一种基于无人机群协同的居民小区燃气管网泄漏巡检系统
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及无人机巡检领域,具体是一种基于无人机群协同的居民小区燃气管网泄漏巡检系统。
背景技术
近年随着传感器技术、信号传输、信息交互、双目视觉等技术的快速发展成熟,无人机只需要搭载各种传感器和摄像头就能不受复杂地形限制准确可靠的对巡检目标进行数据采集和信息交互。无人机在各种巡检领域的应用愈加广泛,例如电网巡检,燃气管道巡检,石油石化巡检巡逻,铁路巡检巡逻和桥梁巡逻等,无人机巡检通常应用在人或车不便巡检的地理区域,所以运用无人机进行巡检能够克服地形上的困难。多无人机协同应用是指具有独立控制能力的智能个体组成的群体系统,通过信息共享、任务分配、路线规划等方式共同完成任务的新型应用方式。
目前,无人机及其相关技术趋于成熟,也广泛应用到各种行业,有关无人机的巡检现有研究大多是无人机对电力等方面的巡检,少有利用无人机群协同对燃气管网进行巡检。由于无人机续航时间的限制,其最远飞行距离十分有限,所以对较大范围的燃气管网巡检效率十分低下,同时无人机的通讯距离也有一定距离。所以急需一种无人机群协同巡检系统,搭配装载车作为无人机群的数据处理中心进行信息交互,通过路径规划和自主导航,实现无人机群自主对居民小区楼燃气管网进行快速巡检,同时实现燃气管道泄漏的准确定位。
发明内容
为解决目前燃气管网巡检效率低下、无人机在巡检过程中对于燃气管道监测的精度仍难以满足实际要求的问题,本发明的目的在于提供一种基于无人机群协同的居民小区燃气管网泄漏巡检系统,通过合理规划无人机群的巡检路径,同时精准定位燃气管道发生泄露的具体位置,提高居民小区燃气管网的巡检效率。
为实现上述目的,本发明提供如下技术方案:
一种基于无人机群协同的居民小区燃气管网泄漏巡检系统,包括:
无人机起落平台,用于实现无人机的放飞和回收;
装载车处理单元,用于规划无人机群的飞行路径,生成飞行轨迹,并输出航迹信号给无人机巡检单元,还用于处理接收到的燃气泄漏数据,实现燃气泄漏位置的精准定位;
无人机群巡检单元,用于通过飞行路径实现精准导航、障碍物实时躲避、避障后对航迹修正,以及对燃气管道泄漏的监测;
其中,所述装载车处理单元包括:
装载车,用于携带所述无人机起落平台,根据无人机群飞行路径放置在无人机起降的位置,实现无人机的自主起飞、降落;
飞行路径规划模块,用于生成无人机群飞行路径;
信息交互模块,用于精确定位燃气泄漏位置;
其中,所述无人机群巡检单元包括:
精准导航模块,用于根据飞行路径沿管道精准导航;
机群协同避障模块,用于实现障碍物实时躲避;
航迹修正模块,用于对无人机航迹进行修正;
激光监测模块,用于对管道进行泄漏巡检;
所述无人机群巡检单元还包括数据传输模块、信号接收模块、飞行控制模块;
其中,所述信息交互模块包括数据接收模块、数据处理模块、信号传输模块。
作为本发明进一步的技术方案,所述飞行路径规划模块与信号传输模块相连,通过输出信号给精准导航模块发出命令,使得无人机群准确无误地沿飞行路径对燃气管网进行巡检,所述飞行路径规划模块包括:
基线解算子模块,通过待巡检区域的地理信息位置建立三维网络模型,划分出重点巡检网格,规划无人机群最短时间巡检完毕的路径以及小区合理配备巡检无人机的数量;
自适应控制子模块,根据续航能力和重点区域网格规划路线,根据放飞顺序和飞行路径设置回收点,实现无人机精确巡检重点网格。
作为本发明进一步的技术方案,所述精准导航模块包括:
GPS导航模块,通过接收飞行路径规划模块的命令,实现无人机沿飞行路径巡检;
RTK/INS定位模块,与GPS导航模块相连,用于实现无人机的精准定位;
其中,所述RTK/INS定位模块包括:
RTK定位子模块,用于获取无人机精确的位置数据;
INS惯性导航子模块,含有陀螺仪和加速度计,用于获取无人机的位姿信息;
RTK/INS滤波处理器,用于融合INS惯性导航子模块获得的无人机位姿数据和RTK定位子模块获得的无人机位置数据,以此获得高精度位置位姿信息,所述RTK/INS滤波处理器与飞行控制模块相连,准确地控制无人机沿飞行路径无偏差巡检燃气管道。
作为本发明进一步的技术方案,所述INS惯性导航子模块对陀螺仪和加速度器获取的数据进行处理得到速度和姿态角信息,从而获得无人机的位姿信息,将无人机位置信息与无人机的位姿信息通过RTK/INS滤波器结合能够在获得高精度位置信息的同时矫正INS导航参数,获得高精度位姿信息,通过飞行控制模块不断调整无人机位置和姿态,实现无人机沿燃气管道精确巡检。
作为本发明进一步的技术方案,所述无人机嵌入机群协同避障模块,所述机群协同避障模块包括:
超声波障碍感知模块,用于在无人机飞行过程中通过发射超声波,在感知到障碍物时接收超声波反射信号;
双目视觉精确测量模块,用于通过双目相机采集图像数据;
融合避障处理模块,用于接收超声波障碍感知模块采集的超声波反射信号和双目视觉精确测量模块所采集到的图像数据,通过数据融合处理两种数据,并通过三维障碍物重建反馈控制信息给飞行避障控制器。
作为本发明进一步的技术方案,所述机群协同避障模块以双目视觉精确测量模块为主感知模块,并辅以超声波障碍感知模块,所述双目视觉精确测量模块包括双目相机、双目视觉处理器,超声波障碍感知模块包括超声波传感器、超声波处理器,双目相机与双目视觉处理器直接相连,超声波传感器与超声波处理器直接相连,所述双目视觉处理器、超声波处理器与融合避障处理模块相连,通过避障融合处理模块的决策与数据转换实现无人机的自动避障。
作为本发明进一步的技术方案,所述无人机在飞行过程中通过双目相机采集图像信息,并将采集到的信息实时传输给双目视觉处理器;超声波传感器接收反射的超声波信号,将信息传输到超声波处理器得到超声波数据信息。
作为本发明进一步的技术方案,基于数据融合避障处理模块通过障碍感知算法处理超声波反射信号和图像数据这两种数据。
作为本发明进一步的技术方案,所述融合避障处理模块在融合两种数据通过对障碍物特征信息提取,实现特征点的精确匹配,依据特征点信息获得了障碍物中心位置及外形尺寸,并建立无人机和大地坐标系,根据无人机本身的地理位置信息通过两个坐标系之前的转换把障碍物在无人机的坐标位置转换到大地坐标系的位置中。
作为本发明进一步的技术方案,通过无人机飞行速度和障碍物与无人机的位置矢量变化范围判断障碍物是否为可移动障碍物,针对可移动障碍物通过连续时刻障碍物位置变化建立移动障碍物运动模型,预测障碍物位置变化情况。
作为本发明进一步的技术方案,利用双目视觉和超声波所获得的障碍物信息建立三维障碍物模型,并在无人机飞行预设路线与障碍物冲突时,输出控制信息,实现障碍物的提前躲避,并能够在躲避障碍物后通过航迹修正继续沿着预设路线进行巡检。
作为本发明进一步的技术方案,飞行避障控制器接收融合避障处理模块输出的反馈控制信息,然后通过飞行控制模块控制无人机实现绕飞障碍,实现无人机对障碍物的提前感知和实时规避。
作为本发明进一步的技术方案,所述航迹修正模块同时融合INS惯性导航子模块获取的无人机的位姿信息和双目视觉精确测量模块采集的图像数据,通过避障位置变化的偏差对无人机的航迹进行修正,实现无人机在避障后继续沿着原来的路径巡检燃气管道。
作为本发明进一步的技术方案,所述无人机在航迹修正时把双目视觉精确测量模块采集的图像数据融入INS惯性导航子模块中,在导航过程中如果无人机为了避障飞行姿态位置发生偏差,双目视觉精确测量模块通过双目相机利用人眼左右视差的原理,根据物体在两个镜头画面中的坐标的变化得到位置变化偏差,融入INS惯性导航子模块中,及时对无人机运动姿态进行纠偏。
作为本发明进一步的技术方案,所述激光监测模块包括:
激光遥感探测器,用于在无人机沿管线进行巡检时,收集发射的激光信号和反射的激光信号;
图像采集器,与相机相连,所述图像采集器通过相机采集燃气管道的图像信息;
云台,所述激光遥感探测器、相机和图像采集器搭载在云台上,所述云台嵌入无人机侧方,能够180度旋转,所述云台将激光遥感探测器收集的激光信号数据和图像采集器采集的图像信息数据通过数据传输模块传输给数据接收模块。
作为本发明进一步的技术方案,所述无人机沿管线巡检时,信息交互模块通过接收数据传输模块的激光信号数据,反演出甲烷浓度变化情况,在判断出燃气管道发生泄漏时,唤醒相机和图像采集器并下达命令,对燃气管道进行图像信息数据采集,并将数据传输到数据处理模块,通过机器视觉技术标记燃气管道泄漏位置,数据处理模块还具有记录泄漏甲烷气体浓度、泄漏场景捕获功能。
作为本发明进一步的技术方案,所述燃气管道发生泄漏时,无人机上的激光遥感探测器扫过泄漏点周围形成的CH
作为本发明进一步的技术方案,所述无人机上激光遥感探测器与相机并列安装,激光遥感探测器用于收发激光信号,相机在燃气巡检时能够采集图像信息,能够观测到燃气管道的实时状态,使用同一云台以保证激光光路与相机光路平行,在无人机在进行自动避障、转向动作时能够调整云台来改变激光指向,对燃气管道进行巡检。
作为本发明进一步的技术方案,所述飞行控制模块通过接收精准导航模块、机群协同避障模块、航迹修正模块的控制命令,通过不断调整飞行姿态使得无人机根据规划路线沿管线进行巡检。
作为本发明进一步的技术方案,无人机采用异地起降的方式进行巡检,同时根据路径规划的结果和保证无人机的有序回收合理规划放飞无人机的数量以及每架无人机的起落点的位置和飞行路径。
作为本发明进一步的技术方案,在所述飞行路径规划模块合理配置无人机数量的基础上设置冗余,在无人机执行任务失败时,用冗余无人机替代原无人机继续执行巡检任务,并实现巡检“接力”。
作为本发明进一步的技术方案,所述装载车作为移动基站,与无人机进行通讯,所述装载车接收并且处理无人机采集的数据,在无人机巡检过程中,回收无人机起落平台,根据无人机群降落时间,依次在无人机降落位置预放起落平台回收无人机。
与现有技术相比,本发明的有益效果是:本发明设计了一种基于无人机群协同的居民小区燃气管网泄漏巡检系统,融合双目视觉和超声波的数据信息,通过障碍物模型重建控制无人机避障飞行;通过飞行路径规划确定无人机群的各个巡检路线,并根据无人机的最大续航距离设置冗余,在无人机无法继续执行巡检任务时,派出新的无人机进行巡检“接力”,保证巡检进度;通过RTK/INS技术导航并用双目视觉测量的结果弥补INS导航的误差对航迹纠偏,实现无人机沿管线无偏差巡检;通过激光遥感监测燃气的变化以判断其是否发生泄漏并通过机器视觉标记燃气泄漏的位置,实现泄漏位置的精确定位。
附图说明
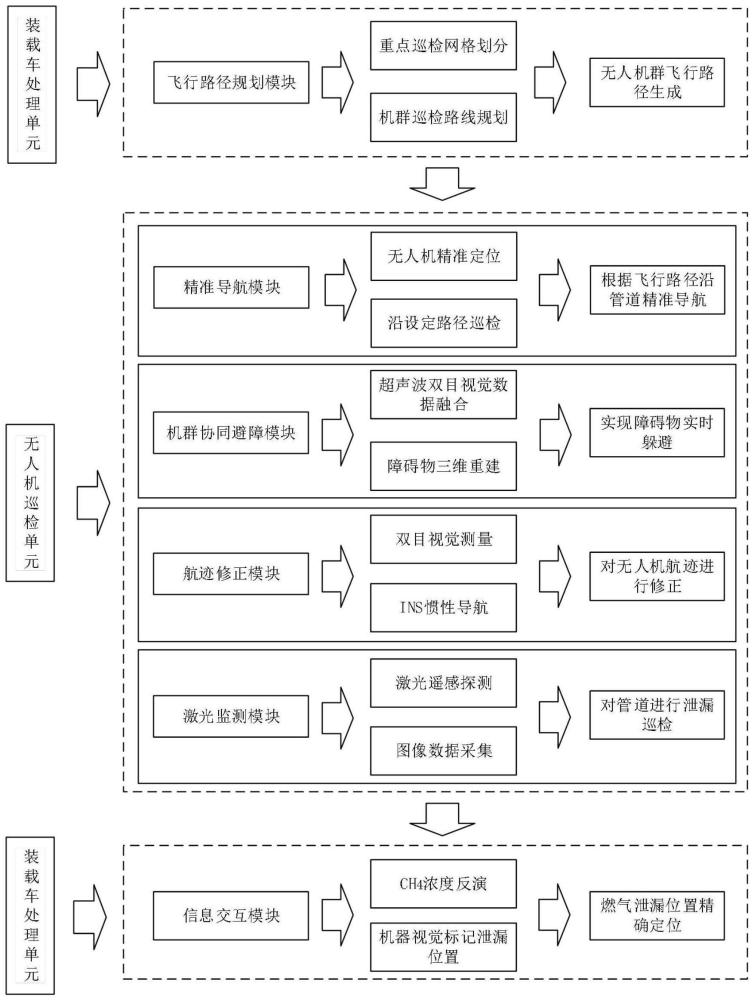
图1为本发明实施例提供的无人机群协同巡检整体框架图。
图2为本发明实施例提供的无人机群精准飞行流程图。
图3为本发明实施例提供的燃气泄漏识别定位流程图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
作为本发明的一种实施例,请参阅图1,一种基于无人机群协同的居民小区燃气管网泄漏巡检系统,包括:
无人机起落平台,用于实现无人机的放飞和回收;
装载车处理单元,用于规划无人机群的飞行路径,生成飞行轨迹,并输出航迹信号给无人机巡检单元,还用于处理接收到的燃气泄漏数据,实现燃气泄漏位置的精准定位;
无人机群巡检单元,用于通过飞行路径实现精准导航、障碍物实时躲避、避障后对航迹修正,以及对燃气管道泄漏的监测;
其中,所述装载车处理单元包括:
装载车,用于携带所述无人机起落平台,根据无人机群飞行路径放置在无人机起降的位置,实现无人机的自主起飞、降落;
飞行路径规划模块,用于生成无人机群飞行路径;
信息交互模块,用于精确定位燃气泄漏位置;
其中,所述无人机群巡检单元包括:
精准导航模块,用于根据飞行路径沿管道精准导航;
机群协同避障模块,用于实现障碍物实时躲避;
航迹修正模块,用于对无人机航迹进行修正;
激光监测模块,用于对管道进行泄漏巡检;
所述无人机群巡检单元还包括数据传输模块、信号接收模块、飞行控制模块;
其中,所述信息交互模块包括数据接收模块、数据处理模块、信号传输模块。
作为本发明的一种实施例,请参阅图2,所述飞行路径规划模块包括:
基线解算子模块,通过待巡检区域的地理信息位置建立三维网络模型,划分出重点巡检网格,规划无人机群最短时间巡检完毕的路径以及小区合理配备巡检无人机的数量;
自适应控制子模块,根据续航能力和重点区域网格规划路线,根据放飞顺序和飞行路径设置回收点,实现无人机精确巡检重点网格。所述飞行路径规划模块与信号传输模块相连,通过输出信号给精准导航模块发出命令,使得无人机群准确无误地沿飞行路径对燃气管网进行巡检。
所述飞行路径规划模块实现无人机群完整路径巡检的步骤如下:
步骤1:通过基线解算子模块在三维网络建模图层中建立坐标系,将居民小区待巡检区域燃气管网的每个节点坐标x、y、z输入建模图层依次建立节点,再根据每段管道长度,直径连接节点,实现整个巡检区域燃气管道的三维网络建模;把厨房入户段燃气管道作为无人机巡检监测重点区域,并把窗台四角坐标输入建模图层形成重点巡检网格。
步骤2:在居民小区楼进燃气管道地面端作为放飞点和回收点,保证能够放飞无人机和回收无人机,即每一栋楼的燃气管道底端既可以是放飞点也可以是回收点,设放飞点为m
步骤3:设v为无人机巡检时的平均时速,L为无人机的最远续航距离,每一栋楼所需巡检时间为T,巡检n栋楼所需巡检时间为nT,每架无人机应保证
步骤4:无人机在巡检到厨房入户段管道时,根据自适应控制子模块向精准导航模块发出命令在室外对厨房入户段管道进行扫描巡检,巡检完毕后继续沿管道进行巡检,直到下一住户,重复之前操作直到完成巡检任务回到回收点。
步骤5:根据步骤3、步骤4层层拓展即可确定巡检区域所需要的无人机数量,根据巡检区域各个放飞点在无人机起落平台依次放飞无人机,并根据放飞的顺序在回收点提前预设起落平台依次回收无人机,实现所有管线、所有重要目标点都能在最短时间内被巡检,并且能保证在无人机的最大续航能力范围内。
在本发明实施例中,所述精准导航模块包括:
GPS导航模块,通过接收飞行路径规划模块的命令,实现无人机沿飞行路径巡检;
RTK/INS定位模块,与GPS导航模块相连,用于实现无人机的精准定位;
其中,所述RTK/INS定位模块包括:
RTK定位子模块,用于获取无人机精确的位置数据;
INS惯性导航子模块,含有陀螺仪和加速度计,用于获取无人机的位姿信息;
RTK/INS滤波处理器,用于融合INS惯性导航子模块获得的无人机位姿数据和RTK定位子模块获得的无人机位置数据,以此获得高精度位置位姿信息,所述RTK/INS滤波处理器与飞行控制模块相连,准确地控制无人机沿飞行路径无偏差巡检燃气管道。
在本发明实施例中,所述INS惯性导航子模块对陀螺仪和加速度器获取的数据进行处理得到速度和姿态角信息,从而获得无人机的位姿信息,将无人机位置信息与无人机的位姿信息通过RTK/INS滤波器结合能够在获得高精度位置信息的同时矫正INS导航参数,获得高精度位姿信息,通过飞行控制模块不断调整无人机位置和姿态,实现无人机沿燃气管道精确巡检。
在本发明实施例中,所述无人机嵌入机群协同避障模块,所述机群协同避障模块包括:
超声波障碍感知模块,用于在无人机飞行过程中通过发射超声波,在感知到障碍物时接收超声波反射信号;
双目视觉精确测量模块,用于通过双目相机采集图像数据;
融合避障处理模块,用于接收超声波障碍感知模块采集的超声波反射信号和双目视觉精确测量模块所采集到的图像数据,通过数据融合处理两种数据,并通过三维障碍物重建反馈控制信息给飞行避障控制器。
在本发明实施例中,所述机群协同避障模块以双目视觉精确测量模块为主感知模块,并辅以超声波障碍感知模块,所述双目视觉精确测量模块包括双目相机、双目视觉处理器,超声波障碍感知模块包括超声波传感器、超声波处理器,双目相机与双目视觉处理器直接相连,超声波传感器与超声波处理器直接相连,所述双目视觉处理器、超声波处理器与融合避障处理模块相连,通过避障融合处理模块的决策与数据转换实现无人机的自动避障。双目相机采用两个USB摄像头和CMOS型号感光元件组合而成;双目视觉处理器采用Intelcomputer stick BOXSTK1AW32SCL集成处理器,支持双USB接口,能够与摄像头直接相连;超声波传感器采用KS103型号测距传感器,能够实现高精度测距;超声波处理器选用STM32F407VGT型号芯片进行处理,避障通过以下步骤实现:
步骤1:无人机在飞行过程中通过双目视觉采集图像信息,并将采集到的信息实时传输给双目视觉处理器;超声波传感器接收反射的超声波信号,将信息传输到超声波处理器得到超声波数据信息;
步骤2:基于数据融合避障处理模块通过障碍感知算法处理两种数据:
进行数据滤波:
设系统是线性的,测量噪声是高斯白噪声,状态方程为
T(k+1)=F(k)T(k)+D(k)U(k)+C(k)V(k)
其中T(k+1)表示k+1时刻的状态向量,F(k)表示k时刻m×m的状态转移矩阵,D(k)表示m×n阶输入矩阵,U(k)表示n维输入向量,C(k)表示m×n阶策动矩阵,V(k)表示n维扰动高斯白噪声。
量测方程是线性函数,既满足
O(k)=H(k)T(k)+W(k)
其中O(k)表示k时刻的q维向量,H(k)表示q×n阶量测矩阵,W(k)表示q维量测噪声,并满足高斯白噪声有
EW(k)=0EW(k)W
其中δ
进行数据融合:
假设V(k)和W(k)是相互独立的,满足EW(k)W
假设已知k时刻状态T(k)的滤波值
融合公式为:
T(k)=φ(k-1)+Ev(k-1)
Y(k)=CT(k)+Z(k)
其中T为状态向量,Φ为状态转移矩阵,E是策动矩阵,v为目标高斯白噪声,V(k)服从方差为w的高斯分布,Y为观测向量,C为观测矩阵,Z为观测高斯白噪声,Z(k)服从方差为w的高斯分布;
步骤3:融合避障处理模块在融合两种数据通过对障碍物特征信息提取,实现特征点的精确匹配,依据特征点信息获得了障碍物中心位置及外形尺寸,并建立无人机和大地坐标系,根据无人机本身的地理位置信息通过两个坐标系之前的转换把障碍物在无人机的坐标位置转换到大地坐标系的位置中;
步骤4:通过无人机飞行速度和障碍物与无人机的位置矢量变化范围判断障碍物是否为可移动障碍物,针对可移动障碍物通过连续时刻障碍物位置变化建立移动障碍物运动模型,预测障碍物位置变化情况;
步骤5:利用双目视觉和超声波所获得的障碍物信息建立三维障碍物模型,并在无人机飞行预设路线与障碍物冲突时,输出控制信息,实现障碍物的提前躲避,并能够在躲避障碍物后通过航迹修正继续沿着预设路线进行巡检;
步骤6:最终飞行避障控制器接收融合避障处理模块输出的反馈控制信息,然后通过飞行控制模块控制无人机实现绕飞障碍,实现无人机对障碍物的提前感知和实时规避。
在本发明实施例中,所述航迹修正模块同时融合INS惯性导航子模块获取的无人机的位姿信息和双目视觉精确测量模块采集的图像数据,通过避障位置变化的偏差对无人机的航迹进行修正,实现无人机在避障后继续沿着原来的路径巡检燃气管道。
在本发明实施例中,所述无人机在航迹修正时把双目视觉精确测量模块采集的图像数据融入INS惯性导航子模块中,在导航过程中如果无人机为了避障飞行姿态位置发生偏差,双目视觉精确测量模块通过双目相机利用人眼左右视差的原理,根据物体在两个镜头画面中的坐标的变化得到位置变化偏差,融入INS惯性导航子模块中,及时对无人机运动姿态进行纠偏。
在本发明实施例中,所述激光监测模块包括:
激光遥感探测器,用于在无人机沿管线进行巡检时,收集发射的激光信号和反射的激光信号;
图像采集器,与相机相连,所述图像采集器通过相机采集燃气管道的图像信息;
云台,所述激光遥感探测器、相机和图像采集器搭载在云台上,所述云台嵌入无人机侧方,能够180度旋转,所述云台将激光遥感探测器收集的激光信号数据和图像采集器采集的图像信息数据通过数据传输模块传输给数据接收模块。
激光遥感探测器采用DFB激光器和PIN光电探测器组合而成;图像采集器采用PCIE1181/1182网卡,能够实现对图像数据的高效采集。
作为本发明的一种实施例,请参阅图3,所述无人机沿管线巡检时,信息交互模块通过接收数据传输模块的激光信号数据,反演出甲烷浓度变化情况,在判断出燃气管道发生泄漏时,唤醒相机和图像采集器并下达命令,对燃气管道进行图像信息数据采集,并将数据传输到数据处理模块,通过机器视觉技术标记燃气管道泄漏位置,数据处理模块还具有记录泄漏甲烷气体浓度、泄漏场景捕获功能。
在本发明实施例中,所述燃气管道发生泄漏时,无人机上的激光遥感探测器扫过泄漏点周围形成的CH
步骤1:当燃气管道或重点巡检网格发生泄漏,激光遥感探测器扫过巡检区域时,将激光遥感探测器输出光的中心频率与CH
L(v)=L
式中,L(v)为频率v处CH
由于近红外波段气体对光的吸收系数很小,输出光和输入光的关系可表示为:
Q(v)=sQ
式中,Q(v)为光电探测器接收的光功率;s为光收集效率;Q
根据以上公式可以得出可以得出一次谐波和二次谐波分别为:
Q
Q
可以看出,二次谐波含有CH
结合上述公式可得监测到的CH
步骤2:数据处理模块通过上述计算即可得到瓦斯的浓度变化情况,浓度最高点即为瓦斯泄漏的位置;
步骤3:为消除风速等因素对监测瓦斯浓度影响,辅以机器视觉标记燃气泄漏位置,提高漏点定位的精度。
首先采用频域描绘图像采集卡采集到的图像空间信息,则有:
式中:F为傅里叶变换;γ为图像采集卡采集到的图像集合的平均傅里叶幅度;
根据上式所示的图像变换规则,可以得到图像的log谱,然后对其进行均值滤波处理,则有:
W=V·h
式中:W为V经过均值滤波处理后的log谱;V为未经过均值滤波处理的原log谱;h
根据上述计算得到的V和W,可以获得谱残差R=W-V。在此条件下,所得到的R中含有燃气管道图像的显著信息,为此,设空间域的显著图为S;傅里叶变换操作后的相位为
式中:F
在本发明实施例中,所述无人机上激光遥感探测器与相机并列安装,激光遥感探测器用于收发激光信号,相机在燃气巡检时能够采集图像信息,能够观测到燃气管道的实时状态,使用同一云台以保证激光光路与相机光路平行,在无人机在进行自动避障、转向动作时能够调整云台来改变激光指向,对燃气管道进行巡检。
在本发明实施例中,所述飞行控制模块通过接收精准导航模块、机群协同避障模块、航迹修正模块的控制命令,通过不断调整飞行姿态使得无人机根据规划路线沿管线进行巡检。
在本发明实施例中,无人机采用异地起降的方式进行巡检,同时根据路径规划的结果和保证无人机的有序回收合理规划放飞无人机的数量以及每架无人机的起落点的位置和飞行路径。
在本发明实施例中,在所述飞行路径规划模块合理配置无人机数量的基础上设置冗余,在无人机执行任务失败时,用冗余无人机替代原无人机继续执行巡检任务,并实现巡检“接力”。
在本发明实施例中,所述装载车作为移动基站,与无人机进行通讯,所述装载车接收并且处理无人机采集的数据,在无人机巡检过程中,回收无人机起落平台,根据无人机群降落时间,依次在无人机降落位置预放起落平台回收无人机。
应该理解的是,虽然本发明各实施例的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,各实施例中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一非易失性计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦除可编程ROM(EEPROM)或闪存。易失性存储器可包括随机存取存储器(RAM)或者外部高速缓冲存储器。作为说明而非局限,RAM以多种形式可得,诸如静态RAM(SRAM)、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据率SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、同步链路(Synchlink)DRAM(SLDRAM)、存储器总线(Rambus)直接RAM(RDRAM)、直接存储器总线动态RAM(DRDRAM)、以及存储器总线动态RAM(RDRAM)等。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。