动态功率定位方法及其动态功率定位系统
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种动态功率定位方法及其动态功率定位系统,特别涉及一种利用不同功率的信号来定位的动态功率定位方法及其动态功率定位系统。
背景技术
传统上室内设备的定位方法常常使用三边定位,而三边定位所需要的距离通常都是使用信号强度或是飞行时间(ToA,Time of Arrivial)所计算出来。因此信号强度或是飞行时间计算的准确度会影响推断出来的距离,进而影响三边定位的准确性。现有技术中的定位方法都只仰赖固定功率发射信号。基于固定发射信号功率的定位方法,以致于定位准确度受限于单一功率信号的衰退形式。
现今如同手机的移动设备,往往都配备其他不同功能的感测器,搭配陀螺仪、电子罗盘这一类的感测器可以很好地辅助并改善定位精准度。然而考量到设备的成本,室内定位设备不一定会搭配各式各样的感测器。室内定位在没有其他感测器辅助的情况下,只能依靠信号强度来推估距离并且使用此数据来进行定位。然而,于现有技术中,蓝牙设备的信号强度往往变动很大,造成定位误差很大。
因此,有必要发明一种新的动态功率定位方法及其动态功率定位系统,以解决现有技术的缺失。
发明内容
本发明的主要目的在于提供一种动态功率定位方法,可达到利用不同功率的信号来定位的效果。
本发明的另一主要目的在于提供一种用于上述方法的动态功率定位系统。
为达成上述的目的,本发明的动态功率定位方法是用于动态功率定位系统以找出空间内的待测定位设备的设备位置,空间还包括多个已知位置设备。方法包括以下步骤:控制待测定位设备以多个发射功率发射多个定位信号;使多个已知位置设备接收多个定位信号,并记录该多个定位信号强度、多个对应接收时间及该多个已知位置设备的坐标到数据库;找出所接收的多个定位信号中信号强度较大的已知位置设备;由数据库中取出信号强度-距离函数及信号强度-距离标准差函数;以及根据信号强度-距离函数及信号强度-距离标准差函数以找出待测定位设备的设备位置。
本发明的动态功率定位系统包括处理模块、数据库及计算模块。处理模块是控制待测定位设备以多个发射功率发射多个定位信号,使多个已知位置设备接收多个定位信号。数据库系电性连接处理模块,用以储存信号强度-距离函数及信号强度-距离标准差函数,且于多个已知位置设备接收多个定位信号后,数据库系记录该多个定位信号强度、多个对应接收时间及该多个已知位置设备的坐标,藉此处理模块是找出所接收的该多个定位信号中信号强度较大的已知位置设备。计算模块系电性连接数据库,用以根据多个定位信号的强度、多个对应接收时间及强度较大的已知位置设备查询信号强度-距离函数及信号强度-距离标准差函数,以找出待测定位设备的设备位置。
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
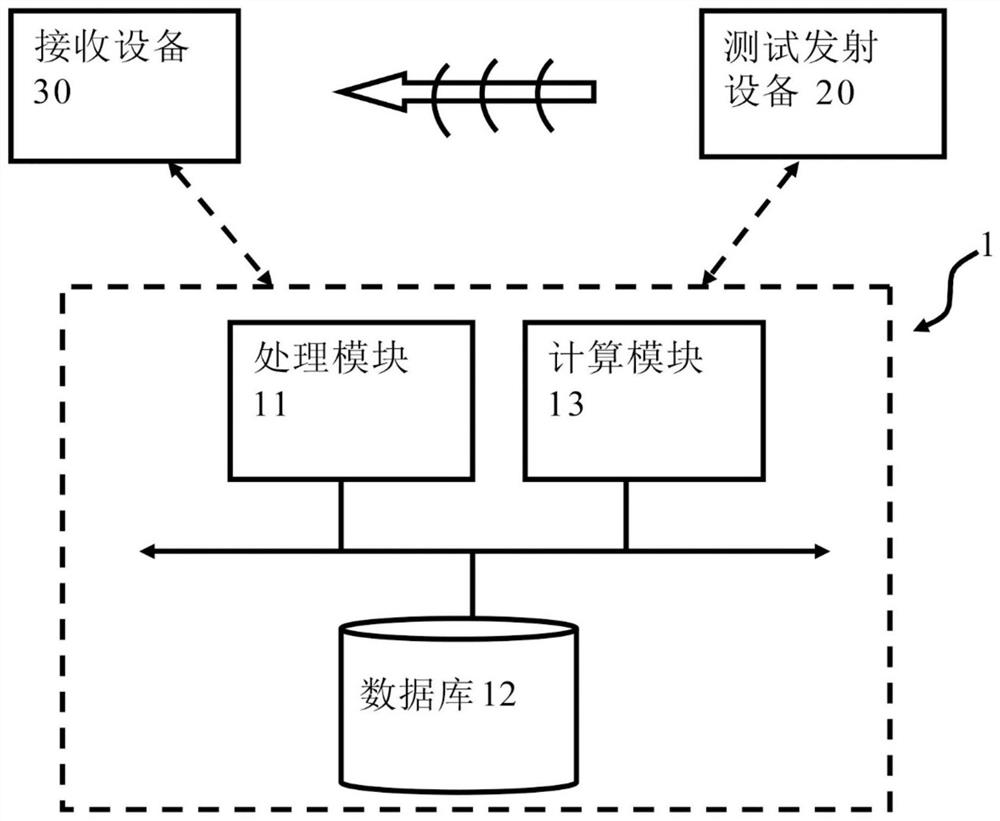
图1本发明的动态功率定位系统进行设定的系统架构图;
图2本发明的数据设定流程的步骤流程图;
图3本发明的动态功率定位系统进行定位的系统架构图;
图4本发明的动态功率定位方法的步骤流程图;
图5A-5B依照图4,为本发明的动态功率定位方法的机率分布相关示意图。
其中,附图标记
动态功率定位系统 1
处理模块 11
数据库 12
计算模块 13
测试发射设备 20
接收设备 30
待测定位设备 40
设备位置 41
已知位置设备 50、51、52、53
机率分布平面 A1、A2、A3、A4、A5、A6、A7、A8、A9
计算的机率分布平面 B1、B2、B3
最终机率分布平面 C1
具体实施方式
为能更了解本发明的技术内容,特举较佳具体实施例说明如下。
请先参考图1是本发明的动态功率定位系统进行设定的系统架构图。
于本发明的一实施例中,动态功率定位系统1包括一处理模块11、一数据库12及一计算模块13,彼此之间是互相电性连接。动态功率定位系统1用以于一空间内利用已知位置设备50(如图3所示)找出一待测定位设备40的一设备位置。而在找出待测定位设备40前,该动态功率定位系统1还可以先利用测试发射设备20及接收设备30来建立所需的数据,但本发明并不限于此。其中测试发射设备20、接收设备30、待测定位设备40及已知位置设备50皆可发送及接收无线信号,此无线信号可以为蓝牙信号,且测试发射设备20、接收设备30、待测定位设备40及已知位置设备50也可为相同或不同的家电设备、电脑设备或移动装置等,但本发明并不限于此。
需注意的是,动态功率定位系统1具有的各模块可以为硬件装置、软件程序结合硬件装置、固件结合硬件装置等方式架构而成,例如可以将一电脑程序产品储存于一电脑可读取媒体中读取并执行以达成本发明的各项功能,但本发明并不以上述的方式为限。此外,本实施方式仅例示本发明的较佳实施例,为避免赘述,并未详加记载所有可能的变化组合。然而,本领域的通常知识者应可理解,上述各模块或元件未必皆为必要。且为实施本发明,亦可能包含其他较细节的现有模块或元件。各模块或元件皆可能视需求加以省略或修改,且任两模块间未必不存在其他模块或元件。处理模块11、数据库12或计算模块13可以设置于同一装置或分别设置于不同装置内,或是可以设置于测试发射设备20、接收设备30、待测定位设备40或已知位置设备50其中任何一种设备内,但本发明并不限于此。
因此,于本发明的一实施例中,该处理模块11是设定该测试发射设备20的多个发射功率,所以测试发射设备20可以发射多个测试信号。接着让接收设备30在与该测试发射设备20相距多个对应距离下,接收该多个测试信号,例如在相隔10厘米、20厘米或是1米到6米间不同的距离下,分别用不同的发射功率发射出不同的测试信号。但本发明并不限于此数值。藉此该处理模块11检测得知该接收设备30所接收的多个测试信号强度,以将该多个测试信号强度及该多个对应距离记录到该数据库12。最后该计算模块13由数据库12的数值计算得到信号强度-距离函数及信号强度-距离标准差函数,并回存于该数据库12中。
接着请参考图2本发明的数据设定流程的步骤流程图。此处需注意的是,以下虽以上述动态功率定位系统1为例说明本发明的数据设定流程,但本发明的数据设定流程并不以使用在上述相同结构的动态功率定位系统1为限。
首先进行步骤201:设定一测试发射设备的多个发射功率,使该测试发射设备在多个对应距离下,对一接收设备发射多个测试信号。
首先该处理模块11是设定该测试发射设备20的多个发射功率。所以测试发射设备20可以发射多个测试信号,接着让接收设备30在与该测试发射设备20相距多个对应距离下,例如在相隔10厘米、20厘米或是1米到6米间不同的距离下,接收该多个测试信号。
其此进行步骤202:检测该接收设备所接收的多个测试信号强度。
其次处理模块11检测接收设备30所接收到的所有信号的信号强度。
接着进行步骤203:记录该多个测试信号强度及该多个对应距离到一数据库。
接着处理模块11将接收设备30所接收到的所有测试信号的信号强度及该测试信号的所对应的对应距离都储存到数据库12内。
最后进行步骤204:计算得到一信号强度-距离函数及一信号强度-距离标准差函数,并回存于该数据库。
最后该计算模块13根据上述的所有信号的信号强度及该信号的所对应的对应距离进行计算,就可以针对每个不同的发射功率计算得到信号强度-距离函数及信号强度-距离标准差函数,以得知接收设备30所接收到的信号强度与测试发射设备20之间距离的关系及其标准差。藉此可回存于该数据库12中。如此一来,即可完成本发明的数据设定流程。
接着请参考图3本发明的动态功率定位系统进行定位的系统架构图。
在数据库12中建立信号强度-距离函数及信号强度-距离标准差函数后,动态功率定位系统1就可以利用已知位置设备50在空间内找出一待测定位设备40的一设备位置。需注意的是,本发明的一实施方式中虽然利用直接先执行数据设定流程的方式来得知信号强度-距离函数及信号强度-距离标准差函数,但本发明并不限定每次都要执行数据设定流程来重新在数据库12内建立信号强度-距离函数及信号强度-距离标准差函数。该些信号强度-距离函数及信号强度-距离标准差函数可以预先设定于待测定位设备40或已知位置设备50之内。
如此一来,该处理模块11控制该待测定位设备40以多个发射功率发射多个定位信号,使该多个已知位置设备50接收该多个定位信号,并记录下该多个定位信号强度、多个对应接收时间及多个已知位置设备50的位置到该数据库12。多个已知位置设备50还会接收该待测定位设备40的一识别码,藉以辨识待测定位设备40。此识别码也会储存于数据库12中。藉此,该处理模块11找出所接收的该多个定位信号中信号强度较大设备,例如该已知位置设备51、52、53。最后该计算模块13就可以由已知位置设备51、52、53的位置再根据该信号强度-距离函数及该信号强度-距离标准差函数以找出待测定位设备40的设备位置。
而关于找出待测定位设备40的设备位置的详细方法请参考图4本发明的设备定位流程的步骤流程图。
首先进行步骤401:控制该待测定位设备以多个发射功率发射多个定位信号,使该多个已知位置设备接收该多个定位信号。
首先当待测定位设备40进入一空间时,处理模块11要先控制待测定位设备40以不同的发射功率发射出定位信号,如此一来,不同的已知位置设备50就可以接收到待测定位设备40的定位信号。多个已知位置设备50还会接收该待测定位设备40的识别码。
其次进行步骤402:记录该多个定位信号强度、多个对应接收时间及该多个已知位置设备的坐标。
由于待测定位设备40是以不同的发射功率发射出定位信号,所以在已知位置设备50接收定位信号后,已知位置设备50会将所有的定位信号、其对应接收时间及以及已知位置设备50的坐标传送回数据库12中。
再进行步骤403:找出所接收的该多个定位信号中信号强度较大的该已知位置设备。
处理模块11会从数据库12的数据中找出多个定位信号中有接收到信号强度较大的该已知位置设备51、52、53。
接着进行步骤404:根据该信号强度-距离函数及该信号强度-距离标准差函数得到设备的多个不同功率下的多个机率分布平面。
接着就计算模块13可以根据该多个定位信号的强度、该多个对应接收时间及该强度较大的该已知位置设备查询该信号强度-距离函数及该信号强度-距离标准差函数,以已知位置设备51、52、53的固定点坐标为圆心,依照信号强度-距离函数求得此信号强度下的距离,即设定此距离为基础半径。再以信号强度-距离标准差函数求得此信号强度下的距离标准差,即设定此标准差做为半径调整的依据。藉此计算出已知位置设备51、52、53在不同功率下的多个机率分布平面。
在此请同时参考图5A-5B依照图4,为本发明的设备定位流程的机率分布相关示意图。
例如在此实施方式中,可以在高、中、低功率下,得到已知位置设备51、52、53接收的定位信号所可能的9个机率分布平面A1到A9,其中机率分布平面A1到A3分别为已知位置设备51、52、53在高功率下的机率分布,机率分布平面A4到A6分别为已知位置设备51、52、53在中功率下的机率分布,机率分布平面A7到A9分别为已知位置设备51、52、53在高功率下的机率分布。
再进行步骤405:将该多个机率分布平面相乘后,得到一最终机率分布平面。
接着计算模块13将9个机率分布平面A1到A9相乘,即机率分布平面A1到A3先相乘得到计算的机率分布平面B1,机率分布平面A4到A6相乘得到计算的机率分布平面B2,机率分布平面A7到A9相乘得到计算的机率分布平面B3。最终将计算的机率分布平面B1到B3相乘就可以得到最终机率分布平面C1。
最后进行步骤406:于该最终机率分布平面中找出最大机率位置,以设定为该待测定位设备的该设备位置。
最后计算模块13从最终机率分布平面C1中找出最大机率位置,将最大机率位置设定为该待测定位设备40的该设备位置41,就可以得知待测定位设备40的坐标。
此处需注意的是,本发明的动态功率定位方法并不以上述的步骤次序为限,只要能达成本发明的目的,上述的步骤次序亦可加以改变。
藉由本案的动态功率定位方法及动态功率定位系统1,即可有效地找出待测定位设备40的位置,不须装设太多的额外感应模块。
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
- 动态功率定位方法及其动态功率定位系统
- 射频功率放大器动态功率调整装置以及动态功率调整方法