一种全自动曝光机
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及PCB曝光技术领域,具体为一种全自动曝光机。
背景技术
在PCB板制造工艺中,最关键的工序之一就是将底片图像转移到基材上:先在基板上涂一层感光材料,然后对涂覆在基材上的感光材料进行光辐射,使其溶解性发生变化,而未感光部分的树脂没有发生聚合反应,在显影液的作用下便会溶解,感光部分的感光材料发生聚合反应固化在基材上形成图像,这一工艺过程即曝光。自动曝光机是指通过开启灯光发出UVLED平行光,将胶片或其他透明体上的图像信息转移到涂有感光物质的表面上的机器设备,已是半导体制造,PCB行业,被动元器件产业中不可或缺的主要生产设备。
经过大量检索,发现现有技术:公开号为CN106814555B,公开了一种自动曝光机。主要解决现在的自动曝光机的通常采用机械手来实现物料的输送,然而在应对厚度不同的PCB板时,由于没有厚度补偿的措施,容易出现设备的损伤的问题。本发明提供一种自动曝光机,其机架上沿物料进给方向设有输料导轨,输料导轨上设有活动配合的导板,导板上设有沿垂直方向作直线往复运动的用于固定物料的机械手,还包括与机械手对应设置的用于带动机械手运动的驱动装置,驱动装置包括用于推动机械手上升的推杆和用于拉动机械手下降的第一弹性件。在物料较厚的情况下,机械手与物料已经充分接触,然而驱动装置的推杆由于行程的原因仍然会下降与机械手分离,此时驱动装置通过第一弹性件与机械手连接,具有厚度补偿的功能,使用更加安全。
综上所述,曝光机是完成图形转移的关键设备之一,在PCB的制造过程中,具有非常重要的作用,现有的手动曝光机,需要人工进行底片与需曝光件之间的对位工作,一台手动曝光机需要一个操作人员,2-3个对位的辅助工人;近年来,市场上出现了采用摄像机进行自动对位的曝光机,每台设备也需要一个操作人员,由于受到设备技术条件的限制,在大部分情况下,只能进行单面自动对位,因而生产效率比手动曝光机低很多,为解决现有技术中的曝光机需要人工操作、自动化程度低,导致生产效率低的问题,而提供一种全自动曝光机。
发明内容
本发明的目的在于提供一种全自动曝光机,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种全自动曝光机,包括基板整齐机构、旋转上料仓、取料机械手、搬运机械手、CCD对位机构、曝光机构、旋转下料仓和曝光系统,所述曝光机构两侧对称设置有搬运机械手,两个所述搬运机械手相背离一端分别设置有旋转上料仓和旋转下料仓;
所述旋转上料仓和曝光机构之间设置有CCD对位机构,所述曝光机构上方设置有曝光系统。
优选的,所述旋转上料仓由上料分割器、上料导杆、上料夹仓底座、上料猪笼架仓夹和上料升降机构;
所述上料升降机构与上料夹仓底座相连接,且上料分割器与基板整齐机构均设置于上料夹仓底座一侧,所述上料猪笼架仓夹呈圆形阵列状分布于上料夹仓底座表面,所述上料猪笼架仓夹数量为六个,且上料导杆均对称分布于上料猪笼架仓夹两侧。
优选的,所述旋转下料仓由下料分割器、下料导杆、下料夹仓底座、下料猪笼架仓夹和下料升降机构;
所述下料升降机构与下料夹仓底座相连接,且下料分割器与基板整齐机构均设置于下料夹仓底座一侧,所述下料猪笼架仓夹呈圆形阵列状分布于下料夹仓底座表面,所述下料猪笼架仓夹数量为六个,且下料导杆均对称分布于下料猪笼架仓夹两侧。
优选的,所述取料机械手由取料驱动电机、取料直线导轨、取料构件固定座、取料真空吸块、取料气缸升降机构和吸块支架构成;
所述取料构件固定座上端搭载有取料驱动电机和取料直线导轨,且取料构件固定座一侧设置有吸块支架,所述吸块支架一侧分别设置有取料真空吸块和取料气缸升降机构。
优选的,所述搬运机械手由搬运驱动电机、搬运直线导轨、搬运构件固定座、Y型吸块和搬运气缸升降机构;
所述搬运构件固定座上方构建有搬运驱动电机和搬运直线导轨,且搬运气缸升降机构搭载于搬运直线导轨内部,所述搬运气缸升降机构内部设置有Y型吸块。
优选的,所述CCD对位机构由对位支架、翻盖、前后调节机构、旋转调节机构和左右调节机构;
所述翻盖设置于对位支架上方,且前后调节机构、旋转调节机构和左右调节机构均搭载于翻盖表面。
优选的,所述曝光机构由直线电机、对位平台、高精度升降机构、机械定位机构和拖链;
所述曝光机构主体为高精度升降机构,所述高精度升降机构上方设置有机械定位机构,所述高精度升降机构下方设置有对位平台,所述对位平台一侧分别设置有直线电机和拖链。
优选的,所述曝光系统由曝光输出口、曝光机构驱动电机、曝光机构直线导轨、水冷系统和参数调节模块;
所述曝光系统通过曝光机构驱动电机和曝光机构直线导轨进行驱动,所述曝光输出口位于曝光系统下方。
优选的,所述曝光机构上方设置有人工检查显微镜,所述曝光机构一侧设置有人机控制盒。
优选的,所述旋转上料仓、取料机械手、搬运机械手、CCD对位机构、曝光机构、旋转下料仓和曝光系统内部均搭载有光电感应系统。
与现有技术相比,本发明的有益效果是:本发明采用了猪笼架仓夹,可使得基板之间避免相互接触,可以减少基板之间出现的磨损,并采用CCD定位、机械定位双定位的方式,可以极大提高了基板的定位精度;同时能够实现全自动操作方式,可减少人工操作所需的人力资源投入和提高加工效率。
附图说明
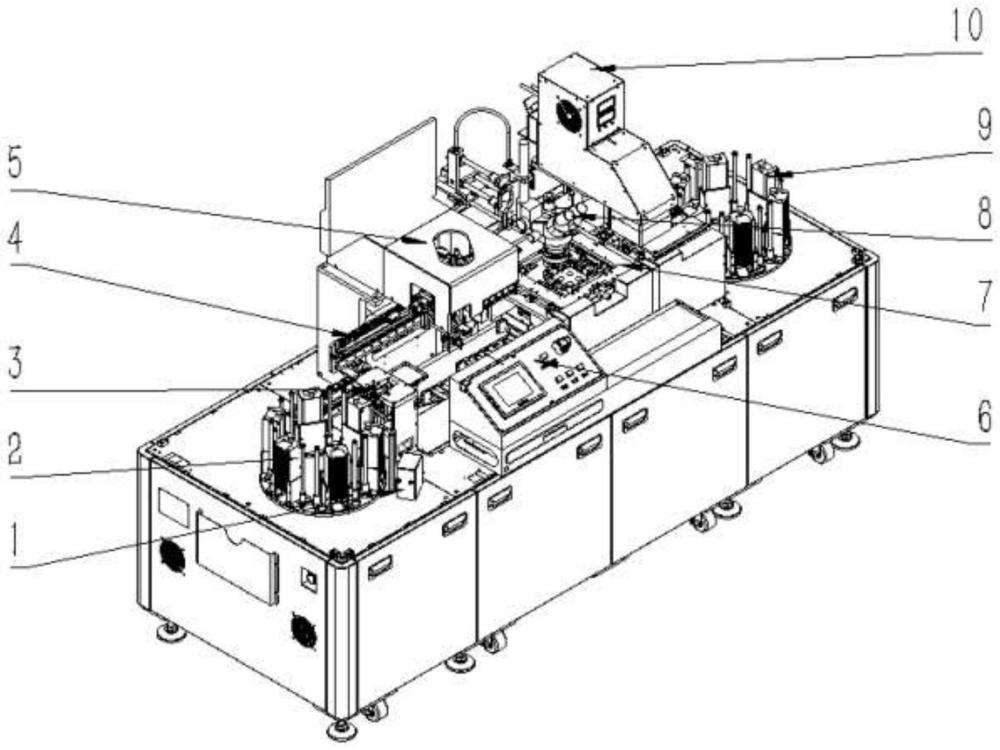
图1为本发明的曝光机外观主视结构示意图;
图2为本发明的旋转上料仓主视结构示意图;
图3为本发明的取料机械手主视结构示意图;
图4为本发明的搬运机械手主视结构示意图;
图5为本发明的CCD对位机构主视结构示意图;
图6为本发明的曝光机构主视结构示意图;
图7为本发明的旋转下料仓主视结构示意图;
图8为本发明的曝光系统主视结构示意图。
图中:1、基板整齐机构;2、旋转上料仓;21、上料分割器;22、上料导杆;23、上料夹仓底座;24、上料猪笼架仓夹;25、上料升降机构;3、取料机械手;31、取料驱动电机;32、取料直线导轨;33、取料构件固定座;34、取料真空吸块;35、取料气缸升降机构;36、吸块支架;4、搬运机械手;41、搬运驱动电机;42、搬运直线导轨;43、搬运构件固定座;44、Y型吸块;45、搬运气缸升降机构;5、CCD对位机构;51、对位支架;52、翻盖;53、前后调节机构;54、旋转调节机构;55、左右调节机构;6、人机控制盒;7、曝光机构;71、直线电机;72、对位平台;73、高精度升降机构;74、机械定位机构;75、拖链;8、人工检查显微镜;9、旋转下料仓;91、下料分割器;92、下料导杆;93、下料夹仓底座;94、下料猪笼架仓夹;95、下料升降机构;10、曝光系统;101、曝光输出口;102、曝光机构驱动电机;103、曝光机构直线导轨;104、水冷系统;105、参数调节模块;。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图8,本发明提供的三种实施例:
实施例一:
一种全自动曝光机,包括基板整齐机构1、旋转上料仓2、取料机械手3、搬运机械手4、CCD对位机构5、曝光机构7、旋转下料仓9和曝光系统10,曝光机构7两侧对称设置有搬运机械手4,两个搬运机械手4相背离一端分别设置有旋转上料仓2和旋转下料仓9;
旋转上料仓2和曝光机构7之间设置有CCD对位机构5,曝光机构7上方设置有曝光系统10。
旋转上料仓2由上料分割器21、上料导杆22、上料夹仓底座23、上料猪笼架仓夹24和上料升降机构25;
上料升降机构25与上料夹仓底座23相连接,且上料分割器21与基板整齐机构1均设置于上料夹仓底座23一侧,上料猪笼架仓夹24呈圆形阵列状分布于上料夹仓底座23表面,上料猪笼架仓夹24数量为六个,且上料导杆22均对称分布于上料猪笼架仓夹24两侧。
基板通过六工位旋转上料仓2进行上料;通过上料分割器21,实现了六工位旋转料仓自动切换料仓和定位料仓的位置功能。通过基板整齐机构1保证料片不凸出料仓夹,上料升降机构25通过控制系统和光电感应系统来实现料片上料的连续性。
旋转下料仓9由下料分割器91、下料导杆92、下料夹仓底座93、下料猪笼架仓夹94和下料升降机构95;
下料升降机构95与下料夹仓底座93相连接,且下料分割器91与基板整齐机构1均设置于下料夹仓底座93一侧,下料猪笼架仓夹94呈圆形阵列状分布于下料夹仓底座93表面,下料猪笼架仓夹94数量为六个,且下料导杆92均对称分布于下料猪笼架仓夹94两侧。基板通过六工位旋转下料仓9进行上料;通过下料分割器91,实现了六工位旋转料仓自动切换料仓和定位料仓的位置功能。通过基板整齐机构1保证料片不凸出料仓夹,下料升降机构95通过控制系统和光电感应系统来实现料片上料的连续性。使用六工位的猪笼架仓夹供收料模组,可将整批产品分层放入供料仓内,相较传统上下料,提高了整机效率,且减少产品之间的磨损。
实施例二:
取料机械手3由取料驱动电机31、取料直线导轨32、取料构件固定座33、取料真空吸块34、取料气缸升降机构35和吸块支架36构成;
取料构件固定座33上端搭载有取料驱动电机31和取料直线导轨32,且取料构件固定座33一侧设置有吸块支架36,吸块支架36一侧分别设置有取料真空吸块34和取料气缸升降机构35。实现了在六工位旋转上料仓2和旋转下料仓9里自动吸取料片功能。实现料片的搬送,从而达到整机的连动性。
搬运机械手4由搬运驱动电机41、搬运直线导轨42、搬运构件固定座43、Y型吸块44和搬运气缸升降机构45;
搬运构件固定座43上方构建有搬运驱动电机41和搬运直线导轨42,且搬运气缸升降机构45搭载于搬运直线导轨42内部,搬运气缸升降机构45内部设置有Y型吸块44。人员将装好料的仓夹放入旋转上料仓2中,上料分割器21运转,将有料仓夹替换进上料工位,上料升降机构25将上料猪笼架仓夹24顶升至指定高度,取料机械手3搬运基板,进行粗定位,搬运机械手4搬运基板,送入CCD对位机构5。利用CCD进行定位,定位完成后,CCD对位机构5运行至曝光机构7下方,进行曝光,曝光完成后,取料机械手3搬运基板,将料送入旋转下料仓9。
实施例三:
CCD对位机构5由对位支架51、翻盖52、前后调节机构53、旋转调节机构54和左右调节机构55;通过前后调节机构53、旋转调节机构54和左右调节机构55,实现了菲林片对基板片的前后调节对位、左右调节对位、旋转调节对位,使得基板定位更加准确。在产品放在CCD对位机构5前对产品进行初步定位,减少了产品在CCD对位机构5上的定位时间,提高了效率。
翻盖52设置于对位支架51上方,且前后调节机构53、旋转调节机构54和左右调节机构55均搭载于翻盖52表面。
曝光机构7由直线电机71、对位平台72、高精度升降机构73、机械定位机构74和拖链75;实现料片的曝光和搬送,从而达到整机的连动性。
曝光机构7主体为高精度升降机构73,高精度升降机构73上方设置有机械定位机构74,高精度升降机构73下方设置有对位平台72,对位平台72一侧分别设置有直线电机71和拖链75。
曝光系统10由曝光输出口101、曝光机构驱动电机102、曝光机构直线导轨103、水冷系统104和参数调节模块105;曝光输出口101由四寸LED平行光源构成。
曝光系统10通过曝光机构驱动电机102和曝光机构直线导轨103进行驱动,曝光输出口101位于曝光系统10下方。
曝光机构7上方设置有人工检查显微镜8,曝光机构7一侧设置有人机控制盒6,可以根据系统记录数据方便客户进行拷贝分析。
旋转上料仓2、取料机械手3、搬运机械手4、CCD对位机构5、曝光机构7、旋转下料仓9和曝光系统10内部均搭载有光电感应系统。
人员将装好料的仓夹放入旋转上料仓2中,上料分割器21运转,将有料仓夹替换进上料工位,上料升降机构25将上料猪笼架仓夹24顶升至指定高度,取料机械手3搬运基板,进行粗定位,搬运机械手4搬运基板,送入CCD对位机构5,利用CCD进行定位,定位完成后,CCD对位机构5运行至曝光机构7下方,进行曝光,曝光完成后,取料机械手3搬运基板,将料送入旋转下料仓9。使用六工位的猪笼架仓夹供收料模组,可将整批产品分层放入供料仓内,相较传统上下料,提高了整机效率,且减少产品之间的磨损,在产品放在CCD对位机构5前对产品进行初步定位,减少了产品在CCD对位机构5上的定位时间,提高了效率。
并且采用CCD对位机构5以及机械定位双定位系统,极大地提高了基板定位的精度,减少定位时间。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。