一种风电机组传动链扭振附加阻尼控制方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及风电机组技术领域,尤其涉及一种风电机组传动链扭振附加阻尼控制方法。
背景技术
随着风电机组容量越来越大,机组传动链柔性变大、阻尼变小,各模态耦合概率增大,动态载荷对机组传动链的影响越来越大,传动链扭振问题也越来越突出,严重影响了发电机的实际寿命和风电场的经济效益,因此为传动链增加阻尼对提升机组性能十分重要。
针对于传动链扭振问题,国内外研究主要从机械控制与电气控制两方面进。行传动链主动阻尼控制研究。从机械控制方面,人为地在机组的某些部位安装隔震或耗能装置,从而增加系统的机械阻尼;从电器控制方面,可以通过对发电机的转矩控制进行适当修改来提供阻尼。由于机械控制成本较高,目前较为主流的仍为电气阻尼控制。
实际的风电机组系统中,采用电气阻尼控制方法需要通过传感器采集风轮转速及发电机转速来获取扭转角速度,但风轮转速通常较低,且低速轴传感器的分辨率及准确性可能会有所欠缺,导致无法同时获得风轮和发电机转速,则扭转角速度将无法直接获取,所以在传动链扭振控制环节加入适当的观测器,对扭振控制所需要的状态量进行有效估计是很有必要的。同时考虑避开多阶穿越频率,对于状态估计量进行滤波处理也是很有必要的。
中国专利文献CN109657320A公开了一种“风电机组传动链建模与扭振特性分析方法”。建模与分析方法为:首先:建立传动链动力学模型,其包括:传动链三维实体模型和传动链有限元模型;其次,对传动链有限元模型进行仿真分析,并对仿真结果进行后处理。本发明克服了现有质量块模型仅能提取个别扭振频率的缺陷,避免了由简化部件柔性导致的频率缺失;同时能以图形的形式清晰判别传动链的扭振,从而能定量化分析传动链的扭振特性。
发明内容
本发明主要解决原有的技术方案实现传动链扭振控制成本高,转速采集不便的技术问题,提供一种风电机组传动链扭振附加阻尼控制方法,考虑风电机组传动链扭振特性及运行安全性,建立了轴系两质量块模型下速度环的状态空间方程,采用卡尔曼滤波观测器对传动链扭转角速度进行估计,有效地解决了实际系统中信号测量难题。对传动链扭转角速度进行滤波、信号放大、限幅后得到与传动链扭转速度相反的扰动转矩,附加到风电机组控制系统的给定转矩值上。该方法不仅能避开风轮转速的多阶穿越频率,而且能增大传动链系统的等效阻尼,实现传动链扭振抑制目的。
本发明的上述技术问题主要是通过下述技术方案得以解决的:本发明包括以下步骤:
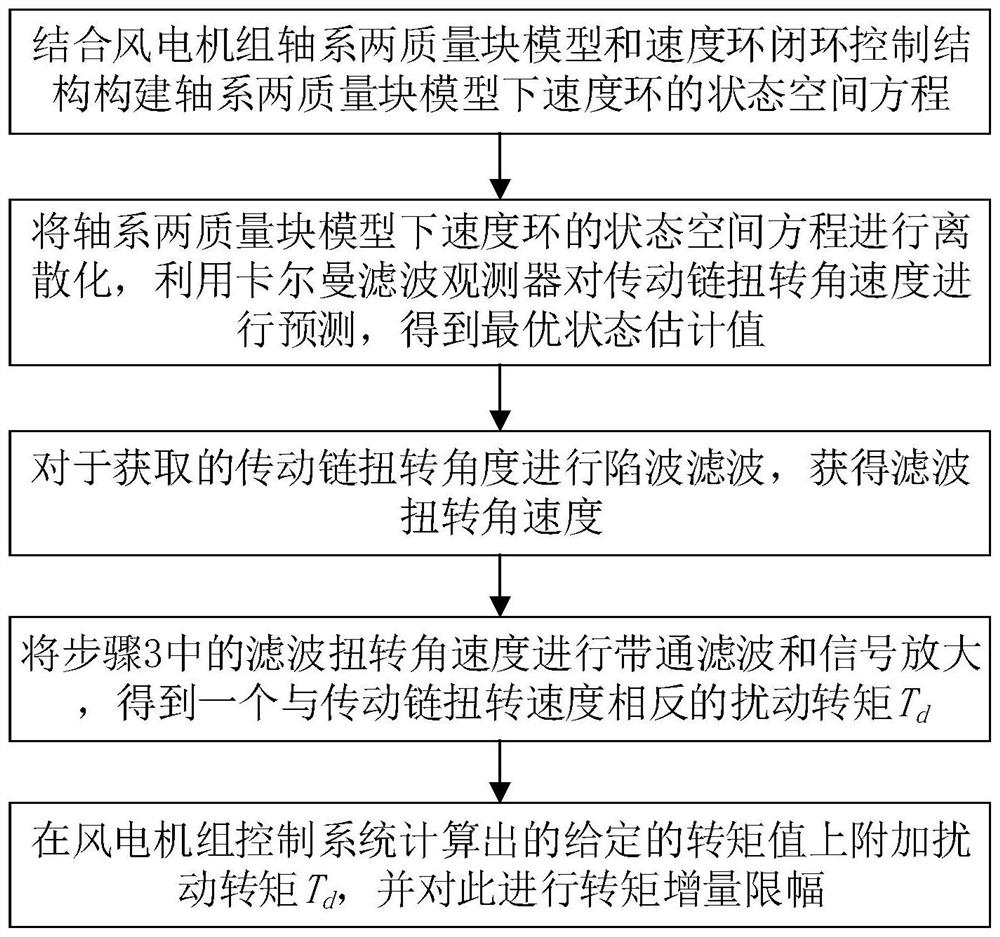
S1结合风电机组轴系两质量块模型和速度环闭环控制结构构建轴系两质量块模型下速度环的状态空间方程;
S2将轴系两质量块模型下速度环的状态空间方程进行离散化,利用卡尔曼滤波观测器对传动链扭转角速度
S3对于获取的传动链扭转角度进行陷波滤波,获得滤波扭转角速度;
S4将步骤3中的滤波扭转角速度进行带通滤波和信号放大,得到一个与传动链扭转速度相反的扰动转矩T
S5在风电机组控制系统计算出的给定的转矩值上附加扰动转矩T
作为优选,所述的步骤S1构建轴系两质量块模型下速度环的状态空间方程
构建过程具体包括:
S1.1简化电流环为比例环节1,电磁转矩指令值
其中K
S1.2采用两质量块模型来描述风轮和低速轴的动态特性,传动链扭转传递用数学公式表达为:
其中J
S1.3结合风电机组轴系两质量块模型和速度环闭环控制结构,轴系两质量块模型下速度环的状态空间表达式可以表示为:
作为优选,所述的步骤S2进行最优状态估计值
S2.1将步骤S1中状态空间方程A、B系数矩阵离散化后得:
其中,I为单位矩阵,T为采样时间;
S2.2假设测量噪声及过程噪声为随机量且均值为0,状态空间方程离散化后的形式如下:
S2.3对于上述离散化差分方程进行处理,得到相应的状态预测方程
P
K
P
其中,R、Q分别为测量噪声和过程噪声的协方差;
S2.4根据上述卡尔曼滤波观测器得到风轮转速估计值和发电机转速估计值后,传动系统扭转角速度估计值
作为优选,所述的步骤S3用于避开风轮转速的多阶穿越频率,陷波滤波器的表达形式如下:
其中,ω
作为优选,所述的步骤S4中带通滤波器的表达形式如下:
其中,K为增益,ω
作为优选,所述的步骤S5限制发电机转矩变化范围过大,最终达到增大传动链系统的等效阻尼,实现传动链扭振抑制目的。
本发明的有益效果是:考虑风电机组传动链扭振特性及运行安全性,建立了轴系两质量块模型下速度环的状态空间方程,采用卡尔曼滤波观测器对传动链扭转角速度进行估计,有效地解决了实际系统中信号测量难题。对传动链扭转角速度进行滤波、信号放大、限幅后得到与传动链扭转速度相反的扰动转矩,附加到风电机组控制系统的给定转矩值上。该方法不仅能避开风轮转速的多阶穿越频率,而且能增大传动链系统的等效阻尼,实现传动链扭振抑制目的。
附图说明
图1是本发明的一种流程图。
图2是本发明的一种陷波滤波器的频率特性图。
图3是本发明的一种风电机组扭振附加阻尼控制结构图。
图4是本发明的一种在湍流风情况下,加入传动链附加阻尼控制与无阻尼控制的风电机组系统动态响应对比图。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。实施例:本实施例的一种风电机组传动链扭振附加阻尼控制方法,如图1所示,包括以下步骤:
S1结合风电机组轴系两质量块模型和速度环闭环控制结构构建轴系两质量块模型下速度环的状态空间方程。
构建过程具体包括:
S1.1简化电流环为比例环节1,电磁转矩指令值
其中K
S1.2采用两质量块模型来描述风轮和低速轴的动态特性,传动链扭转传递用数学公式表达为:
其中J
S1.3结合风电机组轴系两质量块模型和速度环闭环控制结构,轴系两质量块模型下速度环的状态空间表达式可以表示为:
S2将轴系两质量块模型下速度环的状态空间方程进行离散化,利用卡尔曼滤波观测器对传动链扭转角速度
S2.1将步骤S1中状态空间方程A、B系数矩阵离散化后得:
其中,I为单位矩阵,T为采样时间;
S2.2假设测量噪声及过程噪声为随机量且均值为0,状态空间方程离散化后的形式如下:
S2.3对于上述离散化差分方程进行处理,得到相应的状态预测方程
P
K
P
其中,R、Q分别为测量噪声和过程噪声的协方差;
S2.4根据上述卡尔曼滤波观测器得到风轮转速估计值和发电机转速估计值后,传动系统扭转角速度估计值
其中,ω
S4将步骤3中的滤波扭转角速度进行带通滤波和信号放大,得到一个与传动链扭转速度相反的扰动转矩T
其中,K为增益,ω
S5在风电机组控制系统计算出的给定的转矩值上附加扰动转矩T
实施例选择WD131-2200(风轮直径131m、功率2200kw)双馈机型对本发明进行测试,该机型的切入风速3m/s,切出风速为20m/s,最优桨距角为0°。
过工业级仿真软件Bladed进行仿真测试,具体步骤如下:
步骤1:建立轴系两质量块模型下速度环的状态空间方程。在此实施例中,K
步骤2:将上述状态空间方程进行离散化,利用卡尔曼滤波观测器对传动链扭转角速度
步骤3:为避开风轮转速的多阶穿越频率,对于获取的传动链扭转角度进行陷波滤波,获得滤波扭转角速度。在此实施例中,ω
步骤4:将步骤3中的滤波扭转角速度进行带通滤波和信号放大,得到一个与传动链扭转速度相反的扰动转矩T
步骤5:在风电机组控制系统计算出的给定的转矩值上附加T
本实施案例中设置风速为平均风速12m/s的湍流风,三个自由度方向的湍流强度分别为5,4,2.5。从图4中可看出,其中图(a)风速,图(b)发电机转矩,图(c)为输出功率,图(d)为旋转轮毂Mx载荷,在40s~70s时相同的湍流风况下,相比于无阻尼控制而言,由于附加转矩直接叠加到转矩给定值上,附加阻尼控制策略中的发电机转矩波动幅值更大,发电机转速更为平滑。但从旋转轮毂Mx方向载荷可以看出其波动幅度明显小于无阻尼控制,有效较小了传动链动态载荷。因此该传动链扭振附加阻尼控制策略能够增大传动链系统等效阻尼,实现传动链动态载荷有效抑制。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
尽管本文较多地使用了风电机组轴系两质量块模型、速度环闭环控制结构等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。