用于控制风力涡轮机的方法以及对应的风力涡轮机
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及用于控制风力涡轮机的方法,并且涉及对应的风力涡轮机。
背景技术
风力涡轮机是众所周知的,并且进一步开发风力涡轮机的任务之一是提高风力涡轮机的效率。效率取决于风速,并且特别地取决于风力涡轮机适应于当前风速的充分程度。
一个普遍的问题是测量风速要么不是很精确要么就是昂贵的。因此,通常使用在不测量风速的情况下控制风力涡轮机的操作模式的方法。潜在的想法是,这样的风能设备是好的风传感器。因此,可以仅基于旋转速度和产生的功率来控制风力涡轮机。因此,这两个值可以用于设定与当前风况相匹配的操作点。替代使用所产生的功率地或附加于使用所产生的功率,还可以使用发电机转矩。
然而,这具有的缺点是,风速不是直接已知的,并且因此,基本上仅将设定操作点认为是对于当前风况的最佳操作点,然而,该当前风况是不能直接知道的。
欧洲专利局已经在本申请的优先权申请中检索到以下现有技术:WO 2009/153614A2,US 5 155 375 A,EP 3 158 190A1,US 2012/078518 A1,EP 3 250 820A1,BeheraAnshu等人:“Multi-objective Optimal Tuning of the Multi-loop Pitch ControlSystems of a Wind Turbine(风力涡轮机的多回路桨距控制系统的多目标最佳调节)”,2018年度美国控制会议(ACC),AACC,2018年6月27日(2018-06-27),页码3068-3073,XP033384579,EP 2 292928 A2以及CA3 011 771 A1。
因此,本发明的目的是解决上述问题。特别地,本发明的目的是改善风力涡轮机的操作。应提供作为相对于已知解决方案的替代性解决方案的至少一种解决方案。
发明内容
根据本发明,提出了根据权利要求1的一种方法。该方法涉及用于控制风力涡轮机。所控制的风力涡轮机具有发电机和空气动力学风轮,其中该发电机具有能够控制的发电机转矩,该空气动力学风轮具有风轮叶片,风轮叶片具有能够调节的桨距角。空气动力学风轮根据风速以可变的风轮转速驱动发电机。因此,所建议的控制方法的基础是具有能够调节的风轮叶片以及可变的风轮转速的风力涡轮机。
该方法包括以下步骤:当风速低于预定的额定风速时,使风力涡轮机以亚额定模式操作;以及当风速处于预定的额定风速或高于预定的额定风速时,使风力涡轮机以额定模式操作。因此,至少区分了这两种不同的操作模式,即,对于小的风速为亚额定模式,并且对于较高的风速、特别是对于额定风速的风速或高于额定风速的风速为额定模式。额定模式也可以表示为额定状态或满载模式。亚额定模式也可以表示为亚额定状态或部分负载模式。
该方法还建议估算风速,并且根据估算的风速使风力涡轮机以亚额定模式或额定模式操作。因此,基于估算的风速来确定风力涡轮机是以亚额定模式操作还是以额定模式操作。对风速的估算可以涉及风力涡轮机的操作状况、比如所产生的功率和旋转速度。尽管对风速的估算的这种方法还可以避免直接测量风速,但是确定了对于风速的值,并且该风速的值可以用于操作和控制风力涡轮机。通过使用这样的风速值,将具有风况的直接信息,并且使得控制方法能够更好地使控制适应于风况。估算的风速也可以用于诊断和统计目的。
使用估算的风速代替使用用于设定操作点的风轮转速或所产生的功率的一个优点是,风轮转速和发电机功率取决于所选的操作点,并且因此这种方法基本上需要平衡的状态,而估算风速是易于获得的。
因此,使用估算的风速避免了直接测量,而且还避免了未将风速作为控制值进行考虑。以这种方式,可以相当精确地完成在亚额定模式与额定模式之间的切换,并且因此可以选择最适当的操作模式。同样重要的是要指出,一方面在亚额定模式下控制风力涡轮机与另一方面在额定模式下控制风力涡轮机是完全不同的,下面将对此进行描述,并且因此对于在这两种操作模式之间进行选择的良好标准可能是非常重要的,以便挑选最佳操作模式。
根据另一方面,建议当操作模式从亚额定模式向额定模式改变或从额定模式向亚额定模式改变时,使风力涡轮机以瞬态模式操作。这也应取决于估算的风速。因此,建议根据估算的风速使风力涡轮机以亚额定模式、瞬态模式或额定模式操作。因此,估算的风速是决定选择所述三种模式中的哪个模式的基础。
亚额定模式特别涉及这样的模式,在该模式下,没有足够的风来使风力涡轮机以风力涡轮机的额定功率水平操作。因此,在亚额定模式下,风力涡轮机操作意在将风能设备控制控制成使得产生尽可能多的电力。
在额定模式下,风力涡轮机特别地以额定风速或大于额定风速进行操作,并且因此,操作控制基本上意在将输出功率保持在额定水平处,以便避免对风力涡轮机造成任何短期或长期损害。一种重要的控制特征是调节风轮叶片的叶片角,使得输出功率不超过或至少不明显超过额定功率。
然而,在瞬态模式下,风速几乎处于额定风速,而风轮叶片尚未变桨,因此风轮叶片承受最大风力。因此,当从亚额定模式切换至额定模式时,风轮叶片在切换范围中承受最大负载。为了考虑此范围内的该最大负载,建议所述瞬态模式。为了在适当的风速下启用该瞬态模式,建议使用估算的风速来用于选择瞬态模式。
根据另一方面,该方法还包括以下步骤:
-测量风轮转速,
-在亚额定模式下
-根据所测量的风轮转速来确定桨距角的设定值,和/或
-基于所测量的风轮转速来确定发电机转矩设定点。
-根据桨距角的设定值调节风轮叶片的桨距角,和/或
-根据所确定的转矩设定点调节发电机转矩。
因此,建议将测量风轮转速作为第一步。进一步的步骤涉及亚额定模式。并且因此,根据一个方面,根据所测量的风轮转速来确定桨距角的设定值。因此,在亚额定模式下,桨距角不是固定的。这与在亚额定模式下操作风力涡轮机的公知方法相反。常规方法建议具有最佳桨距角,该桨距角对于整个亚额定模式而言是最佳的。
然而,根据本发明,认识到的是,即使在亚额定模式下,也可以通过调节桨距角来改善风力涡轮机的操作。为了调节桨距角而输入的值是所测量的风轮转速。这具有的优点是,至少与风速变化相比,风轮转速可以被非常精确地测量,并且风轮转速还具有较少或较小的波动。
替代性地,或附加地,根据所测量的风轮转速来调节发电机转矩。因此,至少除其他事物之外,通过发电机转矩设定点和风轮转速来限定操作点。发电机转矩可以通过控制由发电机所产生的定子电流来进行调节。然而,在使用具有能够控制的励磁的发电机的情况下,也可以通过使用这种励磁控制来调节转矩。
如果根据所测量的风轮转速来确定并调节桨距角和发电机转矩,则是特别有利的。以此方式,可以找到用于操作风力涡轮机的足够的操作点,并且在亚额定模式下设置该操作点。因此,可以通过实际风轮转速、实际桨距角以及实际发电机转矩来限定亚额定模式下的操作点。以这种方法使用了至少两个参数、即桨距角和发电机转矩来寻找这种最佳操作点。在稳定的操作点中,旋转速度、发电机转矩以及所产生的功率在物理上相互关联。因此,也可以使用所产生的功率来代替设定发电机扭矩。但是,优选的是设定发电机转矩,因为发电机转矩是发电机操作点的更直接的参数。另外重要的是要指出,风轮转速、发电机转矩与所产生的功率之间的直接相互关系仅在稳定的操作点上给出。每当风轮转速变化时,这三个参数就不再直接相互关联,因为在这种情况下,还必须考虑风轮的惯性。
根据一个方面,至少在亚额定模式下,基于风轮转速值与桨距角值之间的预定关系来确定桨距角的设定值。因此,这种关系根据已知特征或根据预先完成的模拟来预先确定,并且使用此预先确定的已知关系来确定对于当前操作点的桨距角的特定设定值。优选地,可以使用查找表。在这种查找表中,可以存储用于多个风轮转速值的所述预定关系。因此,为了确定桨距角的设定值,从存储用于特定风轮转速的所述查找表中获取这种桨距角。对于风轮转速用的查找表中的两个相邻值之间的操作点,可以通过插值来得到中间值。
优选地,发电机设计为直驱式同步发电机,特别是具有永磁体的发电机。对于这种永久励磁的直驱式同步发电机,可以通过控制所产生的定子电流来调节发电机转矩。这种具有永久励磁的直驱式同步发电机避免了用于控制励磁的任何功率损耗。
根据一个方面,至少在亚额定模式和额定模式下,对风速进行估算,并且基于估算的风速来控制空气动力学风轮的风轮推力,以便限制最大风轮推力或最大风轮推力变化。这尤其是以基于估算的风速来确定风轮推力设定点的方式执行。
因此,进一步建议使用估算的风速、即风轮推力来控制风力涡轮机的另一状态,以便控制风力涡轮机的操作或以便于控制。风轮推力是风力涡轮机上的负载的至少一个重要指示。为了避免任何过载,风轮推力和附加地或替代性地风轮推力变化就最大值而言受到限制。这样的限制或多个限制可以特别地形成用于控制风力涡轮机的辅助条件。特别地,可以基于风轮转速通过调节发电机转矩和桨距角来控制风力涡轮机,但是另外,还对风轮推力或风轮推力变化的所述极限进行观察。因此,如果达到或超过这些极限,则控制可以对此作出反应以便降低风轮推力或风轮推力变化,并且这种降低风轮推力或风轮推力变化的控制可能会否决现有的操作点的控制。
限制这种风轮推力或风轮推力变化的一种优选的可能性是确定风轮推力设定点。这样的风轮推力设定点可以低于给定的最大风轮推力值,以便具有到达最大极限的安全距离。对于小的风速并且因此对于小的估算风速而言,这种安全距离可以较小。对于湍流较小或没有湍流的风速并且对因此湍流较小或没有湍流的估算风速而言,该安全距离也可以较小。另一方面,对于高的风速和/或具有高湍流的风速,该安全距离可以较大,并且因此可以相应地选择风轮推力设定点。风轮推力设定点也可能会影响风轮推力变化。高风轮推力处的操作点也可能是高风轮推力变化的对象。
优选地,如所解释的这种风轮推力限制也可以建议用于瞬态模式。
根据另一方面,至少在额定模式和/或瞬态模式下,当操作模式从亚额定模式变化至额定模式时,基于风轮转速设定点来控制风轮转速,并且根据估算的风速来确定风轮转速设定点。因此,对风速进行估算,并且根据估算的风速确定风轮设定点。然后,基于所述风轮转速设定点来控制风轮转速,即风轮转速基本上被控制成达到风轮转速设定点。然而,也可能的是,用于控制风轮转速的控制不一定以具有零稳定精度为目标,而是可以接受小的偏差,如通常对于P控制而言所知的那样。然而,也可以使用PI控制以便避免风轮转速与风轮转速设定点之间的任何差异。
这样的控制在瞬态模式下是特别地有利的,因为在瞬态模式下,风轮转速可以低于额定风轮转速。因此,风轮转速尚未固定。为了提供风轮转速设定点并基于这样的风轮转速设定点控制风力涡轮机,可以调节发电机转矩以及桨距角,至少调节这些值中的任一者。这样的控制风轮转速的控制概念和瞬态模式具有将风力涡轮机的操作点从亚额定模式导引至额定模式的优点。以这种方法,将风力涡轮机的操作点精确地引导在该临界范围内。如上所述,通过风作用于风力涡轮机、至少作用于风轮叶片上的负载可以在将要进入额定模式之前具有其最大值。因此,建议将风力涡轮机严密地控制在该临界范围内。
然而,也可以在额定模式下使用这样的利用风轮转速设定点进行的对风轮转速的控制。在额定模式下,风力涡轮机通常可以被控制成使得风轮转速处于额定风轮转速。然而,在特定条件或特定范围内可以选择不同的风轮转速设定点,特定条件或特定范围比如为:在额定模式开始时、即接近亚额定模式、或在额定模式结束时、即接近暴风雨模式,在该接近暴风雨模式处,风速接近暴风雨。
特别是对于高于额定风速但是不高于额定风速太多的风速并且因此对于高于额定风速但是不高于额定风速太多的估算风速,风轮转速可以高于额定风速。特别地对于高于额定风速至多达30%的风速,可以选择高于额定风轮转速的风轮转速。然而,另一种或另外的可能性是,在风速略高于额定风速时,使风轮转速处于额定风轮转速并增加风轮转速,即增加风轮转速的设定点。特别地,对于高于额定风速达10%的估算风速,风轮转速可以是额定风轮转速,而对于在高于额定风速10%达至高于额定风速30%的范围内的风速,风轮转速并且因此风轮转速设定点高于额定风轮转速。对于更高的风轮转速,风轮转速可能再次处于额定风轮转速,即对于高于额定风速30%的风速,可以将风轮转速设定点设定成额定风轮转速。
根据另一方面,至少在额定模式和/或瞬态模式下,基于风轮功率设定点来控制风轮功率,并且根据估算的风速来确定风轮功率设定点。风轮功率是作用在风轮上的空气动力学功率。风轮功率可以借助于风轮转速测量值、桨距角测量值和风速估算值来计算。
特别是对于瞬态模式,风力涡轮机能够以这种方式被非常精确地控制在此临界范围内。估算的风速是用于该控制的输入值。在该控制概念的基础上还在于这样的构思,即在某些风速下可以产生的风轮功率是众所周知的。因此,如果根据估算的风速确定风轮功率设定点,则假定这样的风轮功率设定点是对应风速的适当操作点。因此,风力涡轮机也可以以这样的风轮功率设定点被良好地控制。
在额定模式下,风轮功率通常设定成额定功率。但是,根据特定条件或范围,超过该额定功率或保持该功率低于该额定功率可能是有意义的。特别是对于略高于额定风速的风速,特别是在高于额定风速10%与30%之间的范围内,选择高于额定功率的风轮功率可能是有利的。
优选地,基于估算的风速来控制风轮转速和风轮功率。因此,对风速进行估算,并且基于该风速来选择风轮转速设定点以及风轮功率设定点。因此,以由风轮转速和风轮功率限定的操作点来控制风力涡轮机。一种可能性是基于查找表来控制发电机转矩。查找表的输入可以是风轮转速。
根据一个方面,为了启动风力涡轮机,基于风轮转速值与桨距角值之间的预定关系来确定桨距角的设定值。一旦风速高于启动风速,则启动风力涡轮机。此风速可以是估算的或测量的。风速的确切值就不是很重要,只要很明显地具有足够的风来启动风力涡轮机即可。在那种情况下,并且如果满足了任何其他额外条件,则风轮叶片基本上从被动或顺桨位置或从空转桨距角向操作桨距角变桨。这被控制成使得桨距角减小,从而导致如果风轮空转则空气动力学风轮开始运动或开始更快地运动。因此,产生风轮转速,并且该风轮转速是根据风轮转速值与桨距角值之间的预定关系产生的,该桨距角值用作导致新桨距角的输入值。这种新的桨距角再次导致风轮转速的进一步增加,并且因此还产生叶片角的新的设定值等。以这种方法,可以控制启动过程,而不仅仅是将风轮叶片旋转到具有特定叶片角的操作位置。
特别地,这通过使用查找表来完成,其中,桨距角随着风轮转速的增加而减小。当然,除了使用查找表之外,还可以使用分析函数或描述桨距角随着风轮转速的增加而减小的这种关系的其他方式。
特别地,建议以大于20°的空转桨距角启动,直到已经达到小于10°的操作桨距角。因此,在不考虑风轮转速的情况下可以首先将桨距角转变成空转桨距角,但是一旦空转桨距角达到或降低,就根据增加的风轮转速来对桨距角进行任何进一步改变。
如果使用查找表,则还可以使用任何中间值,包括查找表中的现有值之间的插值。
根据另一方面,建议使用以下步骤中的至少一者或以下所有步骤:
–对在亚额定模式下控制桨距角,基于桨距角设定点来确定桨距角桨距率设定点,
–对于至少在额定模式下控制风轮转速,基于风轮转速设定点来确定风轮转速桨距率设定点,
–对于至少在额定模式下控制风轮功率,基于风轮功率设定点来确定风轮功率桨距率设定点,以及
–对于控制风轮推力,基于风轮推力设定点来确定风轮推力桨距率设定点。
因此,此概念的原理是提供桨距率设定点,以便控制所有所述值,即使用桨距率设定点来控制桨距角、控制风轮转速、控制风轮功率以及控制风轮推力。对于这些控制值中的每一者,确定不同的桨距率设定点。因此,必须将多个桨距率设定点付诸实践。特别地,一项任务可能是将多个桨距率设定点合并成一个桨距率设定点。一种简单的方法是采用最大的桨距率设定点。然而,优选地,每个桨距率设定点、即桨距角桨距率设定点、风轮转速桨距率设定点、风轮功率桨距率设定点以及风轮推力桨距率设定点具有不同的优先级。特别地,风轮推力可以具有最高优先级,但是风轮推力也可以仅限定最大桨距率设定点。因此,风轮推力桨距率设定点可以根据风轮推力桨距率设定点的绝对值仅限定上限。当然,如果风轮推力桨距率设定值是负值,则任何桨距率都不应低于该负值。
根据一个实施方式,风轮推力桨距率设定点以风轮推力桨距率设定点通过风轮推力桨距率设定点的绝对值来限定最大值的方式而总是相关的。除此之外,叶片角还由其余的桨距率设定点来控制。在亚额定模式的情况下,除了风轮推力桨距率设定点之外,仅桨距角桨距率设定点可能是相关的。根据此实施方式,风轮转速桨距率设定点以及风轮功率桨距率设定点被禁用。在另一方面,在额定模式期间,桨距角桨距率设定点可能被禁用。如果要同时考虑风轮转速桨距率设定点和风轮功率桨距率设定点,则可以选择两者的算术值。
然而,根据关于一些实施方式解释的以上概念,桨距率形成用以控制风力涡轮机的主要控制值。
根据一个方面,风轮转速桨距率设定点和风轮功率桨距率设定点以加权函数相加在一起。
根据一个方面,基于包括下述各者的列表中的至少一个输入变量或所有输入变量来调节桨距角:
-所测量的桨距角,
-桨距角桨距率设定点,
-风轮转速桨距率设定点,
-风轮功率桨距率设定点,以及
-风轮推力桨距率设定点,其中,特别地
-风轮推力桨距率设定点提供了最小极限,该最小极限具有不能降低的绝对值。
特别地,基于所测量的桨距角并基于一个或多个桨距率设定点来调节桨距角。使用所测量的桨距角并因此使用当前的桨距角为每个调节步骤提供了良好的启动位置,以便更好地将调节过程朝向新的桨距角控制。
除此之外,借助于控制桨距率来控制对桨距角的调节。因此,可以基于桨距率设定点来控制或设定这样的桨距率,其中,桨距率设定点可以来自于多个桨距率设定点。
特别地,风轮推力桨距率设定点提供最小值,以便避免任何太大的风轮推力。以这种方式,可以避免过高的机械负载。考虑风轮推力桨距率设定点和至少一个另一桨距率设定点的一种可能性是,基本上使用该另一桨距率设定点来控制对叶片的调节,而仅考虑风轮推力桨距率设定点作为极限。因此,只要其余桨距率设定点高于风轮推力桨距率设定点,则风轮推力桨距率设定点就是不想关的。以此方式,风轮推力桨距率设定点在发生阵风的情况下可以指令最小桨距率,以便使叶片快速变桨避开风。因此将忽略任何更小的变桨率设定点,以避免叶片将太慢地变桨避开风。
根据另一方面,在前馈控制中基于风轮功率设定点来控制风轮功率。根据一个方面,该前馈控制还可以基于包括下述各者的列表中的至少一个输入变量或所有输入变量:
-所测量的风轮转速,
-所测量的桨距角,以及
-估算的风速。
因此,避免了反馈回路,并且特别地仅基于所测量的风轮转速、所测量的桨距角以及所估算的风速来调节风轮功率。特别地,这三个变量可以非常清楚地限定操作点并且因此可以作为风轮功率的良好基础。然而,即使使用了前馈控制,此控制也可以是动力学过程,或者可以将风轮功率设定点清楚地分配至所测量的风轮转速、所测量的桨距角以及所估算的风速的每个特定组合。这可以在查找表中提供,并且对于中间值,可以使用插值。
作为另一方面,建议在前馈控制中基于风轮推力设定点来控制风轮推力。因此,给出了设定点,并且在没有反馈的情况下控制风轮推力。根据一个方面,对风轮推力的这种控制还基于包括下述各者的列表中的至少一个输入变量或所有输入变量:
-所测量的风轮转速,
-所测量的桨距角,以及
-估算的风速。
这三个变量还可以非常精确地限定风轮推力并且因此还可以用于找到风轮推力设定点。如果风轮推力就风轮推力的绝对值而言高于给定的极限并且因此高于风轮推力设定点,则可以减小风轮转速和/或桨距角。所测量的风轮转速和所测量的桨距角与估算风速相结合所产生的新值可以用于提供新的风轮推力设定点或新的风轮推力桨距率设定点。
根据一个方面,建议在亚额定模式下,基于所测量的风轮转速来调节发电机转矩,在瞬态模式下,基于估算的风速,使风轮功率随着风速的增加而增加,并且在额定模式下,在前馈控制中基于估算的风速将风轮功率控制成恒定值,并且另外或替代性地,风轮推力设定点随着风速的增加而减小,并且风轮推力设定点基于估算的风速来设定。
因此,对于亚额定模式、瞬态模式和额定模式分别具有特定的控制概念。在这三种模式之间具有明显的区别,并且每个模式都涉及特别适于每个特定模式的特定概念。此概念的基础在于,在亚额定模式下,风力涡轮机上的负载、特别是风轮上的负载的相关性较小,并且风轮转速是可变的,并且因此为调节发电机转矩提供了良好的基础。在亚额定模式下,还预期风轮转速的经常变化,并且因此发电机转矩与发电机功率成比例。已经发现的是,据此,在亚额定模式下通过调节发电机转矩控制发电机提供了更稳定的控制概念。
在瞬态模式下,风轮转速和输出功率分别接近额定速度或额定功率。与风轮转速的小的变化相比,风轮功率和发电机转矩可能会发生大的变化。因此,对于瞬态模式,建议基于估算的风速使风轮功率随着风速的增加而增加。已经发现的是,估算的风速可以因此为这种调节形成良好的基础。
在额定模式下,功率可以控制成恒定值。已经发现的是,这可以使用前馈控制基于估算风速来进行。因此,使用估算的风速,并且也可以使用所测量的风轮转速和所测量的桨距角,并且这在前馈控制中提供了良好的控制。特别地,可以避免由于反馈回路而引起的任何可能的振荡。另外或替代性地,风轮推力设定点还可以基于估算的风速来设定。这也可以额外地考虑所测量的风轮转速和所测量的桨距角。但是,也可以使用前馈控制来避免反馈回路的振荡。
本发明还涉及一种风力涡轮机。这样的风力涡轮机具有:
-发电机,该发电机具有能够控制的发电机转矩,以及
-空气动力学风轮,该空气动力学风轮具有风轮叶片,风轮叶片具有能够调节的桨距角,其中
-空气动力学风轮适于根据风速以可变的风轮转速驱动发电机,还包括:
-涡轮机控制装置,该涡轮机控制装置用于当风速低于预定的额定风速时使风力涡轮机以亚额定模式操作,并且用于
-当风速处于预定的额定风速或高于预定的额定风速时,使风力涡轮机以额定模式操作,
-估算器,该估算器用于估算风速,并且其中
-涡轮机控制装置适于根据估算的风速使风力涡轮机以亚额定模式或额定模式操作。
因此,涡轮机控制装置基本上如关于上面所解释的那样用于控制风力涡轮机的方法的至少一个实施方式或方面中所描述的那样操作风力涡轮机。因此,还提供了一种用于估算风速的估算器。因此,估算的风速可以用于控制风力涡轮机。涡轮机控制装置特别地可以设置为微控制器。估算器也可以设置为微控制器,并且将涡轮机控制装置和估算器组合在一个装置中、特别地在组合一个微控制器中可以是一种选择。涡轮机控制可以实现为在这种微处理器上执行的一种特定的控制程序。估算器可以实施为那种微处理器或不同微处理器上的另一控制程序。当然,这些程序可以是相互连接的。特别地,可以将估算的风速提交给涡轮机控制装置,以便形成用于涡轮机控制装置的输入变量。涡轮机控制装置还可以产生输出值,比如可以产生由估算器使用的风轮功率。
可以根据已知的概念来提供用于估算风速的估算器。特别地,估算器可以设计为如专利申请WO 2017/144631 A1中所描述的那样。
关于以上所解释的根据至少一个实施方式或方面的控制风力涡轮机的方法所解释的任何优点也能够适用于所提出的风力涡轮机。
附图说明
现在可以基于考虑附图的实施方式通过示例来解释本发明。
图1以立体图示出了风能设备。
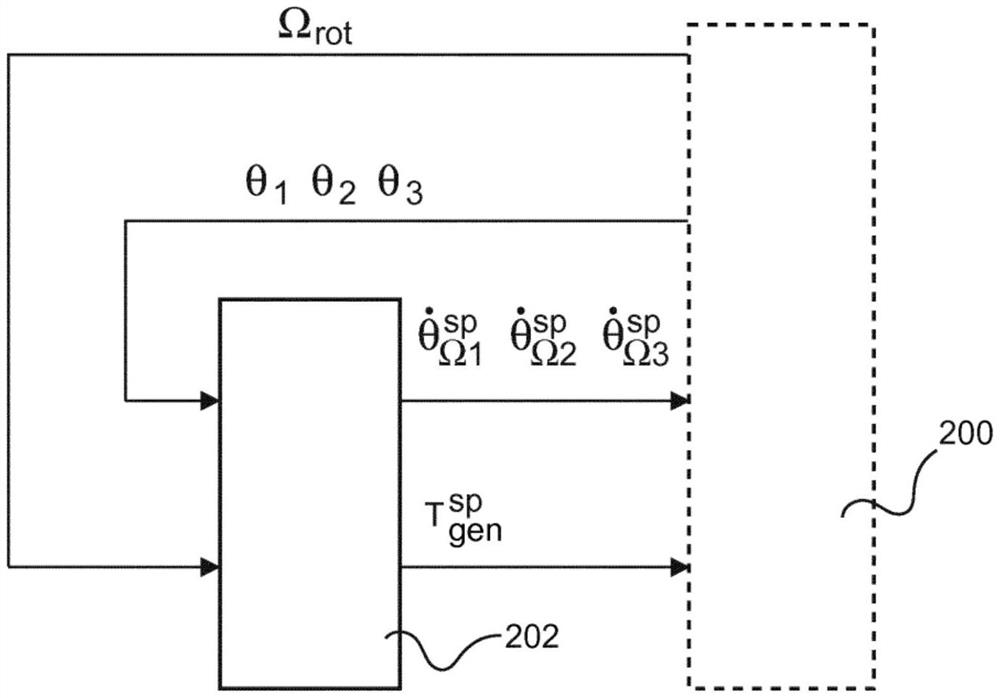
图2是根据一个方面的风力涡轮机控制器的结构示意图。
图3是更详细的根据图2的风力涡轮机控制器的结构示意图。
图4是更详细的根据图3的风力涡轮机控制器的结构示意图。
图5是更详细的根据图4的风力涡轮机控制器的结构示意图。
具体实施方式
图1示出了包括塔架102和机舱104的风能设备100。在机舱104上布置有具有三个风轮叶片108和旋转器110的风轮106。风轮106设置成在操作期间通过风而进行旋转运动,并因此驱动机舱104中的发电机。
图2以一定的示意性概述图示了根据一个方面的控制构思。因此,存在基本上代表风力涡轮机的涡轮机框200。为了根据风力涡轮机框200来控制风力涡轮机,示出了风力涡轮机控制器202,风力涡轮机控制器202接收所有的三个叶片桨距角θ
基于所测量的叶片角度和所测量的风轮转速,风力涡轮机控制器202针对三个风轮叶片中的每个风轮叶片输出桨距率设定点
图3示出了图2的一些更多详细信息,并且图2的风力涡轮机控制器202在图3中用虚线图示为矩形。
因此,风力涡轮机控制器包括发电机转矩控制器304和桨距率控制器306。发电机转矩控制器304仅接收风轮转速Ω
桨距率控制器306还接收风轮转速Ω
在图4中,示出了根据图3的桨距率控制器306的进一步细节。以与图3中相同的方式图示了涡轮机框200以及发电机转矩控制器304。然而,根据图3的桨距率控制器306被分成桨距约束框408和各自以单个桨距率设定点进行输出的若干个框。因此,设置有桨距角控制器410,桨距角控制器410输出桨距率设定点以控制桨距角。该桨距率设定点由桨距角桨距率设定点表示。为了控制风轮转速,设置有风轮转速控制器412,风轮转速控制器412输出桨距率以便控制风轮转速。由风轮转速控制器412输出的桨距率设定点由风轮转速桨距率设定点来表示。
为了控制风轮功率,设置有风轮功率控制器414,风轮功率控制器414输出桨距率设定点以便控制风轮功率。该桨距率设定点被称为风轮功率桨距率设定点。
为了控制风轮推力,特别是为了限制风轮推力,设置有风轮推力控制器416。同样,风轮推力控制器416还通过输出桨距率设定点来控制风轮推力。该桨距率设定点被称为风轮推力桨距率设定点。
将所有的四个桨距率设定点——即,桨距角桨距率设定点、风轮转速桨距率设定点、风轮功率桨距率设定点以及风轮推力桨距率设定点——插入桨距约束框408中。桨距约束框408基本上为每个叶片产生要提交给涡轮机框200的一个桨距率设定点。因此,由桨距约束框408输出的桨距率设定点通常是输入到桨距约束框408中的所述四个桨距率设定点的结果。
然而,桨距角控制器410、风轮转速控制器412、风轮功率控制器414以及风轮推力控制器416可能不会同时全部操作。风轮推力控制器416提供最小值。然而,特别地,风轮推力桨距率设定点可以只是极限。因此,由图5的风轮推力约束框518输出的最终桨距率设定点应该总是处于风轮推力桨距率设定点或大于风轮推力桨距率设定点的值。换句话说,如果任何桨距率设定点下降并达到风轮推力控制器416的此极限,即,下降至低于风轮推力桨距率设定点,则该极限将否决任何其他桨距率设定点,并避免桨距率设定点变得更小。
桨距角控制器410优选地仅在亚额定模式期间启用,而风轮转速控制器412和风轮功率控制器414可以仅在瞬态模式和额定模式期间启用。因此,控制概念可以一方面在桨距角控制器410与风轮转速控制器412之间切换以及另一方面在桨距角控制器410与风轮功率控制器414之间切换。
同时考虑风轮转速桨距率设定点和风轮功率桨距率设定点的一种可能性是在加权函数中将这两个桨距率设定点相加在一起。该概念的基本构思是,风轮转速和风轮功率基本上将至少部分地联接,并且因此这两个桨距率设定点也会相似的,至少这两个桨距率设定点通常具有相同的前缀,即两者同时为正或同时为负。
桨距约束框408还考虑由发电机转矩控制器304产生的发电机转矩设定点。桨距约束框408利用风速估算器,并且风速估算器利用发电机转矩设定点。
图5示出了控制结构的进一步详细信息。涡轮机框200和发电机转矩控制器304以与前面图4相同的方式图示出。图5示出了关于如何产生桨距角桨距率设定点、风轮转速桨距率设定点、风轮功率桨距率设定点以及风轮推力桨距率设定点的更多详细信息。也更详细地示出了桨距约束框408。然而,所述四个桨距率设定点仍形成了输入,并且根据图5被输入到风轮推力约束框518中。风轮推力约束框基本上形成一个单个桨距率设定点,并且以将风轮推力桨距率设定点认为是极限的方式来计算。结果被输入到桨距角同步框520中,桨距角同步框520还考虑了所测量的所有叶片的桨距角。
因此,桨距角同步框520输出桨距率设定点同时还考虑到所有测量的桨距角,并将该结果输入到限制框522中。限制框522提供桨距角限制、桨距率限制和桨距加速度限制。因此,如果由桨距角同步框520提供的桨距率设定点以某种方式导致超过了任何所述极限,则桨距率设定点被相应地修改。因此,限制框522考虑了所测量的桨距角,并且还考虑了估算的风速。
在图5中还示出了进一步详细信息,即所测量的桨距角还由桨距角滤波器524进行滤波。所测量的风轮转速也由风轮转速滤波器526进行滤波。
估算的风速由风速估算器528提供。风速估算器接收作为其输入变量的所测量的风轮转速、所测量的桨距角和发电机转矩设定点。风速估算器528基本上是这样工作的,使得找到平衡,根据该平衡,发电机转矩设定点与风轮转矩匹配,该风轮转矩取决于所测量的风轮转速和所测量的桨距角。
风速可以根据风轮转速、桨距角和发电机转矩设定点来进行估算。根据一个方面,可以使用具有作为输入变量的所述三个变量的查找表。
为了计算桨距角桨距率设定点,提供了桨距角框530,桨距角框530将桨距角差转换成桨距率。桨距角差是通过从借助于桨距角设定点框532计算的桨距角设定点减去所测量的桨距角而得到的。这在角度减去框534中完成。桨距角设定点框532仅基于所测量的风轮转速来计算桨距角设定点。
为了计算风轮转速桨距率设定点,提供了风轮转速框536,风轮转速框536接收所测量的桨距角以及转速差,并且基于桨距角以及转速差,风轮转速框536计算风轮转速桨距率设定点。风轮转速差通过在转速减去框538中从风轮转速设定点减去所测量的风轮转速来计算。风轮转速设定点由风轮转速设定点框540来计算,并且风轮转速设定点框540接收作为其输入值的估算的风速。因此,风轮转速设定点仅基于估算的风速来计算。
为了计算风轮功率桨距率设定点,提供了风轮功率框542。用于计算风轮功率桨距率设定点的风轮功率框考虑了所测量的风轮转速、所测量的叶片角以及估算的风速。通过考虑借助于风轮功率设定点框544基于估算的风速计算的风轮功率设定点来直接以及也间接地考虑估算的风速是。如可以看到的,风轮功率桨距率设定点仅通过前馈控制来计算。没有将设定值与对应的测量值、比如角度减去框534或转速减去框538进行比较。因此,风轮功率桨距率设定点由前馈控制确定。
风轮推力桨距率设定点是通过风轮推力框546计算的。风轮推力框还接收作为输入值的所测量的风轮转速、所测量的桨距角以及估算的风速。风轮推力框546还直接和间接地通过由风轮推力设定点框548基于估算的风速确定的风轮推力设定点来接收估算的风速。风轮推力桨距率设定点与风轮功率桨距率设定点一样,也由前馈控制确定,并且因此没有将设定点与测量值进行任何比较。
可以通过以下信息进一步解释本发明或本发明的实施方式。
通常,使用以下首字母缩略词:
NTM:正态湍流模型
P:比例(控制器)
PD:比例微分(控制器)
PDD:比例双微分(控制器)
SUMA:短期未加权移动平均线
LUMA:长期未加权移动平均线
为了电力生产,具有三个叶片的变速风力涡轮机设置有风力涡轮机控制器,其中所述三个叶片具有各自的桨距。风力涡轮机控制器包括发电机转矩和桨距率控制器。涡轮机控制器的目标是使电力生产优化,并且保持在风力涡轮机的设计负荷和声音等级内。优化是指在额定条件下稳定的电力生产以及在亚额定条件下最大限度的电力生产。因此,将目标分成两种控制策略:
-亚额定操作:在亚额定操作时,电力生产是最大化的。
-额定操作:对于额定操作,保持额定的电力生产。
根据一个方面,提出了一种直驱式风力涡轮机,该风力涡轮机配备有用于致动3个叶片的期望桨距率的3个桨距伺服驱动器以及用于致动发电机的期望转矩的功率转换器。
如图2中所示,风力涡轮机控制器为三个桨距驱动器计算桨距率设定点,并为功率转换器计算发电机转矩设定点。用于计算设定点的控制器算法需要以下输入信号:
-所测量的3个叶片的桨距角。
-所测量的风轮的角速率(速度)。
此外,控制器算法还需要:
-作为最大致动发电机功率的发电机功率设定点。
-用以限制风轮转速设定点的风轮转速比设定点。
-用以设置声音降低操作的声音等级降低设定点。
-用以传达涡轮机操作的涡轮机状态。
如图2.2中所图示的,风力涡轮机控制器包括发电机转矩和桨距率控制器。
发电机转矩控制器的详细信息如下:
发电机转矩设定点是借助于风轮转速测量值计算的。发电机控制器以下述3种模式操作:
1.亚额定
对于所测量的风轮转速小于额定发电机速度,发电机将在亚额定的条件下操作。从发电机速度-转矩表中选择小于或等于额定发电机转矩的转矩,使得用于产生可用风轮功率最大化。
2.额定
对于所测量的风轮转速大于或等于额定发电机速度,发电机将在额定条件下操作。计算小于或等于额定发电机转矩的转矩,使得保持额定发电机功率。在额定操作期间,如果满足超额定风力的条件,则转换至超额定功率是可行的。那么,对于所测量的风轮转速大于或等于超额定的发电机速度,则计算小于或等于超额定发电机转矩的转矩,以产生超额定的发电机功率。
3.瞬态
当发电机在额定条件下操作并且所测量的风轮转速降低到低于额定发电机速度时,发电机将切换至瞬态状态。在瞬态模式下,将区分以下子状态:
(a)首先,保持额定发电机转矩并返回至额定操作。
(b)其次,如果(a)不可行,则发电机将返回至亚额定操作。
子状态由一组风轮转速和发电机转矩值定范围。发电机转矩控制器的特征在于进行桥接操作,以避免激发由叶片的塔架通道引起的第一塔架共振频率。桥接操作是通过平稳功能设定的,该平稳功能将发电机扭矩设定点降低到接近于与风轮转速相匹配的第1塔架共振频率。
桨距率控制器的详细信息如下:
如图4中所示,来自图3的桨距率控制器可以分成以下控制器:
-桨距角控制器
-风轮转速控制器
-风轮功率控制器
-风轮推力控制器
如图4中所示,来自控制器的桨距率设定点受到桨距约束。
来自图5的控制器和桨距约束可以解释如下:
来自图4的桨距角控制器使用桨距角设定点θ
令
在电力生产期间,风速
由于估算问题,令f为传递函数。目的是找到估算值,使得估算的风轮(空气动力学)扭矩与重建的风轮(空气动力学)扭矩相匹配。
借助于等式(2)的估算风速:计算出短期未加权移动平均线(SUMA)和长期未加权移动平均线(LUMA)风速:
用于:
N
令f
作为自由上游湍流的表示,借助于LUMA风速计算正态湍流模型方差。正态湍流模型方差满足:
使用I
令
令
风轮转速控制器是比例微分(PD)反馈控制器,该反馈控制器设计成用于干扰抑制,以便保持所要求的风轮转速设定点。对于高于所要求的风轮转速设定点的风轮转速值,干扰抑制是最主要关注的问题。因此,在超过所要求的操作条件时,为风轮(空气动力学)扭矩的桨距角灵敏度函数计算出正态PD增益值。当在所要求的条件下操作时,通过放大正态PD增益值来追求稳定条件,其中该正态PD增益值取决于风轮转矩的桨距角灵敏度函数。对PD增益值的调整称为增益调度。
来自图4的风轮功率控制器使用风轮转速和桨距角测量值Ω
令
令
风轮功率控制器是比例双微分(PDD)前馈控制器,该前馈控制器设计成保留所需的风轮功率设定点。
来自图4的风轮推力控制器借助于风轮转速和桨距角测量值Ω
令
令
根据图5,来自桨距角、风轮转速、风轮功率和风轮推力控制的桨距率设定点受到下述一组约束:
-风轮推力约束
-桨距角同步
-桨距角、桨距率以及加速度限制
在电力生产期间,风轮推力约束将选择桨距率设定点,该桨距率设定点产生最小的风轮推力变化率。
通过P反馈控制器来校正3个叶片的桨距率设定点,使得3个桨距角同步至用于进行同步的至少阈值水平。
为了确定电力生产的操作范围,为桨距角、桨距率和加速度引入了限制。范围由工作桨距(pitch-to-work)和叶片桨距(pitch-to-vane)限制所限定。对于限制的概述,请考虑表2.1。
表1:桨距角、桨距率和桨距加速度限制。
对于额定生产的工作桨距率限制是从预定义的风轮转速–桨距率表中获得的。对于工作桨距角的限制,将最小叶尖速度比率引入桨距角范围。最小叶尖速度比率在叶尖速度比率–最小桨距角表中被转换。
对所测量的桨距角和风轮转速进行滤波操作,以使该桨距角和风轮转速合适于控制动作。滤波器设计成分别抑制来自结构和发电机动力学、叶片和塔架的弯曲模式以及发电机的不平衡运动的干扰。
因此,至少一个方面提出了一种直驱式风力涡轮机,该直驱式风力涡轮机配备有控制系统,以致动三个叶片的期望桨距率并致动发电机的期望转矩。控制系统的风力涡轮机控制器设计成优化电力生产并且设计成处理多个操作目标,并尽可能保证结构完整性。
对于亚额定的电力生产,使用发电机转矩、桨距角以及风轮推力控制器使生产用的可用风轮功率最大化。另外,在额定电力生产时,人们试图通过使用发电机转矩、风轮转速、风轮功率以及风轮推力控制器来保持持额定发电机功率。最后,所有要求的桨距率都受到一组约束。
- 用于控制风力涡轮机的方法以及对应的风力涡轮机
- 用于控制风力涡轮机的控制方法以及包括被配置用于施行所述控制方法的控制装置的风力涡轮机