激光雷达设备
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及一种激光雷达设备。此外,本发明涉及一种用于运行激光雷达设备的方法。此外,本发明涉及一种计算机程序产品。
背景技术
高度自动化的车辆(SAE等级3-5)在未来几年将越来越多地在公共道路上使用。自动化车辆的所有已知方案需要将不同的、本身已知的环境检测传感器结合,例如摄像机、雷达、激光雷达等。最后提到的环境检测传感器原则上是激光扫描器,所述激光扫描器发射激光脉冲并且测量和分析处理在对象上反射的激光的入射的时间。激光雷达传感器可以由所测量的飞行时间求取到对象的间距。
已知的雷达传感器能够通过频率的多普勒偏移来测量对象的速度。
一些激光雷达传感器利用相似的原理(频率调制连续波技术,FMCW),以便由此测量光的多普勒偏移,但是其中,这些传感器目前仍处在研究阶段。
EP 2 819 901 B1公开了一种用于求取车辆的速度的方法,所述车辆配备有至少一个环境传感器,所述环境传感器求取车辆相对于至少一个不移动的对象的环境数据。
发明内容
本发明的任务在于,提供一种改进的激光雷达设备。
根据第一方面,本发明提出一种激光雷达设备,该激光雷达设备具有:
-发送装置,该发送装置具有至少一个激光器元件;
-探测器装置,该探测器装置具有定义的数量的探测器像素;其中,
-能够借助该发送装置发射脉冲式发送信号,所述发送信号在对象上被反射并被探测器装置接收为接收信号;
-分析处理装置,借助所述分析处理装置,能够由对于每个探测器像素所检测的、接收信号的到达时间与发送信号的发送时间的关系来求取所探测的对象的速度。
有利地,通过这种方式提供一种激光雷达设备,借助该激光雷达设备还能够测量对象的径向速度。有利地,通过这种方式可能可以为自动化车辆节省对雷达系统的使用。
根据第二方面,该任务借助用于运行激光雷达设备的方法来解决,该方法具有下述步骤:
-反复地发射具有至少一个激光器元件的发送装置的发送信号;
-接收在对象上反射的接收信号;
-分析处理对于每个探测器像素所检测的、接收信号的到达时间与发送信号的发送时间的关系,其中,求取所探测的对象的速度。
激光雷达设备的优选实施方式是从属权利要求的主题。
激光雷达设备的有利的扩展方案的特征在于,激光器元件的数量和探测器像素的数量是相同的或者不同的。有利地,通过这种方式来支持不同的用于求取对象的径向速度的测量方案和分析处理方案。
激光雷达设备的另一种有利的扩展方案的特征在于,直接在探测器像素上或者在中央计算单元上执行所述分析处理。有利地,由此提供不同的用于分析处理所检测的数据的可能性,其中,出于效率原因,借助探测器ASIC或探测器FPGA以尽可能接近硬件的方式对数据的分析处理,可以是有意义的。
激光雷达设备的另一种有利的扩展方案设置,对于每个探测器像素单个地执行测量。
激光雷达设备的另一种有利的扩展方案设置,对于多个探测器像素同时执行测量。有利地,通过这些方式能够实现不同的用于求取径向速度的测量方案和分析处理方案。
激光雷达设备的另一种有利的扩展方案设置,使用最小的误差平方用于测量值之间的匹配。将简单的数学方法用于有效地分析处理测量数据,以用于提取径向速度的目的。
激光雷达设备的另一种有利的扩展方案的特征在于,能够由测量值之间的数学函数的匹配品质探测另外的对象。由此提供一种选择可能性,借助该选择可能性可以识别有错误的测量,由此例如使中央控制单元能够正确地解读所检测的数据。
激光雷达设备的另外的有利的实施方式的突出之处在于,探测器像素是下述中的一个:SPAD二极管、雪崩光电二极管、CCD传感器。有利地,由此可以借助呈SPAD二极管形式的探测器像素来执行本来已经反复的测量,由此,所提出的对数据的分析处理和对速度的提取提供附加效用,而无需附加的测量时间。替代地,也可以使用其他类型的探测器像素,由此可以使用多种多样的不同的探测器像素。
下面根据多个附图借助其他特征和优点详细描述本发明。在此,相同的或者功能相同的结构元件具有相同的附图标记。这些附图尤其旨在表明对于本发明而言重要的原理,而不必按比例实施。
所公开的设备特征以类似的方式由相应的所公开的方法特征得出,反之亦然。这尤其意味着,涉及该激光雷达设备的特征、技术优点和实施方案以类似的方式由涉及用于运行激光雷达设备的方法的相应的实施方案、特征和优点得出,反之亦然。
附图说明
在附图中示出:
图1示出激光雷达设备的高度简化示意图;
图2示出激光雷达设备的发送单元和接收单元的原理布局;
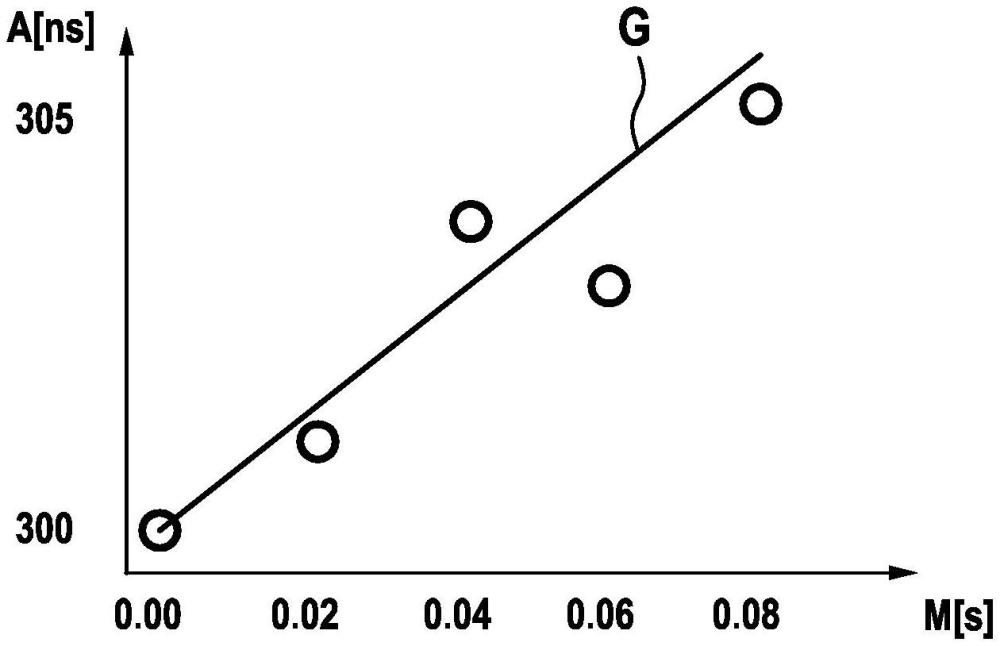
图3示出对所提出的反复的激光雷达测量的分析的时间图表;
图4示出激光雷达传感器的示例性的所提出的反复的测量序列,其具有10Hz帧和五个像素;
图5示出在测量路径中存在另外的对象的情况下激光雷达传感器的示例性的另外的反复的测量序列;
图6示出所提出的激光雷达设备的原理方框图;
图7示出所提出的用于运行所提出的激光雷达设备的方法的流程图。
具体实施方式
本发明的核心思想尤其在于,提供一种激光雷达传感器,该激光雷达传感器能够不仅执行对所探测的对象的距离测量、还执行对所探测的对象的径向速度测量。
在此,为所提出的激光雷达设备设置具有多个探测器像素的探测器装置,其中,对于每个探测器像素执行定义的高数量的重复测量并且从这些数据中提取所探测的对象的径向速度。
图1示出所提出的“脉冲式”激光雷达设备100的高度简化方框图。激光雷达设备100包括发送装置10,该发送装置具有一个或者多个激光器元件10a…10n,所述激光器元件发射脉冲式电磁辐射或电磁辐射脉冲,所述脉冲式电磁辐射或电磁辐射脉冲在对象上被反射,其中,所述脉冲式电磁辐射或电磁辐射脉冲的反射被具有探测器像素的探测器装置20接收。所发射的和所接收的辐射脉冲的方向借助箭头标示。
图2以更高的细节程度示出图1的激光雷达设备100。可以看到,激光雷达设备100具有多个激光器元件10a…10n和多个探测器像素20a…20n,其中,每个探测器像素20a…20n分别配属于一个激光器元件10a…10n,由此,激光器元件10a…10n的数量相应于探测器像素20a…20n的数量。激光器元件10a…10n(例如呈VCSEL激光器、DBR激光器等形式)矩阵形地布置在列和行中。布置在激光器矩阵前方的镜头(未示出)使各个激光器元件10a…10n的辐射脉冲指向不同方向。
布置在探测器矩阵前方的第二镜头(未示出)将经反射的辐射脉冲成像到探测器像素20a...20n上,所述探测器像素同样矩阵形地布置,与激光器矩阵的激光器元件10a...10n相似。该镜头如此构造,使得每个探测器像素20a...20n测量并根据本发明分析处理由配属的激光器元件10a...10n发射的、经反射的辐射脉冲。
在所提出的激光雷达设备100的一种替代的实施方式中,激光器元件10a...10n的数量与探测器像素20a...20n的数量不同,使得例如n个激光器元件10a...10n成像到m个探测器像素20a...20n上。例如,可以在每一列中使用单个的激光器元件10a…10n,其中,该激光器元件的辐射脉冲成像到探测器像素20a...20n的相应的列上。在另一种变型中,可以使用单个的激光器元件10a…10n,以便完全且瞬时地照射激光雷达设备100的整个视场(闪光激光雷达)。
探测器矩阵的每个单个的探测器像素20a…20n可以例如构造为单光子雪崩二极管(SPAD),即构造为具有单一探测灵敏度的光电探测器。也能够考虑,将探测器像素20a…20n构型为雪崩光电二极管(APD)或者CCD元件。
电子分析处理电路30读出每个单个的探测器像素20a…20n(例如SPAD元件),使得记录光子的所属的到达时间。0ns在此相应于如下时间:在该时间,配属于所接收的光子的辐射脉冲被发射。由于SPAD像素的二进制探测特性,需要对于每个探测器像素20a…20n进行多个反复的测量,以便可以将有用信号与噪声信号区分开,所述噪声信号例如是背景光。然后,创建所登记的所有事件的统计或直方图作为到达时间的函数。用于每个探测器像素20a…20n的重复的数量优选地处在大约100次重复的数量级上,由此,借助该直方图能够将真实的探测事件与背景光子区分开。
提出,以下述方式方法提取涉及对象的径向速度的数据:
如果由直方图得出激光雷达设备100探测到对象,则可以借助该直方图求取个体的到达时间、即在发射配属的激光脉冲之后光子在时间上的到达作为测量时间M(例如UTC时间)的函数,例如通过将到达时间A记录为绝对测量时间M的函数,如例如在图3中根据五个事件或反复(Repetition)或反射信号的到达时间所标示。如果对象运动远离激光雷达设备100,则到达时间在重复测量内将变得更长,如在图3中根据五个测量所标示的那样。例如,由测量数据形成的直线G的斜率可以借助线性近似在使用最小误差平方的情况下求取,由此,可以通过简单的方式提取所探测的对象的径向速度。
由所求取的直线斜率可以以如下方式求取对象的径向速度:
v = S × c / 2 (1)
其中,
v...对象的径向速度
S...直线的斜率
c...光速
在此,由下述事实得出因数2:光必须经过激光雷达设备100与对象之间的路程两次。例如,在图3中,直线的斜率大约是7×10
所提出的激光雷达传感器在此优选地以在大约10Hz的数量级上的图像重复率(英语:frame rate,帧率)工作,其中,图像重复率相应于探测器装置20的所有探测器像素20a…20n的和。这意味着大约100ms的持续时间,该持续时间对于借助所有探测器像素20a…20n的、完整的帧(英语:frame)的所有测量而言是必需的。在SPAD像素的典型的大约为1ns的时间分辨率的情况下,这允许以大约1m/s的分辨率进行速度测量,这大约相应于行人的速度。在25Hz的图像重复率的情况下,速度分辨率大约是2.5m/s,这大约相应于缓慢的骑自行车的人的速度。
结果,通过这种方式,在探测到对象的情况下,执行对探测到的事件的分析,其中,每个探测器像素20a…20n的反复的到达时间作为测量时间M的函数被分析。
所提到的对各个探测器像素20a…20n的测量和分析处理可以并行地执行,使得可以同时执行多个辐射脉冲和相对应的测量。
替代地,也可以依次地测量和分析处理探测器像素20a…20n。为了测量速度,可能有利的是,各个探测器像素20a…20n的重复在时间上尽可能宽地分布。替代于用于单个的探测器像素20a…20n的直接依次的100次重复地,可以有利的是,在对测量和分析处理下一个探测器像素20a…20n之前,首先借助所设置的所有反复测量完整地执行单个的探测器像素20a…20n的测量和分析处理。
图4示出用于探测器像素20a…20e的简化情况(像素数量P=5)的示例性激光器发送序列和测量图案,所述探测器像素借助多次重复来测量和分析处理。然而,在实践中,探测器像素20a…20n的数量P以及像素测量的重复的数量可以是显著更高的(例如每帧数百次重复)。可以看到,激光雷达设备100在开始五个探测器像素20a…20e的第二次重复之前,首先对全部五个探测器像素20a…20e(P=1至5)进行测量。通过这种方式,可以非常准确地对于每个探测器像素提取速度信息。
所提出的方法有利地能够在真实的速度测量与对如下伪迹(Artefakt)的测量之间进行区分:例如,当另外的对象在测量帧的中间运动到信号路径中时,所检测所述伪迹。在这种情况下,到达时间相对于测量时间显示出不连续性,如示例性地在图5中示出的那样。数据的线性近似显示出较大的最小误差平方,这指示数据的不成功的线性近似并且因此指示无成功的速度测量。可以看到,前三个探测的线性趋势突然被第四个和第五个探测干扰,使得前三个探测之间的直线在考虑到全部五个探测的情况下大幅改变。在实践中,例如,当对象横向于激光雷达设备100的探测方向运动时,可以出现这一点,由此,激光雷达设备100的探测特性忽然被改变。
如果最小误差平方大于事前定义的阈值,则该系统不能够给所探测的对象配属速度,并且在这种情况下,例如可以向中央计算单元传送信号,借助该信号将如下内容信号化:探测器像素20a...20n显示出干扰。通过这种方式,所提出的激光雷达设备100也能够表明用于速度值的置信信息(Vertrauensinformation)。
图6示出所提出的激光雷达设备100的原理方框图。可以看到用于反复发出发送信号的发送装置10。此外,可以看到用于探测被对象反射的辐射的探测器装置20。分析处理装置30在功能上与两个装置10、20连接,该分析处理装置以上述方式执行所探测的对象的速度。
所提出的激光雷达设备100可以例如构造为探测器像素20a…20n的ASIC或者FPGA,这能够以接近硬件且由此有效的方式分析处理范围广泛的测量数据。替代地,也能够考虑,在配备有激光雷达设备100的自动化车辆内的或者该自动化车辆之外的中央计算单元上执行对数据的分析处理。结果是,所提出的方法由此可以实现为计算机程序产品,该计算机程序产品在配属的计算机硬件上实施。
有利地,所提出的激光雷达设备100可以在部分自动化的或者高度自动化的车辆中使用(SAE等级1-5)。
图7示出所提出的用于运行激光雷达设备100的方法的一种实施方式的原理流程。
在步骤200中,反复地发射具有至少一个激光器元件10a…10n的发送装置10的发送信号。
在步骤210中,接收在对象上反射的接收信号。
在步骤220中,分析处理对于每个探测器像素所检测的、接收信号的到达时间与发送信号的发送时间的关系,其中,求取所探测的对象的速度。
总而言之,借助本发明提出一种激光雷达传感器和一种用于运行激光雷达传感器的方法,本发明通过简单的方式设置对径向速度的检测。
本领域技术人员认识到,在不偏离本发明的核心的情况下能够实现大量变形。