一种基于以太网控制的直流无刷物流分拣驱动器
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及物流分拣技术领域,尤其是一种基于以太网控制的直流无刷物流分拣驱动器。
背景技术
快递分拣行业的技术不断革新推进,快件分拣由原来的人工分拣过渡到自动化分拣,分拣小车为交叉带分拣系统中核心组成部分,其分拣性能直接影响整个分拣处理系统的性能,传统的分拣小车采用RS485通信控制,为保证通信的可靠性距离等因素一般通信速率只能设置9600bps,实际应用中在一条交叉环线上存在一两百台小车同时通讯,多组数据密集交互限制了分拣系统的运行效率,同时RS485多设备通信增加了通信冲突的几率,这也导致采用传统的通讯的分拣系统错分拣率不低于万分之五,同时交叉带环线速度限制在2m/s内,此类现场应用中RS485通信存在接线错乱,故障排查、固件升级不便等问题。
鉴于上述情况,急需一种新的技术方案来解决上述问题。
发明内容
本发明针对现有技术的不足,提出一种基于以太网控制的直流无刷物流分拣驱动器,适用于物流分拣行业,采用Ethernet(以太网)控制,从通信层面上提升交叉带环形分拣系统的速率与稳定性,将交叉带环形分拣系统的线速度提升近一倍;结合PLC控制,可实现快递分拣系统的智能化,具有高效率,高准确率,高自动化的优势;同时加入以太网升级固件功能,实现一根电缆线完成通信、控制、调试、升级等功能,极大的方便交叉带环线物流分拣系统初期的调试使用与后期的升级维护。
为了实现上述发明目的,本发明提供以下技术方案:
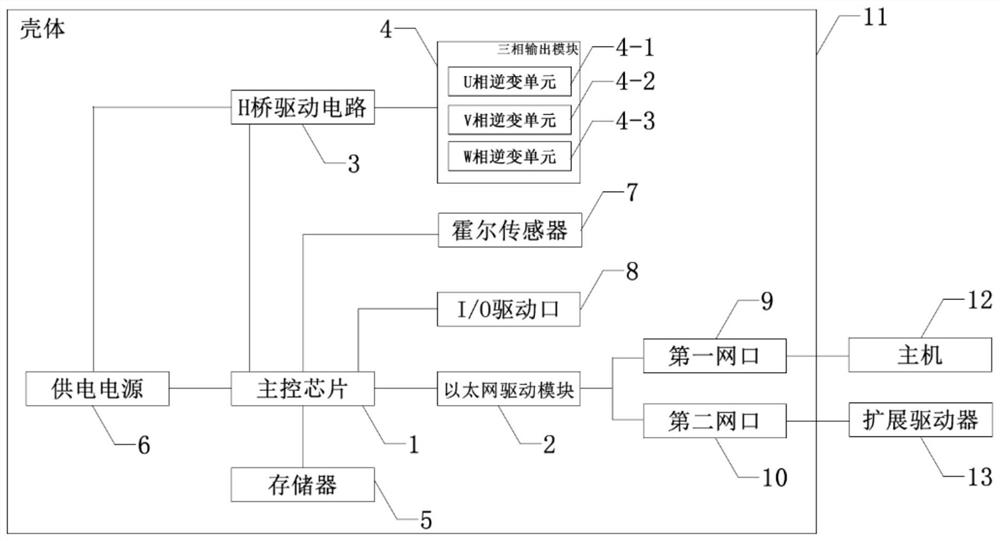
一种基于以太网控制的直流无刷物流分拣驱动器,包括主控芯片,所述主控芯片上分别连接有H桥驱动电路、霍尔传感器、I/O驱动口、以太网驱动模块和存储器;所述H桥驱动电路与三相输出模块连接,所述三相输出模块与电机连接,用于控制所述电机的运行;所述霍尔传感器用于接收所述电机的霍尔信号,实现对所述电机的监控;所述I/O驱动口用于接收外部控制信号,所述控制信号包括方向信号和运行信号;所述存储器用于存储控制程序和用户信息;所述太网驱动模块上连接有第一网口和第二网口,所述第一网口和所述第二网口可用于与外部主机或扩展驱动器连接;还包括用于给所述主控芯片和所述H桥驱动电路供电的供电电源。
优选的,所述三相输出模块包括U相逆变单元、V相逆变单元和W相逆变单元;所述电机包括动力线U、动力线V、动力线W和霍尔信号线,所述霍尔信号线有五根,包括三根信号线、一根接地线和一根电源线;所述动力线U与所述U相逆变单元连接、所述动力线V与所述V相逆变单元连接、所述动力线W与所述W相逆变单元连接;所述信号线用于与所述霍尔传感器连接。
优选的,所述主控芯片为stm32微控芯片。
优选的,所述主机包括上位机或PLC设备。
优选的,还包括一个壳体,所述主控芯片、所述H桥驱动电路、所述霍尔传感器、所述以太网驱动模块、所述存储器、所述三相输出模块和所述供电电源均设置于所述壳体内,所述I/O驱动口、所述第一网口、所述第二网口、所述三相输出模块对应的连接口和所述霍尔传感器对应的连接口均设置于所述壳体的侧面。
优选的,所述电机为BLDC物流滚筒电机。
优选的,所述供电电源为低压直流电源,供电电压常用值为36V或48V。
有益效果
本发明所提供的一种基于以太网控制的直流无刷物流分拣驱动器,适用于物流行业,采用Ethernet(以太网)控制,从通信层面上提升交叉带环形分拣系统的速率与稳定性,将交叉带环形分拣系统的线速度提升近一倍;结合PLC控制,可实现快递分拣系统的智能化,具有高效率,高准确率,高自动化的优势;同时加入以太网升级固件功能,实现一根电缆线完成通信、控制、调试、升级等功能,极大的方便交叉带环线物流分拣系统初期的调试使用与后期的升级维护。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
图1为本发明所述一种基于以太网控制的直流无刷物流分拣驱动器的结构示意图;
图2为本发明所述一种基于以太网控制的直流无刷物流分拣驱动器的报文校验流程;
图3为本发明所述一种基于以太网控制的直流无刷物流分拣驱动器的UDP报文具体格式;
图4为本发明所述一种基于以太网控制的直流无刷物流分拣驱动器广播通信流程。
图示标记:
1-主控芯片、2-以太网驱动模块、3-H桥驱动电路、4-三相输出模块、4-1-U相逆变单元、4-2-V相逆变单元、4-3-W相逆变单元、5-存储器、6-供电电源、7-霍尔传感器、8-I/O驱动口、9-第一网口、10-第二网口、11-壳体、12-主机、13-扩展驱动器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,一种基于以太网控制的直流无刷物流分拣驱动器,具体为一种用于物流分拣小车中控制驱动BLDC物流滚筒电机(无刷直流电机(Brushless Direct CurrentMotor,BLDCM)克服了有刷直流电机的先天性缺陷,以电子换向器取代了机械换向器)的驱动器,包括主控芯片1,所述主控芯片1上分别连接有H桥驱动电路3、霍尔传感器7、I/O驱动口8、以太网驱动模块2和存储器5;所述H桥驱动电路3与三相输出模块4连接,所述三相输出模块4与电机连接,用于控制所述电机的运行;所述霍尔传感器7用于接收所述电机的霍尔信号,实现对所述电机转子位置的监控;所述I/O驱动口8用于接收外部控制信号,所述控制信号包括方向信号和运行信号;所述存储器5用于存储控制程序和用户信息;所述太网驱动模块2上连接有第一网口9和第二网口10,所述第一网口9和所述第二网口10可用于与外部主机12或扩展驱动器13连接;还包括用于给所述主控芯片1和所述H桥驱动电路3供电的供电电源6。
具体的,所述主控芯片1为stm32微控芯片,驱动器采用基于STM32芯片三相全桥控制,其中,H桥驱动电路3用于产生PWM脉冲控制输出(H桥是一个典型的直流电机控制电路,因为它的电路形状酷似字母H,故得名与“H桥”,4个三极管组成H的4条垂直腿,而电机就是H中的横杠。),并通过所述三相输出模块4输出给电机,达到控制电机运动的目的。本实施例中的所述主机12包括上位机或PLC设备;所述供电电源为低压直流电源,供电电压常用值为36V或48V。
本实施例中,所述三相输出模块4包括U相逆变单元4-1、V相逆变单元4-2和W相逆变单元4-3;所述电机包括动力线U、动力线V、动力线W和霍尔信号线,所述霍尔信号线有五根,包括三根信号线、一根接地线和一根电源线;所述动力线U与所述U相逆变单元4-1连接、所述动力线V与所述V相逆变单元4-2连接、所述动力线W与所述W相逆变单元4-3连接;所述信号线用于与所述霍尔传感器7连接,便于主控芯片1实时获取电机的霍尔信号。
还包括一个壳体11,所述主控芯片1、所述H桥驱动电路3、所述霍尔传感器7、所述以太网驱动模块2、所述存储器5、所述三相输出模块4和所述供电电源6均设置于所述壳体11内,所述I/O驱动口8、所述第一网口9、所述第二网口10、所述三相输出模块4对应的连接口和所述霍尔传感器7对应的连接口均设置于所述壳体11的侧面。
作为本驱动器对电机的控制方式,有如下两种:
方式1:以太网驱动模块2通过第一网口或第二网口与主机进行Ethernet通信,将主机输出的控制监控等指令传输给主控芯片1,主控芯片1接收指令完成对驱动器参数的设置,并将相关参数存储于存储器5内(或对历史数据实现覆盖更新),主控芯片1将调整后的PWM脉冲信号输出到H桥驱动电路3,完成对BLDC电机的控制;
方式2:通过所述I/O驱动口8与外部PLC连接,接受PLC发出指令,将PLC输出的控制监控等指令传输给主控芯片1,主控芯片1接收指令完成对驱动器参数的设置,并将相关参数存储于存储器5内(或对历史数据实现覆盖更新),主控芯片1将调整后的PWM脉冲信号输出到H桥驱动电路3,完成对BLDC电机的控制。
每台驱动器出厂预设默认的IP地址,用户可以自行设置IP作为同一局域网不同驱动器的标识,每台驱动器分配唯一的MAC地址作为驱动器网络标志,广播通信中增加使用驱动站点号,作为不同驱动器的标识。
作为本驱动器的通信类型,可实现TCP、UDP、广播通信三类通信功能选择,用于适应不同的功能要求,每种通信协议采用不同的网络通信端口与对应的Modbus通信协议报文帧标识,具体为:
TCP通信:TCP通讯主要用于驱动器与上位机通信、以太网升级。数据帧报文格式为标准的Modbus/TCP格式,包括0x03读寄存器指令,0x06写寄存器指令,0x10写多个寄存器指令等,上位机通过以太网驱动接口读取驱动器寄存器时即发送对应的读寄存器指令报文,驱动器受到报文后校验数据通过返回被访问寄存器中的数据;上位机通过驱动器写数据到寄存器中即对应为发送写寄存器指令报文到驱动器,驱动器接收到指令报文校验通过后更新响应的数据到寄存器参数中;报文校验流程如图2所示;
UDP通信:UDP通信主要用于驱动器与外围设备与驱动器间的点对点通讯,数据帧报文格式为自定义的Modbus/UDP格式,指令标志位0x17,包括读写寄存器,指令报文校验流程如附图2所示,UDP报文具体格式如图3所示;
广播通信:主要用于PLC广播轮询,选择性控制同一局域网中的特定驱动器,形成自动化的物流分拣系统,数据帧报文格式为自定义的Modbus/UDP格式,指令标志包括广播写寄存器指令、广播读寄存器指令,广播通信中,PLC发送一条带有驱动器站号标识的广播报文,在同一网段内的所有驱动器均收到广播报文,只有与驱动器站号标识对应的驱动器对广播报文做出回应处理,此回应可以是驱动电机动作,或者广播回文监控信息。同时增加驱动器动作标识作为每次广播的识别标识。实际应用中,PLC在收到快件分拣系统的上下包处理信号时,可以向同一网段中的所有驱动器广播控制信号,并且选择性的控制分拣系统中需要动作的驱动器,完成相应的快件信息处理以及更新驱动器当前的动作标识,PLC可以通过驱动器站点号与驱动器动作标识去查询指令每次执行结果,这样的处理方式可以查询到每次分包指令的结果,轻易检测到系统分错快件,降低了系统的分错率,如图4所示。
本驱动器将Ethernet通信控制与传统BLDC控制驱动器相结合有效解决在上百台驱动器密集通信时传统通讯RS485容易出现通信干扰,通信速率低,接线冗杂等问题,对于单台的驱动器Ethernet控制速率远大于RS485通信,这也提高了每台驱动器对PLC的响应性。通过在广播通信中增加驱动器站点号的标识与动作次数标识,在PLC的配合控制下实现自动化、高效率、高可靠性的快件分拣。
此外,传统RS485通讯在固件升级时需要将驱动器从系统中插下,连接到主机更新,考虑到现场布线,以及驱动器安装等问题这给驱动器固件更新造成不便;本驱动器使用过程中采用Ethernet通信,驱动器更新采用基于Ethernet/TCP的自更新,结合调试上位机,实现只需要接入驱动器局域网即可完成软件的以太网自更新功能,更新流程如下:
上位机接入驱动器所在局域网连接驱动器,选择更新功能与固件更新包后开始更新,上位机主动与驱动器连接完成固件更新功能,其中自动通信更新包括如下:
上位机采用Modbus/TCP连接驱动器发送固件更新指令给驱动,驱动器接收到固件更新指令后跳转到Boot中建立TCP连接,上位机再次与驱动器连接完成握手通信,握手成功后按照双方约定的流程分包发送、校验并更新固件,固件更新完成后开始运行新固件程序。更新前可以通过修改IP连接不同的驱动器,整个过程只需一跟网线可完成对局域网所有驱动器进行更新。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种基于以太网控制的直流无刷物流分拣驱动器
- 一种基于以太网控制的直流无刷物流分拣驱动器