车辆驾驶辅助装置
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及车辆驾驶辅助装置。
背景技术
日本特开2012-131466号公报中记载有执行多种驾驶辅助控制的车辆驾驶辅助装置。在日本特开2012-131466号公报中,作为驾驶辅助控制,记载有自动进行车辆的转向(操舵)以使得车辆在车道内行驶的车道维持控制、自动进行车辆的加减速以使得车辆与前车之间的距离(即车间距离)维持在预定距离的车间距离控制、自动进行车辆的加减速以使得车辆的行驶速度维持在预定速度以下的行驶速度控制、以及自动进行车辆的加减速以使得车辆维持预定速度而行驶的定速行驶控制。
发明内容
已知一种车辆驾驶辅助装置,其具备供驾驶员在驾驶辅助控制停止后为了请求驾驶辅助控制的重启(再开始、恢复、暂停后继续)而操作的开关(以下记作“驾驶辅助重启开关”)。在这种车辆驾驶辅助装置中,由驾驶员操作了驾驶辅助重启开关时,在不考虑驾驶员的关于要使装置执行的驾驶辅助控制的意思,而采取了将与此前刚停止的驾驶辅助控制相同的驾驶辅助控制重启这一应对的情况下,有可能无法按照驾驶员的意思做出应对。
本发明是为了处理上述的问题而做出的。即,本发明的目的之一在于提供一种车辆驾驶辅助装置,其能够在驾驶辅助重启开关被操作了时采取按照驾驶员的关于要使装置执行的驾驶辅助控制的意思的应对。
本发明涉及的车辆驾驶辅助装置应用于作为自身车辆的车辆。另外,本发明涉及的车辆驾驶辅助装置具备:控制单元,其构成为能够执行加减速控制和转向控制中的至少一方作为驾驶辅助控制,所述加减速控制是自动进行所述车辆的加减速的控制,所述转向控制是自动进行所述车辆的转向的控制;以及驾驶辅助重启开关,其由所述车辆的驾驶员为了使所述控制单元停止执行的所述驾驶辅助控制重启而操作。
所述控制单元当在所述加减速控制的执行期间所述驾驶员进行了表示不希望所述加减速控制的执行的自动加减速拒绝操作的情况下,停止所述加减速控制。另外,所述控制单元当在所述转向控制的执行期间所述驾驶员进行了表示不希望所述转向控制的执行的自动转向拒绝操作的情况下,停止所述转向控制。另外,所述控制单元当在所述加减速控制的执行期间所述驾驶员进行了所述自动加减速拒绝操作以外的自动加减速停止操作的情况下,停止所述加减速控制。另外,所述控制单元当在所述转向控制的执行期间所述驾驶员进行了所述自动转向拒绝操作以外的自动转向停止操作的情况下,停止所述转向控制。
再者,所述控制单元在由于所述驾驶员进行了所述自动加减速拒绝操作而所述控制单元停止了所述加减速控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述加减速控制重启。另外,所述控制单元在由于所述驾驶员进行了所述自动转向拒绝操作而所述控制单元停止了所述转向控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述转向控制重启。
另一方面,所述控制单元在由于所述驾驶员进行了所述自动加减速停止操作而所述控制单元停止了所述加减速控制后,在所述驾驶辅助重启开关被操作了的情况下,将所述加减速控制重启。另外,所述控制单元在由于所述驾驶员进行了所述自动转向停止操作而所述控制单元停止了所述转向控制后,在所述驾驶辅助重启开关被操作了的情况下,将所述转向控制重启。
当在加减速控制的执行期间驾驶员进行了自动加减速拒绝操作的情况下,推测为驾驶员有不希望车辆的自动加减速的意思。在这样推测为驾驶员有不希望车辆的自动加减速的意思的情况下,从尊重驾驶员的意思的观点来看优选为,在加减速控制停止后,即使驾驶员操作了驾驶辅助重启开关,也不重启加减速控制。
本发明涉及的车辆驾驶辅助装置当在加减速控制的执行期间由于被进行了自动加减速拒绝操作而停止了加减速控制的情况下,判断为驾驶员有不希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启加减速控制这一应对。因此,能进行按照驾驶员的意思的应对。
同样地,当在转向控制的执行期间驾驶员进行了自动转向拒绝操作的情况下,推测为驾驶员有不希望车辆的自动转向的意思。在这样推测为驾驶员有不希望车辆的自动转向的意思的情况下,从尊重驾驶员的意思的观点来看优选为,在转向控制停止后,即使驾驶员操作了驾驶辅助重启开关,也不重启转向控制。
本发明涉及的车辆驾驶辅助装置当在转向控制的执行期间由于被进行了自动转向拒绝操作而停止了转向控制的情况下,判断为驾驶员有不希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启转向控制这一应对。因此,能进行按照驾驶员的意思的应对。
此外,在本发明涉及的车辆驾驶辅助装置还具备由所述驾驶员为了仅使所述加减速控制执行或者停止而操作的加减速辅助开关的情况下,所述自动加减速拒绝操作是在所述控制单元正在执行所述加减速控制时的由所述驾驶员对所述加减速辅助开关的操作。
当在加减速控制的执行期间驾驶员操作了加减速辅助开关的情况下,推测为驾驶员有不希望车辆的自动加减速的意思。本发明涉及的车辆驾驶辅助装置当在加减速控制的执行期间由于加减速辅助开关被进行了操作而停止了加减速控制的情况下,判断为驾驶员有不希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启加减速控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在本发明涉及的车辆驾驶辅助装置还具备由所述驾驶员为了仅使所述转向控制执行或者停止而操作的转向辅助开关的情况下,所述自动转向拒绝操作是在所述控制单元正在执行所述转向控制时的由所述驾驶员对所述转向辅助开关的操作。
当在转向控制的执行期间驾驶员操作了转向辅助开关的情况下,推测为驾驶员有不希望车辆的自动转向的意思。本发明涉及的车辆驾驶辅助装置当在转向控制的执行期间由于转向辅助开关被进行了操作而停止了转向控制的情况下,判断为驾驶员有不希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启转向控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在所述车辆具备由所述驾驶员为了使该车辆加速而操作的加速(accelerator,油门)操作件的情况下,所述自动加减速拒绝操作是在所述控制单元正在执行所述加减速控制时的由所述驾驶员对所述加速操作件的操作。
当在加减速控制的执行期间驾驶员操作了加速操作件的情况下,推测为驾驶员有不希望车辆的自动加减速的意思。本发明涉及的车辆驾驶辅助装置当在加减速控制的执行期间由于加速操作件被进行了操作而停止了加减速控制的情况下,判断为驾驶员有不希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启加减速控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在所述车辆具备由所述驾驶员为了使该车辆制动而操作的制动(brake,刹车)操作件的情况下,所述自动加减速拒绝操作是在所述控制单元正在执行所述加减速控制时的由所述驾驶员对所述制动操作件的操作。
当在加减速控制的执行期间驾驶员操作了制动操作件的情况下,推测为驾驶员有不希望车辆的自动加减速的意思。本发明涉及的车辆驾驶辅助装置当在加减速控制的执行期间由于制动操作件被进行了操作而停止了加减速控制的情况下,判断为驾驶员有不希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启加减速控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在所述车辆具备由所述驾驶员为了使该车辆转向而操作的转向操作件的情况下,所述自动转向拒绝操作是在所述控制单元正在执行所述转向控制时的由所述驾驶员对所述转向操作件的操作。
当在转向控制的执行期间驾驶员操作了转向操作件的情况下,推测为驾驶员有不希望车辆的自动转向的意思。本发明涉及的车辆驾驶辅助装置当在转向控制的执行期间由于转向操作件被进行了操作而停止了转向控制的情况下,判断为驾驶员有不希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启转向控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在本发明涉及的车辆驾驶辅助装置还具备由所述驾驶员为了使所述驾驶辅助控制执行或者停止而操作的驾驶辅助开关的情况下,所述自动加减速停止操作是在所述控制单元正在执行所述加减速控制时的由所述驾驶员对所述驾驶辅助开关的操作。
当在加减速控制的执行期间驾驶员操作了驾驶辅助开关的情况下,不一定就是驾驶员有不希望车辆的自动加减速的意思。本发明涉及的车辆驾驶辅助装置当在加减速控制的执行期间由于驾驶辅助开关被进行了操作而停止了加减速控制的情况下,判断为驾驶员有希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取将加减速控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在本发明涉及的车辆驾驶辅助装置还具备由所述驾驶员为了使所述驾驶辅助控制执行或者停止而操作的驾驶辅助开关的情况下,所述自动转向停止操作是在所述控制单元正在执行所述转向控制时的由所述驾驶员对所述驾驶辅助开关的操作。
当在转向控制的执行期间驾驶员操作了驾驶辅助开关的情况下,不一定就是驾驶员有不希望车辆的自动转向的意思。本发明涉及的车辆驾驶辅助装置当在转向控制的执行期间由于驾驶辅助开关被进行了操作而停止了转向控制的情况下,判断为驾驶员有希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取将转向控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在本发明涉及的车辆驾驶辅助装置还具备由所述驾驶员为了使所述驾驶辅助控制停止而操作的取消开关的情况下,所述自动加减速停止操作是在所述控制单元正在执行所述加减速控制时的由所述驾驶员对所述取消开关的操作。
当在驾驶辅助控制的执行期间驾驶员操作了取消开关的情况下,不一定就是驾驶员有不希望车辆的自动加减速的意思。在本发明涉及的车辆驾驶辅助装置中,自动加减速停止操作是在加减速控制的执行期间的由驾驶员对取消开关的操作。因而,本发明涉及的车辆驾驶辅助装置当在作为驾驶辅助控制而正在执行加减速控制时由于取消开关被进行了操作而停止了加减速控制的情况下,判断为驾驶员有希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取将加减速控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另外,在本发明涉及的车辆驾驶辅助装置还具备由所述驾驶员为了使所述驾驶辅助控制停止而操作的取消开关的情况下,所述自动转向停止操作是在所述控制单元正在执行所述转向控制时的由所述驾驶员对所述取消开关的操作。
当在驾驶辅助控制的执行期间驾驶员操作了取消开关的情况下,不一定就是驾驶员有不希望车辆的自动转向的意思。在本发明涉及的车辆驾驶辅助装置中,自动转向停止操作是在转向控制的执行期间的由驾驶员对取消开关的操作。因而,本发明涉及的车辆驾驶辅助装置当在作为驾驶辅助控制而正在执行转向控制时由于取消开关被进行了操作而停止了转向控制的情况下,判断为驾驶员有希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取将转向控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另外,所述控制单元也可以构成为能够执行所述加减速控制以及所述转向控制作为所述驾驶辅助控制。在该情况下,所述控制单元也可以构成为,当在所述加减速控制以及所述转向控制的执行期间所述驾驶员进行了所述自动加减速拒绝操作的情况下,停止所述加减速控制以及所述转向控制,当在所述加减速控制以及所述转向控制的执行期间所述驾驶员进行了所述自动转向拒绝操作的情况下,停止所述加减速控制以及所述转向控制。再者,在该情况下,所述控制单元也可以构成为,在由于所述驾驶员进行了所述自动加减速拒绝操作而所述控制单元停止了所述加减速控制以及所述转向控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述加减速控制重启,而将所述转向控制重启,在由于所述驾驶员进行了所述自动转向拒绝操作而所述控制单元停止了所述加减速控制以及所述转向控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述转向控制重启,而将所述加减速控制重启。
当在加减速控制以及转向控制双方的执行期间驾驶员进行了自动加减速拒绝操作的情况下,推测为驾驶员有不希望车辆的自动加减速的意思。本发明涉及的车辆驾驶辅助装置当在加减速控制以及转向控制双方的执行期间由于被进行了自动加减速拒绝操作而停止了加减速控制以及转向控制双方的情况下,判断为驾驶员有不希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取至少不重启加减速控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,当在加减速控制以及转向控制双方的执行期间驾驶员进行了自动转向拒绝操作的情况下,推测为驾驶员有不希望车辆的自动转向的意思。本发明涉及的车辆驾驶辅助装置当在加减速控制以及转向控制双方的执行期间由于被进行了自动转向拒绝操作而停止了加减速控制以及转向控制双方的情况下,判断为驾驶员有不希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取至少不重启转向控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,所述控制单元也可以构成为,当在所述加减速控制以及所述转向控制的执行期间所述驾驶员进行了所述自动加减速停止操作的情况下,停止所述加减速控制以及所述转向控制,当在所述加减速控制以及所述转向控制的执行期间所述驾驶员进行了所述自动转向停止操作的情况下,停止所述加减速控制以及所述转向控制。在该情况下,所述控制单元也可以构成为,在由于所述驾驶员进行了所述自动加减速停止操作而所述控制单元停止了所述加减速控制以及所述转向控制后,在所述驾驶辅助重启开关被操作了的情况下,将所述加减速控制以及所述转向控制重启,在由于所述驾驶员进行了所述自动转向停止操作而所述控制单元停止了所述加减速控制以及所述转向控制后,在所述驾驶辅助重启开关被操作了的情况下,将所述加减速控制以及所述转向控制重启。
另外,在本发明涉及的车辆驾驶辅助装置还具备由所述驾驶员为了使所述驾驶辅助控制执行或者停止而操作的驾驶辅助开关的情况下,所述自动加减速停止操作是在所述控制单元正在执行所述加减速控制时的由所述驾驶员对所述驾驶辅助开关的操作,所述自动转向停止操作是在所述控制单元正在执行所述转向控制时的由所述驾驶员对所述驾驶辅助开关的操作。
当在加减速控制的执行期间驾驶员操作了驾驶辅助开关的情况下,不一定就是驾驶员有不希望车辆的自动加减速的意思。另外,当在转向控制的执行期间驾驶员操作了驾驶辅助开关的情况下,不一定就是驾驶员有不希望车辆的自动转向的意思。在本发明涉及的车辆驾驶辅助装置中,自动加减速停止操作是在加减速控制的执行期间的由驾驶员对驾驶辅助开关的操作,自动转向停止操作是在转向控制的执行期间的由驾驶员对驾驶辅助开关的操作。因而,本发明涉及的车辆驾驶辅助装置当在加减速控制的执行期间由于驾驶辅助开关被进行了操作而停止了加减速控制的情况下,判断为驾驶员有希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取将加减速控制重启这一应对。另外,本发明涉及的车辆驾驶辅助装置当在转向控制的执行期间由于驾驶辅助开关被进行了操作而停止了转向控制的情况下,判断为驾驶员有希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取将转向控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另外,所述控制单元也可以构成为能够执行脱手(hands-free,解放双手)控制作为所述驾驶辅助控制,所述脱手控制是包括所述加减速控制以及所述转向控制双方的控制,容许所述驾驶员将手离开用于使所述车辆转向的转向操作件。在该情况下,所述控制单元也可以构成为,当在所述脱手控制的执行期间所述驾驶员进行了所述自动加减速拒绝操作的情况下,停止所述脱手控制,当在所述脱手控制的执行期间所述驾驶员进行了所述自动转向拒绝操作的情况下,停止所述脱手控制。再者,在该情况下,所述控制单元也可以构成为,在由于所述驾驶员进行了所述自动加减速拒绝操作而所述控制单元停止了所述脱手控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述脱手控制重启,在由于所述驾驶员进行了所述自动转向拒绝操作而所述控制单元停止了所述脱手控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述脱手控制重启。
当在脱手控制的执行期间驾驶员进行了自动加减速拒绝操作的情况下,推测为驾驶员有不希望车辆的自动加减速的意思。本发明涉及的车辆驾驶辅助装置当在脱手控制的执行期间由于被进行了自动加减速拒绝操作而停止了脱手控制的情况下,判断为驾驶员有不希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启脱手控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,当在脱手控制的执行期间驾驶员进行了自动转向拒绝操作的情况下,推测为驾驶员有不希望车辆的自动转向的意思。本发明涉及的车辆驾驶辅助装置当在脱手控制的执行期间由于被进行了自动转向拒绝操作而停止了脱手控制的情况下,判断为驾驶员有不希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不重启脱手控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,所述控制单元也可以构成为,在由于所述驾驶员进行了所述自动加减速拒绝操作而所述控制单元停止了所述脱手控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述脱手控制重启,而执行所述转向控制,在由于所述驾驶员进行了所述自动转向拒绝操作而所述控制单元停止了所述脱手控制后,在所述驾驶辅助重启开关被操作了的情况下,不使所述脱手控制重启,而执行所述加减速控制。
当在脱手控制的执行期间驾驶员进行了自动加减速拒绝操作的情况下,推测为驾驶员有不希望车辆的自动加减速的意思。本发明涉及的车辆驾驶辅助装置当在脱手控制的执行期间由于被进行了自动加减速拒绝操作而停止了脱手控制的情况下,判断为驾驶员有不希望车辆的自动加减速的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不使脱手控制重启而仅执行转向控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,当在脱手控制的执行期间驾驶员进行了自动转向拒绝操作的情况下,推测为驾驶员有不希望车辆的自动转向的意思。本发明涉及的车辆驾驶辅助装置当在脱手控制的执行期间由于被进行了自动转向拒绝操作而停止了脱手控制的情况下,判断为驾驶员有不希望车辆的自动转向的意思,之后,在驾驶辅助重启开关被操作了的情况下,采取不使脱手控制重启而仅执行加减速控制这一应对。因此,能进行按照驾驶员的意思的应对。
本发明的各构成要素并非限定于参照以下的附图所记述的实施方式。本发明的其他目的、其他特征以及附带的优点可根据参照以下的附图所记述的关于本发明的实施方式的说明而容易地理解。
附图说明
图1是示出本发明的实施方式涉及的车辆驾驶辅助装置以及该车辆驾驶辅助装置被应用的车辆的图。
图2的(A)和(B)分别是用于说明在车间距离控制被停止后驾驶辅助重启开关被进行了操作时的车辆驾驶辅助装置的工作的图。
图3的(A)和(B)分别是用于说明在车道维持控制被停止后驾驶辅助重启开关被进行了操作时的车辆驾驶辅助装置的工作的图。
图4是用于说明在脱手控制被停止后驾驶辅助重启开关被进行了操作时的车辆驾驶辅助装置的工作的图。
图5是用于说明在脱手控制被停止后驾驶辅助重启开关被进行了操作时的车辆驾驶辅助装置的工作的图。
图6是用于说明在脱手控制被停止后驾驶辅助重启开关被进行了操作时的车辆驾驶辅助装置的工作的图。
图7是示出图1所示的ECU的CPU执行的例程(routine)的流程图。
图8是示出图1所示的ECU的CPU执行的例程的流程图。
图9是示出图1所示的ECU的CPU执行的例程的流程图。
标号说明
81第1驾驶辅助开关;82第2驾驶辅助开关;83驾驶辅助重启开关;84取消开关;85加减速辅助开关;86转向辅助开关;90ECU(电子控制单元);100车辆。
具体实施方式
以下,参照附图,对本发明的实施方式涉及的车辆驾驶辅助装置进行说明。图1示出了本发明的实施方式涉及的车辆驾驶辅助装置10以及该车辆驾驶辅助装置10被应用的车辆100。
如图1所示,车辆驾驶辅助装置10具备ECU90。ECU是电子控制单元(ElectronicControl Unit)的简称。ECU90具备微型计算机(microcomputer)作为主要部分。微型计算机包括CPU、ROM、RAM、非易失性存储器以及接口(interface)等。CPU通过执行存储于ROM的指令(instruction)、程序或例程,实现各种功能。
车辆100上搭载有车辆驱动力产生装置20、制动装置30以及转向装置40。车辆驱动力产生装置20是用于产生用于使车辆100行驶的驱动力并对车辆100的驱动轮施加该驱动力的装置。车辆驱动力产生装置20例如是内燃机、电动马达等。制动装置30是用于对车辆100的车轮施加用于使车辆100制动的制动力的装置。转向装置40是用于对车辆100的舵轮施加用于使车辆100转向的转向扭矩(力矩)的装置。
车辆驱动力产生装置20、制动装置30以及转向装置40与ECU90电连接。ECU90通过控制车辆驱动力产生装置20的工作来控制被施加到车辆100的驱动轮的驱动力。另外,ECU90通过控制制动装置30的工作来控制被施加到车辆100的车轮的制动力。另外,ECU90通过控制转向装置40的工作来控制被施加到车辆100的舵轮的转向扭矩。
<传感器等>
车辆驾驶辅助装置10具备加速踏板操作量传感器61、制动踏板操作量传感器62、转向角(方向盘转角)传感器63、转向扭矩传感器64、轮速传感器65、偏航率传感器66、前后加速度传感器67、横向加速度传感器68、换挡(挡位)传感器69、车门传感器70、安全带传感器71、雷达传感器装置72以及摄像装置73。
加速踏板操作量传感器61与ECU90电连接。加速踏板操作量传感器61检测车辆100的驾驶员对加速踏板51的操作量AP,将表示检测出的操作量AP的信号S61发送给ECU90。ECU90基于信号S61取得加速踏板51的操作量AP作为加速踏板操作量AP。再者,ECU90控制车辆驱动力产生装置20的工作以使得与加速踏板操作量AP相应的驱动力从车辆驱动力产生装置20施加到车辆100的驱动轮。加速踏板51是由驾驶员为了使车辆100加速而操作的加速操作件的一个形式。
制动踏板操作量传感器62与ECU90电连接。制动踏板操作量传感器62检测驾驶员对制动踏板52的操作量BP,将表示检测出的操作量BP的信号S62发送给ECU90。ECU90基于信号S62取得制动踏板52的操作量BP作为制动踏板操作量BP。再者,ECU90控制制动装置30的工作以使得与制动踏板操作量BP相应地制动力从制动装置30施加到车辆100的车轮。制动踏板52是由驾驶员为了使车辆100制动而操作的制动操作件的一个形式。
转向角传感器63与ECU90电连接。转向角传感器63检测相对于中立位置(空挡)的方向盘53的旋转角度θst,将表示检测出的旋转角度θst的信号S63发送给ECU90。ECU90基于信号S63取得相对于中立位置的方向盘53的旋转角度θst作为“转向角θst”。方向盘53是由驾驶员为了使车辆100转向而操作的转向操作件的一个形式。
转向扭矩传感器64与ECU90电连接。转向扭矩传感器64检测由驾驶员输入到转向轴54的扭矩TQst,将表示检测出的扭矩TQst的信号S64发送给ECU90。ECU90基于信号S64取得由驾驶员输入到转向轴54的扭矩TQst作为“转向扭矩TQst”。
ECU90控制转向装置40的工作以使与取得的转向角θst以及转向扭矩TQst相应的转向扭矩施加到车辆100的舵轮。
轮速传感器65与ECU90电连接。轮速传感器65检测车辆100的各车轮的转速Vrot,将表示检测出的转速Vrot的信号S65发送给ECU90。ECU90基于信号S65取得各车轮的转速Vrot。进而,ECU90基于取得的各车轮的转速Vrot,取得车辆100的行驶速度SPD。
偏航率传感器66与ECU90电连接。偏航率传感器66检测车辆100的偏航率YR,将表示检测出的偏航率YR的信号S66发送给ECU90。ECU90基于信号S66取得车辆100的偏航率YR。
前后加速度传感器67与ECU90电连接。前后加速度传感器67检测车辆100的前后加速度Gx,将表示检测出的前后加速度Gx的信号S67发送给ECU90。ECU90基于信号S67取得车辆100的前后加速度Gx。
横向加速度传感器68与ECU90电连接。横向加速度传感器68检测车辆100的横向加速度Gy,将表示检测出的横向加速度Gy的信号S68发送给ECU90。ECU90基于信号S68取得车辆100的横向加速度Gy。
换挡传感器69与ECU90电连接。换挡传感器69检测车辆100的换挡杆(图略)的位置,将表示其检测出的位置的信号S69发送给ECU90。ECU90基于信号S69取得车辆100的换挡杆的位置。换挡杆能够设定在中立位置(或者N挡)、前进位置(或者D挡)、后退位置(或者R挡)以及锁定(lock)位置(或者P挡)中的任一方。在换挡杆被设定于中立位置的情况下,驱动力不被传递到车轮。在换挡杆被设定于前进位置的情况下,驱动力被传递到车轮以使车辆100前进。在换挡杆被设定于后退位置的情况下,驱动力被传递到车轮以使车辆100后退。在换挡杆被设定于锁定位置的情况下,车轮被锁定。
车门传感器70与ECU90电连接。车门传感器70在车辆100的门(图略)被打开时将低电平(low level)信号S70L发送给ECU90,在车辆100的门被关闭时将高电平(high level)信号S70H发送给ECU90。ECU90在接收到低电平信号S70L的情况下,判断为车辆100的门被打开,在接收到高电平信号S70H的情况下,判断为车辆100的门被关闭。
安全带传感器71与ECU90电连接。安全带传感器71在车辆100的安全带(图略)被系上时将高电平信号S71H发送给ECU90,在安全带被解开时将低电平信号S71L发送给ECU90。ECU90在接收到高电平信号S71H的情况下,判断为安全带被系上,在接收到低电平信号S71L的情况下,判断为安全带被解开。
雷达传感器装置72具备以下的雷达传感器。
(1)向车辆100的前方发射毫米波的雷达传感器。
(2)向车辆100的左前方发射毫米波的雷达传感器。
(3)向车辆100的右前方发射毫米波的雷达传感器。
(4)向车辆100的左侧方发射毫米波的雷达传感器。
(5)向车辆100的右侧方发射毫米波的雷达传感器。
(6)向车辆100的左后方发射毫米波的雷达传感器。
(7)向车辆100的右后方发射毫米波的雷达传感器。
这些雷达传感器接收由物体反射的毫米波。
雷达传感器装置72与ECU90电连接。雷达传感器装置72将表示与“各雷达传感器发射出的毫米波”以及“各雷达传感器接收到的毫米波”等有关的信息的信号发送给ECU90。ECU90基于从雷达传感器装置72接收到的信号,取得与存在于车辆100周围的物体有关的信息作为物体信息Iobj。物体信息Iobj中包含有与车辆100和物体之间的距离有关的信息。
摄像装置73包括对车辆100前方的风景进行拍摄的摄像头(camera)。摄像装置73与ECU90电连接。摄像装置73将表示与通过摄像头拍摄到的风景的图像有关的信息的信号S73发送给ECU90。ECU90基于信号S73取得与车辆100前方的状况有关的信息作为图像信息Iimg。
<各种开关>
再者,车辆驾驶辅助装置10具备驾驶辅助设定装置80。驾驶辅助设定装置80具备第1驾驶辅助开关81、第2驾驶辅助开关82、驾驶辅助重启开关83、取消开关84、加减速辅助开关85以及转向辅助开关86。驾驶辅助设定装置80配设在车辆100的驾驶员能一边握着方向盘53一边用手指操作的地方(例如,将喇叭垫(horn pad)支承于方向盘53的支架(stay))。
第1驾驶辅助开关81与ECU90电连接。第1驾驶辅助开关81在由驾驶员进行了操作时将操作信号S81发送给ECU90。ECU90在接收到操作信号S81时,判断为第1驾驶辅助开关81被进行了操作。第1驾驶辅助开关81是用于让驾驶员选择是否执行后述的驾驶辅助控制的开关的一个形式。
第2驾驶辅助开关82与ECU90电连接。第2驾驶辅助开关82在由驾驶员进行了操作时将操作信号S82发送给ECU90。ECU90在接收到操作信号S82时,判断为第2驾驶辅助开关82被进行了操作。第2驾驶辅助开关82是用于让驾驶员选择是否执行后述的驾驶辅助控制的开关的一个形式。
驾驶辅助重启开关83与ECU90电连接。驾驶辅助重启开关83在由驾驶员进行了操作时将操作信号S83发送给ECU90。ECU90在接收到操作信号S83时,判断为驾驶辅助重启开关83被进行了操作。驾驶辅助重启开关83是用于让驾驶员在驾驶辅助控制被停止后选择是否使驾驶辅助控制重启的开关的一个形式。
取消开关84与ECU90电连接。取消开关84在由驾驶员进行了操作时将操作信号S84发送给ECU90。ECU90在接收到操作信号S84时,判断为取消开关84被进行了操作。取消开关84是用于让驾驶员选择是否使驾驶辅助控制停止的开关的一个形式。
加减速辅助开关85与ECU90电连接。加减速辅助开关85在由驾驶员进行了操作时将操作信号S85发送给ECU90。ECU90在接收到操作信号S85时,判断为加减速辅助开关85被进行了操作。加减速辅助开关85是用于让驾驶员选择是仅执行后述的车间距离控制还是仅停止该车间距离控制的开关的一个形式。
转向辅助开关86与ECU90电连接。转向辅助开关86在由驾驶员进行了操作时将操作信号S86发送给ECU90。ECU90在接收到操作信号S86时,判断为转向辅助开关86被进行了操作。转向辅助开关86是用于让驾驶员选择是仅执行后述的车道维持控制还是仅停止该车道维持控制的开关的一个形式。
自动制动开关87配设(配置设置)在车辆100的驾驶员可操作的地方(位置)。自动制动开关87与ECU90电连接。自动制动开关87在被设定于导通(ON)位置的情况下,将导通信号Son发送给ECU90。另一方面,自动制动开关87在被设定于截止(OFF)位置的情况下,将截止信号Soff发送给ECU90。ECU90在接收到导通信号Son的情况下,判断为自动制动开关87被设定于导通位置,在接收到截止信号Soff的情况下,判断为自动制动开关87被设定于截止位置。
<其他构成要素>
再者,车辆驾驶辅助装置10具备GPS接收机74、地图数据库75以及显示器76。
GPS接收机74与ECU90电连接。GPS接收机74接收GPS信号S74,将接收到的GPS信号S74发送给ECU90。ECU90基于GPS信号S74取得车辆100的当前位置Pnow。
地图数据库75与ECU90电连接。地图数据库75中存储有地图信息Imap。在本例中,地图信息Imap中包含有“与道路有关的信息”以及“管制行驶速度等与交通管制有关的信息”等。ECU90能够从地图数据库75取得地图信息Imap。
显示器76配设在车辆100的驾驶员可视觉识别的地方。显示器76与ECU90电连接。ECU90能够使显示器76显示各种图像。
例如,ECU90能够使显示器76显示用于设定通过后述的脱手控制而使车辆100自动到达的地点(以下记作“目的地”)的图像。驾驶员能够通过操作该图像来设定上述目的地。另外,ECU90能够使显示器76显示用于设定通过后述的车间距离控制来维持的车辆100和前车之间的距离Dinter的图像。驾驶员能够通过操作该图像来将上述距离Dinter设定为“设定距离Dset”。另外,ECU90能够使显示器76显示用于设定通过后述的车间距离控制来维持的车辆100的行驶速度SPD的图像。驾驶员能够通过操作该图像来将上述行驶速度SPD设定为“设定速度SPDset”。
<车辆驾驶辅助装置的工作的概要>
车辆驾驶辅助装置10构成为能够执行多个驾驶辅助控制。在本例中,多个驾驶辅助控制是车间距离控制、车道维持控制、脱手控制、车身稳定控制(防侧滑控制)以及自动制动控制。
<车间距离控制>
车间距离控制是自动进行车辆100的加减速以使得即使驾驶员没有进行加速踏板51的操作以及制动踏板52的操作、车辆100和前车之间的距离Dinter也维持在设定距离Dset的控制。另外,在不存在前车的情况下,车间距离控制也是自动进行车辆100的加减速以使得车辆100的行驶速度SPD维持在设定速度SPDset的控制。因而,车间距离控制是自动进行车辆100的加减速的加减速控制中的一个。
另外,车间距离控制不是自动进行车辆100的转向的控制,因此是不容许驾驶员将手离开方向盘53的状态的控制。因而,车间距离控制是不容许驾驶员将手离开用于使车辆100转向的转向操作件(在本例中为方向盘53)的状态的非脱手控制中的一个。
车辆驾驶辅助装置10在车间距离控制执行条件Cacc_start成立的情况下,执行车间距离控制。车间距离控制执行条件Cacc_start在以下的“执行条件Cacc_start_1和执行条件Cacc_start_2”中的任一个成立时成立。
(1)执行条件Cacc_start_1:在没有执行任何驾驶辅助控制时第1驾驶辅助开关81被进行了操作并且脱手控制执行条件Cads_start不成立。
(2)执行条件Cacc_start_2:在没有执行任何驾驶辅助控制时第2驾驶辅助开关82被进行了操作。
此外,车辆驾驶辅助装置10也可以构成为能够执行定速控制以取代车间距离控制。定速控制是自动控制车辆100的加减速以使得车辆100的行驶速度SPD自动维持在设定速度SPDset的控制。因而,定速控制是自动进行车辆100的加减速的加减速控制中的一个。
另外,定速控制不是自动进行车辆100的转向的控制,因此是不容许驾驶员将手离开方向盘53的状态的控制。因而,定速控制是不容许驾驶员将手离开用于使车辆100转向的转向操作件(在本例中为方向盘53)的状态的非脱手控制中的一个。
车辆驾驶辅助装置10在定速控制执行条件Ccc_start成立的情况下,执行定速控制。定速控制执行条件Ccc_start在上述的“执行条件Cacc_start_1和执行条件Cacc_start_2”中的任一个成立时成立。
<车道维持控制>
车道维持控制是自动进行车辆100的转向以使得即使驾驶员不进行方向盘53的操作、车辆100也在车道内行驶的控制。因而,车道维持控制是自动进行车辆100的转向的转向控制中的一个。
另外,车道维持控制虽然是无需由驾驶员对方向盘53进行操作的控制,但并不是容许驾驶员将手离开方向盘53的状态的控制。因而,车道维持控制是不容许驾驶员将手离开用于使车辆100转向的转向操作件(在本例中为方向盘53)的状态的非脱手控制中的一个。
车辆驾驶辅助装置10在车道维持控制执行条件Clta_start成立的情况下,执行车道维持控制。车道维持控制执行条件Clta_start在以下的“执行条件Clta_start_1至执行条件Clta_start_4”中的任一个成立时成立。
(1)执行条件Clta_start_1:在没有执行任何驾驶辅助控制时第1驾驶辅助开关81被进行了操作并且后述的脱手控制执行条件Cads_start不成立。
(2)执行条件Clta_start_2:在没有执行任何驾驶辅助控制时第2驾驶辅助开关82被进行了操作。
(3)执行条件Clta_start_3:在没有执行任何驾驶辅助控制时转向辅助开关86被进行了操作。
(4)执行条件Clta_start_4:在正在执行车间距离控制时转向辅助开关86被进行了操作并且后述的脱手控制执行条件Cads_start不成立。
根据以上说明可知,在本例中,在上述的“车间距离控制执行条件Cacc_start和车道维持控制执行条件Clta_start”双方都成立的情况下,车辆驾驶辅助装置10执行车间距离控制和车道维持控制双方。
<脱手控制>
脱手控制是自动进行车辆100的加减速以及转向以使得即使驾驶员不进行加速踏板51的操作、制动踏板52的操作以及方向盘53的操作并且在驾驶员将手离开方向盘53的状态、车辆100也安全地行驶到目的地的控制。因而,脱手控制是包括加减速控制和转向控制双方的脱手控制,是容许驾驶员将手离开用于使车辆100转向的转向操作件(在本例中为方向盘53)的脱手控制中的一个。
车辆驾驶辅助装置10在脱手控制执行条件Cads_start成立的情况下,执行脱手控制。脱手控制执行条件Cads_start在以下的“执行条件Cads_start_1至执行条件Cads_start_3”全部成立时成立。
(1)执行条件Cads_start_1:与包含到目的地的行驶路线的地域对应的地图信息Imap的精度比预定等级高。
(2)执行条件Cads_start_2:与车辆100的当前位置Pnow有关的信息的精度比预定等级高。
(3)执行条件Cads_start_3:在没有执行任何驾驶辅助控制时第1驾驶辅助开关81被进行了操作。
另外,脱手控制执行条件Cads_start在以下的切换条件Cads_change_1成立时也成立。
(1)切换条件Cads_change_1:在上述执行条件Cads_start_3成立时由于上述的“执行条件Cads_start_1和执行条件Cads_start_2”中的某一个不成立而执行了车间距离控制和车道维持控制后,上述的“执行条件Cads_start_1和执行条件Cads_start_2”双方都成立。
<车身稳定控制>
车身稳定控制是防止车辆100侧滑的控制。车辆驾驶辅助装置10在车身稳定控制执行条件Cvsc_start成立时执行车身稳定控制。车身稳定控制执行条件Cvsc_start在以下的执行条件Cvsc_start_1成立时成立。
(1)执行条件Cvsc_start_1:车辆100产生了侧滑。
此外,车辆驾驶辅助装置10基于各车轮的转速Vrot、车辆100的行驶速度SPD、各车轮的转向角、横向加速度Gy以及偏航率YR,判断车辆100是否发生了侧滑。
<自动制动控制>
自动制动控制是防止车辆100与物体相撞的控制。车辆驾驶辅助装置10在自动制动控制执行条件Cpcs_start成立时执行自动制动控制。自动制动控制执行条件Cpcs_start在以下的“执行条件Cpcs_start_1和执行条件Cpcs_start_2”双方都成立时成立。
(1)执行条件Cpcs_start_1:自动制动开关87被设定于导通位置。
(2)执行条件Cpcs_start_2:车辆100到达物体处为止的时间在阈值时间以下。
<车间距离控制的停止>
车辆驾驶辅助装置10在车间距离控制停止条件Cacc_stop成立的情况下,停止车间距离控制。车间距离控制停止条件Cacc_stop在以下的“停止条件Cacc_stop_1至停止条件Cacc_stop_4”中的任一个成立时成立。
(1)停止条件Cacc_stop_1:在车间距离控制的执行期间,“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作。
(2)停止条件Cacc_stop_2:在车间距离控制的执行期间,加减速辅助开关85被进行了操作。
(3)停止条件Cacc_stop_3:在车间距离控制的执行期间,以下的“加减速操作条件Caccel_1和加减速操作条件Caccel_2”中的任一个成立。
(4)停止条件Cacc_stop_4:在车间距离控制的执行期间,以下的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立。
(1)加减速操作条件Caccel_1:加速踏板操作量AP成为了预定操作量APth以上。
(2)加减速操作条件Caccel_2:制动踏板操作量BP成为了预定操作量BPth以上。
(1)追加条件Cadd_1:换挡杆设定在了前进位置以外的位置。
(2)追加条件Cadd_2:车辆100的门打开了。
(3)追加条件Cadd_3:车辆100的安全带解开了。
(4)追加条件Cadd_4:车身稳定控制开始了。
(5)追加条件Cadd_5:自动制动开关87设定在了截止位置。
(6)追加条件Cadd_6:自动制动控制被执行了。
此外,车辆驾驶辅助装置10在构成为能够执行定速控制的情况下,在定速控制停止条件Ccc_stop成立时停止定速控制。定速控制停止条件Ccc_stop在以下的“停止条件Ccc_stop_1至停止条件Ccc_stop_4”中的任一个成立时成立。
(1)停止条件Ccc_stop_1:在定速控制的执行期间,“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作。
(2)停止条件Ccc_stop_2:在定速控制的执行期间,加减速辅助开关85被进行了操作。
(3)停止条件Ccc_stop_3:在定速控制的执行期间,上述的“加减速操作条件Caccel_1和加减速操作条件Caccel_2”中的任一个成立。
(4)停止条件Ccc_stop_4:在定速控制的执行期间,上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立。
<车道维持控制的停止>
车辆驾驶辅助装置10在车道维持控制停止条件Clta_stop成立的情况下,停止车道维持控制。车道维持控制停止条件Clta_stop在以下的“停止条件Clta_stop_1至停止条件Clta_stop_4”中的任一个成立时成立。
(1)停止条件Clta_stop_1:在车道维持控制的执行期间,“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作。
(2)停止条件Clta_stop_2:在车道维持控制的执行期间,转向辅助开关86被进行了操作。
(3)停止条件Clta_stop_3:在车道维持控制的执行期间,以下的“转向操作条件Cst_1和转向操作条件Cst_2”中的任一个成立。
(4)停止条件Clta_stop_4:在车道维持控制的执行期间,上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立。
(1)转向操作条件Cst_1:在车道维持控制的执行期间,转向角θst成为了预定转向角θst_th以上。
(2)转向操作条件Cst_2:在车道维持控制的执行期间,转向扭矩TQst成为了预定转向扭矩TQst_th以上。
<脱手控制的停止>
车辆驾驶辅助装置10在脱手控制停止条件Cads_stop成立的情况下,停止脱手控制。在该情况下,车辆驾驶辅助装置10在将脱手控制停止后,既不执行车间距离控制,也不执行车道维持控制。脱手控制停止条件Cads_stop在以下的“停止条件Cads_stop_1至停止条件Cads_stop_6”中的任一个成立时成立。
(1)停止条件Cads_stop_1:在脱手控制的执行期间,“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作。
(2)停止条件Cads_stop_2:在脱手控制的执行期间,转向辅助开关86被进行了操作。
(3)停止条件Cads_stop_3:在脱手控制的执行期间,上述的“转向操作条件Cst_1和转向操作条件Cst_2”中的任一个成立。
(4)停止条件Cads_stop_4:在脱手控制的执行期间,加减速辅助开关85被进行了操作。
(5)停止条件Cads_stop_5:在脱手控制的执行期间,上述的“加减速操作条件Caccel_1和加减速操作条件Caccel_2”中的任一个成立。
(6)停止条件Cads_stop_6:在脱手控制的执行期间,上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立。
<向车间距离控制的切换>
车辆驾驶辅助装置10在车间距离控制切换条件Cacc_change成立的情况下,停止脱手控制,并执行车间距离控制。车间距离控制切换条件Cacc_change在以下的“切换条件Cacc_change_1和切换条件Cacc_change_2”中的任一个成立时成立。
(1)切换条件Cacc_change_1:在脱手控制的执行期间,与车辆100的当前位置Pnow有关的信息的精度变为低于预定等级。
(2)切换条件Cacc_change_2:在脱手控制的执行期间,与车辆100所行驶的地域对应的地图信息Imap的精度变为低于预定等级。此外,在地图数据库75中没有存储与车辆100所行驶的地域对应的地图信息Imap的情况下,也判断为与车辆100所行驶的地域对应的地图信息Imap的精度变为低于预定等级。
此外,车辆驾驶辅助装置10在构成为能够执行定速控制的情况下,在定速控制切换条件Ccc_change成立时停止脱手控制,并执行定速控制。定速控制切换条件Ccc_change在分别与上述的“切换条件Cacc_change_1和切换条件Cacc_change_2”相同的“切换条件Ccc_change_1和切换条件Ccc_change_2”中的任一个成立时成立。
<向车道维持控制的切换>
另外,车辆驾驶辅助装置10在车道维持控制切换条件Clta_change成立的情况下,停止脱手控制,并执行车道维持控制。车道维持控制切换条件Clta_change在以下的“切换条件Clta_change_1和切换条件Clta_change_2”中的任一个成立时成立。
(1)切换条件Clta_change_1:在脱手控制的执行期间,与车辆100的当前位置Pnow有关的信息的精度变为低于预定等级。
(2)切换条件Clta_change_2:在脱手控制的执行期间,与车辆100所行驶的地域对应的地图信息Imap的精度变为低于预定等级。此外,在地图数据库75中没有存储与车辆100所行驶的地域对应的地图信息Imap的情况下,也判断为与车辆100所行驶的地域对应的地图信息Imap的精度变为低于预定等级。
此外,上述切换条件Cacc_change_1和上述切换条件Clta_change_1是相同的条件。因而,车辆驾驶辅助装置10当在脱手控制的执行期间与车辆100的当前位置Pnow有关的信息的精度变为低于预定等级的情况下,停止脱手控制,并执行车间距离控制以及车道维持控制双方。
同样地,上述切换条件Cacc_change_2和上述切换条件Clta_change_2是相同的条件。因而,车辆驾驶辅助装置10当在脱手控制的执行期间与车辆100所行驶的地域对应的地图信息Imap的精度变为低于预定等级的情况下,停止脱手控制,并执行车间距离控制以及车道维持控制双方。
<车间距离控制的重启>
可是,当在车间距离控制的执行期间驾驶员操作了加减速辅助开关85的情况下,推测为驾驶员有不希望车辆100的自动加减速的意思。另外,当在车间距离控制的执行期间驾驶员将加速踏板51较大幅地踩下的情况下,也推测为驾驶员有不希望车辆100的自动加减速的意思。另外,当在车间距离控制的执行期间驾驶员将制动踏板52较大幅地踩下的情况下,也推测为驾驶员有不希望车辆100的自动加减速的意思。在这样推测为驾驶员有不希望车辆100的自动加减速的意思的情况下,从尊重驾驶员的意思的观点来看优选为,在车间距离控制停止后,即使驾驶员操作了驾驶辅助重启开关83,也不重启车间距离控制。
于是,车辆驾驶辅助装置10在车间距离控制重启条件Cacc_restart成立的情况下,将车间距离控制重启。车间距离控制重启条件Cacc_restart在以下的“重启条件Cacc_restart_1至重启条件Cacc_restart_4”中的任一个成立时成立。
(1)重启条件Cacc_restart_1:在车间距离控制的执行期间由于“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作而车间距离控制被停止后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(2)重启条件Cacc_restart_2:在车间距离控制的执行期间由于上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立而停止了车间距离控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(3)重启条件Cacc_restart_3:在脱手控制的执行期间由于转向辅助开关86被进行了操作而停止了车间距离控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(4)重启条件Cacc_restart_4:在脱手控制的执行期间由于上述的“转向操作条件Cst_1和转向操作条件Cst_2”中的任一个成立而停止了车间距离控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
如图2的(A)所示,根据车辆驾驶辅助装置10,当在车间距离控制的执行期间在第1驾驶辅助开关81被进行了操作的时间点t20车间距离控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点t21,车间距离控制被重启。即,车辆驾驶辅助装置10当在车间距离控制的执行期间由于第1驾驶辅助开关81被进行了操作而停止了车间距离控制的情况下,判断为驾驶员有希望车辆100的自动加减速的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取将车间距离控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另一方面,如图2的(B)所示,当在车间距离控制的执行期间在加减速辅助开关85被进行了操作的时间点t22车间距离控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点t23,车间距离控制不被重启。即,车辆驾驶辅助装置10当在车间距离控制的执行期间由于加减速辅助开关85被进行了操作而停止了车间距离控制的情况下,判断为驾驶员有不希望车辆100的自动加减速的意思。同样地,车辆驾驶辅助装置10当在车间距离控制的执行期间由于上述的“加减速操作条件Caccel_1和加减速操作条件Caccel_2”中的任一个成立而停止了车间距离控制的情况下,也判断为驾驶员有不希望车辆100的自动加减速的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取不重启车间距离控制这一应对。因此,能进行按照驾驶员的意思的应对。
此外,车辆驾驶辅助装置10也可以构成为,在上述重启条件Cacc_restart_2成立的情况下,不重启车间距离控制。
另外,车辆驾驶辅助装置10在构成为能够执行定速控制的情况下,在定速控制重启条件Ccc_restart成立时将定速控制重启。定速控制重启条件Ccc_restart在以下的“重启条件Ccc_restart_1至重启条件Ccc_restart_4”中的任一个成立时成立。
(1)重启条件Ccc_restart_1:在定速控制的执行期间由于“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作而定速控制被停止后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(2)重启条件Ccc_restart_2:在定速控制的执行期间由于上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立而停止了定速控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(3)重启条件Ccc_restart_3:在脱手控制的执行期间由于转向辅助开关86被进行了操作而停止了定速控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(4)重启条件Ccc_restart_4:在脱手控制的执行期间由于上述的“转向操作条件Cst_1和转向操作条件Cst_2”中的任一个成立而停止了定速控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
根据车辆驾驶辅助装置10,当在定速控制的执行期间在第1驾驶辅助开关81被进行了操作的时间点定速控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点,定速控制被重启。即,车辆驾驶辅助装置10当在定速控制的执行期间由于第1驾驶辅助开关81被进行了操作而停止了定速控制的情况下,判断为驾驶员有希望车辆100的自动加减速的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取将定速控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另一方面,当在定速控制的执行期间在加减速辅助开关85被进行了操作的时间点定速控制被停止了的情况下,之后,在驾驶辅助重启开关83被进行了操作的时间点定速控制不被重启。即,车辆驾驶辅助装置10当在定速控制的执行期间由于加减速辅助开关85被进行了操作而停止了定速控制的情况下,判断为驾驶员有不希望车辆100的自动加减速的意思。同样地,车辆驾驶辅助装置10当在定速控制的执行期间由于上述的“加减速操作条件Caccel_1和加减速操作条件Caccel_2”中的任一个成立而停止了定速控制的情况下,也判断为驾驶员有不希望车辆100的自动加减速的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取不重启定速控制这一应对。因此,能进行按照驾驶员的意思的应对。
此外,车辆驾驶辅助装置10也可以构成为,在上述重启条件Ccc_restart_2成立的情况下,不重启定速控制。
<车道维持控制的重启>
另外,当在车道维持控制的执行期间驾驶员操作了转向辅助开关86的情况下,推测为驾驶员有不希望车辆100的自动转向的意思。另外,当在车道维持控制的执行期间驾驶员将方向盘53较大幅地进行了操作的情况下,也推测为驾驶员有不希望车辆100的自动转向的意思。在这样推测为驾驶员有不希望车辆100的自动转向的意思的情况下,从尊重驾驶员的意思的观点来看优选为,在车道维持控制停止后,即使驾驶员操作了驾驶辅助重启开关83,也不重启车道维持控制。
于是,车辆驾驶辅助装置10在车道维持控制重启条件Clta_restart成立的情况下,将车道维持控制重启。车道维持控制重启条件Clta_restart在以下的“重启条件Clta_restart_1至重启条件Clta_restart_4”中的任一个成立时成立。
(1)重启条件Clta_restart_1:在车道维持控制的执行期间由于“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作而车道维持控制被停止后,在任何驾驶辅助控制被开始前驾驶辅助重启开关83被进行了操作。
(2)重启条件Clta_restart_2:在车道维持控制的执行期间由于上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立而停止了车道维持控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(3)重启条件Clta_restart_3:在脱手控制的执行期间由于加减速辅助开关85被进行了操作而停止了车道维持控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
(4)重启条件Clta_restart_4:在脱手控制的执行期间由于上述的“加减速操作条件Caccel_1和加减速操作条件Caccel_2”中的任一个成立而停止了车道维持控制后,在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作。
如图3的(A)所示,根据车辆驾驶辅助装置10,当在车道维持控制的执行期间在第1驾驶辅助开关81被进行了操作的时间点t30车道维持控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点t31,车道维持控制被重启。即,车辆驾驶辅助装置10当在车道维持控制的执行期间由于第1驾驶辅助开关81被进行了操作而停止了车道维持控制的情况下,判断为驾驶员有希望车辆100的自动转向的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取将车道维持控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另一方面,如图3的(B)所示,当在车道维持控制的执行期间在转向辅助开关86被进行了操作的时间点t32车道维持控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点t33,车道维持控制不被重启。即,车辆驾驶辅助装置10当在车道维持控制的执行期间由于转向辅助开关86被进行了操作而停止了车道维持控制的情况下,判断为驾驶员有不希望车辆100的自动转向的意思。同样地,车辆驾驶辅助装置10当在车道维持控制的执行期间由于上述的“转向操作条件Cst_1和转向操作条件Cst_2”中的任一个成立而停止了车道维持控制的情况下,也判断为驾驶员有不希望车辆100的自动转向的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取不重启车道维持控制这一应对。因此,能进行按照驾驶员的意思的应对。
此外,根据以上说明可知,车辆驾驶辅助装置10在“车间距离控制以及车道维持控制”双方的执行期间由于“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作而停止了“车间距离控制以及车道维持控制”双方后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,“车间距离控制重启条件Cacc_restart和车道维持控制重启条件Clta_restart”双方都成立。因而,在该情况下,车辆驾驶辅助装置10将车间距离控制以及车道维持控制双方重启。
另外,车辆驾驶辅助装置10也可以构成为,在重启条件Clta_restart_2成立的情况下,不重启车道维持控制。
<脱手控制的重启>
另外,当在脱手控制的执行期间驾驶员操作了加减速辅助开关85的情况下,推测为驾驶员有不希望车辆100的自动加减速的意思。另外,当在脱手控制的执行期间驾驶员将加速踏板51较大幅地踩下的情况下,也推测为驾驶员有不希望车辆100的自动加减速的意思。另外,当在脱手控制的执行期间驾驶员将制动踏板52较大幅地踩下的情况下,也推测为驾驶员有不希望车辆100的自动加减速的意思。在这样推测为驾驶员有不希望车辆100的自动加减速的意思的情况下,从尊重驾驶员的意思的观点来看优选为,在脱手控制停止后,即使驾驶员操作了驾驶辅助重启开关83,也不重启脱手控制。
于是,车辆驾驶辅助装置10在脱手控制重启条件Cads_restart成立的情况下,将脱手控制重启。脱手控制重启条件Cads_restart在以下的“重启条件Cads_restart_1和重启条件Cads_restart_2”中的任一个成立时成立。
(1)重启条件Cads_restart_1:在脱手控制的执行期间由于“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作而脱手控制被停止后,在任何驾驶辅助控制被开始前驾驶辅助重启开关83被进行了操作并且脱手控制执行条件Cads_start成立。
(2)重启条件Cads_restart_2:在脱手控制的执行期间由于上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立而脱手控制被停止后,在任何驾驶辅助控制被开始前驾驶辅助重启开关83被进行了操作并且脱手控制执行条件Cads_start成立。
如图4所示,根据车辆驾驶辅助装置10,当在脱手控制的执行期间在第1驾驶辅助开关81被进行了操作的时间点t40脱手控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点t41脱手控制被重启。即,车辆驾驶辅助装置10当在脱手控制的执行期间由于第1驾驶辅助开关81被进行了操作而停止了脱手控制的情况下,判断为驾驶员有希望车辆100的自动加减速以及转向的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取将脱手控制重启这一应对。因此,能进行按照驾驶员的意思的应对。
另一方面,如图5所示,当在脱手控制的执行期间在加减速辅助开关85被进行了操作的时间点t50脱手控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点t51脱手控制不被重启,而执行车道维持控制。即,车辆驾驶辅助装置10当在脱手控制的执行期间由于加减速辅助开关85被进行了操作而停止了脱手控制的情况下,判断为驾驶员有不希望车辆100的自动加减速的意思。另外,车辆驾驶辅助装置10当在脱手控制的执行期间由于上述的“加减速操作条件Caccel_1和加减速操作条件Caccel_2”中的任一个成立而停止了脱手控制的情况下,也判断为驾驶员有不希望车辆100的自动加减速的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取不重启脱手控制而执行车道维持控制这一应对。因此,能进行按照驾驶员的意思的应对。
另外,如图6所示,当在脱手控制的执行期间在转向辅助开关86被进行了操作的时间点t60脱手控制被停止了的情况下,之后,在驾驶辅助重启开关83被操作了的时间点t61脱手控制不被重启,而执行车间距离控制。即,车辆驾驶辅助装置10当在脱手控制的执行期间由于转向辅助开关86被进行了操作而停止了脱手控制的情况下,判断为驾驶员有不希望车辆100的自动转向的意思。另外,车辆驾驶辅助装置10当在脱手控制的执行期间由于上述的“转向操作条件Cst_1和转向操作条件Cst_2”中的任一个成立而停止了脱手控制的情况下,也判断为驾驶员有不希望车辆100的自动转向的意思。车辆驾驶辅助装置10在这样进行了判断的情况下,之后,当在没有执行任何驾驶辅助控制时驾驶辅助重启开关83被进行了操作的情况下,采取不重启脱手控制而执行车间距离控制这一应对。因此,能进行按照驾驶员的意思的应对。
此外,车辆驾驶辅助装置10在以下的执行条件Cboth_1和执行条件Cboth_2中的任一个成立的情况下,不使脱手控制重启,而执行车间距离控制以及车道维持控制双方。
(1)执行条件Cboth_1:在脱手控制的执行期间由于“第1驾驶辅助开关81、第2驾驶辅助开关82和取消开关84”中的任一个被进行了操作而脱手控制被停止后,在任何驾驶辅助控制被开始前驾驶辅助重启开关83被进行了操作并且脱手控制执行条件Cads_start不成立。
(2)执行条件Cboth_2:在脱手控制的执行期间由于上述的“追加条件Cadd_1至追加条件Cadd_6”中的任一个成立而脱手控制被停止后,在任何驾驶辅助控制被开始前驾驶辅助重启开关83被进行了操作并且脱手控制执行条件Cads_start不成立。
此外,车辆驾驶辅助装置10也可以构成为,在上述的“停止条件Cads_stop_2和停止条件Cads_stop_3”中的任一个成立的情况下,并非判断为脱手控制停止条件Cads_stop成立,而是判断为车间距离控制切换条件Cacc_change成立。
另外,车辆驾驶辅助装置10也可以构成为,在上述的“停止条件Cads_stop_4和停止条件Cads_stop_5”中的任一个成立的情况下,并非判断为脱手控制停止条件Cads_stop成立,而是判断为车道维持控制切换条件Clta_change成立。
<车道偏离防止控制>
此外,车辆驾驶辅助装置10也可以构成为能够执行车道偏离防止控制。在该情况下,车辆驾驶辅助装置10具备用于让驾驶员选择是否允许执行车道偏离防止控制的开关。
车道偏离防止控制是自动地控制车辆100的转向以使得防止车辆100从当前所行驶的车道(以下记作“当前行驶车道”)偏离的控制。因而,车道偏离防止控制是通过自动进行车辆100的转向从而对驾驶员提供关于车辆100的转向的辅助的控制。
另外,车道偏离防止控制是自动进行车辆100的转向的控制,但却是不容许驾驶员将手离开方向盘53的状态的控制。因而,车道偏离防止控制是不容许驾驶员将手离开方向盘53的状态的非脱手控制。
车辆驾驶辅助装置10在驾驶员选择了允许执行车道偏离防止控制并且车道偏离防止控制执行条件Clda_start成立的情况下,执行车道偏离防止控制。车道偏离防止控制执行条件Clda_start在以下的执行条件Clda_start_1成立时成立。
(1)执行条件Clda_start_1:直至车辆100偏离当前行驶车道的时间在阈值时间以下。车辆驾驶辅助装置10基于图像信息Iimg以及车辆100的行驶速度SPD,判断直至车辆100偏离当前行驶车道的时间是否在阈值时间以下。
另外,车辆驾驶辅助装置10在车辆100通过车道偏离防止控制被转向到不偏离当前行驶车道的位置的时间点,结束车道偏离防止控制。
另外,车辆驾驶辅助装置10在驾驶员选择了不允许执行车道偏离防止控制的情况下,即使车道偏离防止控制执行条件Clda_start成立,也不执行车道偏离防止控制。
另外,车辆驾驶辅助装置10也可以构成为,当在车道偏离防止控制的执行被驾驶员允许了时转向辅助开关86由驾驶员操作了的情况下,判断为驾驶员不希望进行车道偏离防止控制的执行。在该情况下,车辆驾驶辅助装置10构成为当在判断为驾驶员不希望车道偏离防止控制的执行后,转向辅助开关86被操作了的情况下,判断为驾驶员希望车道偏离防止控制的执行。再者,车辆驾驶辅助装置10构成为当在车道偏离防止控制的执行没有被驾驶员允许时转向辅助开关86由驾驶员操作了的情况下,判断为驾驶员希望进行车道偏离防止控制的执行。
车辆驾驶辅助装置10在判断为驾驶员不希望车道偏离防止控制的执行的情况下,即使车道偏离防止控制执行条件Clda_start成立,也不执行车道偏离防止控制。另外,车辆驾驶辅助装置10在判断为驾驶员希望车道偏离防止控制的执行的情况下,只要车道偏离防止控制执行条件Clda_start成立,就执行车道偏离防止控制。
<车辆驾驶辅助装置的具体的工作>
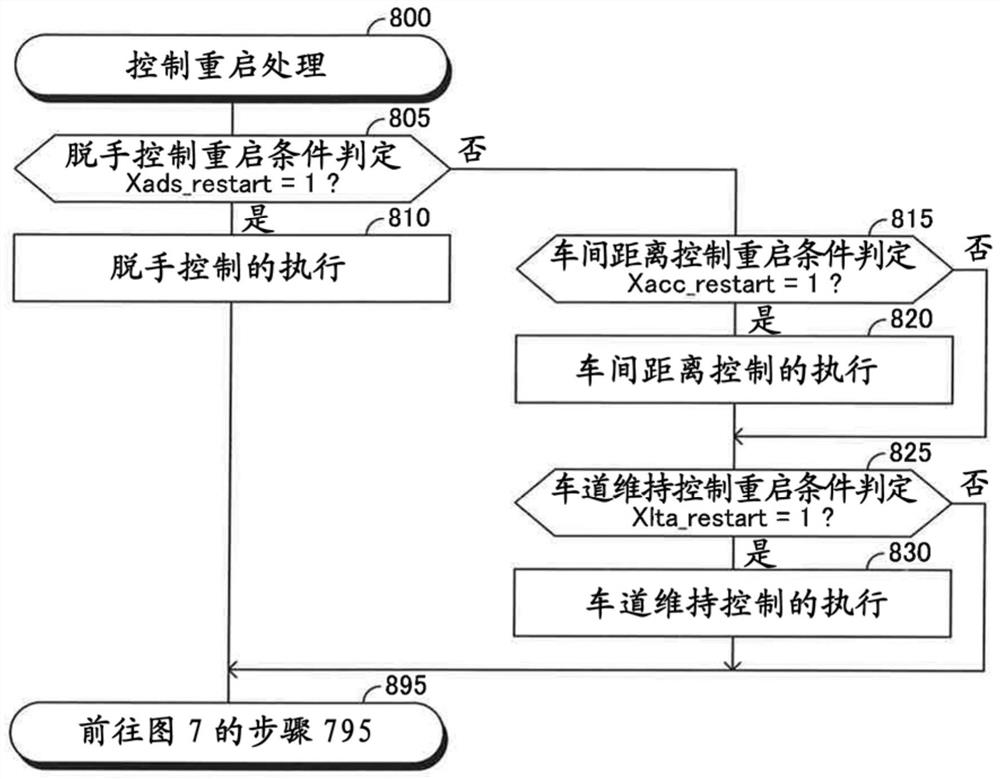
接着,对车辆驾驶辅助装置10的具体工作进行说明。车辆驾驶辅助装置10的ECU90的CPU构成为每当经过预定时间时执行图7所示的例程。
因而,在到预定的定时时,CPU从步骤700开始进行处理,使该处理进入步骤705,判定脱手控制执行标志Xads_start的值是否为“1”。脱手控制执行标志Xads_start的值在脱手控制执行条件Cads_start成立时设定为“1”。另一方面,脱手控制执行标志Xads_start的值在脱手控制停止条件Cads_stop成立时、或者车间距离控制切换条件Cacc_change成立时、或者车道维持控制切换条件Clta_change成立时设定为“0”。
当在步骤705中判定为“是”的情况下,CPU使处理进入步骤710,执行脱手控制。之后,CPU使处理进入步骤795,将本例程暂时结束。
另一方面,当在步骤705中判定为“否”的情况下,CPU使处理进入步骤715,判定车间距离控制执行标志Xacc_start的值是否为“1”。车间距离控制执行标志Xacc_start的值在车间距离控制执行条件Cacc_start成立时设定为“1”。另一方面,车间距离控制执行标志Xacc_start的值在车间距离控制停止条件Cacc_stop成立时设定为“0”。
当在步骤715中判定为“是”的情况下,CPU使处理进入步骤720,执行车间距离控制。之后,CPU使处理进入步骤725。
另一方面,当在步骤715中判定为“否”的情况下,CPU使处理直接进入步骤725。
CPU使处理进入步骤725时,判定车道维持控制执行标志Xlta_start的值是否为“1”。车道维持控制执行标志Xlta_start的值在车道维持控制执行条件Clta_start成立时设定为“1”。另一方面,车道维持控制执行标志Xlta_start的值在车道维持控制停止条件Clta_stop成立时设定为“0”。
当在步骤725中判定为“是”的情况下,CPU使处理进入步骤730,执行车道维持控制。之后,CPU使处理进入步骤795,将本例程暂时结束。
另一方面,当在步骤725中判定为“否”的情况下,CPU使处理进入步骤735,执行图8所示的例程。因而,CPU使处理进入步骤735时,从图8的步骤800开始进行处理,并使该处理进入步骤805,判定脱手控制重启标志Xads_restart的值是否为“1”。脱手控制重启标志Xads_restart的值在脱手控制重启条件Cads_restart成立时设定为“1”。另一方面,脱手控制重启标志Xads_restart的值在脱手控制被停止了时设定为“0”。
当在步骤805中判定为“是”的情况下,CPU使处理进入步骤810,执行脱手控制。之后,CPU使处理经由步骤895进入图7的步骤795,将本例程暂时结束。
另一方面,当在步骤805中判定为“否”的情况下,CPU使处理进入步骤815,判定车间距离控制重启标志Xacc_restart的值是否为“1”。车间距离控制重启标志Xacc_restart的值在车间距离控制重启条件Cacc_restart成立时设定为“1”。另一方面,车间距离控制重启标志Xacc_restart的值在车间距离控制被停止了时设定为“0”。
当在步骤815中判定为“是”的情况下,CPU使处理进入步骤820,执行车间距离控制。之后,CPU使处理进入步骤825。
另一方面,当在步骤815中判定为“否”的情况下,CPU使处理直接进入步骤825。
CPU使处理进入步骤825时,判定车道维持控制重启标志Xlta_restart的值是否为“1”。车道维持控制重启标志Xlta_restart的值在车道维持控制重启条件Clta_restart成立时设定为“1”。另一方面,车道维持控制重启标志Xlta_restart的值在车道维持控制被停止了时设定为“0”。
当在步骤825中判定为“是”的情况下,CPU使处理进入步骤830,执行车道维持控制。之后,CPU使处理经由步骤895进入图7的步骤795,将本例程暂时结束。
另一方面,当在步骤825中判定为“否”的情况下,CPU使处理直接经由步骤895进入图7的步骤795,将本例程暂时结束。
再者,CPU构成为每当经过预定时间时执行图9所示的例程。因而,在到预定的定时时,CPU从图9的步骤900开始进行处理,并使该处理进入步骤905,判定脱手控制停止标志Xads_stop的值是否为“1”。脱手控制停止标志Xads_stop的值在脱手控制停止条件Cads_stop成立时设定为“1”。另一方面,脱手控制停止标志Xads_stop的值在脱手控制被停止了时设定为“0”。
当在步骤905中判定为“是”的情况下,CPU使处理进入步骤910,停止脱手控制。之后,CPU使处理进入步骤995,将本例程暂时结束。
另一方面,当在步骤905中判定为“否”的情况下,CPU使处理进入步骤915,判定车间距离控制切换标志Xacc_change的值是否为“1”。车间距离控制切换标志Xacc_change的值在车间距离控制切换条件Cacc_change成立时设定为“1”。另一方面,车间距离控制切换标志Xacc_change的值在车间距离控制停止条件Cacc_stop成立时设定为“0”。
当在步骤915中判定为“是”的情况下,CPU使处理进入步骤920,停止脱手控制,执行车间距离控制。之后,CPU使处理进入步骤925。
另一方面,当在步骤915中判定为“否”的情况下,CPU使处理直接进入步骤925。
CPU使处理进入步骤925时,判定车道维持控制切换标志Xlta_change的值是否为“1”。车道维持控制切换标志Xlta_change的值在车道维持控制切换条件Clta_change成立时设定为“1”。另一方面,车道维持控制切换标志Xlta_change的值在车道维持控制停止条件Clta_stop成立时设定为“0”。
当在步骤925中判定为“是”的情况下,CPU使处理进入步骤930,停止脱手控制,执行车道维持控制。之后,CPU使处理进入步骤995,将本例程暂时结束。
另一方面,当在步骤925中判定为“否”的情况下,CPU使处理进入步骤935,判定车间距离控制停止标志Xacc_stop的值是否为“1”。车间距离控制停止标志Xacc_stop的值在车间距离控制停止条件Cacc_stop成立时设定为“1”。另一方面,车间距离控制停止标志Xacc_stop的值在车间距离控制被停止了时设定为“0”。
当在步骤935中判定为“是”的情况下,CPU使处理进入步骤940,停止车间距离控制。之后,CPU使处理进入步骤945。
另一方面,当在步骤935中判定为“否”的情况下,CPU使处理直接进入步骤945。
CPU使处理进入步骤945时,判定车道维持控制停止标志Xlta_stop的值是否为“1”。车道维持控制停止标志Xlta_stop的值在车道维持控制停止条件Clta_stop成立时设定为“1”。另一方面,车道维持控制停止标志Xlta_stop的值在车道维持控制被停止了时设定为“0”。
当在步骤945中判定为“是”的情况下,CPU使处理进入步骤950,停止车道维持控制。之后,CPU使处理进入步骤995,将本例程暂时结束。
另一方面,当在步骤945中判定为“否”的情况下,CPU使处理直接进入步骤995,将本例程暂时结束。
以上是车辆驾驶辅助装置10的具体的工作。由此,在推测为驾驶员有不希望车辆100的自动加减速的意思的情况下(在图8的步骤815中判定为“否”的情况下),在车间距离控制停止后,即使驾驶辅助重启开关83被进行了操作,也不重启车间距离控制。另外,在推测为驾驶员有不希望车辆100的自动转向的意思的情况下(在图8的步骤825中判定为“否”的情况下),在车道维持控制停止后,即使驾驶辅助重启开关83被进行了操作,也不重启车道维持控制。
再者,在推测为驾驶员有不希望车辆100的自动加减速的意思的情况下(在图8的步骤805中判定为“否”的情况下),在脱手控制停止后,即使驾驶辅助重启开关83被进行了操作,也不重启脱手控制。另外,在推测为驾驶员有不希望车辆100的自动转向的意思的情况下(在图8的步骤805中判定为“否”的情况下),在脱手控制停止后,即使驾驶辅助重启开关83被进行了操作,也不重启脱手控制。
因此,根据车辆驾驶辅助装置10,能够进行按照驾驶员的意思的驾驶辅助控制。
此外,本发明不限定于上述实施方式,而能够在本发明的范围内采用各种变形例。
例如,车辆驾驶辅助装置10也可以构成为,在车间距离控制的执行期间,即使第1驾驶辅助开关81和第2驾驶辅助开关82中的某一个被进行了操作,也不停止车间距离控制。
同样地,车辆驾驶辅助装置10也可以构成为,在车道维持控制的执行期间,即使第1驾驶辅助开关81和第2驾驶辅助开关82中的某一个被进行了操作,也不停止车道维持控制。
同样地,车辆驾驶辅助装置10也可以构成为,在脱手控制的执行期间,即使第1驾驶辅助开关81和第2驾驶辅助开关82中的某一个被进行了操作,也不停止脱手控制。
- 车辆的驾驶辅助控制装置、车辆的驾驶辅助系统以及车辆的驾驶辅助控制方法
- 车辆的驾驶辅助控制装置、车辆的驾驶辅助系统和车辆的驾驶辅助控制方法