一种纸品刮胶机
文献发布时间:2023-06-19 11:00:24
技术领域
本发明属于纸张刮胶技术领域,具体涉及一种纸品刮胶机。
背景技术
目前,纸品包装成型过程中,需要使用到双面胶。在生产过程中,需要人工先进行去离型纸处理,才能进行后端成型工序。该工序需要使用到大量人力,效率低下,双面胶成本又高,同时去除的离型纸也是对资源的浪费和环境的伤害。
为提高生产效率,减少资源浪费和对环境的伤害,降低企业生产成本,业内也开始研究能够替换上述工艺的设备和方法。例如于2019年05月14日公开的公告号CN109746165A的中国发明专利申请“一种涂胶机和涂胶方法”。其实现了热熔胶代替双面胶,提高企业生产效率。然而,该设备在生产中无法实现定距离定节拍生产,其中宽枪所刮胶型会出现前薄后厚或则前厚后薄的情况,刮胶效果不理想,且还存在着更换产品生产时,宽胶必须根据产品需要更换模具,所以设备的可调节性差,综合效率底。
发明内容
本发明的目的是解决上述问题,提供一种通过合理设置工位,通过两把窄枪机构将原有一把宽枪机构替换,保证刮胶效果,通过设置参数来满足不同产品生产,不需更换模具,以此提高生产效率和生产品质,增加设备综合效率的纸品刮胶机。
为解决上述技术问题,本发明的技术方案是:一种纸品刮胶机,包括纸张吸取装置、第一刮胶装置、第二刮胶装置、第三刮胶装置和流水线吸风平台,第一刮胶装置、第二刮胶装置和第三刮胶装置位于流水线吸风平台上,纸张通过纸张吸取装置的吸取后放置在流水线吸风平台上,然后依次通过第一刮胶装置、第二刮胶装置和第三刮胶装置进行刮胶作业,完成对纸张的刮胶。
优选地,所述纸张吸取装置包括纸张放置支架,纸张升降装置、吸纸装置、纸张放置装置和纸张移动装置,纸张放置在纸张升降装置上,纸张移动装置带动纸张升降装置移动到吸纸装置下方,纸张升降装置将纸张升起,吸纸装置将纸张吸附后通过纸张放置装置运送到待加工位置。
优选地,所述第一刮胶装置包括第一刮胶装置架、X轴电机、X轴连杆、X轴滑块、Y轴电机、Y轴丝杠、Y轴滑块、Y轴连接板、Y轴装置架、第一Z轴电机、第一Z轴丝杆、第一Z轴滑块、第一Z轴连接架和第一胶枪,X轴连杆位于第一刮胶装置架上,X轴电机位于X轴连杆的端部,X轴电机通过同步带与X轴滑块相连,X轴滑块与Y轴连接板相连,X轴电机工作时通过同步带带动X轴滑块和Y轴连接板同步运动;Y轴电机位于Y轴连接板上,Y轴电机与Y轴丝杠的端部相连,Y轴丝杠的另一端与Y轴滑块相连,Y轴滑块与Y轴装置架相连,Y轴电机工作时带动Y轴丝杠运动,继而带动Y轴滑块与Y轴装置架运动;第一Z轴连接架与Y轴装置架相连,第一Z轴电机与第一Z轴连接架固连,第一Z轴电机与第一Z轴丝杆相连,第一Z轴丝杆与第一Z轴滑块螺纹连接,第一Z轴滑块与第一胶枪相连,第一Z轴电机工作时带动第一Z轴丝杆旋转,同时带动第一Z轴滑块与第一胶枪运动。
优选地,所述第二刮胶装置包括第二刮胶装置支架、第二刮胶装置连接杆、第二Z轴电机、第二Z轴丝杆、第二Z轴滑块、第二Z轴连接架和第二胶枪,第二刮胶装置连接杆两端与第二刮胶装置支架固连,第二Z轴连接架套设在第二刮胶装置连接杆上,第二Z轴电机通过第二Z轴丝杆与第二Z轴滑块相连,第二Z轴滑块与第二胶枪固连,第二Z轴电机工作时带动第二Z轴丝杆转动,然后带动第二Z轴滑块和第二胶枪运动。
优选地,所述第二刮胶装置连接杆的数量为二且互相平行布置。
优选地,所述第三刮胶装置与第二刮胶装置结构相同。
优选地,所述流水线吸风平台包括平台风机、热熔胶机、光纤传感器、编码器、平台支架、平台皮带、平台壳体、平台电机、平台减速器和平台摩擦轮,热熔胶机、光纤传感器和编码器分别位于平台皮带的两边,平台电机的转轴端与平台减速器的输入端相连,平台减速器的输出端通过同步带与平台摩擦轮相连,平台皮带与平台摩擦轮的外表面相连且为摩擦传动,平台摩擦轮带动平台皮带转动;平台风机与平台壳体连通,平台壳体和平台皮带上均设有吸风通孔,平台风机产生的空气吸力通过吸风通孔将纸张吸附在平台皮带上。
优选地,所述第一刮胶装置、第二刮胶装置、第三刮胶装置依次位于平台支架上。
本发明的有益效果是:本发明所提供的一种纸品刮胶机通过合理设置工位,提高生产效率,增加设备的可调节性,能实现设备定距离定节拍生产。通过合理设置工位,通过两把窄枪机构将原有一把宽枪机构替换,保证刮胶效果。通过设置参数来满足不同产品生产,不需更换模具,以此提高生产效率和生产品质,增加设备综合效率的纸品刮胶机。
附图说明
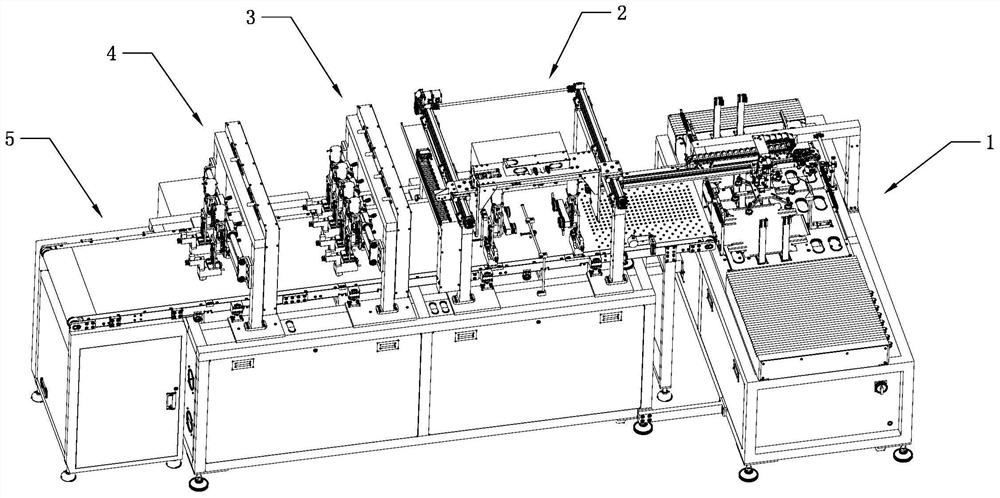
图1是本发明一种纸品刮胶机的结构示意图;
图2是本发明纸张吸取装置的结构示意图;
图3是本发明吸纸装置和纸张放置装置连接结构示意图;
图4是本发明纸张升降装置的结构示意图;
图5是本发明纸张升降装置的侧向结构示意图;
图6是本发明吸纸件和吸纸连接头的结构示意图;
图7是本发明吸纸件和吸纸连接头的剖视结构示意图;
图8是本发明第一刮胶装置的结构示意图;
图9是本发明第二刮胶装置和第三刮胶装置结构对比示意图;
图10是本发明流水线吸风平台的结构示意图;
图11是本发明流水线吸风平台的侧向结构示意图。
附图标记说明:1、纸张吸取装置;2、第一刮胶装置;3、第二刮胶装置;4、第三刮胶装置;5、流水线吸风平台;11、纸张放置支架;12、纸张升降装置;13、吸纸装置;14、纸张放置装置;15、纸张移动装置;20、第一刮胶装置架;21、X轴电机;22、X轴滑块;23、Y轴电机;24、Y轴丝杠;25、Y轴滑块;26、第一Z轴电机;27、第一Z轴丝杆;28、第一Z轴滑块;29、第一胶枪;31、第二刮胶装置支架;32、第二刮胶装置连接杆;33、第二Z轴电机;34、第二Z轴丝杆;35、第二Z轴滑块;36、第二Z轴连接架;37、第二胶枪;51、平台风机;52、热熔胶机;53、光纤传感器;54、编码器;55、平台皮带;56、平台壳体;57、平台电机;58、平台摩擦轮;121、纸张升降步进电机;122、纸张放置板;123、纸张放置板导杆;124、纸张放置丝杆;125、纸张升降装置底板;126、纸张升降装置底板杆;131、吸纸底板;132、吸纸连杆;133、吸纸件;134、吸纸连接头;135、真空分气块;136、吸纸气缸;141、纸张放置电机;142、纸张放置运动杆;143、纸张放置皮带;144、纸张放置滑块;145、纸张放置连接件;151、纸张移动装置轨;152、纸张移动装置电机;153、纸张移动装置滑块。
具体实施方式
下面结合附图和具体实施例对本发明做进一步的说明:
如图1到图11所示,本发明提供的一种纸品刮胶机,包括纸张吸取装置1、第一刮胶装置2、第二刮胶装置3、第三刮胶装置4和流水线吸风平台5,第一刮胶装置2、第二刮胶装置3和第三刮胶装置4位于流水线吸风平台5上,纸张通过纸张吸取装置1的吸取后放置在流水线吸风平台5上,然后依次通过第一刮胶装置2、第二刮胶装置3和第三刮胶装置4进行刮胶作业,完成对纸张的刮胶。
如图2到图7纸张吸取装置1包括纸张放置支架11,纸张升降装置12、吸纸装置13、纸张放置装置14和纸张移动装置15,纸张放置在纸张升降装置12上,纸张移动装置15带动纸张升降装置12移动到吸纸装置13下方,纸张升降装置12将纸张升起,吸纸装置13将纸张吸附后通过纸张放置装置14运送到流水线吸风平台5上。
纸张升降装置12包括纸张升降步进电机121、纸张放置板122、纸张放置板导杆123、纸张放置丝杆124和纸张升降装置底板125,纸张升降步进电机121套设在纸张放置丝杆124上,纸张放置丝杆124的端部穿过张升降装置底板125与纸张放置板122相连,纸张放置板导杆123的端部穿过张升降装置底板125与纸张放置板122相连,纸张升降步进电机121工作时带动纸张放置丝杆124上下运动,继而带动纸张放置板122上下运动。
纸张放置板导杆123的数量根据实际使用情况而定,以便保证纸张放置板122在运动过程中平稳。纸张升降步进电机121内设有步进电机转子,纸张升降步进电机121的步进电机转子套设在纸张放置丝杆124上且为螺纹啮合,纸张升降步进电机121工作时带动步进电机转子转动,然后使纸张放置丝杆124上下运动。在本实施例中,纸张升降步进电机121与纸张放置丝杆124构成贯穿式丝杠步进电机,纸张升降步进电机121在工作过程中驱动纸张放置丝杆124上下运动,贯穿式丝杠步进电机为现有成熟技术设备。
纸张升降装置底板125上设有直线轴承,直线轴承套设在纸张放置板导杆123上,保证纸张放置丝杆124在带动纸张放置板122上下运动时,带动纸张放置板导杆123平稳的运动。纸张升降装置底板125的下表面上还设有纸张升降装置底板杆,纸张升降装置底板杆126上依次固设有上极限感应器和下极限感应器。纸张放置丝杆124在上升过程中,上极限感应器感应到纸张放置丝杆124端部时使纸张升降步进电机121反向转动,当下极限感应器感应到纸张放置丝杆124端部时使纸张升降步进电机121反向转动,继而控制纸张放置丝杆124在设定的区域内进行上下运动。在本实施例中的上极限感应器和下极限感应器为接近传感器且为现有成熟技术设备。
吸纸装置13包括真空阀、吸纸底板131、吸纸连杆132、吸纸件133、吸纸连接头134、真空分气块135和吸纸气缸136,吸纸底板131上设有吸纸底板连接件,吸纸底板连接件与吸纸气缸136的活塞杆端相连,真空分气块135与吸纸底板连接件固连。吸纸气缸136在工作过程中通过吸纸底板连接件带动真空分气块135上下运动。
真空阀通过管道与真空分气块135相连,真空分气块135通过管道与吸纸连接头134相连,吸纸连接头134与吸纸件133连通,吸纸连接头134和吸纸件133分别位于吸纸连杆132的两面,真空阀产生的真空吸力通过管道由真空分气块135传递到吸纸连接头134后再通过吸纸件133将纸张进行吸附。真空阀为现有设备,真空阀为真空分气块135提供真空吸附力。
真空分气块135上设有真空分气块进气孔和真空分气块出气孔,真空分气块进气孔和真空分气块出气孔连通,真空阀通过管道与真空分气块进气孔连通,真空分气块出气孔通过管道与吸纸连接头134连通。真空分气块135为长方体结构,真空分气块进气孔和真空分气块出气孔的数量根据实际工作过程中的需要进行适当的增减。在使用时,当真空分气块出气孔的数量有闲置没有与吸纸连接头134相连时,应当将空闲的真空分气块出气孔用堵头密封,防止影响其余真空分气块出气孔正常工作。
在本实施例中吸纸连杆132的数量为六个,且均匀的分布在吸纸底板131的底部。在实际使用时可根据实际需要对吸纸连杆132的数量进行增减,以便能够更好地吸附纸张。
纸张放置14包括纸张放置电机141、纸张放置运动杆142、纸张放置皮带143、纸张放置滑块144、纸张放置连接件145,纸张放置电机141与纸张放置运动杆142的端部相连。纸张放置皮带143环绕在纸张放置运动杆142上并与纸张放置电机141相连,纸张放置滑块144分别与纸张放置皮带143和纸张放置连接件145固连,纸张放置连接件145与吸纸气缸136固连,纸张放置电机141工作时带动纸张放置皮带143运动,继而带动纸张放置滑块144同步运动,纸张放置滑块144运动时带动吸纸装置13同步运动。纸张放置14还包括拖链,拖链与纸张放置连接件145固连。
纸张移动装置15包括纸张移动装置轨151、纸张移动装置电机152,纸张移动装置同步带和纸张移动装置滑块153,纸张移动装置同步带位于纸张移动装置轨151上,纸张移动装置同步带和纸张移动装置滑块153固连,纸张移动装置滑块153与纸张升降装置12相连,纸张移动装置电机152通过纸张移动装置同步带带动纸张移动装置滑块153运动,继而带动纸张升降装置12同步运动。
在本实施例中,纸张移动装置滑块153与纸张升降装置底板125固连,纸张移动装置滑块153运动时带动纸张升降装置底板125同步运动。纸张升降装置12的数量为二且分布在吸纸装置13的下方,纸张升降装置12内安装好待加工的纸张,其中一个纸张升降装置12中的纸张在吸纸装置13吸附完后,纸张移动装置电机152工作带动纸张移动装置滑块153移动从而使纸张升降装置底板125运动将另外一个纸张放置板122运动到吸纸装置13下方继续进行吸纸作业。通过设置两个纸张升降装置12能够实现吸纸装置13不间断的吸纸作业,增加工作效率和节省工作等待时间。
在实际使用过程中,将待加工的纸张放置在纸张放置板122上,通过纸张移动装置电机152的运动带动纸张升降装置底板125运动,继而带动纸张放置板122运动到吸纸装置13的下方。吸纸气缸136伸出后,真空阀工作通过管道将产生的空气吸力通过吸纸件133将纸张吸附住,然后吸纸气缸136退回提起纸张,最后由纸张放置电机141工作将纸张运送到流水线吸风平台5上方,吸纸气缸136伸出放下纸张,真空阀断开空气吸力,吸纸件133将纸张放置在流水线吸风平台5上,吸纸气缸136退回,从而完成纸张的放置作业。本发明所采用的纸张吸附及放置,结构简单,使用操作方便,同时能够节约人力成本。
如图8所示,第一刮胶装置2包括第一刮胶装置架20、X轴电机21、X轴连杆、X轴滑块22、Y轴电机23、Y轴丝杠24、Y轴滑块25、Y轴连接板、Y轴装置架、第一Z轴电机26、第一Z轴丝杆27、第一Z轴滑块28、第一Z轴连接架和第一胶枪29。
X轴连杆位于第一刮胶装置架21上,X轴电机21位于X轴连杆的端部,X轴电机21通过同步带与X轴滑块22相连,X轴滑块22与Y轴连接板相连,X轴电机21工作时通过同步带带动X轴滑块22和Y轴连接板同步运动。
Y轴电机23位于Y轴连接板上,Y轴电机23与Y轴丝杠24的端部相连,Y轴丝杠24的另一端与Y轴滑块25相连,Y轴滑块25与Y轴装置架相连,Y轴电机23工作时带动Y轴丝杠24运动,继而带动Y轴滑块25与Y轴装置架运动。第一Z轴连接架与Y轴装置架相连,第一Z轴电机26与第一Z轴连接架固连,第一Z轴电机26与第一Z轴丝杆27相连,第一Z轴丝杆27与第一Z轴滑块28螺纹连接,第一Z轴滑块28与第一胶枪29相连,第一Z轴电机26工作时带动第一Z轴丝杆27旋转,同时带动第一Z轴滑块28与第一胶枪29运动。
Y轴装置架的开口朝下且呈“U”字型结构,Y轴装置架上设有平行布置的Y轴装置架连杆。在本实施例中,第一Z轴电机26、第一Z轴丝杆27、第一Z轴滑块28、第一Z轴连接架和第一胶枪29构成第一Z轴涂胶装置。第一Z轴涂胶装置的数量为二,第一Z轴涂胶装置中的第一Z轴连接架套设在Y轴装置架连杆上。
X轴电机21工作时,通过电机的正反转带动Y轴连接板一起沿X轴连杆运动。Y轴电机23工作时,通过丝杆螺母传动的方式带动Y轴装置架沿Y轴丝杠24运动。第一Z轴电机26工作时带动第一胶枪29上下运动。通过对X轴电机21、Y轴电机23和第一Z轴电机26的控制,继而实现对第一胶枪29的运动轨迹进行控制,从而实现设定位置的刮胶工作。
如图9所示,第二刮胶装置3包括第二刮胶装置支架31、第二刮胶装置连接杆32、第二Z轴电机33、第二Z轴丝杆34、第二Z轴滑块35、第二Z轴连接架36和第二胶枪37,第二刮胶装置连接杆32两端与第二刮胶装置支架31固连,第二Z轴连接架36套设在第二刮胶装置连接杆32上,第二Z轴电机33通过第二Z轴丝杆34与第二Z轴滑块35相连,第二Z轴滑块35与第二胶枪37固连,第二Z轴电机33工作时带动第二Z轴丝杆34转动,然后带动第二Z轴滑块35和第二胶枪37运动。第二刮胶装置连接杆32的数量为二且互相平行布置。第二Z轴连接架36在第二刮胶装置连接杆32上的位置可以根据实际需要进行调节,以便能够完成不同位置的刮胶作业。
在本实施例中第二Z轴电机33、第二Z轴丝杆34、第二Z轴滑块35、第二Z轴连接架36和第二胶枪37构成第二Z轴涂胶装置。第二Z轴涂胶装置与第一涂胶装置的结构相同。
第三刮胶装置4与第二刮胶装置3结构相同,在本实施例中,第三刮胶装置4与第二刮胶装置3的区别点在于第二Z轴涂胶装置的数量不同,第三刮胶装置4与第二刮胶装置3在实际使用过程中,第二Z轴涂胶装置的数量可以根据实际使用过程中的需要进行适当的增减。
流水线吸风平台5包括平台风机51、热熔胶机52、光纤传感器53、编码器54、平台支架、平台皮带55、平台壳体56、平台电机57、平台减速器和平台摩擦轮58,热熔胶机52、光纤传感器53和编码器54分别位于平台皮带55的两边,平台电机57的转轴端与平台减速器的输入端相连,平台减速器的输出端通过同步带与平台摩擦轮58相连,平台皮带55与平台摩擦轮58的外表面相连且为摩擦传动,平台摩擦轮58带动平台皮带55转动;平台风机51与平台壳体56连通,平台壳体56和平台皮带55上均设有吸风通孔,平台风机51产生的空气吸力通过吸风通孔将纸张吸附在平台皮带55上。
平台壳体56为中空的长方体结构,平台壳体56的上表面和平台皮带55上的吸风通孔为连通状态,平台壳体56下部与平台风机51相连通。平台风机51工作时产生空气吸力通过吸风通孔将平台皮带55上的纸张吸附住,使其在刮胶过程中不与皮带产生相对移动等情况,能够完成准确位置的刮胶作业。
热熔胶机52与第一胶枪29和第二胶枪37连通,热熔胶机52能够将热熔胶熔化,替换传统的双面胶,供给第一胶枪29和第二胶枪37使用。在本实施例中,第一胶枪29、第二胶枪37、热熔胶机52、光纤传感器53、编码器54均为现有成熟技术设备。
第一刮胶装置2、第二刮胶装置3、第三刮胶装置4依次位于平台支架上,本发明在工作时,通过纸张吸取装置1将待涂胶的纸张吸附后放置在流水线吸风平台5上,纸张通过流水线吸风平台5上的平台皮带55运动分别输送到第一刮胶装置2、第二刮胶装置3、第三刮胶装置4下面,第一刮胶装置2、第二刮胶装置3、第三刮胶装置4对纸张完成涂胶作业。同时通过光纤传感器53、编码器54进行反馈纸张的运动位置,可以实现定距和定节拍的生产作业。在本发明中,通过调节第一刮胶装置2、第二刮胶装置3、第三刮胶装置4中胶枪的位置以及根据光纤传感器53和编码器54反馈的纸张位置数据来调节各刮胶开始的位置和刮胶结束位置等位置参数,从而改变刮胶位置,满足不同产品生产的需求。
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
- 一种纸品刮胶机
- 一种刮胶装置及薄纸刮胶机