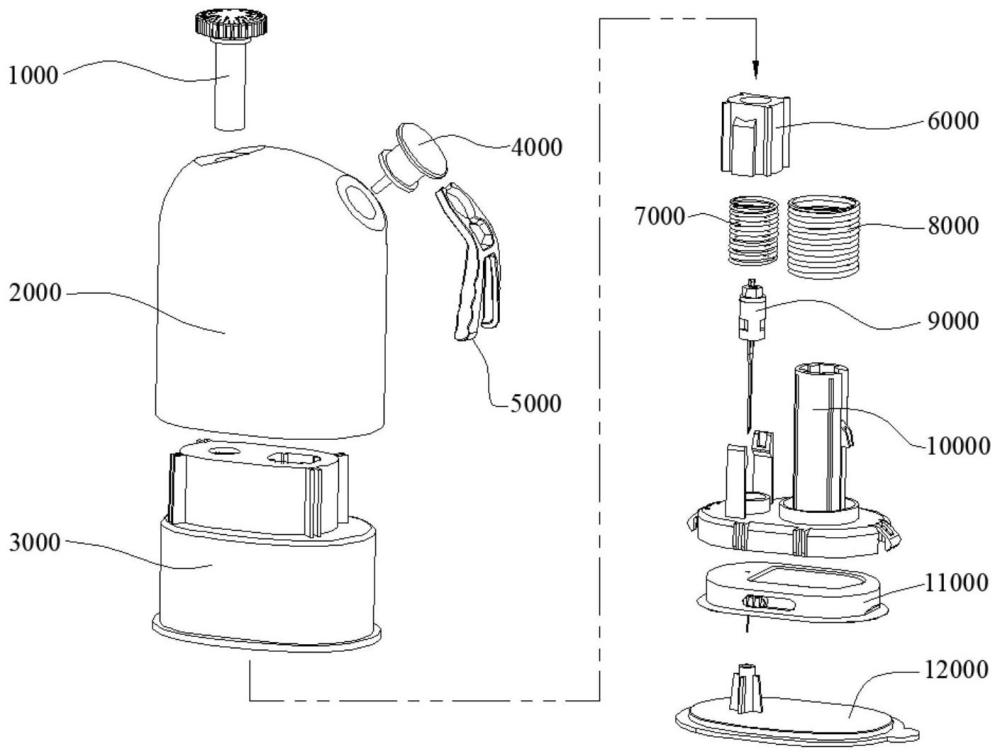
图1为本发明的助针装置分解结构示意图。
图2为本发明中调节旋钮的立体图。
图3为本发明中调节旋钮的俯视图和主视图。
图4为本发明中外壳的示意图一。
图5为本发明中外壳的示意图二。
图6为本发明中外壳和调节旋钮的转动配合结构示意图。
图7为本发明中内壳的立体图。
图8为本发明中内壳的局部截面示意图。
图9为本发明中触发按钮的立体图。
图10为本发明中锁定支架的立体图。
图11为本发明中拔针件的立体图。
图12为本发明中拔针件的局部截面示意图。
图13为本发明中可调引导针机构的剖视图。
图14为本发明中可调引导针机构的立体图。
图15为本发明中可调引导针机构的工作示意图。
图16为本发明中可调引导针机构的局部剖视图。
图17为本发明中击发模块的立体图一。
图18为本发明中击发模块的立体图二。
图19为本发明工作过程(触发按钮下压解锁击发模块)的内部剖视图。
图20为本发明工作过程(击发模块下移)的内部剖视图。
图21为本发明工作过程(击发模块解除对发射器机构的限位)的内部剖视图。
图22为本发明使用过程中转动调节旋钮的示意图。
图23为本发明使用过程中锁定支架解除对触发按钮的锁定的示意图。
图24为本发明使用过程中放置到预期植入部位并按下触发按钮的示意图。
图25为本发明的发射器机构粘贴在皮肤表面工作的示意图。
图26为本发明的发射器机构为手动调节结构的立体图一。
图27为本发明的发射器机构为手动调节结构的立体图二。
图28为本发明的发射器机构为手动调节结构的分解结构示意图。
图29为本发明的发射器机构为手动调节结构的局部截面示意图。
图30为本发明的发射器机构为手动调节结构,且处于锁止状态的局部截面示意图及对应的内部俯视图。
图31为本发明的发射器机构为手动调节结构,滑齿脱离固定锯齿段状态的局部截面示意图及对应的内部俯视图。
图32为本发明的发射器机构为手动调节结构,弹性按钮沿着滑槽移动状态的局部截面示意图及对应的内部俯视图。
图33为本发明的发射器机构为手动调节结构,传感器缩回目标长度后锁止单元处于锁止状态的局部截面示意图及对应的内部俯视图。
图34为本发明的发射器机构为手动调节结构,调节滑钮的立体图。
图35为本发明的发射器机构为手动调节结构,底壳的立体图。
图36为本发明的发射器机构为手动调节结构,外壳的立体图。
图37为本发明的发射器机构为手动调节结构,传感器的示意图。
图38为本发明的发射器机构为手动调节结构,可视窗口的示意图。
图39为本发明的发射器机构为自动调节结构的分解结构示意图。
图40为本发明的发射器机构为自动调节结构的局部截面示意图。
图41为本发明的发射器机构为自动调节结构,传感器伸出时的动力装置动作示意图。
图42为本发明的发射器机构为自动调节结构,传感器伸出时的俯视结构示意图。
图43为本发明的发射器机构为自动调节结构,传感器缩回或撤回时的动力装置动作示意图。
图44为本发明的发射器机构为自动调节结构,传感器缩回或撤回时的俯视结构示意图。
图45为本发明的发射器机构为自动调节结构,控制处理器的立体图。
图46为本发明的发射器机构为自动调节结构,底壳的立体图。
图47为本发明的发射器机构为自动调节结构,传感器和卡槽的配合结构示意图。
图48为本发明的发射器机构为自动调节结构,底壳的剖视图。
图49为本发明的发射器机构为自动调节结构,传感器在通道中缩回和伸出的示意图。
图50为本发明的发射器机构为自动调节结构,传感器伸出过程与助针器配合的示意图。
图51为本发明的发射器机构为自动调节结构,浮动弹球压持传感器的结构示意图。
图52为本发明的发射器机构为自动调节结构,传感器植入人体皮肤的示意图。
图53为本发明的发射器机构为自动调节结构,传感器长度示意图。
具体实施方式
为了使本技术领域的人员更好的理解本发明方案,下面将结合本发明实施例中的附图,对发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
如图1所示,一种分析物水平监测系统,包括调节旋钮1000、外壳2000、内壳3000、触发按钮4000、锁定支架5000、拔针件6000、拔针弹簧7000、击发弹簧8000、可调引导针机构9000、击发模块10000、发射器机构11000、底盖12000。
如图2、3所示,所述调节旋钮1000包括刻度盘1001、齿状柱面1002、限位台阶1003、连接端1004、调节限位块1005,所述刻度盘1001上具有标识,旋转调节旋钮1000一周,可以调节引导针9001长度伸缩2-8mm,优选伸缩4mm,本助针装置调节旋钮初始值是4mm,刻度盘1001的标识范围为4mm-8mm;所述齿状柱面1002可以增大调节旋钮1000与使用者的摩擦力,便于用户使用;所述限位台阶1003与外壳2000相连,所述刻度盘1001与外壳2000相连,限位台阶1003和刻度盘1001限制调节旋钮1000的轴向运动,防止其脱离外壳2000;所述连接端1004与可调引导针机构9000相连,可采用摩擦力较大的材料使得连接端1004与可调引导针机构9000必须在一定的外力作用下才可实现旋转;所述调节限位块1005与调节旋钮挡块2004止转配合连接,用于限制调节旋钮1000只可旋转±360°。
如图4-图6所示,外壳2000包括调节旋钮连接端2001、触发按钮连接端2002、外壳连接端2003和调节旋钮挡块2004。所述调节旋钮连接端2001与调节旋钮1000的限位台阶1003相连;所述触发按钮连接端2002连接触发按钮2000;所述外壳连接端2003与内壳3000相连,所述调节旋钮挡块2004与调节限位块1005止转配合,限制调节旋钮1000只能在360度内顺时针或逆时针旋转,不可一直顺时针或逆时针旋转。
如图7、图8所示,所述内壳3000包括内壳连接端3001、调节旋钮通道3002、击发壳体通道3003、拔针壳体导向槽3004、击发弹簧容纳槽3005、击发壳体导向筋3006、击发壳体导向槽3007、卡爪挡筋3008、薄壁部3011。所述内壳连接端3001与外壳连接端2003配合连接,实现外壳2000和内壳3000的装配;所述击发壳体通道3003容纳击发模块1000的部分,并通过击发壳体导向筋3006、击发壳体导向槽3007与击发模块1000相连;所述拔针壳体导向槽3004可以实现拔针动作平稳进行;所述卡爪挡筋3008与与击发模块1000相连,实现对击发模块1000的放松。
内壳3000包括上部体3009和下部体3010,该下部体3010的内径大于上部体3009的内径。
如图9所示,所述触发按钮4000包括触发面4001、限位台阶4002、触发杆4003和限位柱4004。所述触发面4001是用户按压面,触发面4001表面有凸粒,方便用户按压和识别触发按钮4000;所述触发面4001、限位台阶4002位于触发按钮连接端2002的两端,所述触发杆4003与击发模块10000抵触连接,通过按压触发面4001使得触发杆4003抵压击发模块10000。
如图10所示,所述锁定支架5000包括卡箍5001和弹夹5002。所述卡箍5001位于触发面4001下端和触发按钮连接端2002上端,实现对触发按钮4000的锁死,防止用户误触发;所述卡箍5001内侧还可以设置凸块,限位柱4004上还可设置凹槽,卡箍5001凸块与限位柱4004凹槽配合,可以更高效的实现对触发按钮4000的锁死,所述弹夹5002是U型、V型或其他易于操作的形状,方便用户单手挤压弹夹5002,撑开卡箍5001,实现对触发按钮4000的解锁,此时用户按压触发按钮4000,可以实现对击发模块10000的击发。
如图11、图12所示,所述拔针件6000包括导向筋6001、滑脱斜面6002、拔针弹簧容纳槽6003和三爪卡扣6004。所述导向筋6001与拔针壳体导向槽3004配合,拔针件6000可在拔针壳体导向槽3004内上下滑动,实现植针和拔针的平稳进行;所述滑脱斜面6002与击发模块1000接触;拔针弹簧容纳槽6003容纳拔针弹簧7000,拔针弹簧7000在初始状态为蓄力状态;所述三爪卡扣6004与可调引导针机构9000配合。
如图13-16所示,所述可调引导针机构9000包括引导针9001、活动针座9002和固定针座9003,所述引导针9001为不封闭的引导针,引导针9001上端设有外螺纹,中段为过渡平滑面,下端9007为植入端,该植入端具有平滑表面并可以容纳传感器11003,即形成供发射器机构11000的传感器11003伸入的空腔;所述活动针座9002还包括连接脚9005、内螺纹9008,固定针座9003端部形成卡槽,所述连接脚9005伸入固定针座9003内部卡槽,使得活动针座9002可以在固定针座9003内完成转动;也可固定针座9003设有连接脚9005,活动针座9002端部形成卡槽,所述连接脚9005伸入活动针座9002内部卡槽,使得活动针座9002可以在固定针座9003内完成转动;或活动针座9002和固定针座9003均设有连接脚9005,活动针座9002和固定针座9003端部均设有卡槽。在本实施例中,活动针座9002和固定针座9003端部均形成卡槽,活动针座9002和固定针座9003上均形成连接脚9005,以实现活动针座9002和固定针座9003的轴向限位。在本实施例中,连接脚9005为环状的弧形突起。
所述活动针座9002与连接端1004配合连接,活动针座9002和连接端1004为圆形或多边形结构,能实现止转配合即可,两者相互配对且具有一定弹性,可以满足活动针座9002受到外力时,活动针座9002与连接端1004断开连接,所述内螺纹9008和引导针9001上端外螺纹配合;所述固定针座9003外表面具有缺口9004,内部具有固定针座腔9006和引导针9001中段容纳槽9009,所述缺口9004与拔针件的三爪卡扣6004配合,实现对可调引导针机构9000的夹持;当顺时针或逆时针旋转活动针座9002时,由于活动针座9002和引导针9001的螺纹连接关系,引导针9001会在活动针座腔9006上下运动,实现引导针植入部分长度的调节,所述引导针9001中段容纳槽9009为半圆形或其他形状,与引导针9001中段横截面相配合,仅容纳引导针9001中段,限制引导针9001调节的最短长度和最长长度,使得植入动作更稳定。
如图17、18所示,击发模块10000包括拔针壳体装夹卡扣10001、拔针弹簧容纳槽10002、底盘导向槽10003、弹性卡爪10004、击发弹簧容纳槽10005、导向限位槽10006、触发卡扣10007和过针通道10008。所述拔针壳体装夹卡扣10001与滑脱斜面6002配合,实现未击发状态,对拔针件6000的固定与限位;所述拔针弹簧容纳槽10002容纳拔针弹簧7000;所述底盘导向槽10003与击发壳体导向槽3007互相配合,完成对击发模块10000运动的轴向限位;弹性卡爪10004与可调发射器11000配合连接;所述击发弹簧容纳槽10005容纳击发弹簧8000;所述导向限位槽10006与击发壳体导向筋3006互相配合,完成对击发模块10000运动的轴向限位,使得植入过程更加平稳;所述触发卡扣10007与内壳3000的击发壳体通道3003接触,未击发时,触发卡扣10007卡住击发壳体通道3003顶面边缘,实现击发模块10000与内壳3000相互锁死,触发卡扣10007具有一定的弹性,当触发杆403挤压触发卡扣10007离开击发壳体通道3003顶面边缘时,助针装置实现击发。此时由于内壳3000的下部体3010下端内壁的薄壁部3011放松了对弹性卡爪10004的夹持,继而放松了对发射器机构11000的夹持。
本发明的工作过程是,如图19所示,按压触发按钮4000,触发顶杆4003抵压触发卡扣10007,触发卡扣10007远离击发壳体通道3003边缘,助针装置被激发。
如图20所示,触发卡扣10007解除对内壳3000的限位,在击发弹簧8000弹力的驱动下,击发模块10000向下运动,引导针机构9000也被带动向下运动,与连接端1004分离。
如图21所示,当击发模块的弹性卡爪10004移动至内壳3000的薄壁部3011处,击发模块的拔针壳体装夹卡扣10001移动至下部体3010,弹性卡爪1004解除对发射器机构11000的限位,使得发射器机构11000黏贴于人体皮肤表面,拔针壳体装夹卡扣10001解除对拔针壳体6000的限位,此时拔针弹簧7000的弹力驱动拔针壳体6000向上运动,完成拔针动作,传感器11003顺利植入人体。
本发明的使用流程是,如图22所示,根据厚度检测单元检测的皮肤厚度,与初始植入长度比较,用户调节刻度盘1001(顺时针/逆时针→增长/减少),调节引导针9001的植入长度;发射器机构11000收到厚度检测单元检测的皮肤厚度后,会自动调节传感器11003的植入长度。
或者,根据厚度检测单元检测的皮肤厚度,与初始植入长度比较,用户调节刻度盘1001(顺时针/逆时针→增长/减少),同时手动操作调节改变传感器11003的植入长度。
上述的厚度检测单元可以内置于发射器机构,用于将检测到的皮肤厚度信号发送至控制处理器004。当然,厚度检测单元也可以外置于发射器机构。如图23所示,用户打开锁定支架和底盖。
如图24所示,用户将助针装置放置在预期植入部位,按压触发按钮4000,助针装置击发。
如图25所示,发射器机构11000粘贴在皮肤表面开始工作,可视窗口002显示传感器11003植入人体皮肤的深度、血糖值、血糖监测曲线、电量、WiFi/蓝牙连接等信息,在传感器11003调节状态时,也可以显示11003植入深度数据、电量、WiFi/蓝牙连接信息。
如图26所示,所述发射器机构11000包括调节模块11001、敷贴粘纸11002、传感器11003、可视窗口11004、壳体11005。所述调节模块11001负责控制并处理传感器11003长度的调节;所述敷贴粘纸11002用于将发射器机构11000黏贴于人体表面;所述传感器11003用于检测人体的血糖信号及供能;所述可视窗口11004用于显示传感器11003植入人体皮肤的深度、血糖值、血糖监测曲线、电量、WiFi/蓝牙连接等信息。
发射器机构11000还包括蜂鸣器,当血糖高于或低于设定临界值时,此临界值用户可以根据个人需求自行调节设置,控制处理器004会驱动蜂鸣器发出警示声提醒佩戴者,同时还会驱动无线装置发送信号给云端,此云端可以是医院端或个人用户端等。
为了实现根据厚度检测单元检测的人体皮肤厚度后,发射器机构11000中调整传感器11003至目标伸出长度,可以采用自动和手动两种结构。
当采用手动结构时,调节模块11001为调节机构,如图27、图28所示,其至少包括调节滑钮007,设置在调节滑钮007上的弹性按钮0071,及锁止单元。在壳体11005的侧壁形成滑槽0081,该滑槽0081沿着壳体11005的长度方向延伸,弹性按钮0071从壳体11005的滑槽0081伸出。
更具体的,锁止单元包括设置在壳体11005内侧壁的固定锯齿段0085,及设置在调节滑钮007的滑齿0070,固定锯齿段0085沿着壳体11005的长度方向延伸,其与滑槽0081重叠设置,且长度大于滑槽0081的长度,固定锯齿段0085上带有多个锯齿。在锁止状态,滑齿0070落入固定锯齿段0085形成啮合;在弹性按钮0071上施加外力,滑齿0070脱离固定锯齿段0085,即将锁止单元从锁止状态切换至解锁状态,弹性按钮0071可以沿着滑槽0081移动,调节滑钮007带着传感器移动实现伸缩。
在本实施例中,调节滑钮007呈U字形,其开口端两侧均设有弹性按钮0071,也可仅在开口端一侧设置有弹性按钮0071,其封闭端与控制处理器004相连,控制处理器004上具有可以与传感器相连的卡槽005。
如图34、图28所示,调节滑钮007的封闭端设置有凹台0072,控制处理器004的端部形成凸部0041,该凸部0041可以卡入凹台0072内,实现调节滑钮007和控制处理器004的连接,调节滑钮007与控制处理器004的连接也可一体设置。
由于在弹性按钮0071上施加外力时,调节滑钮007的开放端会向内收缩,在控制处理器004的侧方形成缺口槽0042,从而给调节滑钮007开口端提供足够的活动空间。
为了直观读取传感器的伸缩长度,在滑槽0081对应位置设置有刻度区0082,滑槽0081的长度为2-10mm,优选为3-5mm,刻度区0082的刻度线间距为0.04-0.40mm,优选为0.04-0.06mm。在本实施例中,每滑动一个刻度线,相当于调节0.05mm,调节范围0-4mm。
为了便于装配,壳体11005包括底壳008和外壳0086,在底壳008上方边缘形成底壳止口0082,在外壳0086的下方边缘形成外壳止口0014,外壳止口0014贴合卡入底壳止口0082的外壁,实现底壳008和外壳0086的装配连接。外壳0086连接有可视窗口002,该可视窗口002通过柔性线组003与控制处理器004相连接。外壳0086还开设有过针口0012。外壳0086的下表面连接有敷贴粘纸。
用户使用皮层测量单元在患者的预期部位量出最佳植入深度。皮层测量单元显示的数值与本发射器装置上刻度有对应关系。
如图30所示,此时固定锯齿段0085和滑齿0070相啮合,锁止单元处于锁止状态,弹性按钮0071不会相对滑槽0081移动,植入电极0061长度不变;
如图31所示,医生用手指按压两侧的弹性按钮0071后,滑齿0070脱离固定锯齿段0085,如图32所示拖曳调节滑钮007向箭头方向移动至需要的刻度,松开两侧弹性按钮0071,固定锯齿段0085和滑齿0070相啮合,如图33所示,此时植入电极0061已调节至预期深度。
可以在植入前调节传感器长度,也可在植入后调节传感器长度。
如图38所示,为本可调式发射器装置工作状态时,可视窗口002显示界面,在显示窗口002上,用户可以直观看到传感器植入深度、血糖值、血糖监测曲线、电量、WiFi/蓝牙连接等信息。
当采用自动结构时,发射器机构11000包括用于驱动传感器伸缩的动力装置3,及控制处理器4。
动力装置3设置在壳体11005内,与传感器的一端相连,具体的,如图39、图40所示,动力装置3至少包括直齿段31,可以与直齿段31啮合传动的传动杆32,及用于驱动传动杆32转动的动力源33。当传动杆32周向旋转,直齿段31线性往复运动,以带动传感器伸缩,达到调整传感器植入皮肤深度的目的。
在本实施例中,动力源33为电机,传动杆32为丝杆,传动杆32通过与直齿段31螺纹啮合运动,将运动传递给控制处理器4,实现控制处理器4在壳体11005的线性滑动。
为了便于装配,壳体11005包括底壳11和上盖12,上盖12连接有显示窗口13,显示窗口13通过柔性线组45与控制处理器4相连,用于显示传感器的植入深度、血糖值、血糖监测曲线、电量、WiFi/蓝牙连接等信息。如图52所示,显示窗口13显示传感器的植入深度h为6.32mm。
传动杆32转动连接在底壳11,底壳11的底部设有可与皮肤粘合的贴纸5,且在底壳11内形成用于放置控制处理器4的放置区。上盖12设置有供助针器的导引针6伸入的过针窗口17。
如图48、图49所示,底壳11上形成用于限制传感器活动范围的通道14,该通道14的折弯处形成自外向卡槽42所在方向、自下而上倾斜的引导面141。引导面141的设置便于传感器在受到引导面141的阻挡和引导作用下顺利弯折后向下移动,避免传感器移位。通道14的位置与助针器的过针窗口17上下对应。如图50所示,在传感器经过引导面141顺利弯折后,助针器的引导针6垂直向下移动辅助传感器植入皮肤,当完成植入后导引针6撤出。
为了保证传感器的垂直下移,也为了传感器的长度计算更准确,如图51所示,在底壳11上形成与通道14相连通的安装槽15,该安装槽15内连接有浮动弹球16,浮动弹球16从安装槽15内垂直伸出,将传感器压持在通道14侧壁。
如图45所示,控制处理器4包括电路板41,可以与传感器相连的卡槽42,芯片43,及用于连接电源441的安装支架44,上述的直齿段31设置在电路板41的侧边,为了限制直齿段31的平移距离,以及保证直齿段31的运动更平稳,在电路板41上还开设有行程槽411。
卡槽42、芯片43、安装支架44焊接在电路板41的上面,传感器头部固定于卡槽42中。使得控制处理器4线性滑动时带动传感器共同线性滑动,从而实现传感器电极植入深度的调节。
只有当传动杆32转动时,控制处理器4才会沿着行程槽411线性滑动,且控制处理器4具有单向运动特性,只能由传动杆32转动带动控制处理器4线性滑动。螺纹啮合传动具有较好的瞬时传动精度、传动平稳精度以及反向锁定特性。
卡槽42带动传感器在皮层中进行微调时,通过螺纹啮合传动特性,传感器不仅可以拉出皮层,传感器(尖端保护,使得传感器电极具有一定的锐度和硬度,可以刺破皮层)还可以极低的速度深入皮层,减轻用户的疼痛感和异物感。
如图41、图42所示,传动杆32沿箭头方向转动时,带动控制处理器4沿箭头方向移动,控制处理器4上的卡槽42带动传感器沿箭头方向移动,传感器伸出。此时显示窗口13会显示当前传感器在皮层中的深度。
如图43、图44所示,传动杆32沿箭头方向反向转动时,带动控制处理器4沿箭头方向反向移动,控制处理器4上的卡槽42带动传感器沿箭头方向移动,传感器缩回或撤回。此时显示窗口13会显示当前传感器在皮层中的深度。
如图47所示,传感器上设有监测触点21和充能触点22,正面的监测触点21包括工作电极和对电极,或者还包括参比电极。反面的为充能触点22,当控制处理器4的电源441不足时,控制处理器4会激活充能触点22工作,利用组织液中内源性物质作为燃料,把燃料中的化学能转化为电能供给控制处理器4,包括供给动力源33电机,实现无需更换电池,也可以延长发射器佩戴时间。当然,其他实施例中充能触点22在传感器植入人体后,就开始利用组织液中内源性物质作为燃料,把燃料中的化学能转化为电能供给发射器中控制处理器4,包括供给动力源33电机,延长发射器佩戴时间。本技术方案传感器可不设置充能触点22,工作电极和对电极可设置在一面,也可设置在对立面。当然上述的充能触点22何时实现功能的应用场景集合在芯片43上。
芯片43负责接收皮肤厚度的信号,该信号可以是由厚度检测单元传输过来,根据应用场景将该信号转换成脉冲信号或转数,最后发送至动力装置3,实现调整传感器的伸缩长度的目的,直至传感器植入目标深度。传感器的伸缩长度可以是金属探测器检测后传输过来,或是壳体11005内定位识别装置检测后传输过来。
当用户将传感器植入皮下后,使用金属探测器测量传感器植入深度,并将传感器植入深度共享给芯片43,或发射器壳体内置有定位识别装置,可以通过红外线等方式检测壳体内传感器L
具体的,传感器的伸缩长度计算公式为移动
当佩戴时间达到设定监测时间时,或者电源441电量耗尽,控制处理器4发送信号至动力装置3,将传感器整体缩回,撤回长度计算公式为L=n*P,其中n为转数,P为齿距,传动杆32的转速为60-100rpm/min。
厚度检测单元检测人体皮肤厚度,并将检测到的皮肤厚度信号通过无线或有线方式传输给发射器机构11000,发射器机构11000中的控制处理器4会比对皮肤厚度与传感器植入深度,分析得出移动L,由于步距角α、齿距P、移动L已知,驱动动力源33按照微调计算公式计算出脉冲信号y,通过此公式,控制处理器4可以精密地调节补偿植入误差。
当用户完成血糖监测时,需要移除发射器时,控制处理器4驱动动力源33按照上述的撤回计算公式撤回。或者说,当发射器机构11000佩戴时间达到设定监测时间时或电池电量耗尽(可以在显示窗口13看到电池电量),控制处理器4按照撤回长度计算公式L=n*P,驱动电机转动,通过螺纹啮合传动使得传感器线性滑动,实现传感器的回收。由于敷贴粘纸的作用,传统发射器在电池耗尽时,用户需要手动撕开贴纸直接拽出植入的传感器,取下时会拉扯植入部位周围的皮层,并产生一定的痛感和出血量,可能会造成感染,影响用户体验感。本技术方案可在不取下发射器机构11000的同时,完成对植入传感器进行移除,减缓了一定的痛感和出血量,提高用户使用舒适度。
上述具体实施方式用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。