一种风力发电机组叶片净空监测系统及方法
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及风电机组技术领域,特别涉及一种风力发电机组叶片净空监测系统及方法。
背景技术
叶片净空是指风电机组风轮转动时叶片扫过塔筒时,叶尖部位距离塔筒的最小几何距离。叶片迎风受力旋转所形成的旋转曲面形状往往会随风力载荷的变化而变化。随着机主容量的增大,特别是在低风速地区为了捕获更多的风能,高塔筒、长叶片成为低风速风电机组的标配。随叶片长度的增加,叶片的刚度随之减小,叶片在运行中将会产生更大的变形量,为了避免叶片与塔筒间的运动干涉,保证风电机组组的安全运行,需要有效的在线监测手段实时监测叶片与塔筒之间的净空距离。
目前尚无有效可靠的风电机组叶片塔筒净空监测方法,有的厂家将图像捕捉装置安装在机舱前面进行净空距离测量,该种通过对图像进行分析从而得出距离的方法,无法实时计算出净空测量值而且需要图像有较高的清晰度,抗干扰能力差,对测量设备的要求较高;有的厂家采用在风电机组机舱顶部安装激光测距设备来监测叶片净空,但实际监测效果差,不能有效监测叶片的净空距离,同时激光测距设备还会受到雨、雾、沙尘、雾霾、低温等极端天气环境的影响,使有效测量距离减小,从而使得监测功能失效;还有的厂家采用在机舱尾部安装毫米波雷达进行净空距离测量,该种方法通过向外发射电磁波,当遇到目标物之后电磁波将会反射,进入雷达的接收天线。雷达将接收到的信号与发射信号处理得到目标在雷达极坐标系下距离、速度、角度等信息。毫米波雷达虽有非接触、全天候、全天时的特点,但是毫米波雷达受安装条件和风机运行影响较大。
发明内容
本发明的目的在于克服其他技术方案在雨雾沙尘大风等恶劣天气下天气适应性较差,有效测量距离短,且风轮高速旋转下净空监测精度不高,无法提前测量叶片净空距离的问题,提出了一种风力发电机组叶片净空实时监测系统。本发明通过将测距仪安装在电动滑车上,跟随机组偏航一起运动,测距仪提前获取叶片叶尖方位角和距离,迭代计算叶片经过塔筒时叶片净空距离,根据净空距离机组提前执行变桨,防止叶片打塔现象发生,以解决上述背景技术中提出的问题。
本发明为了解决上述技术问题提出如下的技术方案:
一种风力发电机组叶片净空监测系统,其包括设置在塔筒外的净空测距装置和净空控制系统;
所述的净空测距装置包括净空测距仪、测距仪支架、电动滑车、滑轨、和塔筒抱箍;所述塔筒抱箍环绕抱紧在塔筒上,圆环形的滑轨通过若干支撑杆水平固定在塔筒抱箍上,所述净空测距仪通过测距仪支架安装在电动滑车的车架上,且净空测距仪能转动以调整测距的水平转动角和俯仰角;所述电动滑车中带有由电机驱动的滑轮,滑轮与滑轨构成滑动配合,使净空测距仪能够在电机驱动下由电动滑车带动绕塔筒环向360°转动;
所述的净空控制系统用于控制净空测距仪与风机机舱同步偏航运动,获取净空测距仪实时捕获的下一个即将经过塔筒的叶片叶尖方位角和距离,提前计算出叶片经过塔筒时的净空距离,并根据净空距离机组提前执行变桨,防止叶片打塔现象发生。
作为优选,所述的净空测距装置还包括电缆吊挂,塔外电缆通过电缆吊挂悬挂在滑轨下方,塔内电缆通过解缆装置解缆。
作为优选,所述的电动滑车的控制模块与风机主控相连,控制模块获取风机主控提供的偏航信号后,控制电动滑车始终随机组偏航一起同步运动。
作为优选,所述电动滑车中的滑轮以两个为一组,两个上下卡于滑轨上,防止电动滑车脱轨。
作为优选,所述风力发电机组上设置有用于获取机组风向信号的风向仪。
另一方面,本发明提供了一种利用上述任一方案所述监测系统的风力发电机组叶片净空监测控制方法,其步骤如下:
S1、通过风向仪实时获得机组风向信号,当风力发电机组的当前机舱航向与风向仪指向偏离时,主控系统在一段连续时间内监测风向情况,若连续时间内风向确定且机舱不处于对风位置,则主控系统判断当前风向与当前机舱航向所处的方位关系,并控制偏航制动器松开使机舱偏航对准当前风向;在机舱偏航过程中,风机的主控系统将偏航信号同步发送至电动滑车的控制模块,使电动滑车在控制模块的控制下随机组偏航一起同步转动运动,保持净空测距仪的初始激光发射方向也对准当前风向;当机舱和净空测距仪对准完毕后,主控系统控制偏航制动器锁死,电动滑车的滑轮也处于锁死状态,确保风机机舱和净空测距仪均处于同一方向;
S2、在风机的目标叶片转动到塔筒正前方之前,以净空测距仪的初始激光发射方向为基准,提前控制净空测距仪水平和俯仰转动,调整其发射激光的水平方位角为γ,仰视方位角为α,使净空测距仪发射的激光打到目标叶片上,获取净空测距仪到目标叶片激光反射点之间的距离l;风机的主控系统根据测距信息计算出目标叶片转动到塔筒正前方时叶片与塔筒之间的预测净空距离L,计算公式为:L=r+l*cosα*cosγ,式中r为净空测距仪到塔筒的垂直距离;
S3、风机的主控系统将预测净空距离L与净空安全范围进行对比分析,根据对比分析结果对叶片进行变桨动:
当预测净空距离L不小于净空安全范围上限时,机组不执行变桨,继续运行;
当预测净空距离L在净空安全范围内时,需要在叶片到达塔筒前提前完成变桨操作将桨距角增大θ,以此增大叶片到塔筒的净空距离,保障机组安全运行;
当预测净空距离L小于净空安全范围下限时,主控系统判断叶片到塔筒的净空距离已经超过安全范围,直接将桨距角变为90°,且控制机组立即进行自动停机处理。
作为优选,在S1中,所述的一段连续时间为3分钟。
作为优选,在S1中,所述机舱不处于对风位置是指机舱的偏航误差大于8°。
作为优选,在S2中,仰视方位角α应调整至满足以下条件:激光打到目标叶片上时,目标叶片与塔筒的夹角β足够保证目标叶片在达到塔筒正前方前完成变桨操作。
作为优选,在S3中,所述净空安全范围内继续划分为若干安全等级子范围,当位于不同的安全等级子范围时执行的桨距角变化角度θ不同,安全等级子范围越接近净空安全范围下限时θ越大。
与现有技术相比,本发明的有益效果如下:
在本发明中,电动滑车与风机主控相连,可以根据风机主控提供的偏航信号使电动滑车随机组偏航一起运动,由此通过净空测距仪用于捕获叶片叶尖实时数据,将信息发送到主控迭代计算出叶片经过塔筒时的预测净空距离。因为净空测距仪与叶片之间的距离较近,无盲区,受雨、雾、沙尘、大风等恶劣天气影响较小,所以测量得到的净空距离的可靠性比较高。相比较安装在机舱上,净空测距仪安装在电动滑车上随机组偏航一起运动,不受偏航的限制,可以实时精准测量净空值。同时叶片塔筒净空控制方法有多种执行模式,既能保证机组安全运行,又能避免频繁停机对机组的机械结构带来不良的影响,保证发电量。
附图说明
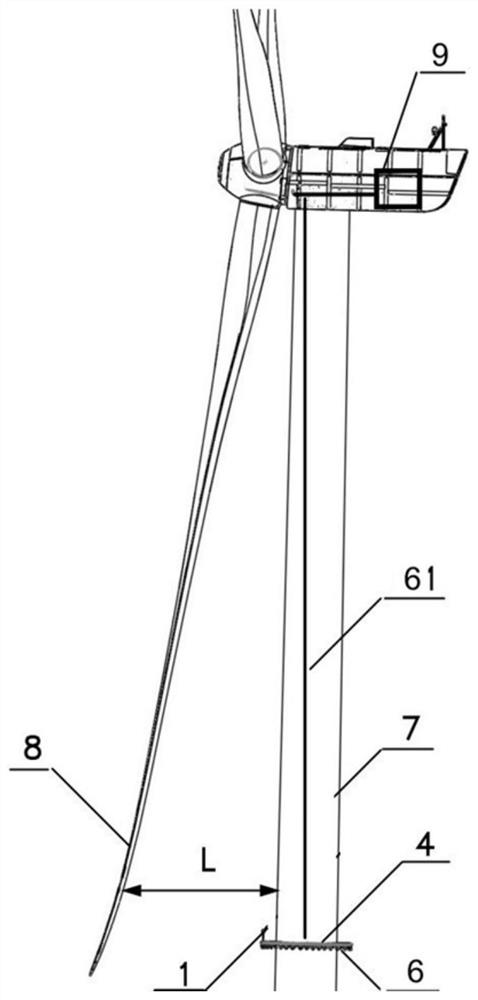
图1为本发明风电机组叶片塔筒净空监测系统示意图。
图2为图1中净空测距装置安装位置的放大示意图。
图3为本发明叶片塔筒净空监测系统电动滑车示意图。
图4为本发明风电机组叶片塔筒净空监测系统塔筒滑轨示意图。
图5为本发明测距仪与滑轨配合示意图。
图6为本发明叶片塔筒净空监测系统叶片与塔筒夹角示意图。
图7为本发明叶片塔筒净空监测系统测距仪照射叶片方位角示意图。
图8为风力发电机组叶片净空监测控制方法流程图。
图中附图标记为:净空测距仪1、测距仪支架2、电动滑车3、滑轨4、塔筒抱箍5、电缆吊挂6、塔筒7、叶片8、主控系统9、滑轮31、电机32、车架33、支撑杆41、控制线束61。
具体实施方式
以下结合附图对本发明的优选实施例进行说明。
请参照图1,图1为本发明实施的风电机组叶片塔筒净空监测系统示意图。其中风力发电机组的结构属于现有技术,不再赘述,其主要结构包括三支叶片8、轮毂、机舱、塔筒、变桨系统、偏航系统、主控系统。本发明的风电机组叶片塔筒净空监测系统包括设置在塔筒外的净空测距装置和净空控制系统,其中净空测距装置包括净空测距仪1、测距仪支架2、电动滑车3、滑轨4、塔筒抱箍5和电缆吊挂6。
请参照图2,塔筒抱箍5是两个半圆形的箍体,可通过两端的螺丝紧固从而环绕抱紧在塔筒7上。滑轨4呈圆环形,滑轨4通过多条支撑杆41水平固定在塔筒抱箍5上,支撑杆41两端分别与滑轨4、塔筒抱箍5焊接固定,整条滑轨4处于同一水平面上。净空测距仪1通过测距仪支架2安装在电动滑车3的车架上,其作用是通过发射激光进行测距。而且在本发明中,为了实现提前的叶片净空距离感知,需要保证净空测距仪1的激光发射端能够转动,以调整测距的水平转动角和俯仰角。净空测距仪1默认的初始激光发射方向是沿水平方向朝向正前方的。而所谓的水平转动角是指净空测距仪水平转动前后的激光发射方向之间的夹角,所谓的俯仰角是指净空测距仪俯仰转动后的激光发射方向之间的夹角。净空测距仪1可以根据实际的测量需要,灵活调整对应的水平转动角和俯仰角。
另外,为了保证测量的准确性,净空测距仪1在转动前的初始朝向应当始终保持与风机机舱同向,即净空测距仪1默认的初始激光发射方向始终朝向机舱的正前方,即正对风向。因此,参见图3所示,净空测距仪1可以通过电动滑车3的滑动改变其朝向,在本发明的电动滑车3中带有由电机32驱动的滑轮31,滑轮31与电机32的输出轴直接相连可由其驱动旋转。电动滑车3的滑轮与滑轨4构成滑动配合,电动滑车3中的滑轮31以两个为一组,两个滑轮31通过车架33行车上下的卡合结构,整体卡于滑轨上滑动,防止电动滑车3脱轨。因此,参见图4和图5所示,净空测距仪1能够在电机驱动下由电动滑车3带动绕塔筒水平环向360°转动。净空测距仪1以及电动滑车3的电机控制模块可以与风机主控系统9之间通过控制线束61相连,控制模块获取风机主控提供的偏航信号后,将其换算呈电机所需的转速,进而控制电动滑车3始终随机组偏航一起同步运动。另外,由于在塔筒上增设了具有会滑动的电动滑车3的净空测距装置,因此可利用设置于滑轨4下方的电缆吊挂6对电缆进行挂接,塔外电缆通过电缆吊挂6悬挂在滑轨4下方,塔内电缆通过解缆装置解缆。
另外,本发明的净空控制系统,其主要作用是用于控制净空测距仪1与风机机舱同步偏航运动,并获取净空测距仪1实时捕获的下一个即将经过塔筒的叶片叶尖方位角和距离,提前计算出叶片经过塔筒时的净空距离,并根据净空距离机组提前执行变桨,防止叶片打塔现象发生。
该净空控制系统的实现模块可以基于风机自身的主控系统来实现,主控系统与机组制动系统、偏航控制系统、变桨控制系统和电动滑车3的电机控制模块相连,进行整体控制,进而实现其所要达到的功能。变桨操作可以有风机自身的变桨控制系统实现,机组的制动由机组制动系统实现,风机机舱的偏航控制由偏航控制系统控制,偏航控制时风力发电机组所处位置的当前风向信息可以通过机组上的风向仪获取。
基于上述净空监测系统,本发明还可以提供一种风力发电机组叶片净空监测控制方法,其步骤如下:
S1、通过风向仪实时获得机组风向信号,当风力发电机组的当前机舱航向与风向仪指向偏离时,主控系统9在一段连续时间(可设置为3分钟)内监测风向情况,若连续时间内风向不稳定则可以不进行偏航控制,但若连续时间内风向确定且机舱不处于对风位置,则主控系统判断当前风向与当前机舱航向所处的方位关系,并控制偏航控制系统中的偏航制动器松开,驱动机舱偏航对准当前风向。
另外,由于机舱偏航后,叶片的方位也将发生变化,因此需要控制净空测距仪1也同步转动。因此,在机舱偏航过程中,风机的主控系统将偏航信号同步发送至电动滑车3的控制模块,使电动滑车3在控制模块的控制下随机组偏航一起同步转动运动(可保持两者相对塔筒的转动角速度相同),保持净空测距仪1的初始激光发射方向也对准当前风向。当机舱和净空测距仪1对准完毕后,主控系统控制偏航制动器锁死,电动滑车3的滑轮31也处于锁死状态,确保风机机舱和净空测距仪1均处于同一方向。在整个风机运行过程中,该同步控制均需要不断进行,使净空测距仪1的初始激光发射方向始终与机舱航向一致,对准风向。
一般而言,机舱的偏航信息会由主控系统以偏航角速度形式下发给电动滑车3在控制模块,因此电动滑车3在控制模块需要将其转换为电机的转动速度,进而控制滑轮31的转动。在本实施例中,参照图8所示,若风向确定,同时机舱不处于对风位置(以机舱的偏航误差大于8°为标准),主控系统9首先判断机舱位置是否处于0位右边,若是,主控系统9控制偏航制动器松开,启动偏航电机风机以0.27°/s左偏航。同时,主控系统9控制电动滑车3的电机32以(27*(d+r)/36000*R)转/s的速度正转,确保与风机机舱一同偏航运动,其中d为塔筒半径,r为净空测距仪1到塔筒7的垂直距离,R为滑轮半径。若不是,主控系统控制偏航制动器松开,启动偏航电机风机以0.27°/s右偏航,主控系统控制滑车电机以(27*(R+r)/1800*d)r/s反转确保与风机机舱一同偏航运动。
净空测距仪1安装在测距仪支架2上,因此主控系统9可根据机组风轮转速、风速、叶片桨距角、叶片长度等信息,提前通过测距预测出叶片经过塔筒时的净空距离,并根据净空距离机组提前执行变桨或者控制风机停机。参见图6所示,本发明中,将下一个即将经过塔筒的叶片作为目标叶片,目标叶片与塔筒的夹角为β。
S2、在风机的目标叶片转动到塔筒正前方之前,以净空测距仪1的初始激光发射方向为基准,提前控制净空测距仪1水平和俯仰转动,调整其发射激光的水平方位角为γ,仰视方位角为α,使净空测距仪1发射的激光打到目标叶片上,获取净空测距仪1到目标叶片激光反射点之间的距离l。风机的主控系统根据测距信息计算出目标叶片转动到塔筒正前方时叶片与塔筒之间的预测净空距离L。
参见图7所示,B位置为净空测距仪1的安装位置,A”为叶片经过塔筒正前方时的叶尖位置,A’为A”在水平面的映射点,A为净空测距仪1发射的激光打到目标叶片上的位置,因此距离l实际为图中AB之间距离,预测净空距离L实际为图中A’B之间距离。虽然目标叶片上实际的A’和A位置并非完全一致,但是由于实际的风机叶片长度往往达到数十米,该差异基本可以忽略。因此根据空间几何关系,可以推出预测净空距离L的计算公式为:
L=r+l*cosα*cosγ
式中r为净空测距仪1到塔筒的垂直距离。
通过上述计算,就可以在目标叶片经过塔筒之前就预测到其后续的净空距离,从而提前进行调整,以避免出现叶片撞塔的现象。
需要注意的是,由于变桨操作往往需要一定的时间才能执行完毕,为了保证变桨操作能够及时在目标叶片经过塔筒之前完成,净空测距仪1发射的激光打到目标叶片上时的角度β需要有一个最低值。该角度β可以通过调整仰视方位角α来实现。即仰视方位角α应调整至满足以下条件:激光打到目标叶片上时,目标叶片与塔筒的夹角β足够保证目标叶片在达到塔筒正前方前完成变桨操作。实际需要满足该条件:β/w
S3、风机的主控系统将预测净空距离L与净空安全范围进行对比分析,根据对比分析结果对叶片进行变桨动:
当预测净空距离L不小于净空安全范围上限时,机组不执行变桨,继续运行;
当预测净空距离L在净空安全范围内时,需要在叶片到达塔筒前提前完成变桨操作将桨距角增大θ,以此增大叶片到塔筒的净空距离,保障机组安全运行;
当预测净空距离L小于净空安全范围下限时,主控系统判断叶片到塔筒的净空距离已经超过安全范围,直接将桨距角变为90°,且控制机组立即进行自动停机处理。
在实际使用时,净空安全范围内可以继续划分为若干安全等级子范围,当位于不同的安全等级子范围时执行的桨距角变化角度θ不同,安全等级子范围越接近净空安全范围下限时θ越大。
在一实施例中,以4.5MW机组额定工况下为例,该对比分析和控制过程如下:
当18.8m≤L,即叶片叶尖净空值大于设计净空值18.8米时,机组不执行变桨,继续运行;
当(18.8-18.8*20%)﹤L﹤18.8m,主控系统判断叶片到塔筒的距离虽然未超过安全范围,但是在后续运行中,有超出安全范围的趋势,需要对净空进行主动控制,桨距角变为2°,保障机组安全运行。
当(18.8-18.8*25%)﹤L≤(18.8-18.8*20%),主控系统判断叶片到塔筒的距离虽然未超过安全范围,但是在后续运行中,有超出安全范围的趋势,需要对净空进行主动控制,桨距角变为4°,保障机组安全运行。
当(18.8-18.8*30%)﹤L≤(18.8-18.8*25%),主控系统判断叶片到塔筒的距离虽然未超过安全范围,但是在后续运行中,有超出安全范围的趋势,需要对净空进行主动控制,桨距角变为5°,保障机组安全运行。
当L≤(18.8-18.8*30%),即叶片叶尖净空值小于最小净空值时,主控系统判断叶片到塔筒的距离已经超过安全范围,桨距角变为90°,机组立即进行自动停机处理。
以上所述实施例只为本发明之较佳实施例,并非以此限制本发明的实施范围,故凡依本发明之形状、原理所作的变化,均应涵盖在本发明的保护范围内。
- 一种风力发电机组叶片净空监测系统及方法
- 风力发电机组的叶片净空监测系统和方法