无人配送车辆的行驶方法、装置、存储介质及设备
文献发布时间:2024-01-17 01:17:49
技术领域
本申请涉及无人车技术领域,特别涉及一种无人配送车辆的行驶方法、装置、存储介质及设备。
背景技术
随着自动驾驶技术的不断发展,无人驾驶的配送车辆成为物流行业自动化的重要应用工具。
通常,单车智能模式下的无人配送车辆搭载了多种传感器,例如,雷达、相机、全球定位系统(Global Positioning System,GPS)、惯性测量单元(Inertial MeasurementUnit,IMU)等传感器,通过这些传感器感知周围环境及物体,即采集环境感知数据,以供车辆或者云端的智能系统基于这些环境感知数据,来确定需要采取前进、等待、或绕行避让等不同策略。
发明内容
本申请提供了一种无人配送车辆的行驶方法、装置、存储介质及设备,用于优化无人配送车辆的传感器装配。所述技术方案如下:
第一方面,本申请提供了一种无人配送车辆的行驶方法,所述方法应用于无人配送车辆系统中的副车,所述副车和主车的通信方式为无线通信,所述方法包括:
接收所述主车发送的行驶控制信息;
根据所述行驶控制信息,按照队列形式跟随所述主车行驶;其中,
所述行驶控制信息是根据第一感知信息和第二感知信息所确定,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得;
响应于接收到待入队的副车的入队指令,将所述入队指令发送至所述主车,以供所述主车根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息;
接收所述入队指令对应的行驶控制信息;
根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
在一种可能的实现方式中,述方法还包括:
获取所述副车的离队指令;
根据所述离队指令,获取所述离队指令对应的第一感知信息;
将所述离队指令对应的第一感知信息发送至所述主车,以供所述主车根据所述离队指令对应的第一感知信息和第二感知信息,确定所述离队指令对应的行驶控制信息;
接收所述离队指令对应的行驶控制信息;
根据所述离队指令对应的行驶控制信息,进行离队行驶处理。
在一种可能的实现方式中,所述离队指令对应的行驶控制信息包括第一副车的行驶控制信息和第二副车的行驶控制信息,所述第一副车是待离队的副车,所述第二副车是跟随所述第一副车的副车,所述根据所述离队指令对应的行驶控制信息,进行离队行驶处理,包括:
根据所述第一副车的行驶控制信息,控制所述第一副车驶离队列;
根据所述第二副车的行驶控制信息,调整所述第二副车的行驶速度,以进行队列补位处理。
第二方面,本申请提供了一种无人配送车辆的行驶方法,所述方法应用于无人配送车辆系统中的主车,所述主车和副车的通信方式为无线通信,所述方法包括:
获取第一感知信息和第二感知信息,其中,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得;
根据所述第一感知信息和第二感知信息,确定行驶控制信息;
将所述行驶控制信息发送至所述副车,以供所述副车根据所述行驶控制信息,按照队列形式跟随所述主车行驶;
响应于接收到待入队的副车的入队指令,根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息;
将所述入队指令对应的行驶控制信息至所述待入队的副车,以供所述待入队的副车根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
在一种可能的实现方式中,所述方法还包括:
根据预设的队列行驶路径,确定所述副车的离队指令;
根据所述离队指令,从所述副车获取所述离队指令对应的第一感知信息;
根据所述离队指令对应的第一感知信息和第二感知信息,确定所述离队指令对应的行驶控制信息;
将所述离队指令对应的行驶控制信息发送至所述副车,以供所述副车根据所述离队指令对应的行驶控制信息,进行离队行驶处理。
在一种可能的实现方式中,所述主车的全方向设置的传感器包括雷达传感器、相机传感器、定位传感器、惯性传感器中的至少一项。
第三方面,本申请提供了一种无人配送车辆的行驶装置,所述装置应用于无人配送车辆系统中的副车,所述副车和主车的通信方式为无线通信,所述装置包括:
接收单元,用于接收所述主车发送的行驶控制信息;
跟随单元,用于根据所述行驶控制信息,按照队列形式跟随所述主车行驶;其中,
所述行驶控制信息是根据第一感知信息和第二感知信息所确定,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得;
所述接收单元,还用于响应于接收到待入队的副车的入队指令,将所述入队指令发送至所述主车,以供所述主车根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息;接收所述入队指令对应的行驶控制信息;
所述跟随单元,还用于根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
第四方面,本申请提供了一种无人配送车辆的行驶装置,所述装置应用于无人配送车辆系统中的主车,所述主车和副车的通信方式为无线通信,所述装置包括:
获取单元,用于获取第一感知信息和第二感知信息,其中,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得;
确定单元,用于根据所述第一感知信息和第二感知信息,确定行驶控制信息;
发送单元,用于将所述行驶控制信息发送至所述副车,以供所述副车根据所述行驶控制信息,按照队列形式跟随所述主车行驶;
所述确定单元,还用于响应于接收到待入队的副车的入队指令,根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息;
所述发送单元,还用于将所述入队指令对应的行驶控制信息至所述待入队的副车,以供所述待入队的副车根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
第五方面,本申请提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行以实现如第一方面所述的无人配送车辆的行驶方法。
第六方面,本申请提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行以实现如第二方面所述的无人配送车辆的行驶方法。
第七方面,本申请提供了一种无人配送车辆,所述无人配送车辆为无人配送车辆系统中的副车,包括如第五方面所述的电子设备。
第八方面,本申请提供了一种无人配送车辆,所述无人配送车辆为无人配送车辆系统中的主车,包括如第六方面所述的电子设备。
第九方面,本申请提供了一种无人配送车辆系统,所述无人配送车辆系统包括如第八方面所述的主车、以及按照队列形式跟随所述主车行驶的至少一辆如第七方面所述的副车;所述主车和每辆所述副车进行无线通信连接。
第十方面,本申请提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如第一方面或第二方面所述的无人配送车辆的行驶方法。
本申请提供的技术方案的有益效果至少包括:
由上述技术方案可知,本申请实施例中,一方面,无人配送车辆系统中的副车通过无线通信的方式接收主车发送的行驶控制信息,进而可以根据所述行驶控制信息,按照队列形式跟随所述主车行驶,其中,行驶控制信息是根据第一感知信息和第二感知信息所确定,第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得,由于副车行驶过程中可以直接利用基于主车的全方向设置的传感器获得的信息,跟随主车行驶,可以仅在副车后侧设置雷达传感器和/或相机传感器,无需在副车中设置全方向的传感器,减少了副车所安装的传感器的数量,优化了无人配送车辆的装配,从而降低了无人配送车辆的成本。
而且,可以通过副车和主车的交互,获得主车根据基于多种传感器所采集的感知信息,所确定的入队指令对应的行驶控制信息,待入队的副车可以根据该行驶控制信息,加入无人配送车辆队列,提升了无人配送车辆加入队列的灵活地和可靠性。
再一方面,无人配送车辆系统中的主车通过无线通信的方式获取第一感知信息和第二感知信息,其中,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得,进而可以根据所述第一感知信息和第二感知信息,确定行驶控制信息,使得能够将所述行驶控制信息发送至所述副车,以供所述副车根据所述行驶控制信息,按照队列形式跟随所述主车行驶,由于副车行驶过程中可以直接利用基于主车的全方向设置的传感器获得的信息,跟随主车行驶,可以仅在副车后侧设置雷达传感器和/或相机传感器,无需在副车中设置全方向的传感器,减少了副车所安装的传感器的数量,优化了无人配送车辆的装配,从而降低了无人配送车辆的成本。而且,可以在副车请求入队的情况下,通过副车和主车的交互,提升了无人配送车辆加入队列的灵活地和可靠性。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本申请一个实施例提供的无人配送车辆的行驶方法的方法流程图;
图2是本申请另一个实施例提供的无人配送车辆的行驶方法的方法流程图;
图3是本申请另一个实施例提供的无人配送车辆的行驶方法的应用场景的示意图;
图4是本申请另一个实施例提供的方法中副车离队场景的示意图;
图5是本申请另一个实施例提供的方法中副车入队场景的示意图;
图6是本申请再一实施例提供的无人配送车辆的行驶装置的结构框图;
图7是本申请再一实施例提供的无人配送车辆的行驶装置的结构框图。
具体实施方式
以下结合附图对本申请的示范性实施例做出说明,其中包括本申请实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本申请的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的全部其他实施例,都属于本申请保护的范围。
需要说明的是,本申请实施例中所涉及的终端设备可以包括但不限于手机、个人数字助理(Personal Digital Assistant,PDA)、无线手持设备、平板电脑(TabletComputer)等智能设备;显示设备可以包括但不限于个人电脑、电视等具有显示功能的设备。
目前,单车智能模式下的无人配送车辆通常装配了雷达、相机、GPS、IMU等传感器,这些传感器都是全智能的无人配送车辆不可缺失的重要组成部分,这使得无人配送车辆成本居高不下。
因此,亟需提供一种无人配送车辆的行驶方法,能够实现对无人配送车辆的装配的优化,从而降低无人配送车辆的成本。
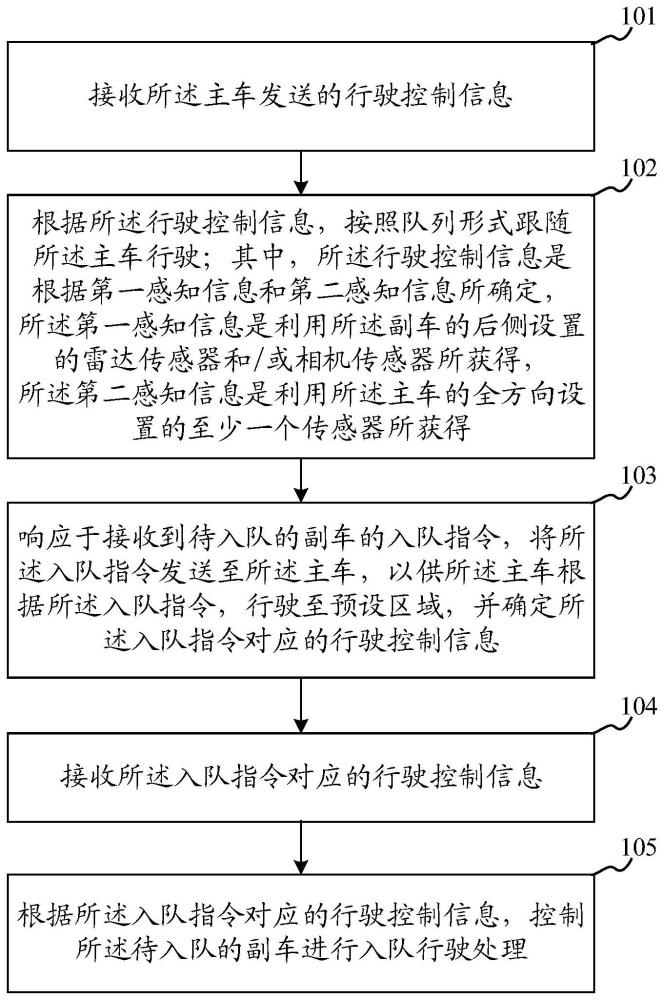
请参考图1,其示出了本申请一个实施例提供的无人配送车辆的行驶方法的方法流程图。该无人配送车辆的行驶方法,可以法应用于无人配送车辆系统中的副车,所述副车和主车的通信方式为无线通信,具体可以包括:
步骤101、接收所述主车发送的行驶控制信息。
步骤102、根据所述行驶控制信息,按照队列形式跟随所述主车行驶;其中,所述行驶控制信息是根据第一感知信息和第二感知信息所确定,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得。
步骤103、响应于接收到待入队的副车的入队指令,将所述入队指令发送至所述主车,以供所述主车根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息。
步骤104、接收所述入队指令对应的行驶控制信息。
步骤105、根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
需要说明的是,无人配送车辆系统可以是无人配送车辆队列,无人配送车辆队列可以包括主车和至少一辆副车。无人配送车辆队列可以是主车基于预设的编队策略,对至少一辆副车进行编队处理所构建。所述副车和主车的无线通信方式可以包括但不限于无线保真(wireless fidelity,Wi-Fi)网络、4G通信网络、以及5G通信网络。
可以理解的是,在副车为多辆的情况下,第一感知信息可以是每辆副车所采集的感知信息,或者,第一感知信息还可以是队列中最后一辆副车所采集的感知信息。
可以理解的是,行驶控制信息可以用于控制跟随主车行驶的副车。行驶控制信息可以包括但不限于控制副车行驶的速度信息、方向信息、路线信息等。
需要说明的是,副车的传感器可以是车辆的后侧设置的雷达传感器和/或相机传感器。
需要说明的是,步骤101~105的执行主体的部分或全部可以为位于本地终端的应用,或者还可以为设置在位于本地终端的应用中的插件或软件开发工具包(SoftwareDevelopment Kit,SDK)等功能单元,本实施例对此不进行特别限定。
可以理解的是,所述应用可以是安装在本地终端上的本地程序(nativeApp),或者还可以是本地终端上的浏览器的一个网页程序(webApp),本实施例对此不进行限定。
这样,无人配送车辆系统中的副车可以通过无线通信的方式接收主车发送的行驶控制信息,进而可以根据所述行驶控制信息,按照队列形式跟随所述主车行驶,其中,行驶控制信息是根据第一感知信息和第二感知信息所确定,第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得,由于副车行驶过程中可以直接利用基于主车的全方向设置的传感器获得的信息,跟随主车行驶,无需在副车中设置全方向的传感器,减少了副车的传感器的装配数量,优化了无人配送车辆的装配,从而降低了无人配送车辆的成本。
而且,可以通过副车和主车的交互,获得主车根据基于多种传感器所采集的感知信息,所确定的入队指令对应的行驶控制信息,待入队的副车可以根据该行驶控制信息,加入无人配送车辆队列,提升了实现无人配送车辆加入队列的灵活地和可靠性。
可选地,在本实施例的一个可能的实现方式中,首先,可以获取所述副车的离队指令。其次,根据所述离队指令,获取所述离队指令对应的第一感知信息。再次,将所述离队指令对应的第一感知信息发送至所述主车,以供所述主车根据所述离队指令对应的第一感知信息和第二感知信息,确定所述离队指令对应的行驶控制信息。再次,接收所述离队指令对应的行驶控制信息。最后,根据所述离队指令对应的行驶控制信息,进行离队行驶处理。
在本实现方式中,离队指令可以包括离队行驶区域和离队时时间等信息。离队指令对应的第一感知信息可以包括基于离队行驶区域和离队时间,利用副车的后侧设置的雷达传感器和/或相机传感器所采集的信息。第二感知信息,即离队指令对应的第二感知信息可以包括基于离队行驶区域和离队时间,利用利用主车的全方向设置的至少一个传感器所采集的信息。
在该实现方式的一个具体实现过程中,首先,可以接收主车发送的离队指令。其次,可以根据离队指令,获取实时的第一感知信息。再次,将第一感知信息发送至主车,以供主车根据离队指令对应的第一感知信息和离队指令对应的第二感知信息,确定离队指令对应的行驶控制信息。再次,接收主车所发送的离队指令对应的行驶控制信息。最后,根据离队指令对应的行驶控制信息,进行离队行驶处理。
在该具体实现过程中,副车的离队指令可以是主车根据预设的行驶路线和预设的编队信息所确定的。
在该实现方式的另一个具体实现过程中,首先,可以根据实时道路情况,获取离队指令。其次,可以根据离队指令,获取实时的第一感知信息。再次,将第一感知信息发送至主车,以供主车根据离队指令对应的第一感知信息和离队指令对应的第二感知信息,确定离队指令对应的行驶控制信息。再次,接收主车所发送的离队指令对应的行驶控制信息。最后,根据离队指令对应的行驶控制信息,进行离队行驶处理。
可以理解的是,在副车为多辆的情况下,可以获取每辆副车所采集的第一感知信息,或者,获取队列中最后一辆副车所采集的第一感知信息。
在该实现方式的再一个具体实现过程中,所述离队指令对应的行驶控制信息可以包括第一副车的行驶控制信息和第二副车的行驶控制信息。所述第一副车是待离队的副车,所述第二副车是跟随第一副车的副车,即排列在第一副车后面行驶的副车。
具体地,在根据所述离队指令对应的行驶控制信息,进行离队行驶处理的过程中,可以根据所述第一副车的行驶控制信息,控制所述第一副车驶离队列,和/或,根据所述第二副车的行驶控制信息,调整所述第二副车的行驶速度,以进行队列补位处理。
可以理解的是,若待离队的副车位于无人配送车辆队列的队尾,则该待离队的副车可以直接根据行驶控制信息,即第一副车的行驶控制信息,控制该待离队的副车驶离队列。
此外,可以理解的是,离队指令对应的行驶控制信息也可以发送至队列中全部副车,以使得除了第一副车和第二副车以外的车辆可以获知有副车离队。
这样,可以通过副车和主车的交互,获得主车根据基于多种传感器所采集的感知信息,所确定的离队指令对应的行驶控制信息,进而可以根据该行驶控制信息,控制待离队的副车可以安全地驶离无人配送车辆队列,提升了实现无人配送车辆加离队的灵活地和可靠性。同时,离队副车后方的其他副车可以进行补位,从而进一步地提升了无人配送车辆队列行驶的可靠性和安全性。
可选地,在本实施例的一个可能的实现方式中,在步骤103至步骤105种,进一步地还可以获取待入队的副车的入队指令,进而可以将所述副车的入队指令发送至所述主车,以供所述主车根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息,使得能够接收所述入队指令对应的行驶控制信息,根据所述入队指令对应的行驶控制信息,进行入队行驶处理。
在本实现方式中,该预设区域可以包括入队指令对应的副车,即待入队的副车,所停留的位置点或者位置区域。
在该实现方式的一个具体实现过程中,首先,可以根据预设的行驶路线,获取待入队的副车的入队指令。其次,可以将该入队指令发送至该副车跟随行驶的主车。再次,主车接收到入队指令后,主车可以根据入队指令,行驶至预设区域,并确定出入队指令对应的行驶控制信息,以将该行驶控制信息发送至待入队的副车。再次,待入队的副车可以接收入该行驶控制信息,并可以根据该行驶控制信息,控制待入队的副车进行入队行驶处理。
在该具体实现过程中,待入队的副车可以根据该行驶控制信息,行驶至无人配送车辆队列的队尾。
此外,可以理解的是,入队指令对应的行驶控制信息也可以发送至队列中其他副车,以使得其他副车可以获知有副车入队。
这样,可以通过副车和主车的交互,获得主车根据基于多种传感器所采集的感知信息,所确定的入队指令对应的行驶控制信息,待入队的副车可以根据该行驶控制信息,加入无人配送车辆队列,提升了实现无人配送车辆加入队列的灵活地和可靠性。
可选地,在本实施例的一个可能的实现方式中,所述主车的全方向设置的传感器包括雷达传感器、相机传感器、定位传感器、惯性传感器中的至少一项。
需要说明的是,本实现方式中所提供的具体实现过程,可以结合前述实现方式中所提供的多种具体实现过程,来实现本实施例的无人配送车辆的行驶方法。详细的描述可以参见前述实现方式中的相关内容,此处不再赘述。
图2是本申请另一个实施例提供的无人配送车辆的行驶方法的方法流程图,如图2所示。该无人配送车辆的行驶方法,可以应用于无人配送车辆系统中的主车,所述副车和主车的通信方式为无线通信,具体可以包括:
步骤201、获取第一感知信息和第二感知信息,其中,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得。
步骤202、根据所述第一感知信息和第二感知信息,确定行驶控制信息。
步骤203、将所述行驶控制信息发送至所述副车,以供所述副车根据所述行驶控制信息,按照队列形式跟随所述主车行驶。
步骤204、响应于接收到待入队的副车的入队指令,根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息。
步骤205、将所述入队指令对应的行驶控制信息至所述待入队的副车,以供所述待入队的副车根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
需要说明的是,无人配送车辆系统可以是无人配送车辆队列,无人配送车辆队列可以包括主车和至少一辆副车。所述副车和主车的无线通信方式可以包括但不限于Wi-Fi网络、4G通信网络、以及5G通信网络。
可以理解的是,在副车为多辆的情况下,第一感知信息可以是每辆副车所采集的感知信息,或者,第一感知信息还可以是编队中最后一辆副车所采集的感知信息。
需要说明的是,步骤201~205的执行主体的部分或全部可以为位于本地终端的应用,或者还可以为设置在位于本地终端的应用中的插件或软件开发工具包(SoftwareDevelopment Kit,SDK)等功能单元,本实施例对此不进行特别限定。
可以理解的是,所述应用可以是安装在本地终端上的本地程序(nativeApp),或者还可以是本地终端上的浏览器的一个网页程序(webApp),本实施例对此不进行限定。
这样,无人配送车辆系统中的主车通过无线通信的方式获取第一感知信息和第二感知信息,其中,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得,进而可以根据所述第一感知信息和第二感知信息,确定行驶控制信息,使得能够将所述行驶控制信息发送至所述副车,以供所述副车根据所述行驶控制信息,按照队列形式跟随所述主车行驶,由于副车行驶过程中可以直接利用基于主车的全方向设置的传感器所获得的信息,跟随主车行驶,无需在副车中设置全方向的传感器,减少了副车的传感器的装配数量,优化了无人配送车辆的装配,从而降低了无人配送车辆的成本。而且,可以在副车请求入队的情况下,通过副车和主车的交互,提升了无人配送车辆加入队列的灵活地和可靠性。
此外,由于副车可以仅利用后方设置的雷达传感器和/或相机传感器采集感知信息,并将采集的感知信息发送至主车进行后续地信息分析计算处理,即副车可以不对采集的感知信息进行分析计算处理,进而可以无需在副车上装配相关的感知信息分析计算处理的装置,从而进一步地优化了无人配送车辆的装配。
可选地,在本实施例的一个可能的实现方式中,首先,可以根据预设的队列行驶路径,确定所述副车的离队指令。其次,根据所述离队指令,从所述副车获取所述离队指令对应的第一感知信息。再次,根据所述离队指令对应的第一感知信息和第二感知信息,确定所述离队指令对应的行驶控制信息。最后,将所述离队指令对应的行驶控制信息发送至所述副车,以供所述副车根据所述离队指令对应的行驶控制信息,进行离队行驶处理。
在该实现方式的一个具体实现过程中,主车可以根据预设的行驶路线和预设的编队信息,确定待离队的副车和离队指令,进而该主车可以将离队指令发送至跟随该主车行驶的副车。
此外,可以理解的是,主车还可以直接从副车获取离队指令对应的第一感知信息。对于获取离队指令以及离队指令对应的第一感知信息的具体方式,在此可以不做具体限定。
可选地,在本实施例的一个可能的实现方式中,在步骤204至步骤205中,首先,可以获取待入队的副车的入队指令。其次,可以根据入队指令,行驶至预设区域,并根据入队指令确定入队指令对应的行驶控制信息。再次,将入队指令对应的行驶控制信息发送至待入队的副车,以供该副车可以根据入队指令对应的行驶控制信息,进行入队行驶处理。
在本实现方式中,该预设区域可以包括入队指令对应的副车,即待入队的副车,所停留的位置点或者位置区域。
这样,主车可以通过根据入队指令行驶至待入队的副车所停留的位置点或者位置区域,即将主车调度到副车附近,可以便于待入队的副车加入主车的队列。并且,对于没有在主车行驶路线上的待入队的副车,将可与该副车编队的主车调度到该副车附近,提升了无人配送车辆的编队效率和可靠性。
在该实现方式的一个具体实现过程中,首先,可以根据预设的行驶路线,获取待入队的副车的入队指令。其次,可以根据入队指令,行驶至预设区域,并根据入队指令确定入队指令对应的行驶控制信息。再次,将入队指令对应的行驶控制信息发送至待入队的副车,以供该副车可以根据入队指令对应的行驶控制信息,进行入队行驶处理。
在该实现方式的另一个具体实现过程中,首先,可以从远程服务平台获取待入队的副车的入队指令。其次,可以根据入队指令,行驶至预设区域,并根据入队指令确定入队指令对应的行驶控制信息。再次,将入队指令对应的行驶控制信息发送至待入队的副车,以供该副车可以根据入队指令对应的行驶控制信息,进行入队行驶处理。
此外,可以理解的是,入队指令对应的行驶控制信息也可以发送至队列中其他副车,以使得其他副车可以获知有新的副车入队。
可选地,在本实施例的一个可能的实现方式中,副车装配的传感器可以是车辆的后侧设置的雷达传感器和/或相机传感器。
可选地,在本实施例的一个可能的实现方式中,所述主车的全方向设置的传感器包括雷达传感器、相机传感器、定位传感器、惯性传感器中的至少一项。
需要说明的是,本实现方式中所提供的具体实现过程,可以结合前述实现方式中所提供的多种具体实现过程,来实现本实施例的无人配送车辆的行驶方法。详细的描述可以参见前述实现方式中的相关内容,此处不再赘述。
为了更好地说明本申请中无人配送车辆的行驶方法的方案,现结合具体应用场景进行如下的详细说明。图3是本申请另一个实施例提供的无人配送车辆的行驶方法的应用场景的示意图。如图3所示。
在本实施例中,无人配送车辆的主车N、副车S1和副车S2可以编组为一个无人配送车辆队列,即构成一个无人配送车辆系统。无人配送车辆在实际行驶运营中,主车N在队列的首部,副车S1和副车S2按照队列形式依次跟随在主车N之后。主车N与副车S1和副车S2控制指令同步,基于相同的速度和相同的行驶方向行驶。
可选地,在本实施例中,副车离队时,副车可以自动从编组队列离队,离队副车后方的副车自动向前补齐。
具体地,首先,主车N可以获取副车S1的离队指令。其次,主车N根据离队指令,从副车S1和/或副车S2获取所述离队指令对应的第一感知信息。再次,主车N可以获取离队指令对应的第二感知信息,并根据离队指令对应的第一感知信息和第二感知信息,确定离队指令对应的行驶控制信息。再次,主车N将离队指令对应的行驶控制信息发送至副车S1和/或副车S2。副车S1可以根据行驶控制信息驶离该队列,副车S2可以根据行驶控制信息进行补位行驶。如图4所示,图4是本实施例提供的方法中副车离队场景的示意图。
可选地,在本实施例中,副车入队时,副车可以自动跟随已编组队列的队尾,完成入队。
具体地,首先,主车N可以获取副车S2的入队指令。其次,可以主车N根据入队指令,行驶至预设区域,并根据入队指令确定入队指令对应的行驶控制信息。再次,主车N将入队指令对应的行驶控制信息发送至副车S2。再次,副车S2可以根据入队指令对应的行驶控制信息,进行入队行驶处理,即副车S2可以跟随已编组队列的队尾。如图5所示,图5是本实施例提供的方法中副车入队场景的示意图。
本实施例中,可以通过在副车行驶过程中直接利用基于主车的全方向设置的传感器所获得的信息,跟随主车行驶,无需在副车中设置全方向的传感器,减少了副车的传感器的装配数量,优化了无人配送车辆的装配,从而降低了无人配送车辆的成本。
此外,采用本实施中的技术方案,可以通过副车和主车的交互,获得主车根据基于多种传感器所采集的感知信息,所确定的离队指令对应的行驶控制信息,进而可以根据该行驶控制信息,控制待离队的副车可以安全地驶离无人配送车辆队列,提升了实现无人配送车辆加离队的灵活地和可靠性。同时,离队副车后方的其他副车可以进行补位,从而进一步地提升了无人配送车辆队列行驶的可靠性和安全性。
此外,采用本实施中的技术方案,可以通过副车和主车的交互,获得主车根据基于多种传感器所采集的感知信息,所确定的入队指令对应的行驶控制信息,待入队的副车可以根据该行驶控制信息,加入无人配送车辆队列,提升了实现无人配送车辆加入队列的灵活地和可靠性。
需要说明的是,对于前述的各方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本申请并不受所描述的动作顺序的限制,因为依据本申请,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定是本申请所必须的。
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
图6示出了本申请一个实施例提供的无人配送车辆的行驶装置的结构框图,如图6所示。本实施例的无人配送车辆的行驶装置600可以应用于无人配送车辆系统中的副车,所述副车和主车的通信方式为无线通信。本实施例的无人配送车辆的行驶装置600可以包括接收单元601和跟随单元602,其中,接收单元601,用于接收所述主车发送的行驶控制信息;跟随单元602,用于根据所述行驶控制信息,按照队列形式跟随所述主车行驶;其中,所述行驶控制信息是根据第一感知信息和第二感知信息所确定,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得。接收单元601,还用于响应于接收到待入队的副车的入队指令,将所述入队指令发送至所述主车,以供所述主车根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息;接收所述入队指令对应的行驶控制信息;跟随单元602,还用于根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
可选地,在本实施例的一个可能的实现方式中,跟随单元602,具体可以用于获取所述副车的离队指令,根据所述离队指令,获取所述离队指令对应的第一感知信息,将所述离队指令对应的第一感知信息发送至所述主车,以供所述主车根据所述离队指令对应的第一感知信息和第二感知信息,确定所述离队指令对应的行驶控制信息,接收所述离队指令对应的行驶控制信息,根据所述离队指令对应的行驶控制信息,进行离队行驶处理。
可选地,在本实施例的一个可能的实现方式中,所述离队指令对应的行驶控制信息包括第一副车的行驶控制信息和第二副车的行驶控制信息,所述第一副车是待离队的副车,所述第二副车是跟随所述第一副车的副车,跟随单元602,具体还可以用于根据所述第一副车的行驶控制信息,控制所述第一副车驶离队列,和/或,根据所述第二副车的行驶控制信息,调整所述第二副车的行驶速度,以进行队列补位处理。
本实施例中,无人配送车辆系统中的副车通过无线通信的方式,基于接收单元接收主车发送的行驶控制信息,进而可以由跟随单元根据所述行驶控制信息,按照队列形式跟随所述主车行驶,其中,行驶控制信息是根据第一感知信息和第二感知信息所确定,第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得,由于副车行驶过程中可以直接利用基于主车的全方向设置的传感器所获得的信息,跟随主车行驶,可以仅在副车后侧设置雷达传感器和/或相机传感器,无需在副车中设置全方向的传感器,减少了副车所安装的传感器的数量,优化了无人配送车辆的装配,从而降低了无人配送车辆的成本。而且,可以在副车请求入队的情况下,通过副车和主车的交互,提升了无人配送车辆加入队列的灵活地和可靠性。
图7示出了本申请一个实施例提供的无人配送车辆的行驶装置的结构框图,如图7所示。本实施例的无人配送车辆的行驶装置700可以应用于无人配送车辆系统中的主车,所述主车和副车的通信方式为无线通信。本实施例的无人配送车辆的行驶装置700可以包括获取单元701、确定单元702和发送单元703。其中,获取单元701,用于获取第一感知信息和第二感知信息,其中,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得;确定单元702,用于根据所述第一感知信息和第二感知信息,确定行驶控制信息;发送单元703,用于将所述行驶控制信息发送至所述副车,以供所述副车根据所述行驶控制信息,按照队列形式跟随所述主车行驶。所述确定单元702,还用于响应于接收到待入队的副车的入队指令,根据所述入队指令,行驶至预设区域,并确定所述入队指令对应的行驶控制信息;所述发送单元703,还用于将所述入队指令对应的行驶控制信息至所述待入队的副车,以供所述待入队的副车根据所述入队指令对应的行驶控制信息,控制所述待入队的副车进行入队行驶处理。
可选地,在本实施例的一个可能的实现方式中,发送单元703,具体可以用于根据预设的队列行驶路径,确定所述副车的离队指令,根据所述离队指令,从所述副车获取所述离队指令对应的第一感知信息,根据所述离队指令对应的第一感知信息和第二感知信息,确定所述离队指令对应的行驶控制信息,将所述离队指令对应的行驶控制信息发送至所述副车,以供所述副车根据所述离队指令对应的行驶控制信息,进行离队行驶处理。
可选地,在本实施例的一个可能的实现方式中,所述主车的全方向设置的传感器包括雷达传感器、相机传感器、定位传感器、惯性传感器中的至少一项。
本实施例中,无人配送车辆系统中的主车通过无线通信的方式由获取单元获取第一感知信息和第二感知信息,其中,所述第一感知信息是利用所述副车的后侧设置的雷达传感器和/或相机传感器所获得,所述第二感知信息是利用所述主车的全方向设置的至少一个传感器所获得,进而可以由确定单元根据所述第一感知信息和第二感知信息,确定行驶控制信息,使得发送单元能够将所述行驶控制信息发送至所述副车,以供所述副车根据所述行驶控制信息,按照队列形式跟随所述主车行驶,由于副车行驶过程中可以直接利用基于主车的全方向设置的传感器所获得的信息,跟随主车行驶,可以仅在副车后侧设置雷达传感器和/或相机传感器,无需在副车中设置全方向的传感器,减少了副车所安装的传感器的数量,优化了无人配送车辆的装配,从而降低了无人配送车辆的成本。而且,可以在副车请求入队的情况下,通过副车和主车的交互,提升了无人配送车辆加入队列的灵活地和可靠性。
本申请一个实施例提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行以实现如上所述的无人配送车辆系统中副车的行驶方法。
本申请一个实施例提供了一种无人配送车辆,所述无人配送车辆为无人配送车辆系统中的副车,包括如上所述的电子设备。
本申请一个实施例提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如上所述的无人配送车辆系统中主车的行驶方法。
本申请一个实施例提供了一种无人配送车辆,所述无人配送车辆为无人配送车辆系统中的主车,包括如上所述的电子设备。
本申请一个实施例提供了一种无人配送车辆系统,所述无人配送车辆系统包括如第八方面所述的主车、以及按照队列形式跟随所述主车行驶的至少一辆如第七方面所述的副车;所述主车和每辆所述副车进行无线通信连接。
本申请的技术方案中,所涉及的用户个人信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
需要说明的是:上述实施例提供的无人配送车辆的行驶装置在进行无人配送车辆的行驶时,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将无人配送车辆的行驶装置的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。另外,上述实施例提供的无人配送车辆的行驶装置与无人配送车辆的行驶方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
以上所述并不用以限制本申请实施例,凡在本申请实施例的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请实施例的保护范围之内。