一种乒乓球发球机
文献发布时间:2023-06-19 19:20:08
技术领域
本发明属于体育器械技术领域,具体涉及一种乒乓球发球机。
背景技术
乒乓球作为我国的国球,受众人群非常广泛,上至七旬老叟下至垂髫少儿都非常喜欢这项运动,更多人把它当作爱好运动,其中不乏专业的运动员。
本专利设计了一款乒乓球发球机,就避免了无人陪练的处境,让更多喜欢热爱乒乓球的人可以得到充分的练习,而且还节省了人力物力。
该乒乓球发球机可以发射不同角度、不同高度、不同频率的球,可以满足对不同球型的锻炼需求,并且可以有效提高运动员的反应速度,提高身体协调性。
发明内容
为了解决上述存在的问题,本发明提出:一种乒乓球发球机,包括储运球机构、抬升机构、水平旋转机构、俯仰机构、发球旋向旋转机构和发射机构,所述储运球机构上设置抬升机构,抬升机构通过水平旋转机构与俯仰机构相连,俯仰机构通过发球旋向旋转机构与发射机构相连。
本发明的有益效果为:本发明不仅能够调节发球的角度,还能调节发球的方向,进球筒内放有多个乒乓球,该装置能持续有时间间隔的进行发球。
附图说明
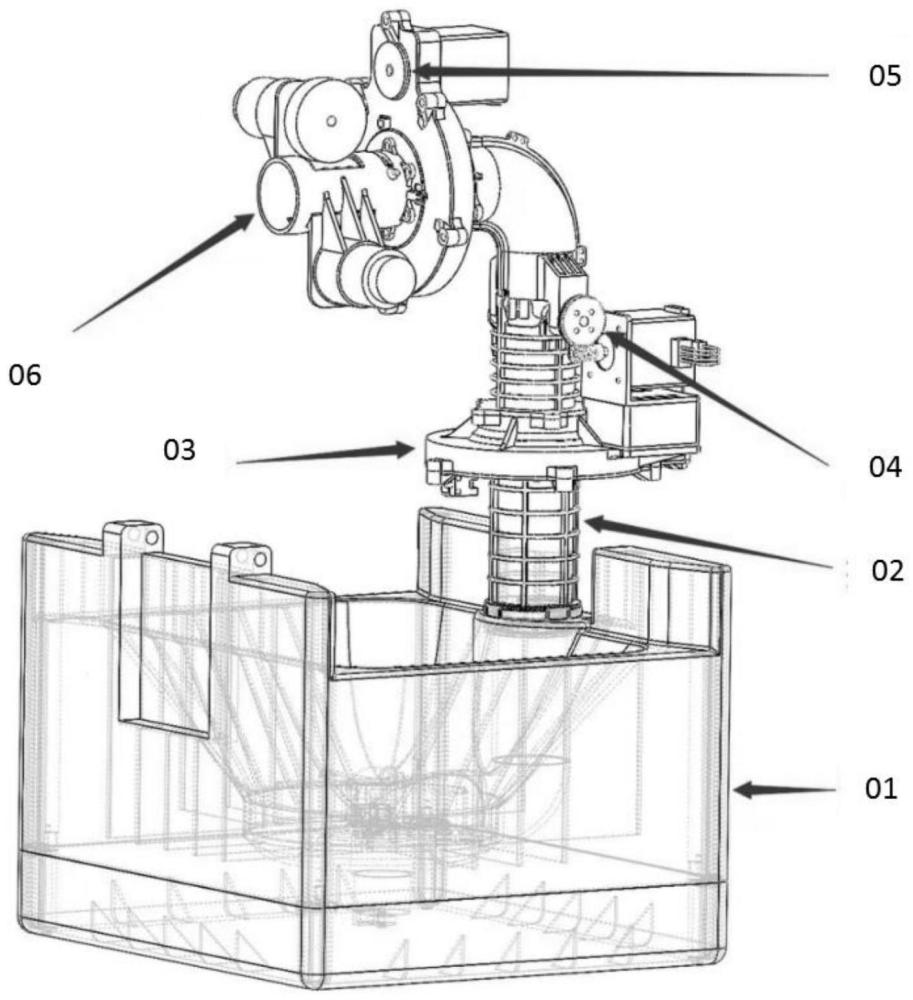
图1为本发明整体结构示意图;
图2为本发明实施例分解结构示意图;
图3为本发明实施例平台底座结构示意图;
图4为本发明实施例俯视结构示意图;
图5为本发明实施例正面结构示意图;
图6为流程图;
图7为轨迹图;
其中,附图标记为:01、储运球机构,02、抬升机构,03、水平旋转机构,04、俯仰机构,05、发球旋向旋转机构,06、发射机构,1、上旋转平台底座,2、大齿轮,3、上旋转平台,4、俯仰弯管,5、俯仰限位触发块,6、步进电机,7、二阶抬升座,8、主平台,9、推力球轴承,10、亚克力增高板,11、小齿轮,12、主平台底座,13、抬升座,14、转接管,15、上球电机,16、推球块连接件,17、拨球块,18、底座,19、储球平台,20、摩擦轮,21、直流调速电机,22、光电传感器,23、发射头,24、蜗轮,25、蜗杆,26、步进电机转接架,27、俯仰步进电机支架座,28、光电开关挡片,29、俯仰光电开关。
具体实施方式
实施例1
一种乒乓球发球机,如图1-图7所示,包括储运球机构01、抬升机构02、水平旋转机构03、俯仰机构04、发球旋向旋转机构05和发射机构06,所述储运球机构01上设置抬升机构02,抬升机构02通过水平旋转机构03与俯仰机构04相连,俯仰机构04通过发球旋向旋转机构05与发射机构06相连。
其中,所述储运球机构01包括储球平台19、底座18、拨球块17、推球块连接件16和上球电机15,所述储球平台19设置在底座18上,上球电机15通过推球块连接件16与拨球块17相连,上球电机15设置在底座18上,上球电机15设置在储球平台19下方,上球电机15的型号为MD36N。
其中,所述抬升机构02包括二阶抬升座7、抬升座13,所述储运球机构01通过转接管14与抬升机构02的送球管道相连,送球管道设置在二阶抬升座7中,二阶抬升座7上设置抬升座13。
其中,所述水平旋转机构03包括大齿轮2、主平台8、推力球轴承9、亚克力增高板10、小齿轮11、主平台底座12、光电传感器22,送球管道的上端外壁设置主平台8,主平台8内侧底部与推力球轴承9相连,推力球轴承9下部设置亚克力增高板10,亚克力增高板10盖住大齿轮2,步进电机6固定在主平台8上,小齿轮11固定在步进电机6上并与大齿轮2相连,大齿轮2固定在抬升座13上,使得主平台8水平旋转,主平台8外侧底部与主平台底座12固定连接,主平台底座12是主平台8与大齿轮2的扣合件,主平台底座12上设置光电传感器22,所述光电传感器22的型号为PM-U25,所述推力球轴承9的型号为SKF51109。
其中,所述俯仰机构04包括俯仰弯管4,所述俯仰弯管4的上端设置上旋转平台底座1,上旋转平台底座1上设置上旋转平台3,发球旋向旋转机构05设置在上旋转平台3上。
其中,所述水平旋转机构03还包括平衡弹簧,平衡弹簧的两端分别与俯仰弯管4和主平台8连接。
其中,所述俯仰机构04包括俯仰弯管4、俯仰限位触发块5、步进电机6、蜗轮24、蜗杆25、步进电机转接架26、俯仰步进电机支架座27、光电开关挡片28、俯仰光电开关29,步进电机6通过步进电机转接架26和俯仰步进电机支架座27安装在主平台8上,由步进电机6与蜗杆25相连,蜗杆25与俯仰弯管4上的蜗轮24相连,蜗轮24旋转带动俯仰弯管4、俯仰限位触发块5实现俯仰角度的调节,俯仰限位触发块5顶部到达最低点时触发俯仰光电开关29的光电开关挡片28反馈给系统,系统识别到初始位置。
其中,所述发射机构06包括摩擦轮20、发射头23,型号为MG545的直流调速电机21与摩擦轮20连接,发射头23通过上旋转平台底座1与俯仰俯仰弯管4的上端连接,发射头23上对称设置两个摩擦轮20。
如图1所示,一种储运机构,将从储球平台中落下的乒乓球送到主球道中,在拨球块的作用下,推动螺旋导轨的乒乓球前进,乒乓球沿着拨球块的斜面自下而上的运动,从而进入主球道。
如图2所示,主旋转机构与机头旋转机构传动形式相同,伺服电机带动直齿小齿轮,与旋转盘大齿轮啮合传动,实现不同方向旋转自由度。俯仰机构由蜗轮蜗杆传动机构组成,伺服电机带动蜗杆,与蜗轮传动带动整个上端发射机构实现俯仰运动。
发射机构,摩擦轮在支架支承下自由转动,与机头管相接触的地方切口,保证摩擦轮与乒乓球接触后,通过摩擦力将乒乓球发射出去。再配合以机头旋转机构,便可以发出具有不同旋转特性的球。
作为优化,发球的直流电机的电子元件的选型,选用大扭矩高速有刷电机并安装霍尔测速编码器,发球的直流电机驱动选用BTN7971驱动芯片,并增加隔离芯74LS244,提高信号驱动能力,同时隔离BTN芯片和单片机,保护BTN和单片机。电机工作频率范围:0~25KHz,故使用10KHz驱动频率。
作为优化,上球的直流电机的电子元件的选型,选用减速比为1:60的有刷电机并安装霍尔测速编码器,上球的直流电机的驱动选用TB6612FNG直流电机驱动芯片,具有大电流MOSFET-H桥结构,相比L298N的热耗性和外围二极管续流电路,它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸,同样采用10KHz驱动频率。
进一步地,步进电机6选用42步进电机,采用双相四线控制方式,使用8个MOS管组成双H桥进行驱动,同时使用工业级高精度16384线磁编码,进行速度检测。同时安装三个U槽型光电开关PM-L25,重复精度为0.05mm,数字量输出方便读取,用来进行位置检测,在发球机上电的时候,借助光电开关进行初始位置的矫正。
上旋转平台底座1:链接发射头23和弯管(俯仰)4的底座,1是旋转机构的底座吗;
尺寸为80×1.5的大齿轮2,由步进电机6带动小齿轮11转动从而而带动大齿轮2进行水平方向或发球旋转方向(因为大齿轮在水平方向和发射位置都有,所以一个是控制水平方向的,一个是控制发球旋向的)的角度调节
发球的选装方向就是发射出去的乒乓球自转的方向,步进电机6驱动大齿轮2和小齿轮11旋转,步进电机和小齿轮都是同轴的,大齿轮都是固定,步进电机带动小齿轮绕着大齿轮旋转;
上旋转平台3:连接发射头23和俯仰弯管4的平台,3是旋转机构的底座,1与3固定相连;
俯仰弯管4:负责将铅直方向的供球调节为水平方向;
俯仰限位触发块5:负责在俯仰角度一定时触发俯仰光电开关29,俯仰限位触发块5与28都是触发限位的挡块,只是因为所处位置不同,零件形状不同,5是触发俯仰限位的,28是触发水平限位和发射角度限位的;
步进电机6:乒乓球发球机的水平、俯仰、发球角度调节的高精度步进电机步进电机42指长、宽均为42mm的通过脉冲控制的步进电机,负责水平、俯仰、发球角度旋转的电机都是42步进电机,发球电机是高速霍尔电机,上球电机是带有减速齿轮箱的高速霍尔电机;
二阶抬升座7.将蜗轮24蜗杆25传动抬升离主平台8一定的距离,为步进电机腾出放置空间,因为蜗轮蜗杆传动需要一定的空间(蜗轮尺寸比较大不能直接贴在平台上旋转)所以吧蜗轮蜗杆抬升一定的高度同时可以放下与蜗杆同轴的步进电机,同时也是为了提升发球的高度、便于安装各种测量传感设备;
主平台8:水平方向旋转运动的主要工作平台,放置2台步进电机、光电开关22、29等主要部件的平台,平衡弹簧的作用是:平衡弹簧是连接在弯管4和8主平太上的,因为发射头重量集中在前面部分,所以整体重心靠前,由于重力影响,给蜗轮蜗杆传动造成了很大的阻力,通过平衡弹簧平衡头部重力,将重心放在转轴处可以使机器在静止状态下蜗轮不施加给蜗杆力,减小蜗轮蜗杆的摩擦力,增大传动效率、减小电机所需输出的扭矩;
型号为SKF51109的推力球轴承9:尺寸为内径45外径65厚度14的轴承,主要承载轴向力
亚克力增高板10:调节推力球轴承9与各工作平台间的距离
尺寸为15×1.5的小齿轮11,由步进电机6带动小齿轮11转动从而而带动大齿轮2进行水平方向或发球旋转方向的角度调节
主平台底座12:主平台8与大齿轮2的扣合件,同时为安装光电传感器22的平台,水平旋转机构03和发球旋向旋转机构05均包含相同的零件,只是安装位置不同,在工程制图中同一零件只标注一次
抬升座13:将主平台8抬离储球平台19的送球管道;
转接管14:将主平台8底部的球通过转接管14送至抬升座13管道内,转接管14的作用是球从主平台底部运送到主平台顶部的管道;
直流调速电机15:发射乒乓球的直流调速电动机,可调节发球的速度,也可通过两电机转速差实现旋转球;
推球块连接件16:连接推球块17和发球电机21的连接件,发球电机21和上球电机不是同一个,发球电机是高速霍尔电机,上球电机是带有减速齿轮箱的高速霍尔电机并且电机的大小、转速尺寸输出扭矩均不相同,推球块连接件16属于易损消耗件,去掉16虽然会带来安装的便捷,但如果瞬时扭矩过大造成电机与推球块脱扣后需要重新更换整体的推球块的话成本会很高,但如果但做一个连接件如果发生脱扣只需更换连接件即可,此处维护成本可降低百分之90以上;
推球块17:将储球平台19内的底部球推入转接管14内
底座18:储球平台19底部的底座,将控制板、上球电机21、电源等零件装入内部,美化外观
储球平台19:储存乒乓球的平台,一次可储存150-200枚乒乓球
摩擦轮20:由直流调速电机15带动旋转,通过摩擦力将乒乓球发射出去
上球电机21:将乒乓球从储球平台19推入摩擦轮20处的动力源,上球的直流电机的型号为MD36N
光电传感器22:光电开关PM-U25型,负责识别乒乓球发球机的水平、旋转球方向的初始位置
发射头23:发射乒乓球的发射头,装载直流调速电机15和摩擦轮20,发球的直流电机型号为MG545
蜗轮24:60×0.5蜗轮24与蜗杆25配合传动实现俯仰角度的调节,就是正常的蜗轮蜗杆传动配合
步进电机转接架26:俯仰角度调节的步进电机6与俯仰步进电机支架座27的连接支架
俯仰步进电机支架座27:俯仰角度调节的步进电机高度调节支架光电开关挡片28:负责遮挡光电开关激光部分触发光电开关
俯仰光电开关29:光电开关PM-R25型,负责识别乒乓球发球机俯仰方向的初始位置
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。