一种具有核工业后处理环境下辐射监测和去污机器人
文献发布时间:2023-06-19 19:23:34
技术领域
本发明属于核工业后处理技术领域,涉及一种具有核工业后处理环境下辐射监测和去污机器人,尤其涉及一种提供自主监测,超标报警,主动寻找目标,定期清洗去污,同时兼备可远程遥控操作,智能化的核工业后处理领域内的机器人。
背景技术
核工业中乏燃料剪切处理的过程中不可避免产生大量的飞扬粉尘,其中含有很高放射性粉尘的气溶胶,气溶胶泄漏将对工艺操作人员身体造成极大危害,对环境场和设备造成严重污染,需要极高性的工艺辐射防护的要求,传统的辐射监测设备和工艺清洁保养设备无法满足核工业后处理作业场的高辐射作业。后处理大部分环境场和设备都存在一定量的放射性,促使操作人员的工作环境比较恶劣,辐射自主监测和清洗去污机器人是应用在高辐射环境下,满足在狭小且复杂空间长期从事辐射监测和去污的特种机器。
发明内容
本发明的目的就是提供一种具有核工业后处理环境下辐射监测和去污机器人,能够安全、高效、可靠的对核工业后处理领域环境场所和设备进行监测去污。
本发明的目的可以通过以下技术方案来实现:
一种辐射监测和去污机器人,包括
基座,底部设有移动组件,顶部设有支撑组件;
监测组件,包括设于支撑组件上的监控摄像仪与检测安装座,以及设于检测安装座上的气溶胶检测仪;
升降机械抓手,设于基座上;以及
去污组件,包括设于基座底部的去污剂集装箱、设于基座前端的毛刷、指向毛刷且与去污剂集装箱管路连接的去污剂补充喷射管,以及设于升降机械抓手移动端且与去污剂集装箱管路连接的去污剂喷枪。
进一步地,所述的移动组件包括设于基座底部两侧的导轮支撑架、多个设于导轮支撑架上的移动导轮,以及绕设于多个移动导轮外的移动履带。
进一步地,所述的基座顶面还设有挂钩。
进一步地,所述的支撑组件包括设于基座顶部的转动台,以及设于转动台上的支撑杆。
进一步地,所述的支撑杆为升降支撑杆。
进一步地,所述的监测组件还包括设于支撑组件上的照明灯。
进一步地,所述的检测仪包括气溶胶辐射监测仪、中子监测仪、γ剂量率测量、表面污染监测仪中的至少一种。
进一步地,所述的升降机械抓手包括设于基座上的转动基台、设于转动基台上的折叠臂、滑动嵌设于折叠臂远端的伸缩臂,以及设于伸缩臂远端的机械抓手;
所述的去污剂喷枪设于伸缩臂远端。
进一步地,所述的折叠臂包括端部转动连接的第一支撑臂与第二支撑臂,所述的第一支撑臂的另一端与转动基台转动连接。
进一步地,所述的第一支撑臂与第二支撑臂之间、第一支撑臂与转动基台之间均通过相应的谐波电机转动连接。
进一步地,所述的去污组件还包括设于基座底部、与去污剂集装箱管路连通的地面去污喷嘴。
与现有技术相比,本发明具有以下特点:
本发明提供了一种辐射监测和去污机器人,通过监控摄像仪与检测仪实现对核工业现场的实时视觉监控以及γ剂量率测量、核素分析、气溶胶检测,具有转动功能的支撑组件扩大监控摄像仪的监控范围,通过履带移动组件实现机器人在核工业现场的自由移动,并配合升降机械抓手、去污组件,可针对污染区域实现针对性去污清洗,为后续人员的安全进入现场做好准备,避免了因含有放射性粉尘的气溶胶泄露而对操作人员造成的危害,因而具有安全、有效、可靠、稳定的优点。
附图说明
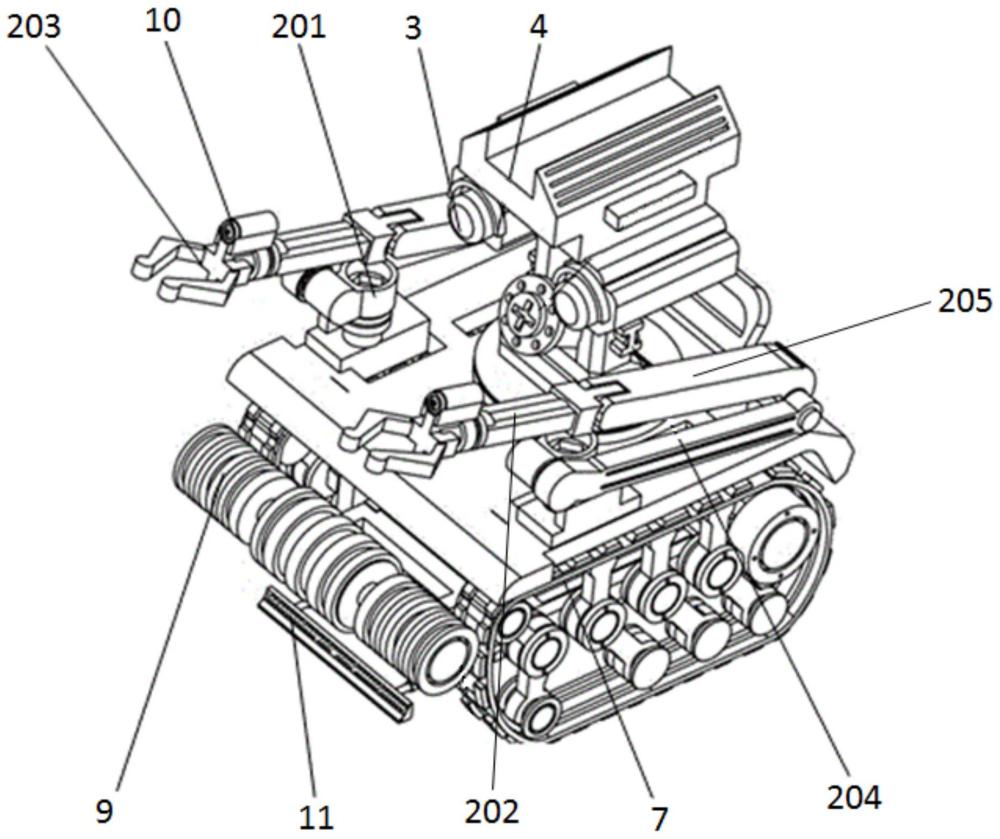
图1、图2为实施例中一种辐射监测和去污机器人的结构示意图;
图中标记说明:
1-基座、2-升降机械抓手、201-转动基台、202-伸缩臂、203-机械抓手、204-第一支撑臂、205-第二支撑臂、3-监控摄像仪、4-检测安装座、5-转动台、6-支撑杆、7-移动履带、8-去污剂集装箱、9-毛刷、10-去污剂喷枪、11-地面去污喷嘴、12-导轮支撑架、13-移动导轮。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例:
如图1、图2所示的一种辐射监测和去污机器人,包括基座1、设于基座1底部的移动组件、设于基座1顶部的支撑组件、设于支撑组件上的监测组件、设于基座1上的升降机械抓手2,以及去污组件。
其中,监测组件包括设于支撑组件上的监控摄像仪3与检测安装座4,以及设于检测安装座4上的检测仪。其中,检测仪包括气溶胶辐射监测仪、中子监测仪、γ剂量率测量、表面污染监测仪中的至少一种。根据指定环境场监测,监测项可包括:γ剂量率测量、核素分析、气溶胶等。
在一些具体的实施例中,监测组件选用相应的耐高辐射监控设备,外部均加装防辐射外壳,壳体可填充抗辐射材料,监控系统的摄像头部设定遮挡刷,休止状态遮挡刷落下减少辐射,工作状态遮挡刷升起。
在一些具体的实施例中,该机器人还包括报警仪。
在一些具体的实施例中,监控摄像仪3为耐辐射摄像仪,并与远端显示屏信号连接。
在一些具体的实施例中,监测系统采用耐高辐射设备,选用一备一用,所述监测系统和支撑杆采用镶嵌式连接,设备集成数字化探测,支撑杆高低度满足人为设定,内部连接方式为丝杆传动。
支撑组件包括设于基座1顶部的转动台5,以及设于转动台5上的支撑杆6。在一些优选的实施例中,该支撑杆6可选为升降支撑杆,从而可以配合监测组件在不同高度位置进行检测。
支撑杆底部通过齿轮传动实现旋转功能,监测角度满足360°调节,监控的成像在外围显示屏中呈现,对作业环境场无死角实时观测,监测组件还具备照明功能,即包括设于支撑组件上的照明灯,以协助操作员进行去污工作。
去污组件包括设于基座1底部的去污剂集装箱8、设于基座1前端的毛刷9、指向毛刷9且与去污剂集装箱8管路连接的去污剂补充喷射管,以及设于升降机械抓手2移动端且与去污剂集装箱8管路连接的去污剂喷枪10。此外,去污组件还包括设于基座1底部、与去污剂集装箱8管路连通的地面去污喷嘴11。
在一些具体的实施例中,支撑杆6内也可嵌设去污剂喷枪。
在一些具体的实施例中,去污剂喷枪10为去污剂高压枪。
在一些具体的实施例中,去污组件分两种去污方式,第一种:自主去污,前期设定巡查部位,对指定区域定期去污,其中去污剂集装箱8开口为插孔,喷嘴可选用斜口插针,去污剂集装箱8采用轨道送入去污剂喷嘴,具体的连接类似于输液器,指定喷嘴喷射,去污毛刷传动部位具备升降,毛刷套的可高速旋转,毛刷具备更换,对污染区域表面进行强力擦拭。第二种:遥控操作去污,针对高污染大片区环境连接高压枪清新冲洗,高压枪喷头的射程满足调节,机体的高压枪接头为母头,外部管道接头为公头,喷嘴安装于两个支撑杆内侧,针对辐射高点操作机械臂夹持特种工装进行消除。
升降机械抓手2包括设于基座1上的转动基台201、设于转动基台201上的折叠臂、滑动嵌设于折叠臂远端的伸缩臂202,以及设于伸缩臂202远端的机械抓手203;去污剂喷枪10设于伸缩臂远端。
具体的,折叠臂包括端部转动连接的第一支撑臂204与第二支撑臂205,所述的第一支撑臂204的另一端与转动基台201转动连接。在第二支撑臂205远端设有嵌槽,嵌槽内置伸缩气缸,通过伸缩气缸推动伸缩臂202伸出。
第一支撑臂204与第二支撑臂205之间、第一支撑臂204与转动基台201之间均通过相应的谐波电机转动连接。通过谐波电机以准确控制转动角度,从而精确控制机械抓手203的位置。
在一些具体的实施例中,机械臂手腕部位除了可安装去污剂喷枪10外,还可安装γ剂量率监测仪和α/β表面污染监测仪,γ剂量率监测仪机械臂的伸缩可替代长杆剂量监测仪,机械抓手203夹钳可承受50kg的重力,满足轻度工器具的夹紧力。
移动组件包括设于基座1底部两侧的导轮支撑架12、多个设于导轮支撑架12上的移动导轮13,以及绕设于多个移动导轮13外的移动履带7。行进系统为履带系统,适合复杂崎岖区域作业,对于地面的管道及线路不会造成二次污染以及损失。
在一些具体的实施例中,本机器人还包括控制系统,包括嵌入式开发板、上位机与下位机的通讯转换器、单片机、控制器、驱动板、测距仪、避障器;供电系统:采用为充电桩供电,供电系统指在固定机组位供电,低电量发出预警信号,自动回归充电桩位置充电,另外满足手动充电;避障器选用红外避障器或超声波避障器。
在一些具体的实施例中,本机器人还包括以钨镀层作为保护层,覆于上述器件外。
在一些具体的实施例中,基座1顶面还设有挂钩,以便于将机器人搬运、吊装投入监测和去污作业场所,同时也可通过监控摄像仪3与移动组件的配合,将其遥控到作业指定区域。
工作原理:进入作业环境场,监测和去污机器人对周围的环境进行捕捉,对潜在障碍物进行参照设定,确定巡查区域,人员配合设定监测实施范围;同时监测组件进行初始状态采集,支撑组件启动旋转,监测组件对环境场气溶胶进行采集,并反馈至工作人员处的显示屏上;采集完成系统主板将升降支撑杆,对高度空间的剂量率进行普查,同时,支撑进行旋转,确保各个空间均匀监测;
当监测到辐射高点及气溶胶超标时,支撑组件往返旋转,监测系统进行二次复查监测,数据反馈并发出预警;之后启动去污系统,根据剂量率和核素分析,去污剂补充喷射管对毛刷11进行去污剂喷洒,毛刷启动高速旋转,对地面和墙面进行去污;
对大片区气溶胶及高污染区域,连接去污剂喷枪10,开启监控摄像仪3观测,对辐射热点消除,对复杂区域和高辐射点,控制升降机械抓手2中的谐波电机,机械臂夹持工器具伸展到超标点进行热点高点消除;并由长杆监测器实施反馈出剂量率。
上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。