一种基于能量分析的无人机任务规划方法及装置
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及无人机技术领域,特别是涉及一种基于能量分析的无人机任务规划方法及装置。
背景技术
多旋翼无人机是近年来的研究热点之一,凭借其优秀的低空低速稳定飞行能力和灵活的机动能力,在航拍,巡检,军事侦察等领域大放异彩。然而,当前无人机大多还是采用的锂电池电池组,由于锂电池放电特性的非线性,难以通过一种有效而精准的测量方法去获取当前的荷电状态。那么对于任务执行中的无人机来说,剩余电量的不精确可能会使无人机出现一些决策上的失误,比如误判电量提前返航或者电量耗尽导致坠机。
目前,现有的电量测量通常包括两种方法,一是根据电池的放电曲线,通过电池电压的变化判断当前的放电程度,虽然经过校准处理,但是这种方法精度很低,远远不能达到控制要求。另一种方法是通过测量电流和时间来计算这段时间内电量的消耗,但是因为电池本身的复杂性,即便数据经过校准修正,准确度也较低。
发明内容
有鉴于此,本发明提供一种基于能量分析的无人机任务规划方法及装置,主要目的在于通过回归方法对无人机进行电量预估,并提供一种在线计算无人机能量消耗情况,并对返航时间进行决策的方法。让无人机在任务执行过程中,能够最大化效率并且安全返航。
依据本发明一个方面,提供了一种基于能量分析的无人机任务规划方法,包括:
获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;
利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,其中,所述飞行速度及所述飞行加速度与所述运动模式之间具有映射关系;
根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;
根据获取的电池容量以及所述已消耗电量,得到电池余量;
根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;
将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
进一步地,所述根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量,包括:
根据预设的返航距离公式以及所述位置坐标,计算返航距离;
根据所述预设的返航运动模式,匹配相应的返航速度及能量消耗率;
根据预设的返航持续时间公式,对所述返航距离以及返航速度进行处理,得到返航持续时间;
根据预设的返航能量公式,对所述返航持续时间以及所述能量消耗率进行处理,得到无人机返航所需能量。
可选地,所述根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量之前,所述方法还包括:
建立最小二乘回归模型,利用所述最小二乘回归模型对能量消耗模型进行参数优化。
可选地,所述获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率之前,所述方法还包括:
对无人机的运动模式进行划分;
采集各运动模式下的飞行速度、飞行加速度、持续时间以及能量消耗率;
根据各运动模式的持续时间,建立时间矩阵;
根据各运动模式的能量消耗率,建立能量权重矩阵。
可选地,所述根据各运动模式的能量消耗率,建立能量权重矩阵之后,所述方法还包括:
获取飞行控制器的能量消耗率;
根据所述能量权重矩阵、时间信息矩阵以及所述飞行控制器的能量消耗率,建立能量消耗模型。
进一步地,所述根据获取的电池容量以及所述已消耗电量,得到电池余量,包括:
获取电池的相对真实容量;
根据所述电池的真实容量以及预设的比例参数,得到电池的可用容量;
将所述电池可用容量与所述已消耗电量之差确定为所述无人机的电池余量。
依据本发明二个方面,提供了一种基于能量分析的无人机任务规划装置,包括:
获取单元,用于获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;
匹配单元,用于利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,其中,所述飞行速度及所述飞行加速度与所述运动模式之间具有映射关系;
第一处理单元,用于根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;
第二处理单元,用于根据获取的电池容量以及所述已消耗电量,得到电池余量;
计算单元,用于根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;
决策单元,用于将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
进一步地,所述计算单元,包括:
计算模块,用于根据预设的返航距离公式以及所述位置坐标,计算返航距离;
匹配模块,用于根据所述预设的返航运动模式,匹配相应的返航速度及能量消耗率;
第一处理模块,用于根据预设的返航持续时间公式,对所述返航距离以及返航速度进行处理,得到返航持续时间;
第二处理模块,用于根据预设的返航能量公式,对所述返航持续时间以及所述能量消耗率进行处理,得到无人机返航所需能量。
进一步地,所述装置还包括:
优化单元,用于建立最小二乘回归模型,利用所述最小二乘回归模型对能量消耗模型进行参数优化。
进一步地,所述装置还包括:
划分单元,用于对无人机的运动模式进行划分;
采集单元,用于采集各运动模式下的飞行速度、飞行加速度、持续时间以及能量消耗率;
建立单元,用于根据各运动模式的持续时间,建立时间矩阵;
所述建立单元具体还用于根据各运动模式的能量消耗率,建立能量权重矩阵。
进一步地,所述获取单元具体还用于获取飞行控制器的能量消耗率;
所述建立单元还用于根据所述能量权重矩阵、时间信息矩阵以及所述飞行控制器的能量消耗率,建立能量消耗模型。
进一步地,所述处理单元,包括:
获取模块,用于获取电池的相对真实容量;
第三处理模块,用于根据所述电池的真实容量以及预设的比例参数,得到电池的可用容量;
确定单元,用于将所述电池可用容量与所述已消耗电量之差确定为所述无人机的电池余量。
依据本发明第三方面,提供了一种存储介质,所述存储介质中存储有至少一可执行指令,所述执行指令使处理器执行以下步骤:获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,其中,所述飞行速度及所述飞行加速度与所述运动模式之间具有映射关系;根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
依据本发明第四方面,提供了一种计算机设备,包括处理器、存储器、通信接口和通信总线所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信,所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行以下步骤:获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,其中,所述飞行速度及所述飞行加速度与所述运动模式之间具有映射关系;根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
本发明提供一种基于能量分析的无人机任务规划方法及装置,与现有技术根据电池的放电曲线,通过电池电压的变化判断当前的放电程度相比,本发明通过将获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,其中,所述飞行速度及所述飞行加速度与所述运动模式之间具有映射关系;根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。从而能够通过回归方法对无人机进行电量预估,并提供一种在线计算无人机能量消耗情况,并对返航时间进行决策的方法。让无人机在任务执行过程中,能够最大化效率并且安全返航。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
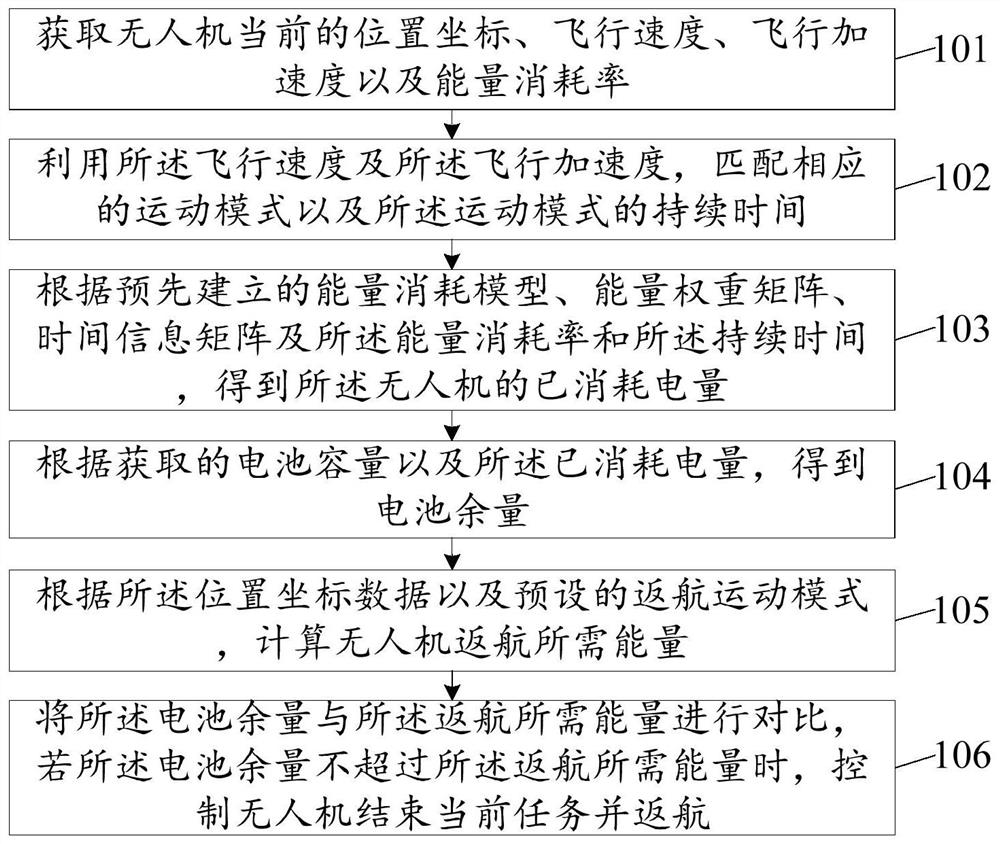
图1示出了本发明实施例提供的一种基于能量分析的无人机任务规划方法流程图;
图2示出了本发明实施例提供的另一种基于能量分析的无人机任务规划方法流程图;
图3示出了本发明实施例提供的一种基于能量分析的无人机任务规划程序图;
图4示出了本发明实施例提供的一种基于能量分析的无人机任务规划装置的结构示意图;
图5示出了本发明实施例提供的一种计算机设备的实体结构示意图。
具体实施方式
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
如背景技术所述,目前,现有的电量测量通常包括两种方法,一是根据电池的放电曲线,通过电池电压的变化判断当前的放电程度,虽然经过校准处理,但是这种方法精度很低,远远不能达到控制要求。另一种方法是通过测量电流和时间来计算这段时间内电量的消耗,但是因为电池本身的复杂性,即便数据经过校准修正,准确度也较低。
为了解决上述问题,本发明实施例提供了一种基于能量分析的无人机任务规划方法,如图1所示,所述方法包括:
101、获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率。
其中,所述无人机当前的位置坐标是指以无人机出发点为坐标原点建立的惯性坐标系中,无人机当前位置的坐标;所述飞行速度、飞行加速度是指所述无人机在以某种运动模式飞行时的飞行速度和飞行加速度,其具体的值可以通过预设在无人机上的传感器检测得到;所述能量消耗率可以为所述无人机以某种运动模式飞行时的能量消耗率,其具体的值可以通过手动分析闪存日志,通过Mavlink下载日志,在CURRENT模块中得到不同运动模式下的耗电量,从而计算得到能量消耗率。
102、利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间。
其中,所述运动模式可以包括:悬停模式,垂直上升模式,加速平飞模式,匀速平飞模式,减速平飞模式,垂直下降模式等。所述飞行速度及所述飞行加速度与所述运动模式之间可以具有映射关系。所述运动模式的持续时间可以为无人机在某种运动模式下持续飞行的时间,具体可以根据所述运动模式,在飞行状态日志中获取。具体地,在得到所述无人机的飞行速度及所述飞行加速度后,可以匹配对应的运动模式,并根据所述运动模式在飞行状态日志中获取对应的持续时间。
103、根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量。
具体地,在得到无人机当前的能量消耗率和持续时间后,可以利用所述能量消耗模型进行处理,得到所述无人机当前的已消耗电量。从而能够实现快速的计算当前的已消耗电量,为无人机的运动决策提供数据依据。将当前无人机的加速度和速度情况与已知的运动模式做一个映射,通过在线匹配,判断当前无人机的运动模式p
C
其中:k=1,2,3……。
104、根据获取的电池容量以及所述已消耗电量,得到电池余量。
其中,所述电池容量可以为无人机携带电池的电池容量,在得到所述已消耗电量之后,可以计算电池容量与已消耗电量之差,从而能够得到当前电池的剩余电量,即所述电池余量,以便于为后续无人机的运动决策提供数据依据。
105、根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量。
具体地,可以根据预设的返航距离公式以及所述位置坐标,计算返航距离,根据所述预设的返航运动模式,匹配相应的返航速度及能量消耗率,根据预设的返航持续时间公式,对所述返航距离以及返航速度进行处理,得到返航持续时间,根据预设的返航能量公式,对所述返航持续时间以及所述能量消耗率进行处理,得到无人机返航所需能量。从而能够更加方便快捷的得到无人机返航所需的能量,为无人机后续任务的决策提供数据支持。
106、将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
具体地,可以将所述电池余量与所述返航所需能量进行实时对比,当所述电池余量等于返航所需能量时,控制无人机结束当前任务,进行返航。本发明实施例通过电池余量与返航所需能量进行对比,在电池余量达到返航所需能量时才进行返航,可以避免无人机频繁的返航,并减小能量不足中途迫降的可能性,最大化提高完成任务的效率。
本发明提供一种基于能量分析的无人机任务规划方法,能够通过将获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。从而能够通过回归方法对无人机进行电量预估,并提供一种在线计算无人机能量消耗情况,并对返航时间进行决策的方法。让无人机在任务执行过程中,能够最大化效率并且安全返航。
本发明实施例提供了另一种基于能量分析的无人机任务规划方法,如图2所示,该方法包括:
201、对无人机的运动模式进行划分;采集各运动模式下的飞行速度、飞行加速度、持续时间以及能量消耗率;根据各运动模式的持续时间,建立时间矩阵;根据各运动模式的能量消耗率,建立能量权重矩阵。
其中,每个运动模式所对应的不同能量消耗率可以表示为w
其中:P表示无人机运动模式信息,P
所述能量权重矩阵可以为根据得到的能量消耗率不同进行定义的,所述能量权重矩阵具体可以定义为:
其中:W表示能量消耗率,w
所述时间信息矩阵具体可以表示为
其中,T表示时间信息矩阵,t
对于本发明实施例,在所述步骤201之后,所述方法还包括:获取飞行控制器的能量消耗率;根据所述能量权重矩阵、时间信息矩阵以及所述飞行控制器的能量消耗率,建立能量消耗模型。
其中,所述能量消耗模型具体可以为:
F=f(w,t),w为权重,t为时间。即:
F=w
其中:F可以表示飞行过程中各个运动模式下能量消耗的总和,w
写成矩阵范数的形式表示为:
F=||W
其中:||·||
对于本发明实施例,所述根据所述能量权重矩阵、时间信息矩阵以及所述飞行控制器的能量消耗率,建立能量消耗模型之后,所述方法还包括:建立最小二乘回归模型,利用所述最小二乘回归模型对能量消耗模型进行参数优化。
具体地,在飞行日志中记录有无人机在不同运动模式下所用能耗值,用e
为了取得更加准确的权重,对以上模型E建立最小二乘回归模型:
其矩阵范式形式可以为:
其中:||·||
利用采集到的数据对所述最小二乘回归模型不断进行优化和迭代,得到更加接近真值的能量权重矩阵W,从而得到更加精确地能量消耗模型模型F。
202、获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率。
本步骤与图1所示的步骤101方法相同,在此不再赘述。
203、利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间。
本步骤与图1所示的步骤102方法相同,在此不再赘述。
204、根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量。
本步骤与图1所示的步骤103方法相同,在此不再赘述。
205、根据获取的电池容量以及所述已消耗电量,得到电池余量。
本步骤与图1所示的步骤104方法相同,在此不再赘述。
对于本发明实施例,如图2所示,所述步骤205具体可以包括:获取电池的相对真实容量;根据所述电池的真实容量以及预设的比例参数,得到电池的可用容量;将所述电池可用容量与所述已消耗电量之差确定为所述无人机的电池余量。
在实际应用场景中,电池标称容量可以定义为C
定义C
定义电池余量为C
C
206、根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量。
本步骤与图1所示的步骤105方法相同,在此不再赘述。
对于本发明实施例,如图2所示,所述步骤206具体可以包括:根据预设的返航距离公式以及所述位置坐标,计算返航距离;根据所述预设的返航运动模式,匹配相应的返航速度及能量消耗率;根据预设的返航持续时间公式,对所述返航距离以及返航速度进行处理,得到返航持续时间;根据预设的返航能量公式,对所述返航持续时间以及所述能量消耗率进行处理,得到无人机返航所需能量。
具体地,无人机当前在惯性坐标系下的位置坐标表示为(x,y,z),根据当前的位置坐标,计算返航距离,所述返航距离公式包括:
其中,S表示返航距离,x、y分别表示无人机在水平面上的横、纵坐标。
根据预设的返航运动模式,可以匹配相应的返航速度及能量消耗率,在实际应用场景中,也可以根据所述返航距离选择合适的返航速度,所述返航持续时间公式包括:
t
其中,t
根据预设的返航能量公式,对所述持续时间及所述能量消耗率进行处理,得到无人机返航所需能量。所述返航能量公式可以包括:
C
其中:C
207、将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
本步骤与图1所示的步骤106方法相同,在此不再赘述。
本发明提供一种基于能量分析的无人机任务规划方法,能够通过将获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。从而能够通过回归方法对无人机进行电量预估,并提供一种在线计算无人机能量消耗情况,并对返航时间进行决策的方法。让无人机在任务执行过程中,能够最大化效率并且安全返航。
进一步地,作为图1的具体实现,本发明实施例提供了一种基于能量分析的无人机任务规划装置,如图3所示,所述装置包括:获取单元31、匹配单元32、第一处理单元33、第二处理单元34、计算单元35和决策单元36。
所述获取单元31,可以用于获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;
所述匹配单元32,可以用于利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,其中,所述飞行速度及所述飞行加速度与所述运动模式之间具有映射关系;
所述第一处理单元33,可以用于根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;
所述第二处理单元34,可以用于根据获取的电池容量以及所述已消耗电量,得到电池余量;
所述计算单元35,可以用于根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;
所述决策单元36,可以用于将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
进一步地,所述计算单元35,包括:
计算模块351,可以用于根据预设的返航距离公式以及所述位置坐标,计算返航距离;
匹配模块352,可以用于根据所述预设的返航运动模式,匹配相应的返航速度及能量消耗率;
第一处理模块353,可以用于根据预设的返航持续时间公式,对所述返航距离以及返航速度进行处理,得到返航持续时间;
第二处理模块354,可以用于根据预设的返航能量公式,对所述返航距离、返航速度以及所述能量消耗率进行处理,得到无人机返航所需能量。
进一步地,所述装置还包括:
优化单元37,可以用于建立最小二乘回归模型,利用所述最小二乘回归模型对能量消耗模型进行参数优化。
进一步地,所述装置还包括:
划分单元38,可以用于对无人机的运动模式进行划分;
采集单元39,可以用于采集各运动模式下的飞行速度、飞行加速度、持续时间以及能量消耗率;
建立单元310,可以用于根据各运动模式的持续时间,建立时间矩阵;
所述建立单元310具体还用于根据各运动模式的能量消耗率,建立能量权重矩阵。
进一步地,所述获取单元31具体还可以可以用于获取飞行控制器的能量消耗率;
所述建立单元310还可以用于根据所述能量权重矩阵、时间信息矩阵以及所述飞行控制器的能量消耗率,建立能量消耗模型。
进一步地,所述第二处理单元34,包括:
获取模块341,可以用于获取电池的相对真实容量;
第三处理模块342,可以用于根据所述电池的真实容量以及预设的比例参数,得到电池的可用容量;
确定模块343,可以用于将所述电池可用容量与所述已消耗电量之差确定为所述无人机的电池余量。
需要说明的是,本发明实施例提供的一种基于能量分析的无人机任务规划装置所涉及各功能模块的其他相应描述,可以参考图1所示方法的对应描述,在此不再赘述。
基于上述如图1所示方法,相应的,本发明实施例还提供了一种存储介质,所述存储介质中存储有至少一可执行指令,所述执行指令使处理器执行以下步骤:获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间,其中,所述飞行速度及所述飞行加速度与所述运动模式之间具有映射关系;根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
基于上述如图1所示方法和如图4所示装置的实施例,本发明实施例还提供了一种计算机设备,如图5所示,处理器(processor)41、通信接口(Communications Interface)42、存储器(memory)43、以及通信总线44。其中:处理器41、通信接口42、以及存储器43通过通信总线44完成相互间的通信。通信接口44,用于与其它设备比如用户端或其它服务器等的网元通信。处理器41,用于执行程序,具体可以执行上述基于能量分析的无人机任务规划方法实施例中的相关步骤。具体地,程序可以包括程序代码,该程序代码包括计算机操作指令。处理器41可能是中央处理器CPU,或者是特定集成电路ASIC(Application SpecificIntegrated Circuit),或者是被配置成实施本发明实施例的一个或多个集成电路。
终端包括的一个或多个处理器,可以是同一类型的处理器,如一个或多个CPU;也可以是不同类型的处理器,如一个或多个CPU以及一个或多个ASIC。存储器43,用于存放程序。存储器43可能包含高速RAM存储器,也可能还包括非易失性存储器(non-volatilememory),例如至少一个磁盘存储器。程序具体可以用于使得处理器41执行以下操作:获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间;根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。
通过本发明的技术方案,能够获取无人机当前的位置坐标、飞行速度、飞行加速度以及能量消耗率;利用所述飞行速度及所述飞行加速度,匹配相应的运动模式以及所述运动模式的持续时间;根据预先建立的能量消耗模型、能量权重矩阵、时间信息矩阵及所述能量消耗率和所述持续时间,得到所述无人机的已消耗电量;根据获取的电池容量以及所述已消耗电量,得到电池余量;根据所述位置坐标以及预设的返航运动模式,计算无人机返航所需能量;将所述电池余量与所述返航所需能量进行对比,若所述电池余量不超过所述返航所需能量时,控制无人机结束当前任务并返航。从而通过回归方法对无人机进行电量预估,并提供一种在线计算无人机能量消耗情况,并对返航时间进行决策的方法。让无人机在任务执行过程中,能够最大化效率并且安全返航
显然,本领域的技术人员应该明白,上述的本发明的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在存储装置中由计算装置来执行,并且在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。这样,本发明不限制于任何特定的硬件和软件结合。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
- 一种基于能量分析的无人机任务规划方法及装置
- 一种基于能量分析的载重无人机任务规划方法