马达控制装置
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及马达控制装置。
背景技术
作为本技术领域的背景技术,已知有下述专利文献1。专利文献1中揭示了一种马达驱动装置,其对各相的电枢绕组相互独立设置的多相马达的驱动进行控制,该马达驱动装置具备:逆变电路,其将经由直流母线供给的直流电转换为多相的交流电而分别输出至所述各相的电枢绕组;以及控制器,其用于控制所述逆变电路,在所述交流电中任一相缺相的情况下,所述控制器以所述发生了缺相的相除外的其他正常相的各交流电相互抵消的方式对流至所述正常相的电枢绕组的各电流的相位差进行调整。
现有技术文献
专利文献
专利文献1:日本专利第6194113号
发明内容
发明要解决的问题
在将专利文献1记载的马达驱动装置运用于三相马达的情况下,在U相或W相缺相的情况下不会有特别的问题,而在V相缺相的情况下,调整电流的相位会导致马达的旋转方向变为与此前相反的方向这一问题的产生。如此,专利文献1的技术存在根据发生了缺相的相的不同而无法恰当地调整电流的相位这一问题。
解决问题的技术手段
本发明的马达控制装置对具有与多个相各方相对应的多个绕组、各绕组相互独立地加以连接的马达的驱动进行控制,其中,在所述多个相中的任一相缺相的情况下,将所述发生了缺相的相除外的任一正常相作为基准相,以不跨过所述发生了缺相的相的方式对流至所述基准相以外的所述正常相的电流的相位进行调整。
发明的效果
根据本发明,多相马达中无论哪一相缺相都能恰当地调整电流的相位。
附图说明
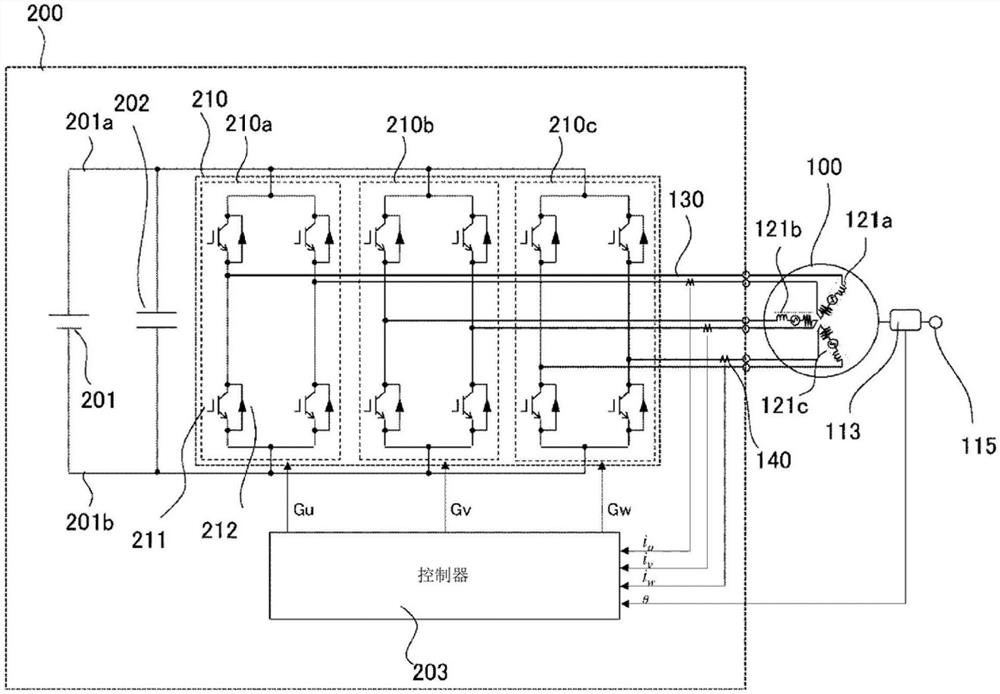
图1为表示包含本发明的一实施方式的马达控制装置的马达驱动系统的构成的图。
图2为表示马达的结构的一例的图。
图3为表示平时的马达中的各相的电流波形的一例的图。
图4为表示平时的马达中的磁通势向量的图。
图5为表示平时的马达中的各相的感应电压、电流及功率的波形例的图。
图6为表示在W相缺相时进行了电流的相位调整的情况下的马达中的各相的感应电压、电流及功率的波形例的图。
图7为表示W相缺相时的马达中的相位调整前和相位调整后的各相的电流波形的一例的图。
图8为表示W相缺相时的马达中的相位调整后的磁通势向量的图。
图9为表示U相缺相时的马达中的相位调整前和相位调整后的各相的电流波形的一例的图。
图10为表示U相缺相时的马达中的相位调整后的磁通势向量的图。
图11为表示V相缺相时的马达中的相位调整前和现有方法下的相位调整后的各相的电流波形的一例的图。
图12为表示V相缺相时的马达中的现有方法下的相位调整后的磁通势向量的图。
图13为表示V相缺相时的马达中的相位调整前和本发明的方法下的相位调整后的各相的电流波形的一例的图。
图14为表示V相缺相时的马达中的本发明的方法下的磁通势向量的图。
图15为说明本发明的方法下的相位调整方法的图。
图16为说明缺相时的相位调整后的马达的向量控制的图。
具体实施方式
下面,参考附图,对本发明的实施方式进行说明。
图1为表示包含本发明的一实施方式的马达控制装置的马达驱动系统的构成的图。图1所示的马达驱动系统200与用于混合动力汽车(HEV)、电动汽车(EV)等的马达100连接在一起,对马达100的驱动进行控制。马达驱动系统200具有直流电源201、平滑电容器202、控制器203以及逆变电路210。
马达100是具有分别对应于U相、V相、W相的三相的电枢绕组121a、121b、121c的独立绕组型六线三相交流马达。这些电枢绕组121a~121c相互独立地连接到马达驱动系统200。马达驱动系统200对流至分别对应于U相、V相、W相的电枢绕组121a~121c的电流分别独立地进行控制,由此,能够驱动马达100。再者,在以下的说明中,有时也将对应于U相的电枢绕组121a称为“U相线圈121a”、将对应于V相的电枢绕组121b称为“V相线圈121b”、将对应于W相的电枢绕组121c称为“W相线圈121c”。
马达100的输出轴115上安装有检测马达100的磁极位置θ的磁极位置检测器113。磁极位置检测器113例如使用旋转变压器等构成。磁极位置检测器113得到的磁极位置θ的检测结果输出至控制器203。
直流电源201经由直流母线201a、201b向逆变电路210供给直流电。直流电源201例如可以利用锂离子电池等二次电池等。
平滑电容器202用于抑制伴随逆变电路210的动作而产生的直流电压的变动,与逆变电路210并联在直流母线201a与直流母线201b之间。
控制器203向逆变电路210所具有的各相的桥式电路210a、210b、210c分别输出驱动信号Gu、Gv、Gw。通过根据该驱动信号Gu、Gv、Gw使桥式电路210a、210b、210c分别进行动作,控制器203可以控制逆变电路210。再者,控制器203相当于本发明的一实施方式的马达控制装置。
逆变电路210具有分别对应于U相、V相、W相的全桥型桥式电路210a、210b及210c。各桥式电路210a、210b、210c具有作为上下各臂的开关元件而发挥功能的4个IGBT 211和与各IGBT 211并联设置的4个二极管212。在桥式电路210a、210b、210c中,各IGBT211根据来自控制器203的驱动信号Gu、Gv、Gw进行开关动作。由此,从直流电源201供给的直流电得以转换为三相交流电,并从桥式电路210a、210b、210c经由各相的交流电力电缆130分别输出至马达100的各相的电枢绕组121a、121b、121c。
各相的交流电力电缆130上分别设置有用于检测流至马达100的电枢绕组121a、121b、121c的各电流的电流传感器140。电流传感器140检测到的各相的电流值i
图2为表示马达100的结构的一例的图。如图2所示,例如马达100是由定子120和转子111构成的埋入磁铁型马达,所述定子120是以电枢绕组121a~121c相互在电性上呈120°相位差的方式安装的,所述转子111固定在输出轴115上,在内部埋入有多个永磁铁112。定子120与转子111之间设置有气隙101。
图3为表示平时的马达100中的各相的电流波形的一例的图。图3展示了将图2所示的内部结构的马达100像图1那样与马达驱动系统200连接在一起的情况下因从马达驱动系统200供给的交流电而分别流至马达100的电枢绕组121a~121c的各相的电流值i
图4为表示平时的马达100中的磁通势向量的图。图4展示了与图3所示的A~E的各电角度相对应的马达100内的磁通势向量。图4中,磁通势向量F
在图3的三相交流电流流到图2所示的内部结构的马达100的情况下,因这些电流而产生的合成磁通势向量F
图2所示那样的使用永磁铁的马达100的电压方程由以下式(1)表示。
[数式1]
上述式(1)中,v
[数式2]
[数式3]
[数式4]
式(2)中,ω
再者,在图2所示的埋入磁铁型马达的情况下,式(3)、(4)中L
马达100向输出轴115输出的轴扭矩T由以下式(5)表示。式(5)中,P
[数式5]
上述式(5)中的马达100的轴功率P
[数式6]
P
再者,式(6)所示的轴功率P
[数式7]
P
在表面磁铁型马达、凸极比相对较小的埋入磁铁型马达中,如式(6)所示,输入功率P
如根据式(5)所知,若在马达100正以固定的轴转速ω
图5为表示平时的马达100中的各相的感应电压、电流及功率的波形例的图。如前文所述,U相线圈121a、V相线圈121b、W相线圈121c中各自产生的各相的感应电压e
再者,在上述说明中,感应电压波形、电流波形假定为理想的正弦波,而实际上,感应电压波形、电流波形中多少会含有高次谐波,并不是理想的正弦波。但在该情况下,控制器203通过将感应电压波形、电流波形视为正弦波来控制马达100,也能大致无问题地使马达100动作。
如以上所说明,在能够分别独立地控制流至U相线圈121a、V相线圈121b、W相线圈121c的电流的独立绕组型马达100中,通过形成三相的电流平衡的状态,也能在产生固定扭矩的情况下转动马达100。该原理对于三相以外的独立绕组型多相马达也成立。即,若将马达的相数设为n,则通过将各相的电流的相位逐一错开360/n°,能使各相的电流平衡而使马达以固定扭矩旋转。
平时,马达驱动系统200可以通过使马达100的所有相通电来控制马达100的扭矩而使马达100旋转驱动。但是,例如在因任一桥式电路210a、210b、210c中IGBT 211的动作发生异常或者任一相内交流电力电缆130或马达100内的线路发生断路等异常而导致任一相缺相而无法通电的情况下,通过与平时相同的控制方法将无法恰当地控制马达100的扭矩。即,在从逆变电路210分别输出至马达100的U相线圈121a、V相线圈121b、W相线圈121c的交流电中任一相缺相的情况下,若与平时同样地将各相的电流i
另一方面,在本发明的马达驱动系统200中,在输出至马达100的交流电中任一相缺相的情况下,通过控制器203、以发生了缺相的相除外的其他正常相的各交流电相互抵消的方式来调整流至正常相的电枢绕组的电流的相位差。由此,能够减少马达100中的输出扭矩的脉动、继续马达100的旋转。
图6为表示在W相缺相时进行了电流的相位调整的情况下的马达100中的各相的感应电压、电流及功率的波形例的图。在W相缺相的情况下,在马达驱动系统200中,控制器203像图6所示那样将V相的电流i
图7为表示W相缺相时的马达100中的相位调整前和相位调整后的各相的电流波形的一例的图。图7中,(a)表示相位调整前的U相电流i
图8为表示W相缺相时的马达100中的相位调整后的磁通势向量的图。图8中展示了与图7的(b)所示的A~E的各电角度相对应的马达100内的磁通势向量。图8中,磁通势向量F
图8中,合成磁通势向量F
如以上所说明,在W相缺相的情况下,控制器203通过图7的(b)、(c)中的任一方法而以U相电流i
图9为表示U相缺相时的马达100中的相位调整前和相位调整后的各相的电流波形的一例的图。图9中,(a)表示相位调整前的V相电流i
图10为表示U相缺相时的马达100中的相位调整后的磁通势向量的图。图10中展示了与图9的(b)所示的A~E的各电角度相对应的马达100内的磁通势向量。图10中,磁通势向量F
图10中,合成磁通势向量F
如以上所说明,在U相缺相的情况下,控制器203通过图9的(b)、(c)中的任一方法而以V相电流i
图11为表示V相缺相时的马达100中的相位调整前和现有方法下的相位调整后的各相的电流波形的一例的图。图11中,(a)表示相位调整前的U相电流i
图12为表示V相缺相时的马达100中的现有方法下的相位调整后的磁通势向量的图。图12中展示了与图11的(b)所示的A~E的各电角度相对应的马达100内的磁通势向量。图12中,磁通势向量F
图12中,合成磁通势向量F
因此,在本发明中,在V相缺相时,通过以与以往不一样的方法进行相位调整来防止转子111的倒转。下面,对其具体方法进行说明。
图13为表示V相缺相时的马达100中的相位调整前和本发明的方法下的相位调整后的各相的电流波形的一例的图。图13中,(a)表示相位调整前的U相电流i
图14为表示V相缺相时的马达100中的本发明的方法下的相位调整后的磁通势向量的图。图14中展示了与图13的(b)所示的A~E的各电角度相对应的马达100内的磁通势向量。图14中,磁通势向量F
图14中,合成磁通势向量F
如以上所说明,在V相缺相的情况下,控制器203通过图13的(b)、(c)中的任一方法而以U相电流i
接着,进而参考图15,对本发明的方法下的相位调整方法进行说明。图15为说明本发明的方法下的相位调整方法的图。
图15的(a)展示了马达100中三相未缺相而健全的情况下的各相的电流i
图15的(b)展示了马达100中三相中的U相缺相的情况下的相位调整后的V相电流i
再者,图15的(b)展示的是图9的(b)中说明过的相位调整方法也就是以V相为基准相而使W相电流i
图15的(c)展示了马达100中三相中的W相缺相的情况下的相位调整后的U相电流i
再者,图15的(c)展示的是图7的(b)中说明过的相位调整方法也就是以U相为基准相而使V相电流i
图15的(d)展示了马达100中三相中的V相缺相的情况下的相位调整后的U相电流i
此处,考虑在V相缺相时使W相电流i
再者,图15的(d)展示的是图13的(b)中说明过的相位调整方法也就是以U相为基准相而使W相电流i
图16为说明缺相时的相位调整后的马达100的向量控制的图。在马达100中U相、V相、W相中的任一相缺相的情况下,控制器203对流至发生了缺相的相除外的正常相的各相的电流i
再者,如以上说明过的缺相时的电流相位调整带来的扭矩脉动的减少也能运用于三相以外的独立绕组型多相马达。即,若将视为控制对象的马达的相数设为n、将发生了缺相的相数设为m,则本发明的马达控制装置在任一相缺相的情况下以正常相的各交流电的相位差Dp(°)满足以下式(8)的方式调整正常相的各电流。此时,将任一正常相作为基准相,以不跨过发生了缺相的相的方式对流至基准相以外的正常相的各电流的相位进行调整。由此,可以将正常相的合成磁通势向量的旋转方向维持在与平时相同的方向,并且将正常相的各交流电相互抵消。结果,可以抑制马达的输出扭矩的脉动、继续马达的旋转。
Dp=360/2(n-m)···(8)
其中,n、m为正整数,n≥m+2。
要满足上述式(8),以流至正常相的电枢绕组的各电流的相位差Di(°)满足以下式(9)的方式进行调整即可。由此,在任一相发生了缺相时,可以将正常相的各交流电相互抵消、抑制马达的输出扭矩的脉动。
Di=360/(n-m)-360/n···(9)
再者,上述式(8)、(9)中,若设定n=3、m=1,则Dp=90°、Di=60°,得知分别与图6所示的U相功率P
根据以上说明过的本发明的一实施方式,取得以下作用效果。
(1)身为马达控制装置的控制器203对马达100的驱动进行控制。马达100具有与多个相各方相对应的多个电枢绕组121a、121b、121c,各电枢绕组相互独立地加以连接。在多个相中的任一相缺相的情况下,控制器203将发生了缺相的相除外的任一正常相作为基准相,以不跨过发生了缺相的相的方式对流至基准相以外的正常相的电流的相位进行调整。因此,多相马达中无论哪一相缺相都能恰当地调整电流的相位。
(2)马达100的多个相分别对应于U相、V相及W相。在U相缺相的情况下,控制器203像图9或图15的(b)中说明过的那样将未缺相的V相或W相中的一相作为基准相,使流至剩下的W相或V相的电流i
(3)缺相时控制器203进行电流i
(4)马达100上安装有检测马达100所具有的转子111的磁极位置的磁极位置检测器113。控制器203根据该磁极位置检测器113检测到的磁极位置来控制流至正常相的电流的振幅及相位,由此来驱动马达100。因此,在缺相时也能恰当地继续马达100的驱动。
以上说明过的实施方式、各种变形例只是一例,只要无损发明的特征,本发明便不限定于这些内容。此外,上文中对各种实施方式、变形例进行了说明,但本发明并不限定于这些内容。在本发明的技术思想的范围内思索的其他形态也包含在本发明的范围内。
符号说明
100…马达
111…转子
113…磁极位置检测器
120…定子
121a…电枢绕组(U相线圈)
121b…电枢绕组(V相线圈)
121c…电枢绕组(W相线圈)
130…交流电力电缆
140…电流传感器
200…马达驱动系统
201…直流电源
201a、201b…直流母线
202…平滑电容器
203…控制器
210…逆变电路
210a、210b、210c…桥式电路
211…IGBT
212…二极管。
- 马达控制装置及具备该马达控制装置的电动压缩机、移动体用空调、马达控制方法及马达控制程序
- 马达控制装置、马达控制系统、马达控制方法以及马达控制程序