一种多类别目标识别方法及系统
文献发布时间:2023-06-19 19:33:46
技术领域
本发明主要涉及到安防或监控技术领域,特指一种多类别目标识别方法及系统,尤其适用于无人值守等安防技术领域的处理长短周期震动信号的多类别目标识别方法及系统。
背景技术
在众多对无人值守有需求的行业和领域中,根据实际的应用需求,需要实施无人监控,例如对行人、车辆、挖掘、爆破等震动信号进行识别。在传统的无人值守传感器系统中,为了能对传感器周边环境进行感知,会采用传统的机器学习方法或者深度神经网络来识别环境信号。但不论采用何种分类器,当待识别信号中既有长周期信号又有短周期信号时,单一的分类器很难在实时性和准确率上兼顾。
在具体应用时,一般来说,针对行人、车辆信号属于短周期信号,只需要几秒即可获得多个信号;相对的挖掘信号的时间间隔周期则长很多,从1s到5s不等。单一分类器在同时处理这两类时间周期差异很大的信号时效果不理想。使用较短的信号段提取特征来识别,系统实时性好,但长周期信号的准确率则较差;使用较长的信号段提取特征来识别,对于长周期信号准确率较好,但系统延时又会很大。
发明内容
本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种原理简单、适用范围广、识别精度高、能够大大降低硬件开销的多类别目标识别方法及系统。
为解决上述技术问题,本发明采用以下技术方案:
一种多类别目标识别方法,其包括:
步骤S1:预处理:对获取的原始数据进行预处理;
步骤S2:分帧:对原始数据进行分帧,分为长时间周期帧和短时间周期帧;
步骤S3:目标识别:分别对步骤S2中的两种帧进行特征提取,输入到对应的神经网络进行目标识别;
步骤S4:融合:根据信号特点,对两个神经网络结果进行融合,把融合结果作为传感器识别结果输出。
作为本发明方法的进一步改进:在步骤S1中,对获取的原始数据进行滤波的流程包括:
步骤S101:根据目标信号通常为低频信号,噪声为高频信号,首先对信号进行低通滤波,保留目标信号,滤除高频噪声;
步骤S102:对信号进行陷波滤波或梳状滤波,滤除工频及其谐波干扰。
作为本发明方法的进一步改进:所述步骤S1中还包括步骤S103:当存在低频干扰时,使用带通滤波器进行带通滤波,降低干扰的影响。
作为本发明方法的进一步改进:所述步骤S2中分帧的流程包括:
步骤S201:对经过滤波处理的数据进行分帧;
步骤S202:根据短周期信号特点和实时性要求,短周期帧采用2-5s或小于2s的信号段作为一帧;
步骤S203:根据长周期信号特点和准确率方面要求,长周期帧采用10-20s或者大于20s的信号段作为一帧。
作为本发明方法的进一步改进:所述步骤S3中提取信号特征并进行识别的流程包括:
步骤S301:对于短周期帧,使用细节以及多个维度提取特征;分类器的输出也是短周期信号对应类别;
步骤S302:对于长周期帧,只提取主要特征;分类器输出也是长周期信号对应类别。
作为本发明方法的进一步改进:所述步骤S4中识别结果融合输出的流程包括:
针对短周期信号,使用短周期帧的分类结果;
针对长周期信号,使用长周期帧的分类结果;
当两者识别结果不一致时,使用长周期帧的识别结果作为输出。
本发明进一步提供一种多类别目标识别系统,其包括:
预处理单元,用于对获取的原始数据进行预处理;
分帧单元,用于对原始数据进行分帧,分为长时间周期帧和短时间周期帧;
目标识别单元,用于分别对两种帧进行特征提取,输入到对应的神经网络进行目标识别;
融合单元,用于根据信号特点,对两个神经网络结果进行融合,把融合结果作为传感器识别结果输出。
作为本发明系统的进一步改进:所述预处理单元根据目标信号通常为低频信号,噪声为高频信号,首先对信号进行低通滤波,保留目标信号,滤除高频噪声;对信号进行陷波滤波或梳状滤波,滤除工频及其谐波干扰。
作为本发明系统的进一步改进:所述目标识别单元中对于短周期帧,使用细节以及多个维度提取特征;分类器的输出也是短周期信号对应类别;对于长周期帧,只提取主要特征;分类器输出也是长周期信号对应类别。
作为本发明系统的进一步改进:所述融合单元中针对短周期信号,使用短周期帧的分类结果;针对长周期信号,使用长周期帧的分类结果;当两者识别结果不一致时,使用长周期帧的识别结果作为输出。
与现有技术相比,本发明的优点就在于:
本发明的多类别目标识别方法及系统,为一种处理长短周期震动信号的多类别目标识别方法及系统,原理简单、适用范围广、识别精度高、能够大大降低硬件开销,本发明针对长短周期震动信号的特点,分别设计了针对长周期信号的识别分类器和针对短周期信号的识别分类器,在嵌入式系统中融合使用,以此来兼顾实时性和识别性能。本发明针对长短周期信号特点,进行差异化处理。对长周期信号使用较长的时间窗口,因此可以获得较高的准确率。针对短周期信号,使用较短的观察时间窗口,可以获得更好的实时性。通过两个分类器结果的融合,使得长短周期信号的识别能够兼顾。
附图说明
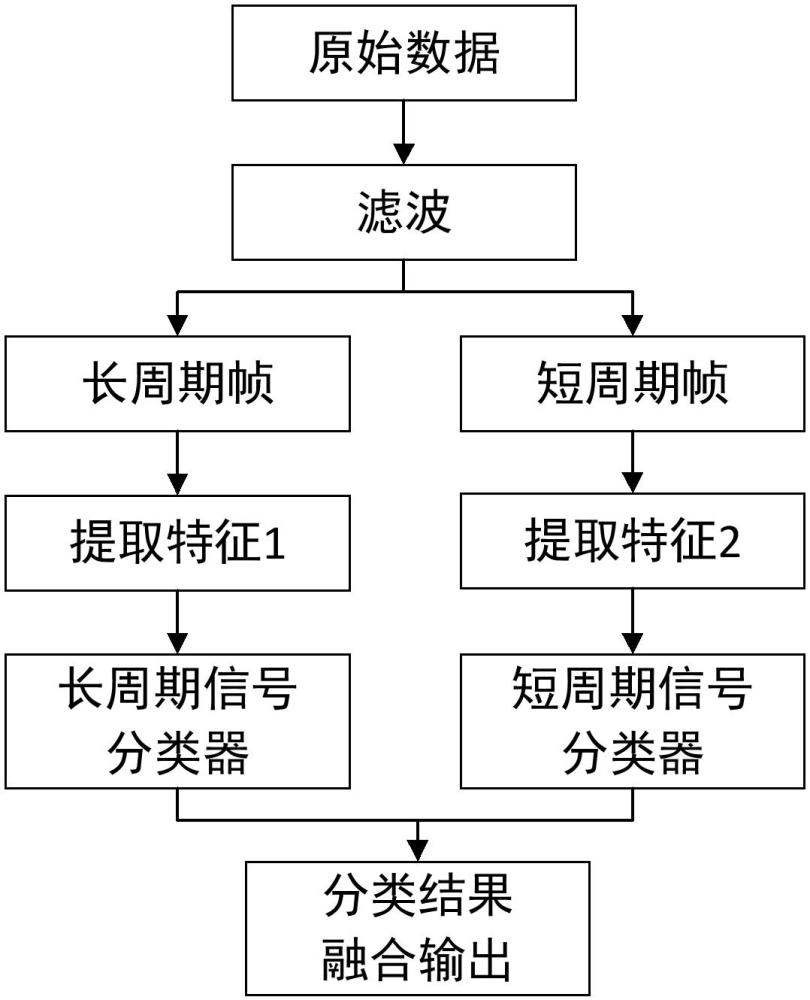
图1是本发明方法的流程示意图。
图2是本发明在具体应用实例中使用4s为一帧时的训练集分类结果示意图。
图3是本发明在具体应用实例中使用4s为一帧时的测试集分类结果示意图。
图4是本发明在具体应用实例中使用10s为一帧时的训练集分类结果示意图。
图5是本发明在具体应用实例中使用10s为一帧时的测试集分类结果示意图。
具体实施方式
以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
如图1所示,本发明的一种多类别目标识别方法,为一种处理长短周期震动信号的多类别目标识别方法,其步骤包括:
步骤S1:预处理:对获取的原始数据进行预处理;
获取原始数据的方式一般可以通过传感器或其他监控单元来实现,例如无人值守传感器设备。
步骤S2:分帧:对原始数据进行分帧,分为长时间周期帧和短时间周期帧;
在具体应用时,分帧可以根据实际应用的需求,依据微控制器处理能力来进行。
步骤S3:目标识别:分别对步骤S2中的两种帧进行特征提取,输入到对应的神经网络进行目标识别;
步骤S4:融合:根据信号特点,对两个神经网络结果进行融合,把融合结果作为传感器识别结果输出。
在具体应用实例中,在步骤S1中,对获取的原始数据进行滤波的具体流程可以包括:
步骤S101:根据目标信号通常为低频信号,噪声为高频信号,首先对信号进行低通滤波,尽可能保留目标信号,滤除高频噪声;
步骤S102:对信号进行陷波滤波或梳状滤波,滤除工频及其谐波干扰;
步骤S103:当存在低频干扰时,也可以使用带通滤波器进行带通滤波,尽可能降低干扰的影响。
在具体应用实例中,在步骤S2中分帧的具体流程可以包括:
步骤S201:对经过滤波处理的数据进行分帧;
步骤S202:根据短周期信号特点和实时性要求,短周期帧可以采用2-5s或更短的信号段(小于2s)作为一帧;
步骤S203:根据长周期信号特点和准确率方面要求,长周期帧可以采用10-20s或者更长的信号段(大于20s)作为一帧。
在具体应用实例中,在步骤S3中,提取信号特征并进行识别的具体流程可以包括:
步骤S301:对于短周期帧,由于原始信号段数据量较少,运算量相对较小,因此特征提取可以使用更丰富的细节以及多个维度提取特征,以提高算法的识别性能;分类器的输出也是短周期信号对应类别,比如行人、车辆。
步骤S302:对于长周期帧,比如挖掘,由于原始信号段数据量较大,为了满足嵌入式系统运算要求,需要忽略细节,尽可能只提取主要特征,减少运算量;分类器输出也是长周期信号对应类别,比如挖掘。
在具体应用实例中,在步骤S4中识别结果融合输出的具体流程可以包括:
针对短周期信号,优先使用短周期帧的分类结果。
优先使用长周期帧的分类结果。在测试过程中发现,长周期帧的识别结果性能要好一些,因此当两者识别结果不一致时,使用长周期帧的识别结果作为输出。
参见图2-图5,以行人和挖掘信号的识别为例,对比了选用4s和10s帧长的训练性能。可以看出对于短周期信号,从4s增加到10s,测试集F1识别性能提升约1%。对于长周期信号,测试集F1识别性能提升了约3%。因此综合考虑实时性和识别性能,短周期信号适宜使用较短的帧,长周期信号适宜使用较长的帧。本发明针对长短周期信号特点,进行差异化处理。对长周期信号使用较长的时间窗口,因此可以获得较高的准确率。针对短周期信号,使用较短的观察时间窗口,可以获得更好的实时性。通过两个分类器结果的融合,使得长短周期信号的识别能够兼顾。
本发明的上述方法已在带有FPU的普通单片机上实现,算法简单、方便、可靠、准确率高、能实时检测行人、车辆、挖掘和爆破,已经在众多行业中得到应用和验证,极具实用价值。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。