一种民机着陆自动刹车控制系统及其控制方法
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及民用飞机制动技术领域,尤其是涉及一种民机着陆自动刹车控制系统及其控制方法。
背景技术
飞机起落架刹车系统在飞机的起飞阶段和着陆阶段,有着重要的作用,关系着飞机能否安全着陆或及时停止起飞。自动刹车系统则减轻了飞行员的操作负担,提高了飞行员驾驶的容错率。
当前民用飞机的自动刹车系统,采用在固定的时刻激活刹车系统,达到飞机减速的效果。这种刹车方式,根据跑道情况,由飞行员提前设置飞机的自动刹车档位,控制刹车力的大小。目前,自动刹车系统控制只是在刹车时机的选择上进行控制,或是提高刹车时机的触发的正确性,防止出现误报、无法激活等结果。
当前使用的自动刹车系统虽然可以满足飞机基本的起降要求,但仍有以下几方面缺陷:
首先,由于该方式是飞机触地后,直接产生一个极大的刹车力完成减速,飞机从高速直接受力减速,对旅客的舒适程度造成了很大影响;其次,一旦飞行员对自动刹车系统的档位设置出现偏差,就容易造成飞机冲出跑道或起落架损伤等致命问题;最后,目前采用的自动刹车控制方式,是直接将飞机减速至滑跑速度,但过早的降低飞机的滑跑速度,飞机需要花费更多的时间驶离跑道,降低了跑道的使用效率。
为此,需要提出一种可以解决飞机着陆后自动刹车系统减速过快,对旅客舒适度造成影响,同时可以提高跑道利用率,可更进一步的降低驾驶员的操作负担的民机着陆自动刹车控制方法。
发明内容
为解决现有技术中的问题,本发明提供了一种民机着陆自动刹车控制系统及其控制方法,其改善了由于飞机着陆后自动刹车系统减速过快,对旅客舒适度造成影响的缺陷,同时,其可降低驾驶员的操作负担,提高了驾驶员操作容错率,增强了飞机着陆的安全性。
为实现上述目的,本发明提供如下技术方案:一种民机着陆自动刹车控制系统,其包括
跑道状态选择模块,用于获取飞机将要着陆的跑道状态;
跑道数据库,用于存储机场跑道的数据;
跑道信息模块,用于收集飞机着陆跑道的编号、跑道脱离口的编号,并通过跑道数据库获取机场跑道的数据;
飞行管理系统,用于获取着陆机场当前的风速和风向,以及提供着陆飞机的构型,并将其发送给位置计算模块;
ADIRU模块(Air Data Inertial Reference Units,大气数据惯性基准组件),用于提供飞机的实时参数,并将飞机的实时参数实时发送给位置计算模块、刹车控制系统、自动驾驶系统;
位置计算模块,接受跑道信息模块发送来的着陆跑道编号、跑道脱离口的编号、以及机场跑道数据,结合ADIRU模块发送的飞机的实时参数,实时计算飞机与跑道脱离口之间的距离,并该距离信息实时更新提供给刹车控制系统;
自动驾驶系统,用于接收需要刹车的目标速度,以及根据ADIRU模块提供的飞机的实时参数,通过自动油门控制飞机的速度;
自动刹车系统,用于获取飞机的刹车的减加速度,以及控制飞机的刹车进行自动刹车;
刹车控制系统,通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的刹车,进行飞机刹车减速。
优选的技术方案,所述跑道状态选择模块可将获取的飞机将要着陆的跑道状态分别对应划分为干跑道、湿跑道、污染跑道。
优选的技术方案,所述跑道数据库存储的机场跑道的数据包括跑道的起点位置信息、跑道的终点位置信息、跑道脱离口的位置信息。
优选的技术方案,所述ADIRU模块提供的飞机的实时参数包括实时的飞机的经纬度、飞机的地速、飞机的航向。
优选的技术方案,所述民机着陆自动刹车控制系统还包括:
飞行控制系统,用于获取减速板的减加速度;
刹车控制系统,通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度、自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的减速板和刹车,进行飞机刹车减速。
优选的技术方案,所述民机着陆自动刹车控制系统还包括:
发动机系统,用于获取飞机的反推的减加速度;
刹车控制系统,通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合发动机系统提供的反推的减加速度、自动刹车系统提供的减加速度进行PID动态控制飞机的反推和刹车,进行飞机刹车减速。
优选的技术方案,所述民机着陆自动刹车控制系统还包括:
飞行控制系统,用于获取减速板的减加速度;
发动机系统,用于获取飞机的反推的减加速度;
刹车控制系统,通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度、发动机系统提供的反推的减加速度、自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的减速板、反推、刹车,进行飞机刹车减速。
本申请还提供一种民机着陆自动刹车控制方法,其包括以下步骤:
步骤一、通过机场空管确认飞机的着陆跑道的编号和飞机驶离跑道脱离口的编号,并通过跑道数据库查询出对应跑道脱离口的位置信息;
步骤二、根据着陆跑道的实际情况,在跑道状态选择模块选择对应着陆跑道为干跑道、湿跑道或者污染跑道,在自动刹车系统中确认需要刹车的目标速度的目标减加速度值;
步骤三、在位置计算模块确定刹车需要的目标距离和目标速度;
步骤四、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合自动刹车系统提供的刹车减加速度进行PID动态控制飞机的自动刹车系统的刹车减加速度,进行飞机刹车减速。
优选的技术方案,其还包括以下步骤:
步骤五、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度进行PID动态控制飞机的减速板,进行飞机刹车减速;
步骤六、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合发动机系统提供的反推的减加速度进行PID动态控制飞机的反推,进行飞机刹车减速。
本申请还提供一种民机着陆自动刹车控制方法,其包括以下步骤:
步骤一、通过机场空管确认飞机的着陆跑道的编号和飞机驶离跑道脱离口的编号,并通过跑道数据库查询出对应跑道脱离口的位置信息;
步骤二、根据着陆跑道的实际情况,在跑道状态选择模块选择对应着陆跑道为干跑道、湿跑道或者污染跑道,在自动刹车系统中确认需要刹车的目标速度的目标减加速度值;
步骤三、确定刹车需要的目标距离和目标速度 ;
步骤四、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度、发动机系统提供的反推的减加速度、自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的减速板、反推、刹车,进行飞机刹车减速。
优选的技术方案,上述控制方法还包括以下步骤:
步骤五、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度进行PID动态控制飞机的减速板,进行飞机刹车减速;
步骤六、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合发动机系统提供的反推的减加速度进行PID动态控制飞机的反推,进行飞机刹车减速。
本发明还提供一种民机着陆自动刹车控制方法,其包括以下步骤:
步骤一、通过机场空管确认飞机的着陆跑道的编号和飞机驶离跑道脱离口的编号,并通过跑道数据库查询出对应跑道脱离口的位置信息;
步骤二、根据着陆跑道的实际情况,在跑道状态选择模块选择对应着陆跑道为干跑道、湿跑道或者污染跑道,在自动刹车系统中确认需要刹车的目标速度的目标减加速度值;
步骤三、在位置计算模块确定刹车需要的目标距离和目标速度;
步骤四、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度、发动机系统提供的反推的减加速度、自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的减速板、反推、刹车,进行飞机刹车减速。
与现有技术相比,本发明一种民机着陆自动刹车控制系统及其控制方法的有益效果是:
1、利用飞机的定位系统和机场数据库信息,结合自动飞行系统和自动刹车系统,通过动态的控制发动机反推的打开时长,减速板的打开时长,来确定自动刹车系统的刹车力大小,并通过自动飞行系统中的自动油门系统控制发动机的推力大小,从而使飞机以最短的时间到达选定的跑道脱离出口,并且速度满足选定的目标滑跑速度。通过多个系统参与的刹车减速方式,使得减速过程更加平滑,节省了飞机从着陆至离开跑道的时间,大大降低了跑道的占用率,从而提高了整个机场的运行效率,也提高了旅客的乘坐舒适度。
2、本发明新增的位置计算模块和刹车控制系统,可直接耦合原始飞机的自动驾驶系统、自动刹车系统、发动机系统、飞行控制系统等模块,不会对飞机的底层逻辑进行改动,降低了执行的风险。利用自动驾驶系统中的自动油门控制,接收飞机着陆减速要求的最终速度,即10kt,当飞机着陆后,激活自动油门模式,控制油门杆开度,完成速度控制。
3、本发明的自动刹车控制系统和自动刹车控制方法,让反推控制和减速板控制更多的参与了着陆后的减速工作,克服了传统的方式是按照固定的时长进行反推和减速板打开的操作缺陷,通过控制反推和减速板的打开时长,增加了着陆后的减速效率。
4、本发明的民机着陆自动刹车控制系统和控制方法,可以根据跑道状态对自动刹车系统进行动态的控制,降低了飞行员的操作负担。
5、传统的减速方式为迅速降低至滑行速度10kt,本发明是逐渐平滑降低至10kt,飞机速度降低至10kt时,本发明的减速方式所滑行的距离更大,飞机占用跑道时间降低,从而提高了整个机场的运行效率。
6、本发明采用多系统参与着陆后的减速,包括飞行控制系统、发动机系统和自动刹车系统,动态的调整了各系统参与着陆减速的时长,动态控制自动刹车系统的刹车力,使得飞机着陆后的减速过程变得更加高效、可控。
7、本发明的位置计算模块让飞机的实时位置与脱离口的距离参与到飞机的实时状态控制中,让整个减速过程可控,由计算机自行完成,降低了误操作率,同时也降低了飞行员的负担。
8、飞机从着陆到离开跑道的时间缩短,降低了跑道的占用率,从而提高了整个机场的运行效率,对整个机场的运行,甚至空域的利用率都会大大提高。
9、本发明的刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度、发动机系统提供的反推的减加速度、自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的减速板、反推、刹车,进行飞机刹车减速。本发明是让飞机是持续的平滑减速,而非突然减速,提高了旅客的乘坐舒适度和着陆安全。
附图说明
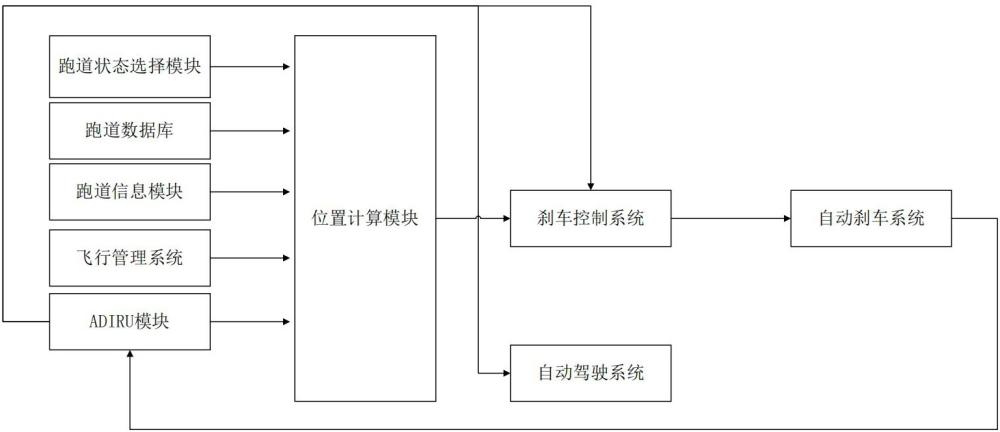
图1为本发明实施例1的一种民机着陆自动刹车控制系统的整体系统架构图;
图2为本发明实施例2的一种民机着陆自动刹车控制系统的整体系统架构图;
图3为本发明实施例3的一种民机着陆自动刹车控制系统的整体系统架构图;
图4为本发明实施例3的一种民机着陆自动刹车控制系统的自动驾驶系统的自动油门控制示意图;
图5为本发明实施例3的一种民机着陆自动刹车控制系统的原理示意图;
图6为本发明实施例3的一种民机着陆自动刹车控制系统在飞机着陆后控制飞机的减加速度的过程曲线示意图;
图7为应用本发明实施例3的一种民机着陆自动刹车控制系统的控制方法步骤示意图。
实施方式
实施例1,如图1所示,一种民机着陆自动刹车控制系统,包括:
跑道状态选择模块,用于获取飞机将要着陆的跑道状态;所述跑道状态选择模块可将获取的飞机将要着陆的跑道状态分别对应划分为干跑道、湿跑道、污染跑道,每种跑道状态对应不同的刹车减速率,具体的为飞行员根据机场管制的通知并参考天气条件,在跑道状态选择模块中选择对应的跑道状态。
跑道数据库,用于存储机场跑道的数据;所述跑道数据库存储的机场跑道的数据包括跑道的起点位置信息、跑道的终点位置信息、跑道脱离口的位置信息,其它模块通过查询跑道数据库可获取机场跑道的数据,包括不同的跑道位置的经纬度等位置信息。
跑道信息模块,用于收集飞机着陆跑道的编号、跑道脱离口的编号,并通过跑道数据库获取机场跑道的数据;跑道信息模块可将收集到的信息发送给位置计算模块。
飞行管理系统,用于获取着陆机场当前的风速和风向,以及提供着陆飞机的构型,并将其发送给位置计算模块;
ADIRU模块,用于提供飞机的实时参数,并将飞机的实时参数实时发送给位置计算模块、刹车控制系统、自动驾驶系统;所述ADIRU模块提供的飞机的实时参数包括实时的飞机的经纬度、飞机的地速、飞机的航向等信息。
位置计算模块,接受跑道信息模块发送来的着陆跑道编号、跑道脱离口的编号、以及机场跑道数据,结合ADIRU模块发送的飞机的实时参数,实时计算飞机与跑道脱离口之间的距离,并该距离信息实时更新提供给刹车控制系统;
自动驾驶系统,用于接收需要刹车的目标速度,以及根据ADIRU模块提供的飞机的实时参数,通过自动油门控制飞机的速度;
自动刹车系统,用于获取飞机的刹车的减加速度,以及控制飞机的刹车进行自动刹车;
刹车控制系统,通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的刹车,进行飞机刹车减速。
应用本实施例1的一种民机着陆自动刹车控制系统的控制方法如下:
步骤一、飞行员通过机场空管确认飞机的着陆跑道的编号和飞机驶离跑道脱离口的编号,并通过跑道数据库查询出对应跑道脱离口的位置信息;
步骤二、根据着陆跑道的实际情况,在跑道状态选择模块选择对应着陆跑道为干跑道、湿跑道或者污染跑道,在自动刹车系统中确认需要刹车的目标速度的目标减加速度值;
步骤三、在位置计算模块确定刹车需要的目标距离和目标速度;
步骤四、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合自动刹车系统提供的刹车减加速度进行PID动态控制飞机的自动刹车系统的刹车减加速度,进行飞机刹车减速。
实施例2,如图2所示,一种民机着陆自动刹车控制系统,包括:
跑道状态选择模块,用于获取飞机将要着陆的跑道状态;所述跑道状态选择模块可将获取的飞机将要着陆的跑道状态分别对应划分为干跑道、湿跑道、污染跑道,每种跑道状态对应不同的刹车减速率,具体的为飞行员根据机场管制的通知并参考天气条件,在跑道状态选择模块中选择对应的跑道状态。
跑道数据库,用于存储机场跑道的数据;所述跑道数据库存储的机场跑道的数据包括跑道的起点位置信息、跑道的终点位置信息、跑道脱离口的位置信息,其它模块通过查询跑道数据库可获取机场跑道的数据,包括不同的跑道位置的经纬度等位置信息。
跑道信息模块,用于收集飞机着陆跑道的编号、跑道脱离口的编号,并通过跑道数据库获取机场跑道的数据;跑道信息模块可将收集到的信息发送给位置计算模块。
飞行管理系统,用于获取着陆机场当前的风速和风向,以及提供着陆飞机的构型,并将其发送给位置计算模块;
ADIRU模块,用于提供飞机的实时参数,并将飞机的实时参数实时发送给位置计算模块、刹车控制系统、自动驾驶系统;所述ADIRU模块提供的飞机的实时参数包括实时的飞机的经纬度、飞机的地速、飞机的航向等信息。
位置计算模块,接受跑道信息模块发送来的着陆跑道编号、跑道脱离口的编号、以及机场跑道数据,结合ADIRU模块发送的飞机的实时参数,实时计算飞机与跑道脱离口之间的距离,并该距离信息实时更新提供给刹车控制系统;
自动驾驶系统,用于接收需要刹车的目标速度,以及根据ADIRU模块提供的飞机的实时参数,通过自动油门控制飞机的速度;
自动刹车系统,用于获取飞机的刹车的减加速度,以及控制飞机的刹车进行自动刹车;
飞行控制系统,用于获取减速板的减加速度;
刹车控制系统,通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度、自动刹车系统提供的刹车的减加速度进行PID动态控制飞机的减速板和刹车,进行飞机刹车减速。
应用本实施例2的一种民机着陆自动刹车控制系统的控制方法如下:
步骤一、飞行员通过机场空管确认飞机的着陆跑道的编号和飞机驶离跑道脱离口的编号,并通过跑道数据库查询出对应跑道脱离口的位置信息;
步骤二、根据着陆跑道的实际情况,在跑道状态选择模块选择对应着陆跑道为干跑道、湿跑道或者污染跑道,在自动刹车系统中确认需要刹车的目标速度的目标减加速度值;
步骤三、在位置计算模块确定刹车需要的目标距离和目标速度;
步骤四、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合自动刹车系统提供的刹车减加速度进行PID动态控制飞机的自动刹车系统的刹车减加速度,进行飞机刹车减速。
步骤五、刹车控制系统通过实时从位置计算模块获取的飞机与跑道脱离口之间的距离和从ADIRU模块获取的飞机实时参数,结合飞行控制系统提供的减速板的减加速度进行PID动态控制飞机的减速板,进行飞机刹车减速。
实施例3,如图3至图7所示,一种民机着陆自动刹车控制系统包括跑道状态选择模块、跑道数据库、跑道信息模块、ADIRU模块(Air Data Inertial Reference Units,又称为:大气数据惯性基准组件)、位置计算模块、刹车控制系统、自动驾驶系统、飞行控制系统、自动刹车系统和发动机系统。跑道状态选择模块可以获取飞机将要着陆的跑道状态,该跑道状态选择模块可对机场跑道状态进行分级,分为干跑道、湿跑道和污染跑道三种,每种跑道对应不同的刹车减速率,飞行员根据机场管制的通知并参考天气条件选择对应的跑道状态。跑道数据库包括了机场跑道的各种数据,如跑道的起点位置、跑道的终点位置、跑道每个脱离口的位置信息等,其他的模块可通过查询跑道数据库获取不同的位置经纬度。跑道信息模块可收集飞机着陆跑道的编号、跑道脱离口的编号,并通过查询跑道数据库,获取跑道的起点的经纬度、跑道的终点的经纬度和已选跑道脱离口的经纬度信息。飞行管理系统,可提供着陆机场的风速和风向,飞机的构型。位置计算模块可计算位置信息。ADIRU模块为整个控制系统提供飞机的实时参数,包括飞机的实时经纬度、飞机的地速、飞机的航向等,将这些数据发送给位置计算模块、刹车控制系统和自动驾驶系统,用于实时计算飞机距跑道脱离口的距离,并反馈给刹车控制系统用以控制飞机的速度。位置计算模块,可接收跑道脱离口的位置信息,结合飞机当前地速和实时位置信息,计算飞机与跑道脱离口的距离,不断更新飞机与跑道脱离口的距离信息提供给刹车控制系统。自动驾驶系统可根据刹车的目标速度(一般定为10kt)和飞机实时的速度,通过自动油门控制飞机的速度。刹车控制系统,通过接收位置计算模块发来的飞机与跑道脱离口的实时距离,ADIRU模块发来的飞机实时地速,结合发动机系统中反推提供的减加速度,飞行控制系统中减速板提供的减加速度,通过PID动态控制控制反推和减速板的开启时长(在不超过发动机反推开启时间上限和减速板开启时间上限的情况下),达到多系统配合实现飞机平滑减速的目的。
如图4所示,本发明可直接耦合自动驾驶系统,不会对飞机的底层逻辑进行改动,降低了执行的风险。利用自动驾驶系统中的自动油门控制,接收飞机着陆减速要求的最终速度,即10kt,当飞机着陆后,激活自动油门模式,控制油门杆开度,完成速度控制。
如图5所示,刹车控制系统根据在跑道状态模块选择的跑道状态确定自动刹车系统所使用的目标减加速度,干跑道和湿跑道可采用0.2g的目标减加速度,若无法完成减速可增加至0.35g;污染跑道采用0.3g的目标减加速度,若无法完成减速可增加至0.35g。刹车控制系统通过PID控制,输出反推打开的时长指令(也即是反推持续时间)给发动机系统、刹车压力的大小指令到自动刹车系统、减速板打开的时长指令(也即是减速板打开时间)到飞行控制系统。如图6所示,飞机触地激活自动刹车系统,减加速度提升至目标减加速度,当减速至目标速度10kt时,提前减小减加速度,直至速度保持为10kt,进行滑行。
应用本实例3的民机着陆自动刹车控制系统的具体执行步骤如图7所示。
步骤一,获取跑道出口位置,通过机场空管确认本次飞行的着陆跑道和飞机驶离跑道脱离口的编号,并通过跑道数据库查询出跑道脱离口的具体经纬度。
步骤二,确认跑道状态,在跑道状态选择模块选择着陆跑道状态(根据实际着陆情况选择干跑道、湿跑道或者污染跑道),刹车控制系统根据跑道状态模块确定的跑道状态,确定自动刹车系统将要使用的目标减加速度值为0.2g或0.3g(其中干跑道或者湿跑道自动确定为0.2g,污染跑道自动确定为0.3g)。
步骤三,确定目标距离和目标速度,即在位置计算模块确认本次着陆飞机距离跑道脱离口距离为多少米(例如本实施例可选择60米,该目标距离也可以成为安全距离,即在着陆飞机达到该安全距离时,应强制减速至目标速度)时,减速至目标速度(10kt)。
步骤四,解算飞机与跑道脱离口距离,通过位置计算模块实时计算飞机与跑道脱离口的实时距离,并将该实时距离实时发送给刹车控制系统,刹车控制系统根据反馈的实时距离,不断调整控制指令。
步骤五,刹车控制系统控制输出起落架刹车指令、发动机反推指令和减速板指令。即刹车控制系统接收到飞机与跑道脱离口的实时距离,调整控制指令,输出反推打开时长,减速板打开时长以及自动刹车系统的刹车减速度。
步骤六,自动驾驶系统速度控制,自动驾驶系统根据目标速度不断改变发动机推力,使飞机速度与10kt的目标速度进行匹配。
步骤七,ADIRU模块将飞机实时参数发送给位置计算模块和刹车控制系统,判断飞机是否能够满足目标距离和目标速度,若在目标距离满足目标速度,则减速结束,飞机滑行脱离跑道;若已经达到目标距离,仍无法满足目标速度,刹车控制系统则对自动刹车系统发出使用最大刹车力将飞机减速至滑行速度。
本发明设置的目标距离为安全距离,可以在有效保障乘坐舒适度的情况下,更有效的保证安全,使得着陆飞机在到达跑道脱离口的时候一定是满足目标速度离开跑道脱离口的。
以上仅为本发明的较佳实施例而已,并不用以限制本发明,应当指出的是,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。