甘蔗收获机及其前悬挂割台根切深度控制装置与方法
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及一种甘蔗收获机,特别是一种甘蔗收获机及其前悬挂割台根切深度控制装置与方法。
背景技术
甘蔗是世界主要糖料作物之一,世界甘蔗年均种植面积约为2200万公顷。其中,主要分布在巴西、印度、中国、古巴和澳大利亚等国家。我国的甘蔗种植面积约为170万公顷,主要分布在广西、云南和广东省区。甘蔗收获有整秆式收获和切段式收获及分段式收获三种基本方式。在澳大利亚、美国等实现了全程机械化的国家,甘蔗收获的主流机型是大型切段式联合收割机。目前我国甘蔗主产区使用的甘蔗收获机主要有大、中型切段式联合收割机和整秆式甘蔗联合收获机及引进的大型切段式甘蔗联合收获机。
甘蔗联合收割机分为整秆式甘蔗联合收获机和切段式联合收获机,整秆式甘蔗联合收获机收获流程一般是:分行扶蔗——根切——喂入——整秆输送——剥叶——集蔗;切段式联合收获机收获流程一般是:分行扶蔗——根切——喂入——整秆输送——切段——排杂——集蔗输送,或扶蔗——根切——切段——输送——排杂——集蔗输送;整秆式和切段式联合收获机的共同特点是根切在联合收获机的前部,甘蔗收获机的根切质量是收获性能的一项重要指标,甘蔗为多年生宿根作物,根切质量直接影响宿根破头程度和来年甘蔗生长植株密度及产量,为保证甘蔗收获宿根切割质量,基本上要求割刀入土5cm内切割,实践证明采取5cm内入土切割一方面提高宿根切割质量和来年宿根发芽生长率,另一方面大大降低甘蔗根切损失;目前我国使用的整秆式和切段式甘蔗联合收获机,在根切高度控制方面主要有两种方式:一种是甘蔗联合收获机作业时,收获机驾驶员根据多年驾驶经验,把割台降到一定程度收割,在连续作业过程中依据驾驶员判断地形变化和机器负荷情况适当的调整割台高度,这种方式受人为因素和地块地形变化因素影响很大,甘蔗根切质量无法稳定保证;另一种是进口的大型切段甘蔗收获机,甘蔗根切深度依据根切马达功率消耗(或油路压力)变化自动调节控制,在甘蔗生长密度比较均衡和种植地比较平整的地块收获作业,甘蔗根切质量较好,但在甘蔗生长密度不均和地块地形变化较大的种植地作业,甘蔗根切质量变差,而我国甘蔗种植主产区主要集中在广西、云南、广东等地,种植地大部分是丘陵山地,地块地形变化较大,且70%左右为宿根蔗,生长密度不均。
发明内容
本发明所要解决的技术问题是针对现有技术的上述问题,提供一种甘蔗收获机及其前悬挂割台根切深度控制装置与方法。
为了实现上述目的,本发明提供了一种甘蔗收获机的前悬挂割台根切深度控制装置,安装在甘蔗收获机的前悬挂割台上,所述前悬挂割台上设置有左扶蔗器、右扶蔗器、扶蔗器升降油缸、前悬挂割台升降油缸、甘蔗切段液压马达和甘蔗根切液压马达,所述左扶蔗器和右扶蔗器分别与前悬挂割台连接,所述扶蔗器升降油缸的一端与所述前悬挂割台连接,所述扶蔗器升降油缸的另一端与所述左、右扶蔗器连接;所述前悬挂割台升降油缸的一端与所述前悬挂割台连接,所述前悬挂割台升降油缸的另一端与所述甘蔗收获机的机架连接,其中,所述前悬挂割台根切深度控制装置包括:
仿形轮,分别与所述左、右扶蔗器连接,所述仿形轮设置有转角传感器,用于测量甘蔗地沟底地形变化并得到仿形轮参数θ;
液压电控比例阀,与所述扶蔗器升降油缸、前悬挂割台升降油缸、甘蔗切段液压马达和甘蔗根切液压马达连接,所述液压电控比例阀上安装有压力传感器和流量传感器,用于测量所述甘蔗根切液压马达功率消耗变化并得到根切马达功耗参数N;以及
根切深度自动调节控制器,与所述转角传感器和液压电控比例阀连接,用于接收所述仿形轮参数θ和根切马达功耗参数N,并通过PID模糊控制算法得到相应结果指令,并根据所述结果指令控制所述扶蔗器升降油缸和/或前悬挂割台升降油缸相应调整所述左、右扶蔗器和前悬挂割台的升降,实现甘蔗根切深度自动调控。
上述的前悬挂割台根切深度控制装置,其中,所述仿形轮包括仿形轮体、仿形轮臂和仿形轮连接销轴,所述仿形轮臂的一端通过轮体连接销轴安装在所述仿形轮体上,所述仿形轮连接销轴安装在所述仿形轮臂的另一端,所述转角传感器安装在所述仿形轮连接销轴上。
上述的前悬挂割台根切深度控制装置,其中,所述仿形轮连接销轴的端面上设置有安装孔,所述转角传感器安装在所述安装孔内。
上述的前悬挂割台根切深度控制装置,其中,所述左扶蔗器分别通过扶蔗器上连接杆和扶蔗器下连接杆与所述前悬挂割台连接并构成四杆机构,所述右扶蔗器分别通过另一扶蔗器上连接杆和扶蔗器下连接杆与所述前悬挂割台连接并构成四杆机构。
上述的前悬挂割台根切深度控制装置,其中,所述扶蔗器升降油缸为双作用油缸,所述扶蔗器升降油缸的一端与所述前悬挂割台连接,所述扶蔗器升降油缸的另一端与所述扶蔗器下连接杆连接,通过所述扶蔗器升降油缸的伸缩控制所述左、右扶蔗器的升降。
为了更好地实现上述目的,本发明还提供了一种甘蔗收获机的前悬挂割台根切深度控制方法,其中,包括如下步骤:
S100、获取垄高参数H、仿形轮参数θ和根切马达功耗参数N,并分别设定初始化垄高参数H
S200、实时接收仿形轮参数θ和根切马达功耗参数N,并与设定的所述初始化参数进行比较运算,通过PID模糊控制算法得到相应结果指令;以及
S300、根据所述结果指令控制所述扶蔗器升降油缸和/或前悬挂割台升降油缸相应调整所述左、右扶蔗器和前悬挂割台的升降,实现甘蔗根切深度自动调控。
上述的前悬挂割台根切深度控制方法,其中,步骤S100中,进一步包括:
S101、获取垄高参数H,测定甘蔗收获机作业地块甘蔗种植垄高参数H并求均值作为所述初始化垄高参数H
S102、获取仿形轮参数θ,在前悬挂割台降到割刀达到农艺要求的甘蔗宿根切割高度h
S103、获取根切马达功耗参数N,在所述甘蔗收获机处于垄高参数H
上述的前悬挂割台根切深度控制方法,其中,步骤S200中,进一步包括:
S201、通过液压电控比例阀中的压力传感器和流量传感器检测根切马达功耗参数N,并与所述初始化根切马达功耗参数N
S202、若N>N
S203、若θ=θ
上述的前悬挂割台根切深度控制方法,其中,在步骤S300中,进一步包括:
S301、根据所述前悬挂割台上升的结果指令,根切深度自动调节控制器控制前悬挂割台升降油缸调整所述前悬挂割台上升,直至N=N
S302、根据所述前悬挂割台下降的结果指令,根切深度自动调节控制器控制前悬挂割台升降油缸调整所述前悬挂割台下降,直至N=N
为了更好地实现上述目的,本发明还提供了一种甘蔗收获机,其中,包括上述的前悬挂割台根切深度控制装置,并采用上述的前悬挂割台根切深度控制方法实现甘蔗根切深度自动调控。
本发明的技术效果在于:
本发明在甘蔗收获机配套工作时,通过仿形轮感知甘蔗地沟底地形变化,通过液压传感器感知甘蔗根切马达功率消耗变化,通过CAN总线接收沟底地形变化和根切马达功率消耗变化指令,执行PID模糊控制算法,并依据算法相应结果,控制液压阀动作,及控制前置割台和左右扶蔗器的升降,实现根切深度精度范围自动调控,解决了现有甘蔗收获机根切深度人为控制困难和差异性大,或单一根切马达功率消耗控制准确度低的问题,甘蔗根切深度自动调控精确度高。
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
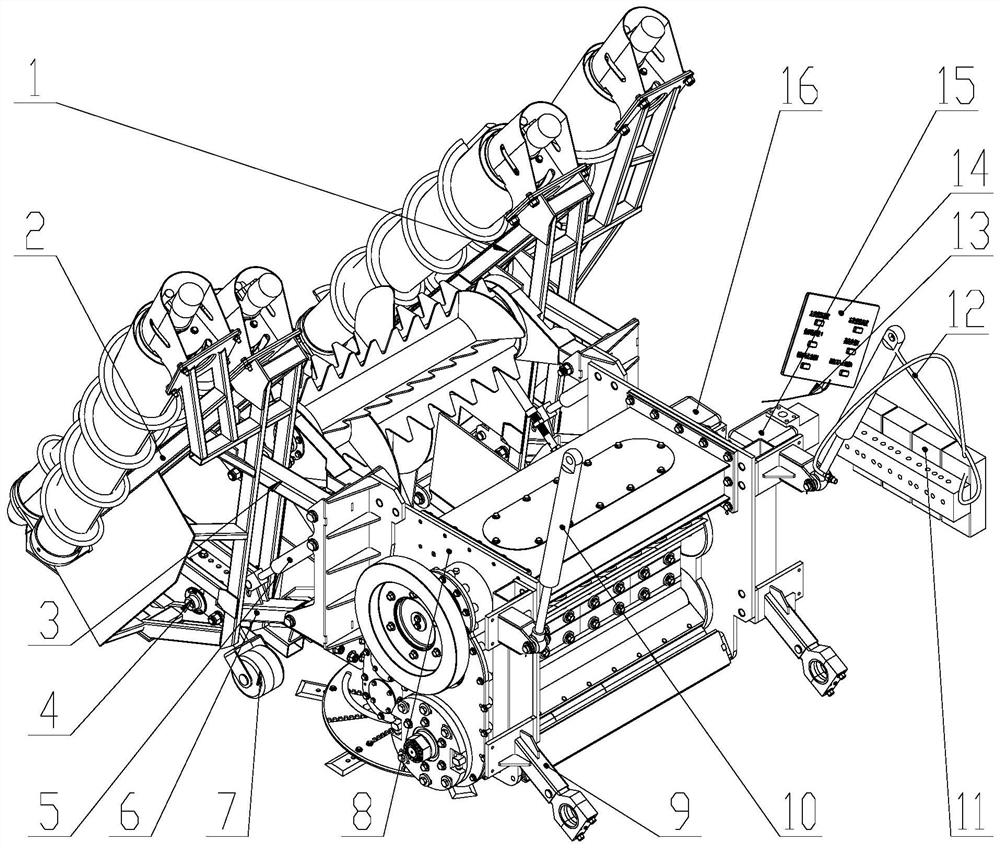
图1为本发明一实施例的前悬挂割台根切深度控制装置左视轴测图;
图2为图1的右视轴测图;
图3为本发明一实施例的仿形轮结构示意图;
图4为本发明一实施例的仿形轮检测地面原理图;
图5为本发明一实施例的根切深度控制原理图;
图6为本发明一实施例的根切深度控制参数初始化流程图;
图7为本发明一实施例的根切深度控制流程图。
其中,附图标记
1 右扶蔗器
2 左扶蔗器
3 扶蔗器上连接杆
4 转角传感器
5 扶蔗器升降油缸
6 扶蔗器下连接杆
7 仿形轮
71 仿形轮体
72 轮体连接销轴
73 仿形轮臂
74 仿形轮连接销轴
8 前悬挂割台
9 前悬挂割台连接臂
10 前悬挂割台升降油缸
11 液压电控比例阀
12 液压连接管路
13 电控线束
14 根切深度自动调节控制器
15 切段液压马达
16 根切液压马达
具体实施方式
下面结合附图对本发明的结构原理和工作原理作具体的描述:
本发明的甘蔗收获机,包括前悬挂割台根切深度控制装置,并采用前悬挂割台根切深度控制方法实现甘蔗根切深度自动调控,实现了甘蔗收获过程中,根切深度精度范围的自动调控,解决了现有甘蔗收获机根切深度人为控制困难和差异性大,或采用单一根切马达功率消耗控制准确度低的问题,该甘蔗收获机的甘蔗根切深度自动调控精确度高,使用方便,适用于多种地形,受操作人员的人为影响因素小。该收获机其他部分的组成、结构、相互位置关系、连接关系及其功用等均为较成熟的现有技术,故在此不做赘述,下面仅对本发明的前悬挂割台根切深度控制装置予以详细说明。
参见图1及图2,图1为本发明一实施例的前悬挂割台根切深度控制装置左视轴测图,图2为图1的右视轴测图。本发明的前悬挂割台根切深度控制装置,安装在甘蔗收获机的前悬挂割台8上,所述前悬挂割台8通过前悬挂割台连接臂9使其下端与甘蔗收获机的机架连接,前悬挂割台升降油缸10一端与前悬挂割台8上端连接,另一端与机架连接,所述前悬挂割台8上设置有左扶蔗器2、右扶蔗器1、扶蔗器升降油缸5、前悬挂割台升降油缸10、甘蔗切段液压马达15和甘蔗根切液压马达16,所述左扶蔗器2和右扶蔗器1分别与前悬挂割台8连接,所述扶蔗器升降油缸5的一端与所述前悬挂割台8连接,所述扶蔗器升降油缸5的另一端与所述左扶蔗器2、右扶蔗器1连接;所述前悬挂割台升降油缸10的一端与所述前悬挂割台8连接,所述前悬挂割台升降油缸10的另一端与所述甘蔗收获机的机架连接,所述前悬挂割台根切深度控制装置包括:仿形轮7,分别与所述左扶蔗器2、右扶蔗器1连接,所述仿形轮7设置有转角传感器4,用于测量甘蔗地沟底地形变化并得到仿形轮参数θ;液压电控比例阀11,通过液压连接管路12与所述扶蔗器升降油缸5、前悬挂割台升降油缸10、甘蔗切段液压马达15和甘蔗根切液压马达16连接,所述液压电控比例阀11上安装有压力传感器和流量传感器,用于测量所述甘蔗根切液压马达16功率消耗变化并得到根切马达功耗参数N,其中压力传感器主要感知根切马达等油路压力,流量传感器感知根切马达等油路流量,用于计算根切马达功耗参数N;以及根切深度自动调节控制器14,通过电控线束13与所述转角传感器4和液压电控比例阀11连接,用于接收所述仿形轮参数θ和根切马达功耗参数N,并通过PID模糊控制算法得到相应结果指令,并根据所述结果指令控制所述扶蔗器升降油缸5和/或前悬挂割台升降油缸10相应调整所述左扶蔗器2、右扶蔗器1和前悬挂割台8的升降,实现甘蔗根切深度自动调控。
参见图3,图3为本发明一实施例的仿形轮结构示意图。本实施例的仿形轮7分别与左扶蔗器2、右扶蔗器1的销轴连接,在仿形轮7销轴上安装转角传感器4,感知仿形轮参数θ。仿形轮7包括仿形轮体71、仿形轮臂73和仿形轮连接销轴74,所述仿形轮臂73的一端通过轮体连接销轴72安装在所述仿形轮体71上,所述仿形轮连接销轴74安装在所述仿形轮臂73的另一端,所述转角传感器4安装在所述仿形轮连接销轴74上。其中,优选所述仿形轮连接销轴74的端面上设置有安装孔,所述转角传感器4安装在所述安装孔内。
本实施例中,所述左扶蔗器2分别通过扶蔗器上连接杆3和扶蔗器下连接杆6与所述前悬挂割台8连接并构成四杆机构,所述右扶蔗器1分别通过另一扶蔗器上连接杆3和扶蔗器下连接杆6与所述前悬挂割台8连接并构成四杆机构。所述扶蔗器升降油缸5优选为双作用油缸,所述扶蔗器升降油缸5的一端与所述前悬挂割台8连接,所述扶蔗器升降油缸5的另一端与所述扶蔗器下连接杆6连接,通过所述扶蔗器升降油缸5的伸缩控制所述左扶蔗器2、右扶蔗器1的升降。
该前悬挂割台根切深度控制装置的根切深度控制方法,包括仿形轮7检测地面(沟底)起伏变化、根切深度仿形控制装置参数初始化及根切深度控制。参见图4,图4为本发明一实施例的仿形轮检测地面原理图。其为仿形轮7检测地面(沟底)起伏变化示意图,A为地面平坦时,B为地面凸起时,C为地面凹陷时仿形轮7的各参数示意。假设沟底地面凸起时与沟底地面平坦时仿形轮7位置高度差为△h,沟底地面凹陷时与沟底地面平坦时仿形轮7位置高度差为△h′及θ
Δh=L cosθ
其中,△h为地面凸起时与地面平坦时仿形轮7位置高度差;△h′为地面凹陷时与地面平坦时仿形轮7位置高度差,L为轮体连接销轴72到仿形轮连接销轴74的中心距离,θ
参见图5,图5为本发明一实施例的根切深度控制原理图。本发明的前悬挂割台根切深度控制方法,包括仿形轮参数θ和根切马达功耗N的信号反馈,比较运算,差值输出和模糊自适应PID控制,最终实现甘蔗根切仿形切割。其根切深度控制流程,包括仿形控制初始化,车载控制器信号获取,根切马达功耗和仿形轮参数信号的比较运算及模糊自适应PID控制。具体包括如下步骤:
步骤S100、获取垄高参数H、仿形轮参数θ和根切马达功耗参数N,并分别设定初始化垄高参数H
步骤S200、实时接收仿形轮参数θ和根切马达功耗参数N,并与设定的初始化仿形轮参数θ
步骤S300、根据所述结果指令控制所述扶蔗器升降油缸5和/或前悬挂割台升降油缸10相应调整所述左扶蔗器2、右扶蔗器1和前悬挂割台8的升降,实现甘蔗根切深度自动调控。
参见图6,图6为本发明一实施例的根切深度控制参数初始化流程图。本实施例的步骤S100中,进一步包括:
步骤S101、获取垄高参数H,测定甘蔗收获机作业地块甘蔗种植垄高参数H并求均值作为所述初始化垄高参数H
步骤S102、获取仿形轮参数θ,在前悬挂割台8降到割刀达到农艺要求的甘蔗宿根切割高度h
步骤S103、获取根切马达功耗参数N,在所述甘蔗收获机处于垄高参数H
其中,步骤S200中,进一步包括:
步骤S201、通过液压电控比例阀11中的压力传感器和流量传感器检测根切马达功耗参数N,并与所述初始化根切马达功耗参数N
步骤S202、若N>N
步骤S203、若θ=θ
其中,在步骤S300中,进一步包括:
步骤S301、根据所述前悬挂割台8上升的结果指令,根切深度自动调节控制器14控制前悬挂割台升降油缸10调整所述前悬挂割台8上升,直至N=N
步骤S302、根据所述前悬挂割台8下降的结果指令,根切深度自动调节控制器14控制前悬挂割台升降油缸10调整所述前悬挂割台8下降,直至N=N
本发明的甘蔗收获机与前悬挂割台根切深度控制装置一起作业时,开始阶段所有仪器设备开机准备完毕,把甘蔗收获机开到甘蔗种植地对行准备好,按照本发明根切深度仿形控制装置的参数初始化流程作业,获取实地的垄高参数H
参见图7,图7为本发明一实施例的根切深度控制流程图。本实施例中,甘蔗收获机车载控制器实时接收仿形轮参数θ和根切马达功耗参数N,首先进行与初始化根切马达功耗参数N
本发明通过仿形轮感知甘蔗地沟底地形变化,和通过液压电控比例阀中压力传感器和流量传感器感知甘蔗根切马达功率消耗变化,根切深度自动调节控制器通过CAN总线接收沟底地形变化和根切马达功率消耗变化指令,执行PID模糊控制算法,根据算法相应结果,从而控制液压阀动作,控制前置割台和左、右扶蔗器的升降,实现根切深度自动调控,解决了现有技术甘蔗收获机根切深度人为控制困难和差异性大,或单一依靠根切马达功率消耗控制准确度低的难题。
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
- 甘蔗收获机及其前悬挂割台根切深度控制装置与方法
- 甘蔗收获机及其前悬挂割台根切深度控制装置