隧道检测系统和方法
文献发布时间:2024-01-17 01:20:32
技术领域
本发明涉及隧道检测技术领域,特别涉及一种隧道检测系统和方法。
背景技术
城市地下管网中,主干排水隧道相比其他普通管道有一定特殊性。此类隧道结构形式特殊,水文情况复杂,一般存在以下特点:一是隧道长度普遍较长,长度普遍在1km以上,甚至可达20km以上;二是埋深普遍较深,隧道埋深一般都在10m至30m;三是隧道未修建检修井,只有用作通风的无水通气斜井;四是水量大,流速快,流速长期1m/s以上;五是隧道有许多不可预知因素,例如气体浓度是否超标,管内水里是否有石块、渣网等阻碍物等。
由于上述原因,目前没有合适的检测系统可对该类工况条件下的长隧道主干管路进行检测,从而无法对其缺陷及时发现与补救。
发明内容
本发明的主要目的是提供一种隧道检测系统,旨在对长距离大水流隧道环境进行检测,以判断其是否存在淤积、变形、破裂等缺陷。
为实现上述目的,本发明提出的隧道检测系统,定义所述隧道内具有水流方向,上游通风井与所述隧道的连接处为投放接口,上游通风井显露于地面的井口为地面管口,下游通风井与所述隧道的连接处为回收接口,所述隧道检测系统包括线缆车、投放控制器、检测机器人和回收装置,所述线缆车用于设置于所述地面管口;所述投放控制器用于设置于所述投放接口,并与所述线缆车有线连接;所述检测机器人用于投放于靠近所述投放接口的水面,所述检测机器人包括有主控组件、信息采集组件和推进组件,所述主控组件具有连接于所述线缆车线缆的有线控制模式和无线控制模式,所述主控组件与所述信息采集组件和所述推进组件电连接,以控制所述信息采集组件进行所述隧道内的信息采集,以及控制所述推进组件进行沿所述隧道水流方向的运动;所述回收装置设置于所述回收接口,包括回收控制器和回收部,所述回收控制器与所述检测机器人无线连接,以对所述检测机器人进行无线控制;所述回收控制器与所述回收部有线连接,以控制所述回收部的投放和收回,实现对所述检测机器人的回收。
在本申请的一实施例中,所述隧道检测系统还包括计米装置,所述计米装置用于设置于所述投放接口,所述计米装置与所述投放控制器电连接,并与所述检测机器人的线缆连接,所述计米装置通过记录所述线缆的放线长度得到所述检测机器人的行进里程,并发送至所述投放控制器。
在本申请的一实施例中,所述隧道检测系统还包括漂浮筏,所述漂浮筏用于设置于所述回收接口,以在所述检测机器人回收后辅助回收所述检测机器人的线缆至所述线缆车。
本发明还提出一种隧道检测方法,所述隧道检测方法使用如上所述的隧道检测系统,包括以下步骤:
控制所述投放控制器发出启动信号;
控制所述线缆车运行,并控制所述检测机器人由所述投放接口向所述回收接口行进,并采集所述隧道内的信息;
切换所述检测机器人的控制模式,并使所述回收控制器无线控制所述检测机器人,使其行进至所述回收接口进行回收。
在本申请的一实施例中,所述切换所述检测机器人的控制模式,并使所述回收控制器无线控制所述检测机器人,使其行进至所述回收接口进行回收的步骤,具体包括:
检测所述检测机器人的行进里程;
判断所述行进里程是否达到预设里程;
若是,则将所述检测机器人的控制模式由有线控制切换至无线控制。
在本申请的一实施例中,所述隧道检测系统还包括计米装置,所述检测所述检测机器人的行进里程的步骤,具体包括:
控制所述计米装置与所述检测机器人的线缆连接,并记录所述线缆的通过长度,以得到所述检测机器人的行进里程。
在本申请的一实施例中,所述判断所述检测机器人的行进里程是否达到预设里程的步骤,具体包括:
控制所述投放控制器接收所述计米装置检测的行进里程,并将所述行进里程与预设里程进行求差值;
若所述差值小于预设差值,则达到所述预设里程。
在本申请的一实施例中,所述若是,则将所述检测机器人的控制模式由有线控制切换至无线控制的步骤,具体包括:
控制所述检测机器人的主控组件接收所述投放控制器的切换控制模式信号;
控制所述检测机器人由有线控制模式切换为无线控制模式。
在本申请的一实施例中,所述切换所述检测机器人的控制模式,并使所述回收控制器无线控制所述检测机器人,使其行进至所述回收接口进行回收的步骤,具体包括:
控制所述检测机器人与所述线缆断开连接;
控制所述回收控制器投放所述回收部并拦截所述检测机器人;
控制收回所述回收部。
在本申请的一实施例中,所述隧道检测系统还包括漂浮筏,所述切换所述检测机器人的控制模式,并使所述回收控制器无线控制所述检测机器人,使其行进至所述回收接口进行回收的步骤之后,还包括:
控制所述漂浮筏连接所述线缆;
控制所述线缆车运行并回收所述线缆。
本发明技术方案提出的隧道检测系统,包括线缆车、投放控制器、检测机器人和回收装置,投放控制器用于发出控制信号,通过线缆车传输至检测机器人,检测机器人搭载有主控组件、信息采集组件和推进组件,主控组件接收到来自投放控制器的控制信号,并控制信息采集组件和推进组件开始工作,检测机器人由投放接口行进至回收接口,同时采集隧道内的信息,待检测机器人到达回收接口,回收控制器控制回收部,回收检测机器人,完成检测。本隧道检测系统能够完成对长距离、埋深深、无检修井、水量大、未知因素多的隧道环境进行检测,以判断其是否存在淤积、变形、破裂等缺陷。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
图1为本发明隧道检测系统一实施例的结构示意图;
图2为本发明隧道检测方法一实施例的流程示意图;
图3为本发明隧道检测方法又一实施例的流程示意图;
图4为本发明隧道检测方法再一实施例的流程示意图;
图5为本发明隧道检测方法另一实施例的流程示意图;
图6为本发明隧道检测方法又又一实施例的流程示意图;
图7为本发明隧道检测方法再再一实施例的流程示意图。
附图标号说明:
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
由于主干排水隧道相比其他普通管道有一定特殊性。此类隧道结构形式特殊,水文情况复杂,目前没有合适的检测系统可对该类工况条件下的长隧道主干管路进行检测,从而无法对其缺陷及时发现与补救。因此,本发明提供一种隧道检测系统,旨在对长距离大水流隧道环境进行检测,以判断其是否存在淤积、变形、破裂等缺陷。
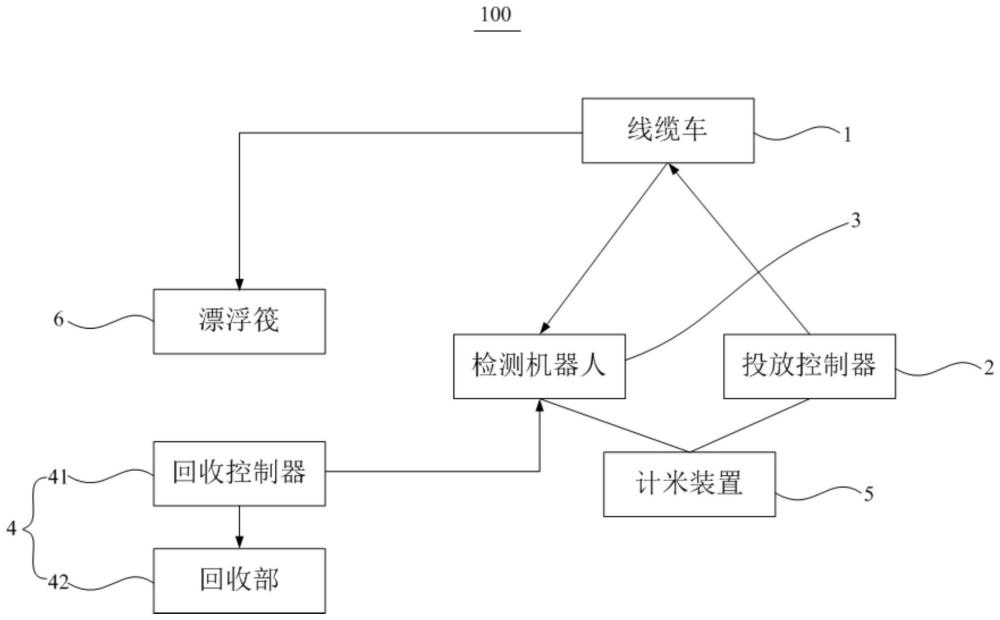
本发明提出一种隧道检测系统100,结合参照图1,定义隧道内具有水流方向,上游通风井与隧道的连接处为投放接口,上游通风井显露于地面的井口为地面管口,下游通风井与隧道的连接处为回收接口,隧道检测系统100包括线缆车1、投放控制器2、检测机器人3和回收装置4,线缆车1用于设置于地面管口;投放控制器2用于设置于投放接口,并与线缆车1有线连接;检测机器人3用于投放于靠近投放接口的水面,检测机器人3包括有主控组件(未图示)、信息采集组件(未图示)和推进组件(未图示),主控组件具有连接于线缆车1线缆的有线控制模式和无线控制模式,主控组件与信息采集组件和推进组件电连接,以控制信息采集组件进行隧道内的信息采集,以及控制推进组件进行沿隧道水流方向的运动;回收装置4设置于回收接口,包括回收控制器41和回收部42,回收控制器41与检测机器人3无线连接,以对检测机器人3进行无线控制;回收控制器41与回收部42有线连接,以控制回收部42的投放和收回,实现对检测机器人3的回收。
本实施例中,线缆车1设置在地面管口,并与检测机器人3通过线缆有线连接,线缆车1采用市面上常见的型号和规格,具体型号和规格应根据隧道的长度、通风井的长度和待检测隧道的长度的总和来选择,本申请在此不做进一步限定。投放控制器2用于发出和接收信号,并与线缆车1有线连接,投放控制器2的控制信号通过线缆车1传输至检测机器人3,有线传输效率更高,受环境影响较小,连接稳定。检测机器人3的主控组件接收到控制信号,控制信息采集组件和推进组件开始工作,检测机器人3由投放接口行进至回收接口,并同时采集隧道内的信息,以判断隧道是否存在淤积、变形、破裂等缺陷。检测机器人3上搭载的信息采集组件可以是云台组件、摄像组件或气体传感器组件等,本申请在此不做进一步限定。推进组件可以是螺旋桨,也可以是螺杆结构等,本申请在此不做进一步限定。待检测机器人3行进至回收接口,回收控制器41控制回收部42投放和收回,以回收检测机器人3,回收部42可以是打捞网,也可以是夹爪等结构,本申请对此不做进一步限定。
本发明技术方案提出的隧道检测系统100,包括线缆车1、投放控制器2、检测机器人3和回收装置4,投放控制器2用于发出控制信号,通过线缆车1传输至检测机器人3,检测机器人3搭载有主控组件、信息采集组件和推进组件,主控组件接收到来自投放控制器2的控制信号,并控制信息采集组件和推进组件开始工作,检测机器人3由投放接口行进至回收接口,同时采集隧道内的信息,待检测机器人3到达回收接口,回收控制器41控制回收部42,回收检测机器人3,完成检测。本隧道检测系统100能够完成对长距离、埋深深、无检修井、水量大、未知因素多的隧道环境进行检测,以判断其是否存在淤积、变形、破裂等缺陷。
请参见图1,在本申请的一实施例中,隧道检测系统100还包括计米装置5,计米装置5用于设置于投放接口,计米装置5与投放控制器2电连接,并与检测机器人3的线缆连接,计米装置5通过记录线缆的放线长度得到检测机器人3的行进里程,并发送至投放控制器2。
本实施例中,隧道检测系统100还包括计米装置5,计米装置5设置于投放接口,与投放控制器2有线连接,并且通过滑轮机构和计米轮与靠近检测机器人3的线缆连接,线缆伸长带动计米轮转动,进而带动编码器转动,计量线缆的放线长度,从而获得检测机器人3的行进里程,实现监测检测机器人3行进的效果。
请再次参见图1,在本申请的一实施例中,隧道检测系统100还包括漂浮筏6,漂浮筏6用于设置于回收接口,以在检测机器人3回收后辅助回收检测机器人3的线缆至线缆车1。
本实施例中,由于待检测的隧道环境复杂,再加上线缆的密度一般比水大,线缆会沉在水底,只通过线缆车1回收线缆,线缆可能会卡在水下,造成线缆回收失败,浪费材料。设置漂浮筏6,将线缆连接在漂浮筏6上,可以使线缆浮于水面,此时再通过线缆车1回收线缆,不会发生卡住的情况,回收过程顺利流畅。
本发明还提出一种隧道检测方法,结合参照图2至图7,该隧道检测方法使用如上所述的隧道检测系统100,该隧道检测系统100的具体结构参照上述实施例,由于本隧道检测方法采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。其中,隧道检测方法包括以下步骤:
步骤S10:控制所述投放控制器2发出启动信号;
步骤S20:控制所述线缆车1运行,并控制所述检测机器人3由所述投放接口向所述回收接口行进,并采集所述隧道内的信息;
步骤S30:切换所述检测机器人3的控制模式,并使所述回收控制器41无线控制所述检测机器人3,使其行进至所述回收接口进行回收。
本实施例中,投放控制器2先发出启动信号,线缆车1接收启动信号开始运行,然后将启动信号通过线缆转发至检测机器人3的主控组件,主控组件接收到开始检测信号,并控制信息采集组件和推进组件开始工作,使检测机器人3由投放接口行进至回收接口,并采集沿途的隧道内的信息,以判断隧道是否存在淤积、变形、破裂等缺陷。等到检测机器人3行进到接近回收接口时,切换检测机器人3的控制模式,由有线控制模式切换为无线控制模式,然后回收控制器41无线控制检测机器人3,使之行进至回收接口,方便后续回收部42对检测机器人3进行回收,完成整个检测过程,无需人工回收,节省人力。
在本申请的一实施例中,结合参照图3,所述切换所述检测机器人3的控制模式,并使所述回收控制器41无线控制所述检测机器人3,使其行进至所述回收接口进行回收的步骤S30,具体包括:
步骤S31:检测所述检测机器人3的行进里程;
步骤S32:判断所述行进里程是否达到预设里程;
步骤S33:若是,则将所述检测机器人3的控制模式由有线控制切换至无线控制。
本实施例中,步骤S30具体包括步骤S31、步骤S32和步骤S33,首先计量并获取检测机器人3的行进里程,然后判断行进里程是否达到预设里程,需要说明的是,预设里程可以设置为大于零且小于两相邻通风井间的距离的任一数值,本申请在此不做进一步限定。如果判断检测机器人3的行进里程达到了预设里程,则控制检测机器人3切换控制模式,由线缆的有线控制切换为回收控制器41的无线控制,无线控制相对于有线控制时效性更好,响应速率更快,回收控制器41无线控制检测机器人3,以对检测机器人3进行回收,防止错过回收时机,浪费检测时间。
请参照图4,在本申请的一实施例中,所述隧道检测系统100还包括计米装置5,所述检测所述检测机器人3的行进里程的步骤S31,具体包括:
步骤S311:控制所述计米装置5与所述检测机器人3的线缆连接,并记录所述线缆的通过长度,以得到所述检测机器人3的行进里程。
本实施例中,计米装置5连接于靠近检测机器人3的线缆位置,计米装置5中的计米轮在线缆伸长的带动下转动,进而带动编码器转动,获取线缆的伸长长度,进而获取检测机器人3的行进里程。
如图5所示,在本申请的一实施例中,所述判断所述检测机器人3的行进里程是否达到预设里程的步骤S32,具体包括:
步骤S321:控制所述投放控制器2接收所述计米装置5检测的行进里程,并将所述行进里程与预设里程进行求差值;
步骤S322:若所述差值小于预设差值,则达到所述预设里程。
本实施例中,计米装置5通过电连接将行进里程传输至投放控制器2,投放控制器2计算行进里程与预设里程的差值,对比计算得出的差值与预设差值,预设差值可以根据实际需要自行设置,本申请对此不做进一步限定,若计算得出的差值小于预设差值,则判断检测机器人3此时达到预设里程,接近回收接口。
在本申请的一实施例中,结合参照图6,所述若是,则将所述检测机器人3的控制模式由有线控制切换至无线控制的步骤S33,具体包括:
步骤S331:控制所述检测机器人3的主控组件接收所述投放控制器2的切换控制模式信号;
步骤S332:控制所述检测机器人3由有线控制模式切换为无线控制模式。
本实施例中,投放控制器2发出切换控制模式信号,通过线缆车1转发至检测机器人3,检测机器人3的主控组件接收到来自投放控制器2的切换控制模式的信号,将检测机器人3的控制模式切换为无线控制模式,以便回收控制器41无线控制检测机器人3。
请再次参见图4,在本申请的一实施例中,所述切换所述检测机器人3的控制模式,并使所述回收控制器41无线控制所述检测机器人3,使其行进至所述回收接口进行回收的步骤S30,具体包括:
步骤S34:控制所述检测机器人3与所述线缆断开连接;
步骤S35:控制所述回收控制器41投放所述回收部42并拦截所述检测机器人3;
步骤S36:控制收回所述回收部42。
本实施例中,在检测机器人3行进至回收接口后,检测机器人3断开与线缆的连接,然后回收控制器41控制投放回收部42,拦截检测机器人3,回收部42可以是打捞网,也可以是夹爪或钩爪等,本申请对此不做进一步限定,最后回收控制器41控制收回回收部42,进而回收检测机器人3,完成检测。
在本申请的一实施例中,结合参照图7,所述隧道检测系统100还包括漂浮筏6,所述切换所述检测机器人3的控制模式,并使所述回收控制器41无线控制所述检测机器人3,使其行进至所述回收接口进行回收的步骤S30之后,还包括:
步骤S41:控制所述漂浮筏6连接所述线缆;
步骤S42:控制所述线缆车1运行并回收所述线缆。
本实施例中,首先控制漂浮筏6连接线缆,然后控制线缆车1回转,以实现对线缆的回收。采用漂浮筏6辅助回收线缆,防止线缆沉入水中,在回收过程中,卡在水下复杂地形,无法回收,造成经济损失和环境破坏。漂浮筏6连接线缆,使线缆能够浮于水面,辅助线缆车1回收线缆。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。