一种多翼的飞翼型太阳能无人机
文献发布时间:2024-01-17 01:17:49
技术领域
本发明属于航空飞行器技术领域,涉及一种太阳能飞机,具体涉及一种多翼的飞翼型太阳能无人机。
背景技术
太阳能无人机在环境监测、边境管控、科学研究及信息保障等方面具有独特的优势,如在电信领域,平流层太阳能飞机相对于地面中继站,其覆盖面积大,障碍物干扰少;相较卫星高度低、传输延迟小且可返回地面维修反复使用;在遥感方面,与低轨道卫星相比,可在同一区域内长期滞空反复探测且得到的图像分辨率更高;信息通讯方面,平流层太阳能无人机可以搭载空中基站或中继设备,为地面某一地区提供网络覆盖。
太阳能飞机的动力源于飞机上太阳能电池板产生的电力,由于目前太阳能电池板的光电转化效率不高,产生的电力有限,为此,太阳能飞机设计的主要任务之一就是尽可能多地在飞机上布设太阳能电池板;目前常规布局的太阳能飞机,都是在主机翼上铺设太阳能电池板(限于机身与垂翼的结构,很难在其上铺设太阳能电池板),因机身与垂翼不能用于发电,又增加了飞行阻力且占用机翼产生的升力,故从这几个角度看,太阳能飞机的机身与垂翼属于无效结构(但对飞机操控而言绝对是有效结构)。
为了克服常规布局太阳能飞机的缺陷,人们设计了无机身与尾翼的飞翼型太阳能飞机,如著名的太阳神号太阳能飞机;整架飞机就是一个飞翔的铺满太阳能电池板的翅膀,其翼展75米,弦长2.4米,(展弦比31.2),机翼面积约180平米;该款无人机超高的展弦比使其具有非常低的诱导阻力及超高的升阻比,在试飞中曾在近3万米高空稳定飞行40分钟左右,这是常规布局太阳能飞机迄今未能达到的高度,证明了飞翼型太阳能无人机完全具备高空巡航的可行性,具有在平流层长期滞空飞行的潜力。然而,为了最大限度减轻飞机重量,该款无人机的矩形平直机翼未采用高强度刚性结构设计而是采用柔性设计,允许机翼在在飞行中产生一定程度的弯曲与变形,结果,在一次试飞中遭遇强湍流,两翼端上翘幅度过大,诱导机翼产生俯仰振荡而解体。太阳神号无人机弦长仅2.4米,由于纵向(弦向)尺寸过小导致俯仰力矩且纵向阻尼力矩极小,为此采用了数十个机翼后缘的升降舵与多个差动功率电动机联合进行俯仰控制,这使得该款无人机的飞控变得非常复杂,该机的解体虽然主要是结构设计方面的问题但也与飞控设计不严密有直接的关系。
发明内容
为充分发挥超大展弦比飞翼型太阳能无人机高升阻比的优点同时克服柔性结构带来的抗弯扭能力低下以及平直单翼导致的飞行操控复杂的缺陷,同时也为了开发一种更适合在平流层高水平风速环境下巡航的无人机,本发明设计了一种多翼的飞翼型太阳能无人机,技术方案如下:
.一种多翼的飞翼型太阳能无人机,包括起落架、吊舱及飞控系统,还包括至少三个机翼,机翼均为具有展向弯度的拱形机翼,按前中后位置排布,中间机翼与前后机翼存在高度差;多个机翼通过至少两个支架连接在一起,前后机翼的翼尖通过翼间梁相连;机翼上均装有多个电动螺旋桨;机翼的上翼面均铺满太阳能电池板。
进一步的,机翼均由刚性骨架、柔性软质的上翼面、下翼面及柔性翼肋构成;所述刚性骨架由轻质材料的翼梁、刚性翼肋组成。
进一步的,机翼的上翼面与下翼面均由纤维布或薄膜制成;纤维布是聚酯纤维布或芳纶纤维布,薄膜为聚脂薄膜或超高密度聚乙烯薄膜。
进一步的,两个相邻的刚性翼肋之间的柔性翼肋数量不少于2个。
进一步的,刚性翼肋及柔性翼肋上均开有通气孔,可使由上下翼面与翼肋构成的各个气室间的空气沿翼展方向流动以平衡机翼内的压力。
进一步的,机翼的前缘均有多个进气口,后缘均封闭。
进一步的,机翼均为坦拱形,矢跨比不大于1/5;多个拱形机翼的矢跨比可以相同也可以不同,当中间机翼的矢跨比与前后机翼相同时,在机翼布局时,需将中间机翼抬升一定高度,中间机翼的翼尖不与翼间梁相连;当中间机翼的矢跨比高于前后机翼时,则无须将中间机翼抬升,而将中间机翼的翼尖与前后机翼的翼尖通过翼间梁连接在一起。
进一步的,起落架包括前机翼两侧的各一个起落架及后机翼两侧的各一个起落架。
进一步的,吊舱分两部分,一部分吊舱与起落架组合在一起用于装蓄电池;另一部分吊舱布设在中间机翼的下翼面上,用于装飞控系统、航电系统及任务载荷。
进一步的,飞控系统通过调节多个机翼上不同位置的电动螺旋桨的转速来完成飞机的横滚,偏航及俯仰动作。
本发明的优点在于:
一,多翼布局的飞翼型无人机不设尾翼及机身,大大减轻了飞机重量,大幅减少了诱导阻力,具有高升阻比,同时,由于减少了无效面积,使其具有很·高的太阳能面积利用率。
二,机翼采用刚性骨架结合柔性软质材料的上下翼面及柔性翼肋,并通过空
气冲压方式形成具有足够刚度与强度的翼型,进一步降低了机翼的重量,大幅度提高了无人机的有效载荷。
三,机翼采用拱形,显著增强了机翼的抗拉及抗压强度,尤其对升力载荷产
生的弯矩有很好的抵抗力,克服了平直机翼易于发生的翼端上翘现象,避免了折翅的风险。
四,拱形机翼具有纵向及横向静稳定性,当飞行中遇到气流扰动发生横滚或
俯仰时会产生回复力矩,自动回到稳定飞行状态,这对无人机的飞行控制是非常有利的。
五,拱形飞翼可以在水平风中做小动力盘旋运动,可大大节省电力,非常适
合在平流层高水平风速环境下的滞空飞行。
六,多机翼布局实现了前后机翼的并列,同时实现了中间机翼与前后机翼的串列,作为一种复合型的机翼布局,中间机翼产生的下洗高速气流流过后机翼的上翼面,可明显提高后机翼的升力。
七,用多个支架将前后机翼及中间机翼连在一起,形成具有空间桁架结构的机翼布局,使得机翼的刚度与强度大幅度提高,抗弯及抗扭性能显著增强,可胜任高风速及乱流环境中的稳定飞行。
八,多个拱形机翼在纵向及垂直方向的立体排布,克服了平直单翼飞翼型飞
机俯仰力矩及阻尼力矩偏小的缺陷、显著改善了飞机的俯仰稳定性。
九,通过多个机翼上的差速功率电动机可方便地对飞机的航向、滚转及俯仰
动作进行控制而无需安装方向舵,因而极大降低了飞行控制的难度,简化了机翼的制造工艺。
十,机翼上均安装多个电动螺旋桨,除提供飞行所需的推力外,螺旋桨的排
气从机翼前缘的进气口强行吹入机翼内的气室,使机翼内始终保持一定的正压力从而保持机翼的刚度,这对于侧飞及高风速下的顺风飞行非常重要。
十一,机翼采用刚性骨架与软质柔性材料,结构简单,制造容易,成本低,可
显著降低太阳能无人机的整机造价。
附图说明
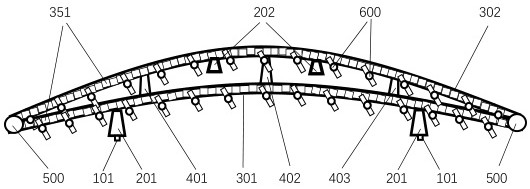
图1是本发明实施例的正视图
图2是本发明实施例的俯视图
图3是本发明实施例的侧视图
图4是图2中A-A面的剖视图
图中,100-起落架;200-吊舱;300-机翼;400-支架;500-翼间梁;600-电动螺旋桨;101-前机翼起落架;102-后机翼起落架;201-蓄电池吊舱;202-飞控设备及任务载荷吊舱;301-前机翼;302-中间机翼;303-后机翼;31-刚性骨架;311-翼梁;312-刚性翼肋;32-机翼上翼面;33-机翼下翼面;34-柔性翼肋;341-翼肋通气孔35-气室;351-进气口;401-左支架;402-中间支架;403-右支架。
实施方式
下面结合附图,对本发明实施例中的技术方案进行详细描述,显然,所描述的实施例仅是本发明优选的实施方式之一,是为了使本领域的技术人员更好地理解本发明,不可理解为对本发明权利保护范围的限定,相反,对于本领域的普通科研人员而言,凡利用本发明进行的任何非实质性的改动或调整,均应落入本发明权利要求书的保护范围之内。
实施例
一种多翼的飞翼型太阳能无人机,如图1-4所示,包括起落架100、吊舱200及三个机翼300,三个机翼均为具有展向弯度的坦拱形机翼,按前中后位置排布,其中前机翼301与后机翼303的矢跨比均为1/25,中间机翼302的矢跨比为1/15;由于中间机翼302的矢跨比大于前机翼301及后机翼303,所以中间机翼302的高度总体上大于前机翼301与后机翼303;三个机翼通过至少三个支架400连接在一起,其中在三个机翼的最高处(拱顶)安装中间支架402,在机翼的1/4处安装左支架401,在机翼3/4处安装右支架403,支架400采用碳纤维复合材料制成的、有斜的加强杆的梯形支架;支架400的底部与前机翼301及后机翼303的上翼面32相连,支架400的顶部与中间机翼302的下翼面33相连,;前机翼301、中间机翼302及后机翼303的翼尖通过翼间梁500相连,翼间梁500由碳纤维管材制成,具有足够的抗弯扭强度;三个机翼300上均装有多个电动螺旋桨600;机翼的上翼面均铺设太阳能电池板。
具体地,根据本发明实施例的多翼布局的飞翼型太阳能无人机还包括以下特征:
机翼300均由刚性骨架31、柔性的上翼面32、下翼面33及柔性翼肋34构成;其中刚性骨架31由碳纤维材料制成的翼梁311及刚性翼肋312组成;柔性上翼面32、下翼面33及柔性翼肋34均由芳纶纤维布制成。
前机翼301、后机翼303与中间机翼302的投影形状可以一样,也可以不一样;本实施例中前机翼301与后机翼303的投影形状均为矩形+半椭圆形,且对称排布,中间机翼302的投影形状为矩形。
机翼300的两个相邻的刚性翼肋312之间的柔性翼肋34的数量一般为2-8个,本实施例中,前机翼301与后机翼303两个相邻的刚性翼肋312之间的柔性翼肋34数量均选为4,中间机翼302的两个相邻的刚性翼肋312之间的柔性翼肋34数量选为6,两个相邻的柔性翼肋34之间的距离及相邻的刚性翼肋312与柔性翼肋34间的距离相同,均不大于50公分,本实施例中选择25公分;机翼300上的柔性翼肋34的数量直接影响机翼300的重量,同时也影响机翼表面的整体挺阔度;刚性骨架31长度不变的情况下,柔性翼肋34数量越多,意味着刚性翼肋312数量越少,机翼300的自重越轻,但机翼300的刚度与强度降低,翼面挺阔度降低。在保证机翼强度的前提下,可以通过调节柔性翼肋34与刚性翼肋312的数量来调节机翼300的重量以参与飞机重心的调节。
刚性翼肋312及柔性翼肋34上均开有通气孔341,可使由上下翼面与翼肋构成的各个气室35间的空气沿翼展方向流动以平衡机翼内的压力。
机翼300的前缘均有多个进气口351,后缘均封闭,当机翼300与空气有相对运动时,空气由进气口351进入气室35,因后缘封闭而不能排出,在空气冲压作用下,气室35内产生一定的压力使柔性翼面鼓胀挺起,与刚性骨架31一起,使机翼300保持足够的刚性和强度。
起落架100包括前机翼301上的两个前起落架101及后机翼303上的两个后起落架102,由于机翼300为拱形,起落架100若装在拱顶处,当翼展较大时,则会使起落架100过高,重量也偏重,阻力过大,故起落架100的位置在机翼300的近翼端的两侧。
吊舱200包括两部分,其中一部分吊舱201与起落架100组合在一起,这部分吊舱用于装蓄电池,另一部分吊舱202布设在中间机翼302的中心附近,用于装飞控系统、航电系统及任务载荷。
飞控系统通过调节三个机翼300上不同位置的电动螺旋桨600的转速来完成横滚,偏航及俯仰动作;具体方法是,需要转向时,降低前机翼301与后机翼303一侧近翼端的电动螺旋桨600的转速同时增加另一侧近翼端的电动螺旋桨600的转速;需要抬头爬升时,降低中间机翼302中心附近电动螺旋桨600的转速同时增加前后机翼中心附近电动螺旋桨600的转速;需要低头俯冲时,降低前机翼301与后机翼303中心附近的电动螺旋桨600的转速同时增加中间机翼302中心附近的电动螺旋桨600转速即可。