一种履带车履带变形结构
文献发布时间:2024-01-17 01:26:37
技术领域
本发明一种履带车履带变形结构。
背景技术
随着机器人技术的发展,越来越多的移动底盘被研发出来,为了让履带车能在楼梯上,山地石坡上,甚至废墟上自由地行走,变形履带车被研发了出来。凭借其优秀的履带变形能力,变形履带车可以在更多更复杂的场地上行走。
但是,目前市场上存在的变形履带车的变形结构存在一些问题。如专利US7493976,该专利的履带是一个三角形结构,通过中间的摆臂摆动,在保证三角形履带周长不变的情况下改变三角形的形状,进而去应对不同的行走场地,它是通过一个凸轮机构保证在三角形履带长度不变的情况下每个履带轮上的张力不变的。但凸轮是高副,压强大,易磨损。对变形履带车而言,凸轮机构的损坏会导致履带无法变形,进而导致履带车无法正常工作,且由于它的凸轮机构没有设计防尘,凸轮从动件与凸轮接触用凸轮随动器的方式进行接触。在运动过程中,两个曲面以线接触的形式进行接触。若有泥沙附着在凸轮表面,从动件上的凸轮随动器会将泥沙辗过进一步导致磨损。而且由于泥沙的附着,会导致履带的张力变大,甚至会导致履带断裂。
发明内容
为解决以上现有技术存在的问题,本发明提出一种履带车履带变形结构,其提出一种连杆双滑块机构,让三角形履带能实现与专利US7493976一样的变形,且有效地解决了凸轮副带来的问题。
本发明可通过以下技术方案予以实现:
一种履带车履带变形结构,包括底盘模块、2组带轮模块,所述底盘模块和带轮模块通过避震模块连接;所述底盘模块主要包括电池和电控箱,控制履带车的运行和提供能量;所述带轮模块包括:固定板、2个电机减速机一体机、驱动带轮、从动带轮、摆杆带轮、第一滑块机构、第二滑块机构、滑块连杆、摆杆和履带;所述固定板通过所述避震模块与底盘模块相连,其中一个电机减速机一体机固定在所述固定板上,所述驱动带轮与该电机减速机一体机相连;所述从动带轮与固定板连接并能自由旋转;所述第一滑块机构设有2条滑轨水平且居中地固定在所述固定板上,第一滑块在对应滑轨上自由运动而不脱出;所述滑块连杆一端与第一滑块的形心连接,并能自由旋转;所述第二滑块机构有2条滑轨竖直且居中地固定在所述固定板上;第二滑块在对应滑轨上自由运动而不脱出;所述第二滑块高于第一滑块,使第一滑块和第二滑块在任意位置运动时都不干涉;所述滑块连杆的另一端与第二滑块的形心通过转动副连接,并能自由旋转,同时转轴穿过第二滑块通过固连的形式与所述摆杆一端进行连接,使摆杆与滑块连杆同步运动且共面,通过上述连杆双滑块机构使摆杆在摆动时,外端轨迹为椭圆;另一个电机减速机一体机固定在摆杆的另一端,且连接摆杆带轮;所述履带同时环住驱动带轮、从动带轮和摆杆带轮;2组带轮模块的装配方式和零件完全一致,都是固定板通过避震模块安装在底盘模块上,与底盘模块连接后呈中心对称。
进一步地,所述避震模块包括2个导向杆,2个弹簧,2个直线轴承;所述导向杆的上下端与底盘模块固连,直线轴承在导向杆上可自由滑动而不脱出;所述弹簧安装于直线轴承的正上方,直线轴承与带轮模块连接。
进一步地,所述履带车在正常行驶过程中:左侧的摆杆带轮的转速与左侧的驱动带轮的转速一致,右侧的摆杆带轮的转速与右侧的驱动带轮的转速一致。
进一步地,所述履带车停止过程中变形:左右的驱动带轮不运动,左右的摆杆带轮分别以反向、同转速的转动。
进一步地,所述履带是柔性的,连杆双滑块机构让摆杆运动时的椭圆轨迹与履带约束3个带轮所形成的椭圆轨迹一致,摆杆带轮在履带的内齿上移动,从而使摆杆绕转轴转动,使履带围城的三角形产生不同的形状,从而实现履带的大角度上坡,加长履带触地长度。
进一步地,所述履带车运动过程中变形:若左右的驱动带轮的转速为ω,若摆杆带轮的转速不等于ω,就会产生速度差,使摆杆绕转轴转动,使履带围成的三角形产生不同的形状,从而实现履带的大角度上坡,加长履带触地长度。
有益效果
本发明通过替换原本变形履带车凸轮机构,解决了凸轮机构是一个高副结构,容易磨损,该结构也很难做防尘的问题。本发明中的连杆双滑块机构有2个移动副和2个转动副,均为低副,面接触,压力小,承载好。现有的凸轮副是两个曲面实现线接触,容易将泥沙辗进去,相比于凸轮副,本发明转动副设计采用防尘的轴承,本身不会进泥沙,移动副采用滑轨滑块的机构,滑块会将泥沙扫出滑轨,相比于凸轮结构,该结构整体更容易进行防尘设计,且相比于用硬质材料定制精加工一个凸轮,滑块滑轨成本低廉,互换性高。
附图说明
图1为本发明的结构示意图;
图2为本发明局部结构示意图;
图3为本发明局部结构示意图;
图4为本发明摆臂向前时结构示意图;
图5为本发明摆臂放平时结构示意图;
图6为本发明摆臂翘起车体示意图;
图7为本发明摆臂向前爬楼梯时示意图;
图8为本发明摆臂放平爬楼梯时示意图;
图9为椭圆运动的原理论证图;
图10为变形机构原理图。
具体实施方式
以下通过特定的具体实施例说明本发明的实施方式,本领域的技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。
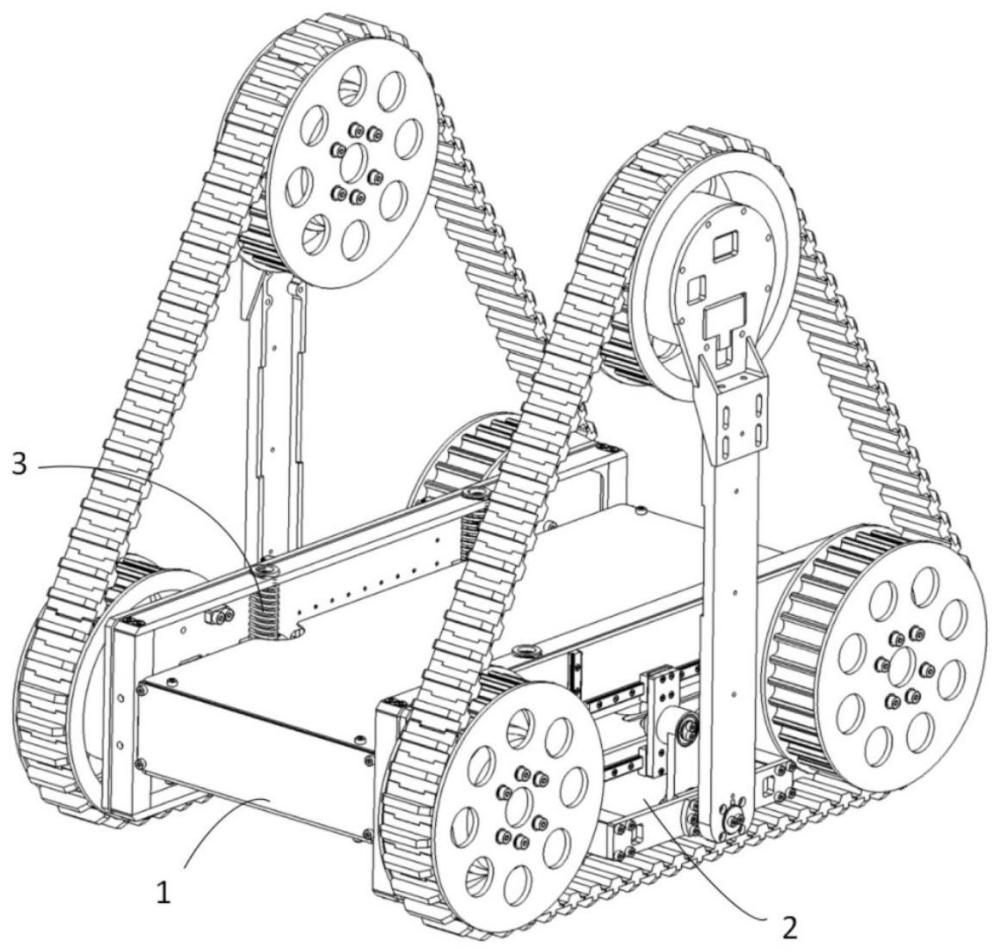
如图1-6所示,本发明的一种履带车履带变形结构,包括底盘模块1、2组带轮模块2,底盘模块1和带轮模块2通过避震模块3连接;
底盘模块1主要包括电池和电控箱,控制履带车的运行和提供能量;
带轮模块2包括:固定板21、2个电机减速机一体机22、驱动带轮23、从动带轮24、摆杆带轮25、第一滑块机构26、第二滑块机构27、滑块连杆28、摆杆29和履带30。
固定板21通过避震模块与底盘模块1相连,一个电机减速机一体机22固定在固定板21上,驱动带轮23与该电机减速机一体机22相连,从动带轮24与固定板21连接并能自由旋转;为了保证滑块机构的稳定性和可靠性,第一滑块机构26有2条滑轨261水平且居中地固定在固定板上21,第一滑块262在可在滑轨上自由运动而不脱出;滑块连杆28一端与第一滑块262的形心连接,并能自由旋转;第二滑块机构27有2条滑轨271竖直且居中地固定在固定板21上;第二滑块272在可在对应滑轨271上自由运动而不脱出;第二滑块272高于第一滑块262,使第一滑块262和第二滑块272在任意位置运动时都不干涉;滑块连杆28的另一端与第二滑块272的形心通过转动副连接,并能自由旋转,同时转轴穿过第二滑块272通过固连的形式与摆杆29一端进行连接,使摆杆29与滑块连杆28同步运动且共面,通过这套机构(连杆双滑块机构)可使摆杆29在摆动时,外端轨迹为椭圆(论证如下文)。另一个电机减速机一体机22固定在摆杆29的另一端,且连接摆杆带轮25。履带30同时环住驱动带轮23、从动带轮24和摆杆带轮25。2组带轮模块2的装配方式和零件完全一致,都固定板通过避震模块3安装在底盘模块上,与底盘模块连接后呈中心对称。
本实施例中,避震模块包括2个导向杆,2个弹簧,2个直线轴承;导向杆的上下端与底盘模块固连,直线轴承在导向杆上可自由滑动而不脱出;弹簧安装于直线轴承的正上方,直线轴承与带轮模块连接。
履带机器人在正常行驶过程中:左侧的摆杆带轮25的转速与左侧的驱动带轮23的转速一致,右侧的摆杆带轮25的转速与右侧的驱动带轮23的转速一致。
履带机器人停止过程中变形:左右的驱动带轮23不运动,左右的摆杆带轮25分别以反向、同转速的转动。
因为履带是柔性的,通过设计,连杆双滑块机构让摆杆29运动时的椭圆轨迹与履带30约束3个带轮所形成的椭圆轨迹一致,摆杆带轮25会在履带30的内齿上移动,从而使摆杆29绕转轴转动,使履带30围成的三角形产生不同的形状,从而实现履带30的大角度上坡,加长履带触地长度等功能。
履带机器人运动过程中变形:若左右的驱动带轮23的转速为ω,若摆杆带轮25的转速不等于ω,就会产生速度差,使摆杆29绕转轴转动,使履带30围城的三角形产生不同的形状,从而实现履带的大角度上坡,加长履带30触地长度等功能。
如图7所示,爬楼梯时,摆臂向前,相比无摆臂的履带车更容易爬上楼梯,也能爬上台阶更高的楼梯。
如图8所示,爬楼梯过程中,将摆臂放平,可有效防止履带车倾覆。
连杆双滑块机构让摆杆带轮实现椭圆运动的原理论证如下:
如图9所示,p点在x轴上运动模拟水平运动的滑块机构;q点在y轴上运动模拟竖直运动的滑块机构;pq即为滑块连杆的长度。在pq(包括延长线)上取一点m,若伴随pq点的运动,m的运动轨迹为椭圆,则机构设计完成后摆杆带轮的运动也为椭圆。
设p点坐标为(x
设q点坐标为(0,y
令qm=λpq
则pm=(1-λ)pq
即x
因为opq为直角三角形,所以满足:x
即
即
即
该方程满足椭圆方程,所以m点的轨迹为椭圆形。
根据履带周长计算滑块连杆机构的参数,方式如下:
如图10所示,3个小圆分别代表变形履带车的驱动带轮、从动带轮和摆臂带轮。设计时,3个带轮半径均为R;虚线椭圆为摆臂带轮在摆臂运动时的轨迹;驱动带轮和从动带轮位于x轴上,同时,根据椭圆的定义,两个带轮在椭圆的焦点上,距离为2c;椭圆长径为2a;椭圆短径为2b;S为履带的周长;n为滑块的运动距离;pq为滑块连杆的长度(根据结构分析滑块p在x轴上的运动距离和滑块q在y轴上的运动距离一致,且pq=n);qm(1)为摆杆的长度。滑块连杆机构所需计算的参数为2个:滑块连杆的长度和摆杆的长度。
根据椭圆定义和摆杆竖着和水平的特殊位置可得:
l=a
l-n=b
S=2a+2c+2πR
c
根据设计需求可定椭圆尺寸,即a,b,c为常数,联立上式可得:
因为l>n,所以
根据得到的的l和S、R的关系,对带轮和履带进行选型,即可定下S和R,即可算出l和n,从而确定整个结构的参数。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。