大蒜鳞芽识别调整装置及调整方法
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种大蒜鳞芽识别调整装置及调整方法,属于农业机械技术领域。
背景技术
大蒜是我国主要的经济作物和出口产品,用途广泛、社会的需求量大。但是由于蒜瓣本身形状不规则,且大蒜品种不一,不同品种之间蒜瓣形状差别较大,同一品种蒜瓣之间形态差异性明显,因此,导致机械化立直种植大蒜困难重重。长期以来主要是依靠人力去逐颗蒜瓣种植,劳动强度大,效率低下,人力成本较高。
近年来大蒜立直种植受到广泛关注,许多科研单位和企业也相继研发出具有定向、立直种植功能的大蒜种植机,但这些机具种植效果受蒜种外形影响较大,且缺少大蒜鳞芽方向识别和调整装置,最终的作业效果均未达到高速作业的标准。
发明内容
为了克服现有大蒜播种机技术的不足,本发明提供了一种大蒜鳞芽识别调整装置及调整方法,能够完成蒜种的定向输送、鳞芽方向识别、鳞芽方向调整等功能,为实现大蒜机械化立直种植提供技术支持。
为实现上述目的,本发明采用以下技术方案:
一种大蒜鳞芽识别调整装置,包括支架、调直输送机构、检测机构、方向调整机构和落种管;调直输送机构、方向调整机构和落种管依次设置在支架上, 检测机构设置在调直输送机构上;调直输送机构与方向调整机构之间通过输送件连通,落种管设置在方向调整机构下方。
所述大蒜鳞芽识别调整装置优选方案,调直输送机构包括输送电机、皮带传动副和调直挡板;
调直挡板设置在皮带传动副上方并位于两侧;
调直挡板通过调直挡板固定板设置在支架上;
调直输送装置包括蒜种调直区和蒜种定向输送区;
蒜种调直区两侧调直挡板距离逐渐缩小,蒜种定向输送区两侧调直挡板之间的距离小于蒜种长度且大于蒜种宽度。
所述大蒜鳞芽识别调整装置优选方案,方向调整机构包括光电传感器、接近开关、转动电机和翻转托盘;
翻转托盘上方两侧设有挡板,且挡板之间的距离小于蒜种长度且大于蒜种宽度;
光电传感器设置在挡板上,用于检测蒜种到位状态;
转动电机设置在支架上并与翻转托盘连接,用于带动翻转托盘翻转;
接近开关设置在支架安装转动电机的一侧并放置在翻转托盘两端,用于检测翻转托盘转动后的到位状态。
所述大蒜鳞芽识别调整装置优选方案,输送件为输送方管,倾斜设置调直输送机构与方向调整机构之间,输送方管截面尺寸与蒜种定向输送区Ⅱ两侧调直挡板的距离相同,输送方管截面尺寸小于蒜种长度且大于蒜种宽度。
所述大蒜鳞芽识别调整装置优选方案,落种管设置在支架上,呈Y型放置在翻转托盘下方。
所述大蒜鳞芽识别调整装置优选方案,检测机构包括一组对射光栅,且竖直设置在调直输送机构上。
一种大蒜鳞芽方向识别调整方法,包括所述的大蒜鳞芽识别调整装置,工作步骤为:
(1)大蒜鳞芽方向识别:
在调直输送机构上的大蒜蒜种经过检测机构整个过程时间为t,在这个过程中采集的光电信号生成数组,数组个数记为N,提取(0,0.3N)和(0.7N,N)这两个区间的数组,即相当于提取沿大蒜长度方向前部30%和后部30%的轮廓数据,通过积分运算,得出沿大蒜长度L方向前部30%部分的轮廓面积S1和后部30%部分的轮廓面积S2,当S1>S2时,后部为大蒜鳞芽部分,当S2>S1时,前部为大蒜鳞芽部分;
(2)大蒜鳞芽方向调整:
根据大蒜鳞芽方向的识别结果,当鳞芽方向在运行方向前端时,翻转托盘向后端翻转;当鳞芽方向在运行方向后端时,翻转托盘向前端翻转;翻转托盘翻转一定角度后蒜种滑入落种管的管口,翻转动作结束后检测翻转托盘是否处于水平状态。
本发明的优点在于:
1.检测机构进行数据采集,根据蒜种前后端截面积的大小判别鳞芽方向。
2.根据鳞芽方向识别结果,控制翻转托盘向不同方向翻转,实现蒜种以鳞芽朝上状态滑入落种管,达到立直种植的目的。
3.通过调节输送电机和转动电机的转速可以调节蒜种之间的距离,达到蒜种粒距调节的目的。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
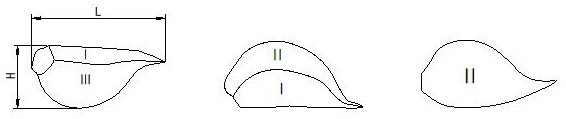
图1为本发明输送过程蒜种出现的三种状态图;
图2为本发明的结构图;
图3为本发明方向调整装置俯视图;
图4为本发明调直输送装置俯视图;
如图所示:1、支架;2、输送电机;3、输送带;4、调直挡板;5、调直挡板固定板;6、检测装置;7、输送方管;8、光电传感器;9、接近开关;10、转动电机;11、落种管;12、翻转托盘。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种大蒜鳞芽识别调整装置,包括支架1、调直输送机构、检测机构、方向调整机构和落种管11;调直输送机构、方向调整机构和落种管依次设置在支架上, 检测机构设置在调直输送机构上;调直输送机构与方向调整机构之间通过输送件连通,落种管11设置在方向调整机构下方。
参考图2及图4,调直输送机构包括输送电机2、皮带传动副3和调直挡板4;
调直挡板4设置在皮带传动副3上方并位于两侧;
调直挡板4通过调直挡板固定板5设置在支架上;
调直输送装置包括蒜种调直区Ⅰ和蒜种定向输送区Ⅱ;
蒜种调直区Ⅰ两侧调直挡板4距离逐渐缩小,蒜种定向输送区Ⅱ两侧调直挡板4之间的距离小于蒜种长度L且大于蒜种宽度H。
参考图3,方向调整机构包括光电传感器8、接近开关9、转动电机10和翻转托盘12;
翻转托盘12上方两侧设有挡板,且挡板之间的距离小于蒜种长度L且大于蒜种宽度H;
光电传感器8设置在挡板上,用于检测蒜种到位状态;
转动电机10设置在支架1上并与翻转托盘12连接,用于带动翻转托盘12翻转;
接近开关9设置在支架1安装转动电机10的一侧并放置在翻转托盘12两端,用于检测翻转托盘12转动后的到位状态。
本实施例中,输送件为输送方管7,倾斜设置调直输送机构与方向调整机构之间,输送方管7截面尺寸与蒜种定向输送区Ⅱ两侧调直挡板的距离相同,输送方管7截面尺寸小于蒜种长度L且大于蒜种宽度H。
本实施例中,落种管11设置在支架1上,呈Y型放置在翻转托盘12下方。
本实施例中,检测机构6包括一组对射光栅,且竖直设置在调直输送机构上。
一种大蒜鳞芽方向识别调整方法,包括所述的大蒜鳞芽识别调整装置,工作步骤为:
(1)大蒜鳞芽方向识别:
a.输送带运送蒜种通过光栅区域,光电信号采样周期T必须大于蒜种通过光栅区的时间t,t =L/v,L为蒜种的长度,该值为取样测量获得的平均值;v为输送带的速度,通过测量输送电机2的转速获得;
大蒜蒜种主要有三个面组成,在输送过程会出现三种状态,如图1,状态1:面Ⅱ为底面与输送带接触;状态2:面Ⅲ为底面与输送带接触;状态3:面Ⅰ为底面与输送带接触。大蒜蒜种通进入光栅区,从蒜种进入光栅区触发光电信号到蒜种离开光栅区,在调直输送机构上的大蒜蒜种经过检测机构整个过程时间为t,在这个过程中采集的光电信号生成数组,数组个数记为N,提取(0,0.3N)和(0.7N,N)这两个区间的数组,即相当于提取沿大蒜长度方向前部30%和后部30%的轮廓数据,通过积分运算,得出沿大蒜长度L方向前部30%部分的轮廓面积S1和后部30%部分的轮廓面积S2,当S1>S2时,后部为大蒜鳞芽部分,当S2>S1时,前部为大蒜鳞芽部分;
(2)大蒜鳞芽方向调整:
根据大蒜鳞芽方向的识别结果,当鳞芽方向在运行方向前端时,翻转托盘12向后端翻转;当鳞芽方向在运行方向后端时,翻转托盘向12前端翻转;翻转托盘12翻转一定角度后蒜种滑入落种管11的管口,翻转动作结束后接近开关12检测翻转托盘12是否处于水平状态。
翻转托盘12两侧挡板上设置光电传感器8,检测区域的长度大于蒜种长度L,蒜种滑入翻转托盘12后处于光电检测区域,如图3,此时检测区域右端的光电传感器不会触发。若蒜种触发最右侧的光电传感器,不论此时蒜种是静止状态还是滑行状态,为了防止蒜种向右滑出翻转托盘12,转动电机10立即动作,具体为:①运行前端为鳞芽部分,翻转托盘12向后端翻转阻止蒜种继续滑动,并将蒜种滑入落种管11左侧的管口;②运行后端为鳞芽部分,翻转托盘12向前端翻转促使蒜种继续滑动,将蒜种滑入落种管11右侧管口。
本发明的装置还具有蒜种粒距调节的功能,具体方式为:
调节输送电机2的转速和转动电机10的转度,使输送动作与翻转动作速度协调,输送带的速度v改变,有序落到输送带上的蒜种之间的距离也改变,v变大蒜种之间的距离增大,v变小蒜种之间的距离减小,经过翻转托盘12翻转滑入落种管11的蒜种之间的时间间隔也随着v的变化而变化,最终通过投种装置播种入土的蒜种之间的距离也随着v的变化而变化,实现蒜种粒距调节的目的。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 大蒜鳞芽识别调整装置及调整方法
- 大蒜鳞芽方向识别调整装置