导管恒力传动机构、导管控制装置及手术机器人
文献发布时间:2023-06-19 19:32:07
技术领域
本发明涉及介入导管驱动控制技术领域,特别涉及一种导管恒力传动机构、导管控制装置及手术机器人。
背景技术
本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。
血管内介入导管(以下简称导管)是血管内介入技术的主要工具之一,包括造影介入导管、药物输送介入导管、血管成形术导管等。
发明人发现,现有的驱动导管的机构多为压力弹簧预紧,或固定尺寸导管外径不能改变,当导管外径变化较大时则无法适应,容易出现配合不紧密或者将导管压紧甚至损坏的情况。
发明内容
为了解决现有技术的不足,本发明提供了一种导管恒力传动机构、导管控制装置及手术机器人,能够适应不同直径的导管恒力驱动作业,整体结构简化,提高了导管控制的安全性。
为了实现上述目的,本发明采用如下技术方案:
本发明第一方面提供了一种导管恒力传动机构。
一种导管恒力传动机构,包括:底座、驱动机构、主动轮、从动轮和导向件;
驱动机构与底座固定连接,驱动机构的输出轴通过传动机构与主动轮的转轴连接以带动主动轮旋转;
导向件与底座固定连接,从动轮的转轴位于导向件的导向槽中,主动轮与从动轮用于配合压紧导管,主动轮的转轴与从动轮的转轴通过恒力弹簧连接。
作为本发明第一方面可选的一种实现方式,传动机构包括第一锥齿轮和第二锥齿轮,第一锥齿轮与驱动机构的输出轴连接,第一锥齿轮与第二锥齿轮啮合,第二锥齿轮与主动轮的转轴连接。
作为本发明第一方面可选的一种实现方式,导向件的导向槽为的轴线为直线。
作为本发明第一方面可选的一种实现方式,导向件的侧部开有与导向槽连通的通槽,恒力弹簧穿过通槽后与从动轮的转轴连接。
作为本发明第一方面可选的一种实现方式,恒力弹簧的第一端缠绕固定在从动轮的转轴上,恒力弹簧的第二端缠绕固定在主动轮的转轴上。
作为本发明第一方面可选的一种实现方式,所述驱动机构为电机。
作为本发明第一方面可选的一种实现方式,主动轮和从动轮的顶部相对于底座的高度相同。
作为本发明第一方面可选的一种实现方式,主动轮的转轴轴线以及从动轮的转轴轴线均与底座的上表面垂直。
本发明第二方面提供了一种导管控制装置,包括本发明第一方面所述的导管恒力传动机构。
本发明第三方面提供了一种手术机器人,包括本发明第一方面所述的导管恒力传动机构;或者,包括本发明第二方面所述的导管恒力传动机构。
与现有技术相比,本发明的有益效果是:
1、本发明创新性的提出了一种导管恒力传动机构,通过恒力弹簧与主动轮和从动轮的配合,能够适应不同直径的导管恒力驱动作业,简化了整体结构,提高了导管控制的安全性。
2、本发明创新性的提出了一种导管恒力传动机构,从动轮的转轴位于导向件的导向槽中,结合恒力弹簧,实现了对不同直径导管的自适应,提高了适用范围。
3、本发明创新性的提出了一种导管恒力传动机构,优化了整体结构减少了零件数量,结构简单化,降低了材料加工成本和装配时间成本。
本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
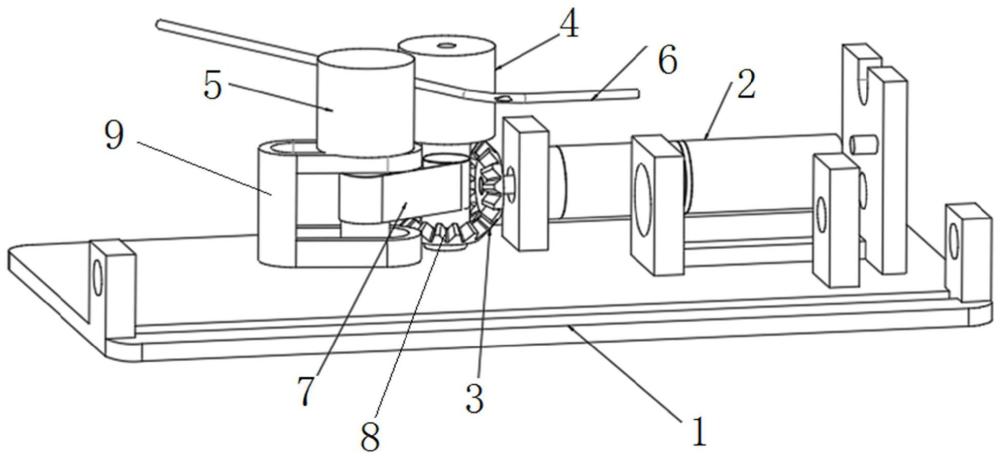
图1为本发明实施例1提供的导管恒力传动机构的结构示意图。
图2为本发明实施例1提供的恒力弹簧的结构示意图。
其中,1、底座;2、电机;3、第一锥齿轮;4、主动轮;5、从动轮;6、导管;7、恒力弹簧;8、第二锥齿轮;9、导向件;10、导向槽;11、通槽。
具体实施方式
下面结合附图与实施例对本发明作进一步说明。
应该指出,以下详细说明都是示例性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
实施例1:
如图1所示,本发明实施例1提供了一种导管恒力传动机构,包括:底座1、驱动机构、主动轮4、从动轮5和导向件9;
驱动机构与底座1固定连接,驱动机构的输出轴通过传动机构与主动轮的转轴连接以带动主动轮4旋转;
导向件9与底座1固定连接,从动轮5的转轴位于导向件9的导向槽10中,主动轮4与从动轮5用于配合压紧导管6,主动轮4的转轴与从动轮5的转轴通过恒力弹簧7连接。
可选的,本实施例中,传动机构包括第一锥齿轮3和第二锥齿轮8,第一锥齿轮3与驱动机构的输出轴连接,第一锥齿轮3与第二锥齿轮8啮合,第二锥齿轮8与主动轮4的转轴连接。
可选的,本实施例中,导向件9的导向槽10为的轴线为直线;可以理解的,在其他一些实现方式中,导向件9的导向槽10为的轴线也可以为弧线,只要能够实现从动轮的有效限位即可,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
可选的,本实施例中,导向件9的侧部开有与导向槽10连通的通槽11,恒力弹簧7穿过通槽11后与从动轮5的转轴连接。
可选的,本实施例中,恒力弹簧7的第一端缠绕固定在从动轮5的转轴上,恒力弹簧7的第二端缠绕固定在主动轮4的转轴上;可选的,恒力弹簧可以是涡状的恒力弹簧。
可选的,本实施例中,所述驱动机构为电机;可以理解的,在其他一些实现方式中,所述驱动机构也可以是气压旋转驱动机构或者液压旋转驱动机构,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
可选的,本实施例中,主动轮4和从动轮5的顶部相对于底座的高度相同;可以理解的,在其他一些实施方式中,主动轮4和从动轮5的顶部相对于底座的高度也可以相同,但是两者一定要有夹紧面以夹紧导管,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
可选的,本实施例中,从动轮5的转轴与底座1的上表面接触;可以理解的,在其他一些实施方式中,从动轮5的转轴与底座1的上表面也可以接触,只要从动轮5的转轴在导向槽10内被有限的限位即可,本领域技术人员可以根据具体工况进行选择,这里不再赘述。
本实施例中,主动轮4的转轴轴线以及从动轮5的转轴轴线均与底座1的上表面垂直。
具体的,本实施例所述的导管恒力传动机构的作业方法为:
主动轮4和从动轮5之间放入导管6,通过恒力弹簧7使主动轮4和从动轮5夹紧导管6,通过电机2带动使导管6被挤出,由于弹簧7为恒力弹簧,保证了在导管6外径变化时,主动轮4和从动轮5之间的夹紧力保持不变,进而实现了恒力传动作业。
实施例2:
本发明实施例2提供了一种导管控制装置,包括本发明实施例1所述的导管恒力传动机构。
实施例3:
本发明实施例3提供了一种手术机器人,包括本发明实施例1所述的导管恒力传动机构;或者,包括本发明实施例2所述的导管恒力传动机构。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。