一种VR镜片真空胶合装置
文献发布时间:2024-01-17 01:20:32
技术领域
本发明涉及VR镜片生产制造技术领域,特别是一种VR镜片真空胶合装置。
背景技术
随着VR在消费级市场逐步渗透,C端消费者对VR很轻薄、以及成像质量、佩戴体验提出了更高的要求,折叠光路原理的Pancake(超短焦光学折叠光路)方案以轻薄、优秀的成像质量以及逐步成熟的量产工艺,逐渐成为消费级VR光学的发展和进化方向,特别是以Meta、苹果、PICO、华为的等为代表的头部企业已经推出和即将推出Pancake方案的头显;
目前国内的曲面镜片水胶贴合设备都是在大气中进行贴合,不采用真空贴合的方式,原因是无法将对位系统集成到真空腔体上,从而导致现有的在大气中进行贴合的方式很容易产生气泡造成不良品,为此我们提供一种VR镜片真空胶合装置来解决上述问题。
发明内容
本发明的目的在于克服现有技术的缺点,提供一种VR镜片真空胶合装置。
本发明的目的通过以下技术方案来实现:
一种VR镜片真空胶合装置,包括基座和真空腔体,所述真空腔体安装在所述基座上,所述真空腔体的内部分别设置有第一治具组件和第二治具组件,所述真空腔体下方设置有用于顶升所述第一治具组件向第二治具组件方向移动的顶升装置,所述真空腔体的内底部设置有用于第一治具组件上的镜片位置检测的第一对位装置,所述真空腔体内顶部设置有用于第二治具组件上的镜片位置检测的第二对位装置。
优选的,所述顶升装置的动力输出端固定安装有升降板,所述升降板上表面安装有用于调整第一治具组件位置的下调节平台,所述真空腔体的上方设置有用于调整第二治具组件位置的上调节平台。
优选的,所述下调节平台输出端设置有连接结构,且所述连接结构的一端与所述第一治具组件连接,所述下调节平台通过所述连接结构传动对所述第一治具组件位置进行调整,所述连接结构包括安装在所述下调节平台动力输出端的第三固定板,所述第三固定板表面固定安装有若干均匀分布的第二升降杆,所述第二升降杆一端延伸至真空腔体内部与所述第一治具组件连接,每个所述第二升降杆外表面设置有第二密封波纹管。
优选的,所述上调节平台包括固定安装在所述真空腔体上表面的六轴调节平台,所述六轴调节平台的动力输出端固定安装有第一固定板,所述第一固定板底面固定安装有若干个第一升降杆,所述第一升降杆一端部延伸至真空腔体内部与所述第二治具组件连接,每个所述第一升降杆外表面设置有第一密封波纹管。
优选的,所述第一对位装置包括第若干均匀安装在所述升降板上的第三升降杆,所述第三升降杆的顶端延伸至所述真空腔体内部,延伸至所述真空腔体内部的第三升降杆的顶端固定安装有第四固定板,所述第三升降杆外表面设置有第三密封波纹管,所述第四固定板上表面安装有第一直线模组,所述第一直线模组移动端上安装有第二安装板,所述第二安装板上分别安装有第一对位CCD、第一Z向检测器和第一水平检测器。
优选的,所述第二对位装置安装在所述真空腔体内顶壁,所述第二对位装置包括与真空腔体固定连接的连接板,所述连接板表面固定安装有第二直线模组,所述第二直线模组输出移动端安装有第三安装板,所述第三安装板上分别安装有第二对位CCD、第二Z向检测器和第二水平检测器。
优选的,所述第一治具组件和第二治具组件的结构相同,所述第一治具组件包括第二固定板,所述第二固定板上安装有第一安装板,所述第一安装板上安装有治具本体,所述第一安装板两侧均设置有夹持气缸,每个所述夹持气缸的动力输出端安装有夹持块。
优选的,所述真空腔体包括真空壳体,所述真空壳体其中一侧壁上设置有入料口,所述真空壳体上设置有用于开闭入料口的入料封闭组件,所述入料封闭组件包括位于入料口处且滑动设置于真空壳体的侧壁上的滑动板,所述真空壳体侧壁上还安装有升降气缸,所述升降气缸动力输出端与所述滑动板进行连接,所述滑动板上固定安装有封闭气缸,所述封闭气缸动力输出端安装有与入料口适配的封闭板。
优选的,所述真空壳体其中一侧壁开设有抽真空口,所述抽真空口处设置有真空计,所述真空壳体的侧壁还设置有泄压阀。
优选的,所述真空壳体的一侧面处设置有维护门,所述真空壳体的侧壁上设置有可视窗,所述维护门也设置有可视窗。
本发明具有以下优点:
1、本发明通过在真空腔体内部设置第一对位装置和第二对位装置实现对位于第一治具组件和第二治具组件的镜片的位置进行检测,从而判断镜片是否达到合适位置,从而在真空环境即可实现位置检测,使镜片胶合在真空环境中完成,减少胶合过程中气泡产生造成不良。
2、本发明在升降板上安装用于调节第一治具组件的下调节平台,以及在真空腔体上方设置调节第二治具组件的上调节平台,通过第一对位装置和第二对位装置检测得到的位置信息反馈到下调节平台和上调节平台,通过反馈的数据信息对第一治具组件和第二治具组件进行调节,实现在真空环境下实现对治具的位置调节,方便镜片的胶合。
3、本发明通过在第二升降杆外表面设置第二密封波纹管能够密封第二升降杆与真空腔体的连接处,并且能够跟随着第二升降杆上升或者下降实现密封,防止真空腔体发生真空泄漏。
附图说明
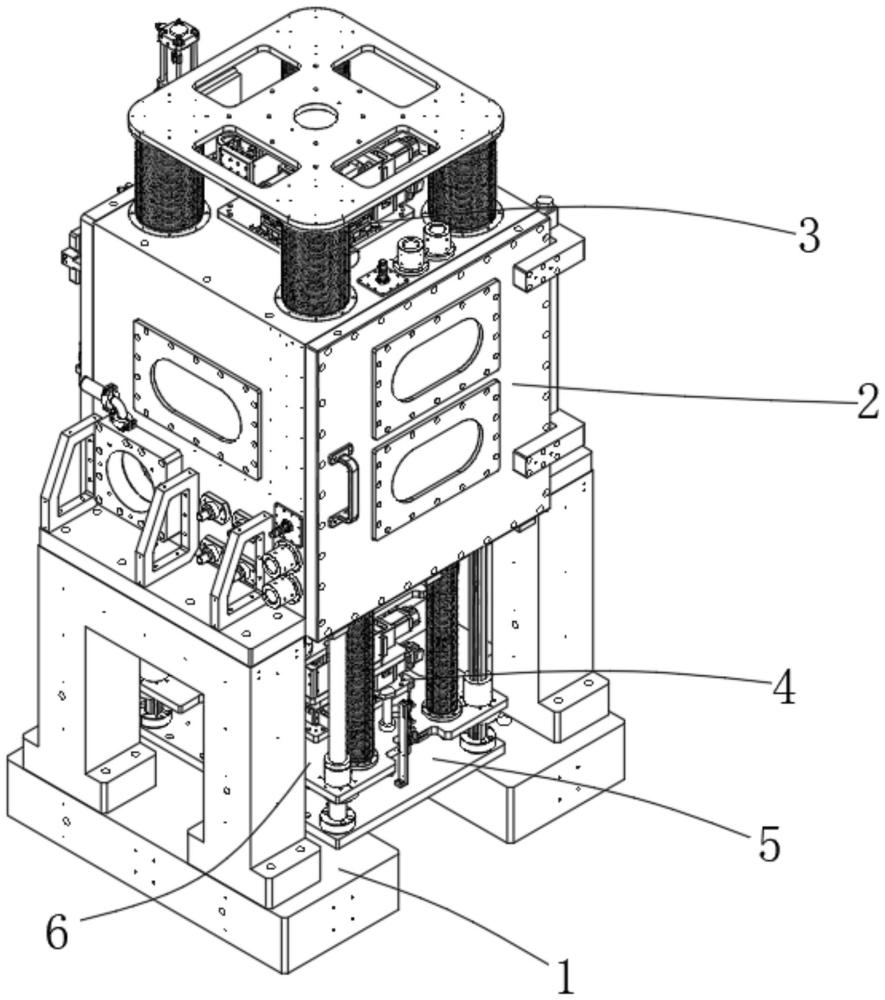
图1为本发明的整体第一视角示意图。
图2为本发明的整体第二视角示意图。
图3为本发明的下调节平台、连接机构和第一治具组件安装状态示意图。
图4为本发明的第一对位装置结构示意图。
图5为本发明的第二对位装置结构示意图。
图6为本发明的真空腔体结构示意图。
图7为本发明的上调节平台结构示意图。
图8为本发明的第一治具组件和第二治具组件立体示意图。
图9为本发明的治具本体结构示意图。
图10为本发明的图2中A处放大示意图。
图中,1、基座;2、真空腔体;21、真空壳体;22、维护门;23、可视窗;24、抽真空口;25、真空计;26、泄压阀;27、入料口;3、上调节平台;31、六轴调节平台;32、第一固定板;33、第一密封波纹管;34、第一升降杆;4、下调节平台;5、顶升装置;6、升降板;7、第一治具组件;71、第二固定板;72、第一安装板;73、夹持气缸;74、夹持块;75、治具本体;8、连接结构;81、第三固定板;82、第二升降杆;83、第二密封波纹管;9、第一对位装置;91、第四固定板;92、第一直线模组;93、第二安装板;94、第一对位CCD;95、第一Z向检测器;96、第一水平检测器;97、第三升降杆;98、第三密封波纹管;10、第二对位装置;101、连接板;102、第二直线模组;103、第三安装板;104、第二对位CCD;105、第二Z向检测器;106、第二水平检测器;11、第二治具组件;12、入料封闭组件;121、升降气缸;122、滑动板;123、封闭气缸;124、封闭板。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。通常在此处附图中描述和示出的本发明实施方式的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
如图1—10所示的实施例。
一种VR镜片真空胶合装置,包括基座1和真空腔体2,所述真空腔体2安装在所述基座1上,所述真空腔体2的内部分别设置有第一治具组件7和第二治具组件11,所述真空腔体2下方设置有用于顶升所述第一治具组件7向第二治具组件11方向移动的顶升装置5,所述真空腔体2的内底部设置有用于第一治具组件7上的镜片位置检测的第一对位装置9,所述真空腔体2内顶部设置有用于第二治具组件11上的镜片位置检测的第二对位装置10。
所述顶升装置5的动力输出端固定安装有升降板6,所述升降板6上表面安装有用于调整第一治具组件7位置的下调节平台4,所述真空腔体2的上方设置有用于调整第二治具组件11位置的上调节平台3。
参照图1至图3所示,通过在真空腔体2内部设置第一对位装置9和第二对位装置10实现对位于第一治具组件7和第二治具组件11的镜片的位置进行检测,从而判断镜片是否达到合适位置,从而在真空环境即可实现位置检测,使镜片胶合在真空环境中完成,减少胶合过程中产生气泡造成不良;在升降板6上安装用于调节第一治具组件7的下调节平台4,以及在真空腔体2上方设置调节第二治具组件11的上调节平台3,通过第一对位装置9和第二对位装置10检测得到的位置信息反馈到下调节平台4和上调节平台3,通过反馈的数据信息对第一治具组件7和第二治具组件11进行调节,实现在真空环境下实现对治具的位置调节,方便镜片的胶合;当下调节平台4和上调节平台3在初次对第一治具组件7和第二治具组件11调解完毕后,再次通过第一对位装置9和第二对位装置10重新对位检测,确认镜片位置达到预定位置后,启动顶升装置5带动第一治具组件7向上移动将两片镜片进行胶合,贴合完毕后,然后取出,取出完毕后,各个部件恢复至初始位置,方便下一工序继续。
参照图1和图3所示,在升降板6的下方设置有顶升电机(图未标注),顶升电机带动升降板6在导柱(图未标注)的导向作用下向上或者向下移动,该部分为现有技术,具体原理这里不再详细介绍,还可以为其他能够带动升降板6升降的机构,包括上述结构但不限于。
所述下调节平台4输出端设置有连接结构8,且所述连接结构8的一端与所述第一治具组件7连接,所述下调节平台4通过所述连接结构8传动对所述第一治具组件7位置进行调整,所述连接结构8包括安装在所述下调节平台4动力输出端的第三固定板81,所述第三固定板81表面固定安装有若干均匀分布的第二升降杆82,所述第二升降杆82一端延伸至真空腔体2内部与所述第一治具组件7连接,每个所述第二升降杆82外表面设置有第二密封波纹管83。
参照图3和图6所示,当顶升装置5带动下调节平台4向上移动的时候,通过第三固定板81和第二升降杆82连接下也使第一治具组件7向上或者向下移动,在移动过程中第二升降杆82与真空腔体2进行滑动连接,通过第二密封波纹管83将第二升降杆82与真空腔体2滑动连接部分进行封闭,从而形成一个密封的环境,当真空腔体2中进行抽真空的时候防止真空发生泄漏,起到了一个密封的作用,在实际中,为了考虑到下调节平台4带动连接结构8在横向方向移动不发生运动干涉,真空腔体2上开设的供第二升降杆82通过的孔可以大于第二升降杆82的直径,从而给第二升降杆82预留横向移动的空间,防止运动干涉,具体的尺寸可以根据需要自行设计。
在本实施例中,下调节平台4具体为六轴调节平台,六轴调节平台通过第三固定板81和第二升降杆82对第一治具组件7进行位置调节,从而对位于第一治具组件7上的镜片进行调节。
所述上调节平台3包括固定安装在所述真空腔体2上表面的六轴调节平台31,所述六轴调节平台31的动力输出端固定安装有第一固定板32,所述第一固定板32底面固定安装有若干个第一升降杆34,所述第一升降杆34一端部延伸至真空腔体2内部与所述第二治具组件11连接,每个所述第一升降杆34外表面设置有第一密封波纹管33。
参照图7所示,在需要进行对第二治具组件11调节位置的时候,通过第一固定板32和第一升降杆34的传动使第二治具组件11移动来调节第二治具组件11的位置,通过在第一升降杆34外表面设置第一密封波纹管33能够对第一升降杆34与真空腔体2连接处的空隙进行密封,防止真空腔体2内部与外部连通,具体的第一密封波纹管33一端与真空腔体2表面连接密封,第一密封波纹管33另一端与第一固定板32进行连接密封,从而将第一升降杆34与真空腔体2连通的空隙位于第一密封波纹管33中,从而形成密封环境;再具体的,为了考虑到六轴调节平台31带动第一升降杆34移动可能与真空腔体2发生运动干涉,第一升降杆34延伸穿过真空腔体2表面的孔隙可大于第一升降杆34的直径,保证第一升降杆34在横向移动调节的时候具有可移动的空间,防止第一升降杆34与真空腔体2碰撞造成运动干涉。
所述第一对位装置9包括若干均匀安装在所述升降板6上的第三升降杆97,所述第三升降杆97的顶端延伸至所述真空腔体2内部,延伸至所述真空腔体2内部的第三升降杆97的顶端固定安装有第四固定板91,所述第三升降杆97外表面设置有第三密封波纹管98,所述第四固定板91上表面安装有第一直线模组92,所述第一直线模组92移动端上安装有第二安装板93,所述第二安装板93上分别安装有第一对位CCD94、第一Z向检测器95和第一水平检测器96。
所述第二对位装置10安装在所述真空腔体2内顶壁,所述第二对位装置10包括与真空腔体2固定连接的连接板101,所述连接板101表面固定安装有第二直线模组102,所述第二直线模组102输出移动端安装有第三安装板103,所述第三安装板103上分别安装有第二对位CCD104、第二Z向检测器105和第二水平检测器106。
参照图4和图5所示,第三升降杆97安装在升降板6上,第三升降杆97跟随着升降板6升降而升降,由于第三升降杆97升降从而第四固定板91也进行升降,第三升降杆97一端穿过真空腔体2表面延伸至真空腔体2内部,第三升降杆97与第四固定板91进行连接,在镜片对第一治具组件7和第二治具组件11进行上料完毕后,启动第一直线模组92带动第一对位CCD94、第一Z向检测器95和第一水平检测器96进行移动,分别对位于第一治具组件7上的镜片定位以及水平和Z轴进行检测,检测完毕后的位置数据输送至下调节平台4中,通过下调节平台4对第一治具组件7的位置进行调节,调节完毕后,通过第一直线模组92带动第一对位CCD94、第一Z向检测器95和第一水平检测器96的位置进行重新检测来判断镜片位置是否达到预定位置;
同样的,通过第二直线模组102启动打动第二对位CCD104、第二Z向检测器105和第二水平检测器106移动对位于第二治具组件11上的镜片位置检测,检测完毕后将数据信息传递至六轴调节平台31中,六轴调节平台31通过第一固定板32和第一升降杆34传动对第二治具组件11的位置进行调节,从而使第二治具组件11上的镜片调节至预定位置。
所述第一治具组件7和第二治具组件11的结构相同,所述第一治具组件7包括第二固定板71,所述第二固定板71上安装有第一安装板72,所述第一安装板72上安装有治具本体75,所述第一安装板72两侧均设置有夹持气缸73,每个所述夹持气缸73的动力输出端安装有夹持块74。
参照图8所述,在本实施例中,通过机械手将要胶合的镜片上料至位于第一安装板72上的治具本体75上,上料完毕后启动两侧的夹持气缸73,通过夹持气缸73对镜片进行夹持固定住;在本实施中,可以采用六轴机械手对镜片进行上料,同样的,第二治具组件11上料步骤和工作原理与第一治具组件7相同,这里不再详细阐述。
所述真空腔体2包括真空壳体21,所述真空壳体21其中一侧壁上设置有入料口27,所述真空壳体21上设置有用于开闭入料口27的入料封闭组件12,所述入料封闭组件12包括位于入料口27处且滑动设置于真空壳体21的侧壁上的滑动板122,所述真空壳体21侧壁上还安装有升降气缸121,所述升降气缸121动力输出端与所述滑动板122进行连接,所述滑动板122上固定安装有封闭气缸123,所述封闭气缸123动力输出端安装有与入料口27适配的封闭板124。
参照图2、图6和图10所示,当镜片被上料至第一治具组件7和第二治具组件11后,通过启动升降气缸121带动滑动板122和封闭板124移动至入料口27位置处,接下来启动封闭气缸123带动封闭板124对入料口27进行封闭,当需要打开时,反向操作上述步骤即可。
所述真空壳体21其中一侧壁开设有抽真空口24,所述抽真空口24处设置有真空计25,所述真空壳体21的侧壁还设置有泄压阀26。
所述真空壳体21的一侧面处设置有维护门22,所述真空壳体21的侧壁上设置有可视窗23,所述维护门22也设置有可视窗23。
参照图6所示,当对第一治具组件7和第二治具组件11上料后,通过入料封闭组件12对入料口27进行封闭,接下来通过抽真空口24对真空壳体21内部进行抽真空至预定值,第一对位装置9和第二对位装置10对镜片位置进行检测,检测完毕后位置信分别传递至下调节平台4和六轴调节平台31对第一治具组件7和第二治具组件11进行位置调节,调节完毕后顶升装置5对第一治具组件7顶升与第二治具组件11结合对镜片进行贴合。
在此过程中,当镜片被上料至第一治具组件7和第二治具组件11后,可以先进行对位调节,然后再关闭入料口27进行抽真空,具体的步骤可以根据需要进行设定,这里不进行限纸
本发明的工作过程如下:首先将镜片上料至第一治具组件7和第二对位装置10的位置固定,接下来关闭入料口27通过抽真空口24对真空壳体21内部进行抽真空至预定值,然后通过第一对位装置9和第二对位装置10镜片位置进行检测,检测完毕后分别将检测得到的数据通过处理传递至下调节平台4和六轴调节平台31,对镜片的位置进行调节,调节完毕后第一对位装置9和第二对位装置10再次对镜片的位置进行检测判断是否达到预定位置,当达到预定位置后启动顶升装置5带动第一治具组件7向第二治具组件11的方向移动从而使两片镜片胶合,两个镜片贴合完毕后,通过打开入料口27将贴合完毕的镜片取出,完成镜片的胶合。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。