一种用于井下自动化运输系统的调度管理方法
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及矿井车辆调度技术领域,具体涉及一种用于井下自动化运输系统的调度管理方法。
背景技术
井下的电机车或单轨吊等运输系统是矿井运输的主动脉,运输系统的安全、高效运行是地釆生产的关键环节。运输系统的主要任务是装载、运输井下开采的矿物以及进出井下工作的人员。目前,电机车或单轨吊等运输系统的调度大多为人工调度,部分依靠可编程控制器为主的“信集闭”系统,通过人工操作,由PLC控制道岔、红绿灯等设备状态实现对井下运输车的调度,存在无法及时掌握井下路况信息、只能针对局部进行调度、运输效率低等问题。
随着井下现代开采技术自动化程度的提高,矿山企业面对如何提高工作效率、提高工作安全系数、提高运营效率等现状,对井下运输系统的自动化、信息化的需求也越来越高。为此,针对现有技术中井下交通难以调度与控制,影响煤矿安全生产、降低运输效率、难以事故救援等问题,公开号为CN107780970B的中国专利就公开了《一种矿井下车辆避让调度方法》,其包括:在矿道内设置车辆运行动态和参数接收器,并采集车辆运行参数;根据所述车辆运行参数,使用动态调度方法生成矿井下车辆的调度指令;根据所述调度指令控制矿道内的信号指示装置,引导矿井下车辆的通行与避让。
上述的矿井下车辆避让调度方法也是一种用于井下自动化运输系统的调度管理方法,其能够对矿井下车辆进行避让调度。但申请人发现,对于现有的电机车或单轨吊等运输系统而言,其一般没有车辆驾驶人员,是完全自动化的运输系统,对于这种完全自动化的运输系统需要对各个运输车进行更为全面和细致的全局调度。然而,现有的调度管理方法仅考虑了两车相遇时的避让调度,未考虑各个运输车如何分配以及如何实现运行管理等实际调度的问题,使得现有的调度管理方法难以应用于完全自动化的运输系统。因此,如何提供一种能够实现自动化运输系统全局调度的调度管理方法是急需解决的技术问题。
发明内容
针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种能够实现自动化运输系统全局调度的用于井下自动化运输系统的调度管理方法,从而能够辅助提升自动化运输系统的调度管理效果。
为了解决上述技术问题,本发明采用了如下的技术方案:
一种用于井下自动化运输系统的调度管理方法,包括以下步骤:
S01:获取井下的人员运输量,以及矿物运输量及其对应的存放位置;
S02:根据人员运输量和矿物运输量计算对应的运输车需求量,并结合矿物运输量对应的存放位置计算各个运输车对应的目标运输区域;
S03:根据各个运输车的目标运输区域和井下运动状态生成对应的运输车调度方案,并根据运输车调度方案对各个运输车进行调度管理。
优选的,运输车调度方案包括各个运输车对应的入井顺序方案和出井顺序方案。
优选的,步骤S03中,根据各个运输车的目标运输区域和井下的地图布局信息生成对应的入井顺序方案,并根据入井顺序方案对应调度各个运输车从地面进入井下。
优选的,步骤S02中,还根据人员运输量和矿物运输量计算各个运输车在井下的矿物装载量和人员装载量;
步骤S03中,根据各个运输车在井下的矿物装载量和人员装载量计算各个运输车对应的预测装载时间;然后根据各个运输车的入井顺序方案和预测装载时间生成对应的出井顺序方案;最后根据出井顺序方案对应调度各个运输车从井下返回地面。
优选的,运输车调度方案还包括冲突避让方案;
步骤S03中,根据入井顺序方案或出井顺序方案对应调度各个运输车;然后根据各个运输车的目标运输区域和井下运动状态,以及井下的地图布局信息预测各个运输车对应的车辆动态路径;最后根据各个运输车的车辆动态路径判断运输车之间是否存在车辆冲突:若不存在,则根据入井顺序方案或出井顺序方案继续调度各个运输车;若存在,则生成对应的冲突避让方案以调度对应的运输车进行避让。
优选的,井下运动状态包括运输车的运动速度、运动方向和车辆装载状态;车辆装载状态包括载人、载物和空载。
优选的,车辆冲突包括两运输车相向而行的错车现象;
当车辆冲突为两运输车相向而行的错车现象时,生成的冲突避让方案能够使得一方的运输车获得路权,另一方的运输车驶入设置的避让区进行避让;运输车获得路权的优先级如下:载人的运输车>载物的运输车>空载的运输车,并且在同一优先级下同向运输车更多的一方获得路权。
优选的,车辆冲突包括两运输车同向而行的超车现象;
当车辆冲突为两运输车同向而行的超车现象时,生成的冲突避让方案能够使得被超车一方的运输车驶入设置的避让区进行避让,而超车一方的运输车减速等待被超车一方的运输车驶入设置的避让区后进行超车。
优选的,运输车调度方案还包括危险避让方案;
步骤S03中,根据入井顺序方案或出井顺序方案对应调度各个运输车;然后获取井下各个区域的危险气体浓度数据,并将危险气体浓度数据大于或等于设置的危险浓度阈值的区域作为危险区域;最后根据各个运输车的目标运输区域和井下运动状态,以及井下的地图布局信息预测各个运输车对应的车辆运输路线,并根据各个运输车的车辆运输路线判断是否存在经过危险区域的运输车:若不存在,则根据入井顺序方案或出井顺序方案继续调度各个运输车;若存在,则生成对应的危险避让方案以调度对应的运输车进行避让。
优选的,当存在经过危险区域的运输车时,能够根据对应运输车的目标运输区域和井下运动状态,以及井下的地图布局信息和已知危险区域生成对应的危险避让方案,危险避让方案能够使得对应运输车避开已知危险区域行驶。
本发明中用于井下自动化运输系统的调度管理方法与现有技术相比,具有如下有益效果:
1、本发明中,根据人员运输量和矿物运输量计算运输车需求量,并进一步计算各个运输车的目标运输区域,即能够实现运输车的运输任务分配调度;同时,获取各个运输车的井下运动状态,即能够实现运输车的运动监控调度。因此,根据各个运输车的目标运输区域和井下运动状态生成的运输车调度方案能够有效的实现自动化运输系统的全局调度,从而能够辅助提升自动化运输系统的调度管理效果。
2、本发明中,根据入井顺序方案和出井顺序方案实现自动化运输系统的全局调度,即能够对各个运输车从地面进入井下和从井下返回地面的时间和顺序进行规划调度,从而能够进一步提升自动化运输系统的全局调度效果。
附图说明
为了使发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
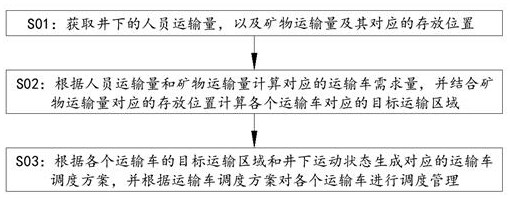
图1为实施例一中调度管理方法的逻辑框图。
具体实施方式
下面通过具体实施方式进一步详细的说明:
实施例一:
本实施例中公开了一种用于井下自动化运输系统的调度管理方法。
如图1所示,一种用于井下自动化运输系统的调度管理方法,包括以下步骤:
S01:获取井下的人员运输量,以及矿物运输量及其对应的存放位置。
S02:根据人员运输量和矿物运输量计算对应的运输车需求量,并结合矿物运输量对应的存放位置计算各个运输车对应的目标运输区域。
S03:根据各个运输车的目标运输区域和井下运动状态生成对应的运输车调度方案,并根据运输车调度方案对各个运输车进行调度管理。具体的,本发明的运输系统是电机车运输系统,运输车是指电机车。运输车调度方案包括入井顺序方案和出井顺序方案。运输车的井下运动状态包括运输车的运动速度、运动方向和车辆装载状态;车辆装载状态包括载人、载物和空载。通过安装在运输车上的定位模块、加速度传感器等现有设备获取运输车的运动速度和运动方向,车辆装载状态是根据人员运输量和矿物运输量预先计算的。
本发明中,根据人员运输量和矿物运输量计算运输车需求量,并进一步计算各个运输车的目标运输区域,即能够实现运输车的运输任务分配调度;同时,获取各个运输车的井下运动状态,即能够实现运输车的运动监控调度。因此,根据各个运输车的目标运输区域和井下运动状态生成的运输车调度方案能够有效的实现自动化运输系统的全局调度,从而能够辅助提升自动化运输系统的调度管理效果。其次,本发明根据入井顺序方案和出井顺序方案实现自动化运输系统的全局调度,即能够对各个运输车从地面进入井下和从井下返回地面的时间和顺序进行规划调度,从而能够进一步提升自动化运输系统的全局调度效果。
具体实施过程中,步骤S03中,根据各个运输车的目标运输区域和井下的地图布局信息生成对应的入井顺序方案,并根据入井顺序方案对应调度各个运输车从地面进入井下。
本发明中,根据各个运输车的目标运输区域和井下的地图布局信息生成的入井顺序方案能够对各个运输车从地面进入井下的时间和顺序进行规划调度,从而能够更好的提升自动化运输系统的全局调度效果。
具体实施过程中,步骤S02中,还根据人员运输量和矿物运输量计算各个运输车在井下的矿物装载量和人员装载量;
步骤S03中,根据各个运输车在井下的矿物装载量和人员装载量计算各个运输车对应的预测装载时间;然后根据各个运输车的入井顺序方案和预测装载时间生成对应的出井顺序方案;最后根据出井顺序方案对应调度各个运输车从井下返回地面。
本发明中,计算预测了各个运输车的预测装载时间,即能够对各个运输车的装载时间进行规划调度;同时,根据各个运输车的入井顺序方案和预测装载时间生成的出井顺序方案能够对各个运输车从井下返回地面的时间和顺序进行规划调度,从而能够更好的提升自动化运输系统的全局调度效果。
实施例二:
本实施例在实施例一的基础上,进一步公开了出现车辆冲突时的调度管理方法。
本实施例中,运输车调度方案包括冲突避让方案。
步骤S03中,根据入井顺序方案或出井顺序方案对应调度各个运输车;然后根据各个运输车的目标运输区域和井下运动状态,以及井下的地图布局信息预测各个运输车对应的车辆动态路径;最后根据各个运输车的车辆动态路径判断运输车之间是否存在车辆冲突:若不存在,则根据入井顺序方案或出井顺序方案继续调度各个运输车;若存在,则生成对应的冲突避让方案以调度对应的运输车进行避让。具体的,运输车的井下运动状态包括运输车的运动速度、运动方向和车辆装载状态;车辆装载状态包括载人、载物和空载。通过安装在运输车上的定位模块、加速度传感器等现有设备获取运输车的运动速度和运动方向,车辆装载状态是根据人员运输量和矿物运输量预先计算的。
实际调度管理时,预先生成的入井顺序方案和出井顺序方案可能会受到实际运行和操作的影响,例如人员和矿物的实际装载时间快于或慢于预测装载时间,或者运输车的实际运行速度快于或慢于预设运行时间等,均会导致运输车不能完全按照入井顺序方案和出井顺序方案完成调度管理,进而使得原本能够错开运行的运输车出现车辆冲突。所以,本发明能够预测各个运输车的车辆动态路径,进而能够根据各个运输车的车辆动态路径预判运输车之间可能会存在的车辆冲突,并能够在预判到可能存在的车辆冲突后生成冲突避让方案以调度运输车进行冲突避让,进而能够保证运输车的冲突避让调度效果,从而能够进一步提升自动化运输系统的全局调度效果。
具体实施过程中,车辆冲突包括两运输车相向而行的错车现象;
当车辆冲突为两运输车相向而行的错车现象时,生成的冲突避让方案能够使得一方的运输车获得路权,另一方的运输车驶入设置的避让区进行避让;运输车获得路权的优先级如下:载人的运输车>载物的运输车>空载的运输车,并且在同一优先级下同向运输车更多的一方获得路权。
本发明中,预判到运输车之间可能存在的相向而行的错车现象时,能够使得一方的运输车获得路权,另一方的运输车驶入设置的避让区进行避让,从而能够有效的保证错车时的冲突避让调度效果。其次,运输车获得路权的优先级为载人的运输车>载物的运输车>空载的运输车,这能够在保证冲突避让调度效果的前提下兼顾运输车的运行安全性。
具体实施过程中,车辆冲突包括两运输车同向而行的超车现象;
当车辆冲突为两运输车同向而行的超车现象时,生成的冲突避让方案能够使得被超车一方的运输车驶入设置的避让区进行避让,而超车一方的运输车减速等待被超车一方的运输车驶入设置的避让区后进行超车。
本发明中,预判到运输车之间可能存在的同向而行的超车现象时,能够使得被超车一方的运输车驶入设置的避让区进行避让,进而使得超车一方的运输车减速等待超车通过,这能够有效的保证超车时的冲突避让调度效果。同时,保证超车一方的运输车优先通过的方式,还能够在保证冲突避让调度效果的前提下兼顾运输车的运输效率。
实施例三:
本实施例在实施例一的基础上,进一步公开了出现危险气体险情时的调度管理方法。
本实施例中,运输车调度方案还包括危险避让方案。
步骤S03中,根据入井顺序方案或出井顺序方案对应调度各个运输车;然后获取井下各个区域的危险气体浓度数据,并将危险气体浓度数据大于或等于设置的危险浓度阈值的区域作为危险区域;最后根据各个运输车的目标运输区域和井下运动状态,以及井下的地图布局信息预测各个运输车对应的车辆运输路线,并根据各个运输车的车辆运输路线判断是否存在经过危险区域的运输车:若不存在,则根据入井顺序方案或出井顺序方案继续调度各个运输车;若存在,则生成对应的危险避让方案以调度对应的运输车进行避让。具体的,危险气体包括瓦斯、甲烷、一氧化碳、硫化氢、二氧化硫等对人体有害或易爆炸的气体。通过现有技术中成熟使用的瓦斯传感器、甲烷传感器、一氧化碳传感器、硫化氢传感器、二氧化硫传感器等进行采集。危险浓度阈值可根据国家相关规定设置。
具体实施过程中,当存在经过危险区域的运输车时,能够根据对应运输车的目标运输区域和井下运动状态,以及井下的地图布局信息和已知危险区域生成对应的危险避让方案,危险避让方案能够使得对应运输车避开已知危险区域行驶。
实际调度管理时,井下的危险气体会影响运输车的实际运行和调度,例如易爆炸的危险气体浓度超标时容易发生爆炸,人体有害的危险气体浓度超标时会对人员造成伤害,因此运输车应该尽可能的避开危险气体浓度超标的区域行驶。所以,本发明能够获取井下各个区域的危险气体浓度数据并确定危险气体浓度超标的危险区域,同时能够预测各个运输车的车辆运输路线,进而能够根据车辆运输路线预判各个运输车是否会经过危险区域,并能够在预判到运输车会经过危险区域时生成危险避让方案以调度运输车进行避让,这能够进一步提升自动化运输系统的全局调度效果,并能够在有效的保证危险避让调度效果的前提下兼顾运输车的运行安全性。
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
- 一种用于井下自动化运输系统的调度管理方法
- 一种井下运输系统集中控制自动化装置