提升、吊挂和移动载荷的防回转装置和方法
文献发布时间:2023-06-19 10:52:42
本申请是名称为“提升、吊挂和移动载荷的防回转装置和方法”、国际申请日为2018年6月18日、国际申请号为PCT/FR2018/051441、国家申请号为201880040223.7的发明专利申请的分案申请。
技术领域
本发明涉及提升和移动载荷的提升和移动机械吊挂该载荷的防回转装置。本发明还涉及使用这种防回转装置提升和移动载荷的方法。
背景技术
本发明尤其但不仅仅适用于建筑和电缆安装在连续铁塔上的高压线维护领域。某些作业例如需要设置和安装这些铁塔。鉴于铁塔的总重量和一般用于这类作业的机械的有限起重能力,待安装铁塔设计成多个要安装的甚至要装配在一起的独立部分,其在设置地点相继彼此对接安装。为此,一旦各种构件由公路运至工地附近,每个部分进行组装,然后,一般使用起重机例如起重直升机悬挂一根吊索,其自由端固定所述部分,提升和移动每个部分。第一部分铁塔定位在地上,每个另外一个部分装配在前一个上。这类作业的难点之一是在第一铁塔部分在地上定位、或者一个铁塔部分装配在前一个铁塔部分上时,控制每个铁塔部分的定向,这需要提供一种防回转装置。
一般地说,本发明适用于必须提升、移动重载荷然后以良好的定向控制进行放置的任何领域,不管使用什么样的起重机械(直升机、吊车或者其他起重机械)。
一般推荐的第一种解决方案,即铁塔各部分的布置,涉及使用一根电动吊索提升载荷,使之释放,提供多根导绳固定于载荷的下部,例如,用四根绳固定于下部的矩形部分的四角,当载荷即将放置时,地面上的操作人员拉紧绳的自由端。但是,这种解决方案要求载荷以及提升和移动机械附近有人,因此难以做到,而且费时。此外,这有潜在危险,尤其是因为为了安全,在一个铁塔部分的情况下,如果在放置到地面上或者放置到前面布置好的部分上的一般非常有限制性的阶段遇到问题,载荷必须由直升机随时释放。
在铁塔部分布置中特别推荐的第二种解决方案,涉及提供一架直升机完成这项任务,因此,可选地,其具有自身的使起升载荷旋转的不可移动装置。鉴于直升机特有的安全限制条件,这种直升机一般称为飞行起重机,必须非常特殊,因此非常昂贵。此外,其专供提升之用。
另一种解决方案可涉及使用在机械本身上具有多个固定点的吊索系统,限制载荷相对于提升和移动机械的定向。例如,US6533220B2推荐直升机使用这种吊索系统提升和移动载荷。但是,当其可能适合于某些不大重的载荷时,例如作业吊篮,操作人员乘其处理高压线部分,超过一定的重量,例如一个铁塔部分的重量,鉴于对直升机施加的载荷的惯性应力,这会很危险。
因此,理想的是提供一种吊挂载荷的防回转装置,至少消除上述一部分问题和限制条件。
发明内容
因此,提出一种在提升和移动载荷的提升和移动机械之下吊挂该载荷的吊挂防转动装置,吊挂防转动装置具有吊索系统,吊索系统配有固定于提升和移动机械的固定件,吊挂防转动装置还具有分距梁,分距梁具有主纵向轴线和偏转转动横向轴线,分距梁具有:
-固定于吊索系统的上部固定系统,设计为允许分距梁借助吊索系统在提升和移动机械之下悬吊布置成其主纵向轴线基本水平和围绕其偏转转动横向轴线是自由的,
-固定于载荷的下部固定系统,设计成允许通过分距梁围绕其偏转转动横向轴线驱动载荷,
分距梁还具有推进装置,推进装置布置成当分距梁通过吊索系统悬挂于提升和移动机械时,按指令,有选择地沿一个方向或者另一个方向,围绕分距梁的偏转转动横向轴线转动分距梁。
这种自主操纵的防回转装置的优越性是,尤其是使用直升机进行重载荷布置的作业安全可靠,无需在地面上有操作人员太靠近布置地点。特别是,载荷通过分距梁的偏转回转的控制,其本身可控制的定向,例如按遥控指令或者按程序控制进行,确保布置的良好控制。此外,分距梁围绕其偏转回转横向轴线的转动自由度,可减少提升和移动的载荷产生的力矩传输到提升和移动机械。最后,配置这种防转动装置很简单,只要遵循直升机的并非专用于移动铁塔部分的安全规范。
可选地,分距梁设计成纵向延伸的三个部分:
-中央部分,具有向推进装置供电的供给装置,以及
-两个侧部分,能贴靠中央部分收起,具有通过偏转转动进行推进的推进构件,推进构件电连接于中央部分的供给装置。
也是可选的,推进装置具有电动螺旋推进系统,电动螺旋推进系统布置在分距梁的纵向端部。
也是可选地:
-推进装置的第一螺旋推进器布置在分距梁的第一端部,能根据包括在4000至6000转/每分钟之间的第一转动进行起动,使分距梁沿第一偏转转动方向进行转动,以及
-推进装置的第二螺旋推进器,布置在分距梁的第二端部,能根据包括在4000至6000转/每分钟的第二转动进行起动,使分距梁沿着与第一偏转转动方向相反的第二偏转转动方向进行起动。
也是可选地,推进装置的每个螺旋推进器围绕与主纵向轴线以及与分距梁的偏转转动横向轴线都正交的轴线,布置在基本上呈圆柱形的流线型导管中。
也是可选地,防护格栅布置在每个流线型导管的入口和出口。
也是可选地,分距梁具有目视指示器,目视指示器具有至少三种不同的目视状态,从至少三种可能的不同操作状态中,指示分距梁的偏转角度控制器的一种操作状态:
-分距梁的偏转角度控制器不起动的状态,
-分距梁的偏转角度控制器起动、但是等待角度控制设定的状态,以及
-分距梁的偏转角度控制器根据接收的设定角度进行起动的状态。
也是可选地,吊索系统的主吊索用于承载分距梁的偏转转动横向轴线,主吊索在其端部之一具有旋转体,旋转体连接于提升和移动机械或者连接于分距梁。
本发明也提出使用吊挂防转动装置提升和移动载荷的方法,其包括以下步骤:
-将吊挂防转动装置的吊索系统固定于提升和移动机械的固定步骤,
-将吊挂防转动装置固定于载荷的固定步骤,
-借助提升和移动机械,向放置区域提升和移动载荷的提升和移动步骤,以及
-在载荷的提升和移动步骤期间,控制分距梁的推进装置以使之保持在一个设定方向的控制步骤,所述设定方向是相对于与提升和移动机械或者与地面相关的参考坐标系围绕偏转转动横向轴线进行限定的。
可选地,载荷是电缆输电线路的一个铁塔部分,提升和移动机械是载有吊索系统的直升机。
附图说明
根据下面参照附图仅作为非限制性实施例给出的说明,本发明将得到更好的理解,附图如下:
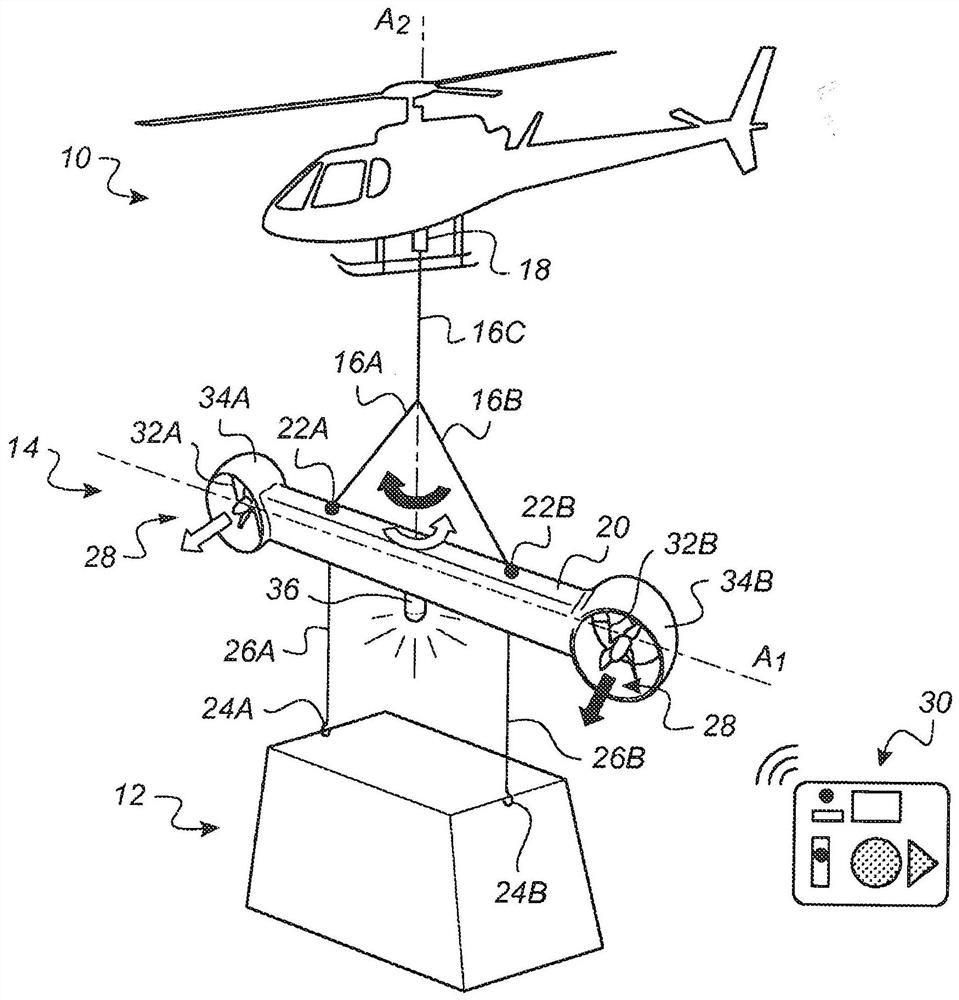
-图1示意地示出根据本发明的一个实施例的用于吊挂载荷的防转动装置的通用结构;
-图2示意地详细示出图1所示防转动装置的功能性电动机械构件;
-图3示出图1所示防转动装置的分距梁的分解布置;
-图4示出使用图1所示的防转动装置提升和移动载荷的方法的连续步骤;
-图5示出图1所示防转动装置的遥空器的操作方法的连续步骤;以及
-图6示出图1所示防转动装置的微型控制器的操作方法的连续步骤。
具体实施方式
图1示意地示出的设备具有提升和移动机械10例如直升机,载荷12例如高压电缆输电线路的铁塔部分,以及在提升和移动机械10之下吊挂该载荷12的防转动装置14。
防转动装置14具有吊索系统16A、16B、16C,吊索系统配有固定于直升机10的固定件,例如旋转体18。吊索系统还具有分距梁20,其具有主纵向轴线A和偏转转动横向轴线A
更准确地说,使用吊索系统16A、16B、16C,第一上部固定系统22A、22B用来使分距梁20悬吊在其主纵向轴线A
更准确地说,第二下部固定系统24A、24B设计成用于允许通过分距梁20围绕其偏转转动横向轴线A
根据本发明的一般原理,分距梁20还具有推进装置28,推进装置布置成当其通过吊索系统16A、16B、16C自直升机10悬挂下来时,使用遥空器30或者通过程序控制,有选择地沿一个方向或者另一个方向,围绕其偏转转动横向轴线A,按指令进行转动。更准确地说,推进装置具有电动螺旋推进器,其布置在分距梁20的两个纵向端部。因此,至少一个第一螺旋推进器32A布置在分距梁20的第一端部,相对于轴线A,与钩22A和24A位于同一侧。更准确地说,其布置在第一流线型导管34A中,第一流线型导管围绕一条与轴线A
最后,分距梁20具有目视指示器,其具有多种不同的目视状态,例如多种不同的颜色,从多种可能的不同操作状态中,指示分距梁20的一个偏转角度控制器的操作状态。可选地,但是有利地,设置至少三种操作状态:
-分距梁20的偏转角度控制器不起动的状态:目视指示器36可用红色指示这种状态,
-分距梁20的偏转角度控制器起动、但是等待角度控制设定的状态:目视指示器36可用橙色指示这种状态,以及
-分距梁20的偏转角度控制器根据接收的设定角度进行起动的状态:目视指示器36可用绿色指示这种状态。
现在,参照图2详细说明分距梁20的推进装置28以及遥控器30。
根据第一个可能的实施例,遥控器30具有:
-开关40,
-供电蓄电池充电电平指示器42(例如用条图的形式),
-方式选择器44,其在梁20相对于与直升机10有关的角度参考坐标系的偏转定向的第一种控制方式与梁20相对于与地面有关的角度参考坐标系的偏转定向的第二种控制方式之间进行选择,
-显示设定角度α
-调节在屏幕46上显示的设定角度α
-随动控制开关50,其使分距梁20的偏转角度控制器根据显示的设定角度α
这种控制器30可供直升机10的驾驶员或副驾驶员使用,其根据是否装载、输送或放置铁塔部分12、或者甚至输送空分距梁20,在第一种和第二种控制方式之间进行选择。
根据一个简化实施例,控制器30可没有方式选择器44,仅根据第二种控制方式进行操纵。这种简化控制可由地面操作人员进行。
图2在操作上示出的推进装置28安装在分距梁20中。其具有安装在其流线型导管34A中的第一螺旋推进器32A,驱动第一螺旋推进器32A的第一电动机52A,以及控制第一电动机52A的功率的第一变换器54A。其还具有安装在其流线型导管34B中的第二螺旋推进器32B,驱动第二螺旋推进器32B的第二电动机52B,以及控制第二电动机52B的功率的第二变换器54B。最后,其具有电子控制箱56,其用来控制第一和第二变换器54A、54B。电子控制箱56、变换器54A、54B和电动机52A、52B,由一个或多个也安装在分距梁20中的蓄电池58供电。
更准确地说,电子控制箱56具有控制第一和第二变换器54A、54B的程控微型控制器60。其还具有接收遥控器30发出的无线电信号的接收器62,该接收器62连接于微型控制器60,提供设定角度α
如图3所示,分距梁20最好设计成三个部分,当其安装和操作时,所述三个部分沿主轴线A
如图3所明示,分距梁20的这种构形使之能够在地面上安装然后使用之前,储存在结构非常紧凑的容积V中,例如直升机10中。鉴于这种分距梁20在用于安装承载大约数米例如大约5米的电线的铁塔期间的最适长度,这种三个可收起部分的构形确实有利。
图4示出使用上述防转动装置14提升和移动载荷例如铁塔部分12的方法的连续步骤。
在前一步骤100期间,分距梁20例如由直升机10运送和安装在铁塔部分12的提升地点。其由开关68操纵开动,因此指示器66上可见的蓄电池充电度水平可予以检查。吊索系统16A、16B、16C由钩22A和22B固定于分距梁20,形成防转动装置14。
在步骤102期间,吊索系统16A、16B、16C例如使用旋转体18,固定于直升机10。
在步骤104期间,防转动装置14通过可选吊索电动钩24A和24B,固定于铁塔部分12。
然后,在提升和移动载荷的步骤106期间,直升机10输送铁塔部分12至放置区域,使之放置在地面上,或者该区域的另一个铁塔部分上。在该步骤期间,分距梁20的推进装置28可以使用遥控器30或者通过程序控制进行控制(步骤108),使分距梁20保持在根据直升机10或者地面的参考坐标系围绕偏转转动横向轴线限定的设定方向。例如,在铁塔部分的提升阶段,推进装置28可控制成使分距梁20保持在其在地面上的方向,防止铁塔部分12围绕轴线A
最后,在最后步骤110期间,铁塔部分12根据遥控电动钩24A和24B释放所需的定向进行放置。
刚刚说明的步骤104至110可重复进行,完成由多个部分组成的铁塔的安装。有利地,其为从放置区域的安装平台进行安装铁塔的常规安装程序的一部分。
鉴于载运的载荷和这种程序中直升机进行的任何提升和移动的安全要求,最好遵循以下控制条件:
-选择碳纤维复合材料用于分距梁20及其流线型导管34A、34B的结构,可选地甚至也用于螺旋推进器32A、32B,用于不超过5米长、150千克重、能承载高达4.5吨静载荷和19吨动载荷的防转动装置,
-选择电动机52A、52B,其功率接近15千瓦或者更大,重量各低于2千克,当与螺旋推进器32A、32B连接时,其推力达到400牛顿以上,
-选择螺旋推进器32A、32B,其能够转动4000至6000转/每分钟,在这种情况下,这种螺旋推进器的转动方向不能反转:在螺旋推进器交替开动而从不一起开动的条件下,这不会产生任何问题,
-选择蓄电池,其在控制期间具有至少5小时的电池寿命,维持48伏的总电压和100安培小时的充电容量:两个各24伏、总重量约为50千克、串联安装的锂-铁-钋蓄电池比较合适。
现在,参照图5的流程图,来详细说明遥控器30在其具有方式选择器44的实施例中的操作。
在第一步骤200期间,该遥空器30由直升机10的驾驶员或副驾驶员操纵。其具有指示开动的主指示器,以及指示角度控制器启动或停止启动的控制指示器。这些指示器此刻关闭。
下一个步骤202是等待步骤,等待使用开关40启动遥控器30。只要其保持关闭,主指示器就保持关闭,全部功率被切断(步骤204)。一旦驾驶员或副驾驶员操纵开关40,遥控器30接通,其主指示器启动,充电电平指示器42起动,起动的信息信号被传输到电子控制箱的接收器62(步骤206)。
启动后,在步骤208检验方式选择器44的状态。如果方式选择器44在梁20相对于直升机10的角度参考坐标系的第一种偏转控制方式上,那么,进行一系列步骤210至220。如果方式选择器44在梁20相对于地面的角度参考坐标系的第二种偏转控制方式上,那么,进行一系列步骤222至232。
步骤210是遥控器30等待角度控制设定的一个指示步骤。这可使用一个预定信息进行,例如显示屏46上的“备用系统”(STBY)。
步骤212是作用于控制指示器的步骤,使之指示角度控制停止启动。因此,控制指示器例如是红色。
下一个步骤214是等待作用于随动控制开关50的步骤。只要驾驶员或者副驾驶员不作用于该开关50,就不继续通过步骤210和212。一旦角度控制器通过作用于开关50进行起动,就进行作用于控制指示器的步骤216,使之指示角度控制器起动。因此,控制指示器例如变成绿色,屏幕46上显示的设定角度α
下一个步骤218是可作用于轮48的步骤,以便校准设定角度αC的期望值,例如相对于步骤216中角度归零,为-180至+180度。只要控制器起动(控制指示器为绿色),选择的设定角度值α
最后,步骤220是一个等待作用于随动控制开关50的步骤。只要驾驶员或者副驾驶员不再作用于该开关50,就不继续通过步骤218:例如在一个铁塔部分的输送和布置的整个展开期间。一旦角度控制器通过作用于开关50不启动,例如一旦铁塔部分12依照要求放置好,步骤210返回到:屏幕46上显示因而回到指示“备用系统”(STBY),控制指示器返回到红色。
步骤222至232分别相同于步骤210至220,除步骤230之外,其不包括传输直升机10相对于地面的角度参考坐标系的角定向α
当然,根据上述详细说明,如果没有供地面操作人员使用的方式选择器,遥控器30的操作易于简化。
现在,参照图6的流程图,来详细说明防转动装置14的控制箱56的微型控制器60的操作。该操作允许使用多个遥空器30,其具有或者没有方式选择器。
在第一步骤300期间,电子控制箱56通过作用于开关68进行启动。这种作用引起目视指示器36转换为红色(步骤302),在指示器66上指示蓄电池58的充电电平。
然后,在检验步骤304期间,微型控制器60进行搜索,检查是否至少一个遥空器30启动。如果情况不是这样的,再进行步骤302。
如果至少一个遥空器30启动,则进行另一个检验步骤306,在此期间,微型控制器60进行搜索,检查是否至少两个遥空器30启动。如果是这种情况,则再进行步骤302,微型控制器60不接受同时使用两个或两个以上的起动的遥空器。
如果仅仅一个遥空器30启动,则进行步骤308,目视指示器36转换为橙色。
下一个步骤310是等待接收角度控制设定的步骤。只要分距梁20的角度控制器未通过作用于一个遥空器30的开关50进行起动,微型控制器60回到步骤308和310。
当接收器62接收指示角度控制器启动的信息信号时,目视指示器36转换到绿色,进行新的检验步骤312。
在该步骤312期间,微型控制器60检查是否接收器62接收单独的或者伴有直升机10的角定向α
如果接收器62接收两个角值α
在步骤314期间,微型控制器60也处于梁20相对于直升机10的角度参考坐标系的第一种偏转控制方式。
因此,其在步骤316期间执行以下计算:
Δ=α
于是,在检验步骤318期间,微型控制器60对其计算结果Δ与角容限的预定门限值例如5度进行比较。只要Δ保持小于该阈值,就返回到步骤316。
一旦Δ超过阈值,微型控制器60就进行步骤320,驱动两个螺旋推进器32A和32B之一,使分距梁20处于α
在步骤322期间,微型控制器60进入梁20相对于地面的角度参考坐标系的第二种偏转控制方式。
因此,其在步骤324期间执行以下计算:
Δ=α
于是,在检验步骤326期间,微型控制器60比较其计算结果Δ与角容限的预定门限值。只要Δ保持小于该阈值,就返回到步骤324。
一旦Δ超过阈值,微型控制器60就进行步骤328,驱动两个螺旋推进器32A和32B之一,使分距梁20处于α
步骤320和328可继之以分别返回到步骤316和324,更进一步地知道驾驶员、副驾驶员或者地面上的操作人员随时可使用轮48改变设定角度α
此外,在步骤312至320或者328之间无论什么时候,对起动的遥控器30的开关50的任何作用致使微型控制器60返回到步骤308。同样,在步骤308和320或328之间,对任一个遥控器30的开关40的任何作用,致使微型控制器60返回到步骤302。
显然,上述那样的防转动装置可控制载荷从固定在提升和移动该载荷的机械上的一个单个固定点进行自身偏转转动,不传输载荷产生的力矩。此外,装置设计、调节、使用和维护简单。其也可通过电动钩24A、24B,更安全地进行自动应急投放。其也比较轻便,在耗电方面自行调节,可以从提升和移动机械或者从地面遥控操纵。因此,载荷附近无需有人。最后,易于设计,不干扰承载机械例如直升机的电力设备。
此外,应当指出,本发明不局限于上述具体设备和实施例。
特别是,一个实施例已予以详述,推进装置28据此使用一个或多个遥空器30进行操纵。但是,另一个实施例可直接在微型控制器60中,提供一种或多种设定角度α
一般地说,对现有技术的专业人员显而易见的是,可以根据其所述的特征,对上述实施例进行各种改变。在以下的权利要求书中,使用的用语不可理解为权利要求书限于本说明书中所述的实施例,而应当理解为其中包括权利要求书旨在在说明中覆盖的、现有技术领域的专业人员在力所能及的范围内应用其一般知识为实现所述技术特征而提供的所有等效的实施例。
- 提升、吊挂和移动载荷的防回转装置和方法
- 提升、吊挂和移动载荷的防回转装置和方法