汽车总装线的防漏控制系统及方法
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及汽车生产技术领域,尤其涉及一种汽车总装线的防漏控制系统及方法。
背景技术
汽车企业总装车间使用电动工具紧固螺栓,以固定汽车零件。在实际生产中,电动工具容易出现漏固定的现象,目前一般是通过人工逐一对已进行紧固处理的车体进行扭力检查,从而检测是否存在有漏固定缺陷的车体,并阻止有漏固定缺陷的车体流出。本发明人在实施本发明的过程中发现,现有技术中汽车总装线的防漏控制在很大程度上依赖于人工,自动化程度低。
发明内容
本发明实施例提供一种汽车总装线的防漏控制系统及方法,能有效解决现有技术中汽车总装线的防漏控制在很大程度上依赖于人工、自动化程度低的问题。
本发明一实施例提供一种汽车总装线的防漏控制系统,包括:
车体进入识别装置,其用于在检测到车体进入汽车总装线的电动工具的工作区域时,输出车体进入信号至控制装置;
车体离开识别装置,其用于在检测到车体离开所述电动工具的工作区域时,输出车体离开信号至所述控制装置;
所述控制装置,其与所述汽车总装线的电动工具控制装置和运输链条控制装置连接,其具体用于:
响应于接收到所述车体进入信号,通过所述电动工具控制装置控制所述电动工具对所述车体进行紧固处理;
响应于接收到所述车体离开信号,从所述电动工具控制装置中获取所述电动工具在所述车体上固定的紧固件的数量;
当判断到所述紧固件的数量与预设紧固数量不相等时,通过所述运输链条控制装置控制所述汽车总装线的运输链条停止运行。
作为上述方案的改进,所述车体的后尾箱盖为打开状态;
所述车体进入识别装置设置在靠近所述电动工具的工作区域的入口处;
所述车体进入识别装置包括第一距离检测模块、第二距离检测模块和第一处理模块;其中,所述第一距离检测模块和所述第二距离检测模块均安装在高处;
所述第一距离检测模块与所述入口之间的水平距离比所述第二距离检测模块与所述入口之间的水平距离大第一距离预设值;所述第一距离预设值为所述车体的车顶上的任一点与所述车体的后尾箱盖的远离车头的一端上的任一点之间的水平距离;
所述第一距离检测模块,用于检测所述第一距离检测模块下方的障碍物与所述第一距离检测模块之间的第一距离值;
所述第二距离检测模块,用于检测所述第二距离检测模块下方的障碍物与所述第二距离检测模块之间的第二距离值;
所述第一处理模块,用于实时根据检测到的所述第一距离值和所述第二距离值判断是否满足车体进入条件,并在判断到满足所述车体进入条件时,输出车体进入信号至所述控制装置。
作为上述方案的改进,所述车体进入条件具体为:
所述第一距离值小于在同一时刻检测到的所述第二距离值。
作为上述方案的改进,所述车体进入条件具体为:
所述第二距离值减去在同一时刻检测到的所述第一距离值所得之差与第二距离预设值之间的差值的绝对值小于预设的误差阈值;其中,所述第二距离预设值为所述车体的后尾箱盖的远离车头的一端上的所述任一点与所述车体的车顶上的所述任一点之间的垂直距离。
作为上述方案的改进,所述车体离开识别装置设置在靠近所述电动工具的工作区域的出口处;
所述车体离开识别装置包括第三距离检测模块、第四距离检测模块和第二处理模块;其中,所述第三距离检测模块和所述第四距离检测模块均安装在高处;
所述第三距离检测模块与所述出口之间的水平距离比所述第四距离检测模块与所述出口之间的水平距离小所述第一距离预设值;
所述第三距离检测模块,用于检测所述第三距离检测模块下方的障碍物与所述第三距离检测模块之间的第三距离值;
所述第四距离检测模块,用于检测所述第四距离检测模块下方的障碍物与所述第四距离检测模块之间的第四距离值;
所述第二处理模块,用于实时根据检测到的所述第三距离值和所述第四距离值判断是否满足车体离开条件,并在判断到满足所述车体离开条件时,输出车体离开信号至所述控制装置。
作为上述方案的改进,所述车体离开条件具体为:
所述第三距离值小于在同一时刻检测到的所述第四距离值。
作为上述方案的改进,所述车体离开条件具体为:
所述第四距离值减去在同一时刻检测到的所述第三距离值所得之差与所述第二距离预设值之间的差值的绝对值小于所述误差阈值。
作为上述方案的改进,所述第一距离检测模块、所述第二距离检测模块、所述第三距离检测模块和所述第四距离检测模块均为红外线光电开关。
作为上述方案的改进,所述控制系统还包括报警装置;
所述控制装置,还与所述报警装置连接,所述控制装置还用于:
在通过所述运输链条控制装置控制所述运输链条停止运作的同时,控制所述报警装置发出警报。
本发明另一实施例提供一种汽车总装线的防漏控制方法,应用于如上任一项所述的汽车总装线的防漏控制系统,包括:
所述控制装置响应于接收到由所述车体进入识别装置发来的车体进入信号,通过所述电动工具控制装置控制所述电动工具对车体进行紧固处理;
所述控制装置响应于接收到由所述车体离开识别装置发来的车体离开信号,从所述电动工具控制装置中获取所述电动工具在所述车体上固定的紧固件的数量;
所述控制装置当判断到所述紧固件的数量与预设紧固数量不相等时,通过所述运输链条控制装置控制所述汽车总装线的运输链条停止运行。
与现有技术相比,本发明实施例提供的汽车总装线的防漏控制系统及方法,通过车体进入识别装置检测车体是否进入汽车总装线的电动工具的工作区域;通过车体离开识别装置检测所述车体是否离开所述电动工具的工作区域;当车体进入所述电动工具的工作区域时,由控制装置通过所述汽车总装线的电动工具控制装置控制所述电动工具对所述车体进行紧固处理;当车体离开所述电动工具的工作区域时,由所述控制装置从所述电动工具控制装置中获取所述电动工具在所述车体上固定的紧固件的数量,并当判断到所述紧固件的数量与预设紧固数量不相等时,由所述控制装置通过所述运输链条控制装置控制所述汽车总装线的运输链条停止运行。由上述分析可知,本发明实施例所提供的汽车总装线的防漏控制系统及方法,能够自动识别车体是否进入或离开汽车总装线的电动工具的工作区域,从而保证所获取的电动工具在所述车体上固定的紧固件的数量的准确性,并且能根据所述紧固件的数量和预设紧固数量自动判断是否发生漏固定,并在判断到发生漏固定时使所述汽车总装线的运输链条停止运行,从而防止有漏固定缺陷的车体流出,因此能够有效解决现有技术中汽车总装线的防漏控制在很大程度上依赖于人工、自动化程度低的问题。
附图说明
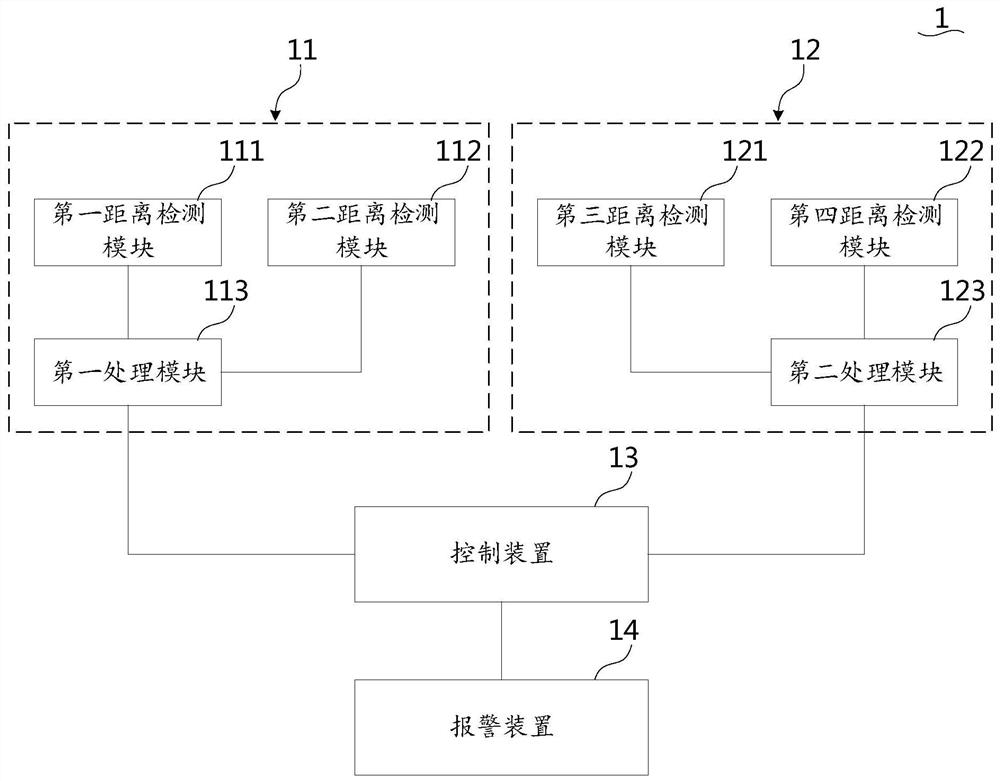
图1是本发明一实施例提供的一种汽车总装线的防漏控制系统的结构示意图;
图2是本发明一实施例提供的一种汽车总装线的悬挂链的结构示意图;
图3是本发明一实施例提供的一种汽车总装线的滑板链的结构示意图;
图4是本发明一实施例提供的一种汽车总装线的防漏控制系统的具体应用场景示意图;
图5是本发明一实施例提供的一种汽车总装线的防漏控制方法的流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参见图1,是本发明一实施例提供的一种汽车总装线的防漏控制系统的结构示意图。
本发明实施例提供的汽车总装线的防漏控制系统1,包括车体进入识别装置11、车体离开识别装置12和控制装置13。
所述车体进入识别装置11,其用于在检测到车体进入汽车总装线的电动工具的工作区域时,输出车体进入信号至所述控制装置13。
所述车体离开识别装置12,其用于在检测到车体离开所述电动工具的工作区域时,输出车体离开信号至所述控制装置13。
所述控制装置13,其与所述汽车总装线的电动工具控制装置和运输链条控制装置连接,其具体用于:
响应于接收到所述车体进入信号,通过所述电动工具控制装置控制所述电动工具对所述车体进行紧固处理;
响应于接收到所述车体离开信号,从所述电动工具控制装置中获取所述电动工具在所述车体上固定的紧固件的数量;
当判断到所述紧固件的数量与预设紧固数量不相等时,通过所述运输链条控制装置控制所述汽车总装线的运输链条停止运行。
本发明实施例所提供的汽车总装线的防漏控制系统的工作原理为:当汽车总装线工作时,汽车总装线的运输链条将车体运往电动工具的工作区域,以进行紧固处理;车体进入识别装置11在检测到该车体进入电动工具的工作区域时,输出车体进入信号至控制装置13;控制装置13响应于接收到车体进入信号,通过汽车总装线的电动工具控制装置控制电动工具对该车体进行紧固处理,并记录本次紧固处理中电动工具在该车体上总共固定的紧固件的数量;紧固完成后,运输链条将该车体运离电动工具的工作区域,车体离开识别装置12在检测到该车体离开电动工具的工作区域时,输出车体离开信号至控制装置13;控制装置13响应于接收到车体离开信号,从电动工具控制装置中获取电动工具在该车体上固定的紧固件的数量,并判断电动工具在该车体上固定的紧固件的数量与预设紧固数量是否相等,若否,则说明可能出现漏固定的现象,此时通过汽车总装线的运输链条控制装置控制运输链条停止运行,以防止有漏固定缺陷的车体流出。
需要说明的是,电动工具在每次固定紧固件后都会在电动工具控制装置中进行记录,因此,可以是根据该车体进入的时间和车体离开的时间从电动工具控制装置中获取电动工具在该车体上固定的紧固件的数量。由于本发明实施例所提供的汽车总装线的防漏控制系统1,能够准确地识别车体是否进入或离开汽车总装线的电动工具的工作区域,因此能够保证所获取的电动工具在所述车体上固定的紧固件的数量的准确性。
可以理解的,电动工具通过与外部设备联锁,确定一台车的定位信息,可以达到QA机A的保证能力,其中,QA机A指可以在出现异常时可以直接停链保证异常不流出的设备,其品质保证能力达最高级别要求。在现有技术中,总装车间的电动工具目前仅在悬挂链岗位实现QA机A保证能力,而对于非悬挂链岗位的电动工具,后工序依然要保留扭力检查防漏,存在极大的改善空间。值得说明的是,本发明实施例提供的汽车总装线的防漏控制系统1不受汽车总装线的运输链条的类型限制,可适用于不同类型的运输链条,例如如图2所示的悬挂链或是如图3所示的滑板链,使得总装车间的电动工具在非悬挂链岗位亦能实现QA机A保证能力,并且也不受车身载具限制,可适用于不同载具。
本发明实施例提供的汽车总装线的防漏控制系统,通过车体进入识别装置检测车体是否进入汽车总装线的电动工具的工作区域;通过车体离开识别装置检测所述车体是否离开所述电动工具的工作区域;当车体进入所述电动工具的工作区域时,由控制装置通过所述汽车总装线的电动工具控制装置控制所述电动工具对所述车体进行紧固处理;当车体离开所述电动工具的工作区域时,由所述控制装置从所述电动工具控制装置中获取所述电动工具在所述车体上固定的紧固件的数量,并当判断到所述紧固件的数量与预设紧固数量不相等时,由所述控制装置通过所述运输链条控制装置控制所述汽车总装线的运输链条停止运行。由上述分析可知,本发明实施例所提供的汽车总装线的防漏控制系统,能够自动识别车体是否进入或离开汽车总装线的电动工具的工作区域,从而保证所获取的电动工具在所述车体上固定的紧固件的数量的准确性,并且能根据所述紧固件的数量和预设紧固数量自动判断是否发生漏固定,并在判断到发生漏固定时使所述汽车总装线的运输链条停止运行,从而防止有漏固定缺陷的车体流出,因此能够有效解决现有技术中汽车总装线的防漏控制在很大程度上依赖于人工、自动化程度低的问题。
作为其中一个可选的实施例,参见图4,所述车体的后尾箱盖为打开状态;
所述车体进入识别装置11设置在靠近所述电动工具的工作区域的入口处;
所述车体进入识别装置11包括第一距离检测模块111、第二距离检测模块112和第一处理模块113(图4中未示出);其中,所述第一距离检测模块111和所述第二距离检测模块112均安装在高处;
所述第一距离检测模块111与所述入口之间的水平距离比所述第二距离检测模块112与所述入口之间的水平距离大第一距离预设值;所述第一距离预设值为所述车体的车顶上的任一点与所述车体的后尾箱盖的远离车头的一端上的任一点之间的水平距离;
所述第一距离检测模块111,用于检测所述第一距离检测模块111下方的障碍物与所述第一距离检测模块111之间的第一距离值;
所述第二距离检测模块112,用于检测所述第二距离检测模块112下方的障碍物与所述第二距离检测模块112之间的第二距离值;
所述第一处理模块113,用于实时根据检测到的所述第一距离值和所述第二距离值判断是否满足车体进入条件,并在判断到满足所述车体进入条件时,输出车体进入信号至所述控制装置13。
在本实施例中,通过设置第一距离检测模块和第二距离检测模块,能够取车体的两个不同位置作为车体进入的识别特征点,可避免人体或其他单一高度的物件进入识别区域而造成的误判,提高车体进入识别的准确性,从而提高防漏控制的准确性。
优选地,所述车体进入条件具体为:
所述第一距离值小于在同一时刻检测到的所述第二距离值。
可以理解的,一般来说,汽车的后尾箱盖打开后,其远离车头的一端高于车顶,由于该车体的后尾箱盖为打开状态,车体的后尾箱盖的远离车头的一端上的任一点应高于该车体的车顶上的任一点,因此,当第一距离值小于在同一时刻检测到的第二距离值时,说明是有车体进入电动工具的工作区域的入口处,可见,通过设定车体进入条件为第一距离值小于在同一时刻检测到的第二距离值,能够进一步防止表面高度一致的物体进入识别区域时误判为车体进入,可以更加准确地识别车体的进入情况。
更优选地,所述车体进入条件具体还可以为:
所述第二距离值减去在同一时刻检测到的所述第一距离值所得之差与第二距离预设值之间的差值的绝对值小于预设的误差阈值;其中,所述第二距离预设值为所述车体的后尾箱盖表面上的所述任一点与所述车体的车顶上的所述任一点之间的垂直距离。
其中,在具体实施时,所述误差阈值可以是根据实际需求进行设定,在此不做限制。
需要说明的是,通过设定车体进入条件为第二距离值减去在同一时刻检测到的第一距离值所得之差与第二距离预设值之间的差值的绝对值小于预设的误差阈值,能够进一步防止表面高度不一致的物体进入识别区域时误判为车体进入,从而能够进一步提高车体进入识别的精确度。
进一步地,参见图4,所述车体离开识别装置12设置在靠近所述电动工具的工作区域的出口处;
所述车体离开识别装置12包括第三距离检测模块121、第四距离检测模块122和第二处理模块123(图4中未示出);其中,所述第三距离检测模块121和所述第四距离检测模块122均安装在高处;
所述第三距离检测模块121与所述出口之间的水平距离比所述第四距离检测模块122与所述出口之间的水平距离小所述第一距离预设值;
所述第三距离检测模块121,用于检测所述第三距离检测模块121下方的障碍物与所述第三距离检测模块121之间的第三距离值;
所述第四距离检测模块122,用于检测所述第四距离检测模块122下方的障碍物与所述第四距离检测模块122之间的第四距离值;
所述第二处理模块123,用于实时根据检测到的所述第三距离值和所述第四距离值判断是否满足车体离开条件,并在判断到满足所述车体离开条件时,输出车体离开信号至所述控制装置13。
在本实施例中,通过设置第三距离检测模块和第四距离检测模块,能够取车体的两个不同位置作为车体离开的识别特征点,可避免人体或其他单一高度的物件进入识别区域而造成的误判,提高车体离开识别的准确性,从而提高防漏控制的准确性。
优选地,所述车体离开条件具体为:
所述第三距离值小于在同一时刻检测到的所述第四距离值。
可以理解的,一般来说,汽车的后尾箱盖打开后,其远离车头的一端高于车顶,由于该车体的后尾箱盖为打开状态,车体的后尾箱盖的远离车头的一端上的任一点应高于该车体的车顶上的任一点,因此,当第三距离值小于在同一时刻检测到的第四距离值时,说明是有车体进入电动工具的工作区域的入口处,可见,通过设定车体进入条件为第三距离值小于在同一时刻检测到的第四距离值,能够进一步防止表面高度一致的物体进入识别区域时误判为车体离开,可以更加准确地识别车体的离开情况。
更优选地,所述车体离开条件具体还可以为:
所述第四距离值减去在同一时刻检测到的所述第三距离值所得之差与所述第二距离预设值之间的差值的绝对值小于所述误差阈值。
需要说明的是,通过设定车体进入条件为第四距离值减去在同一时刻检测到的第三距离值所得之差与第二距离预设值之间的差值的绝对值小于预设的误差阈值,能够进一步防止表面高度不一致的物体进入识别区域时误判为车体离开,从而能够进一步提高车体离开识别的精确度。
具体地,所述第一距离检测模块111、所述第二距离检测模块112、所述第三距离检测模块121和所述第四距离检测模块122均为红外线光电开关。
需要说明的是,由于红外线光电开关不受其他光源的干扰和使用环境的限制,具有工作可靠、抗干扰能力强、响应速度快、寿命长等优点,而且,红外线是不可见光,意味着红外线光电开有一定的隐蔽性,在本实施例中,通过采用红外线光电开关作为所述第一距离检测模块、所述第二距离检测模块、所述第三距离检测模块和所述第四距离检测模块,能够提高防漏控制的响应速度和准确度,还能够避免对汽车的生产造成影响。
作为其中一个可选的实施例,所述控制系统1还包括报警装置14;
所述控制装置13,还与所述报警装置14连接,所述控制装置13还用于:
在通过所述运输链条控制装置控制所述运输链条停止运作的同时,控制所述报警装置14发出警报。
在本实施例中,通过设置报警装置,并由控制装置在判断到出现漏固定的现象时,控制报警装置发出警报,从而及时提醒工作人员进行排查返修。
相应地,本发明一实施例提供了一种汽车总装线的防漏控制方法,能够应用于如上任一实施例所述的汽车总装线的防漏控制系统。
参见图5,是本发明一实施例提供的一汽车总装线的防漏控制方法的流程示意图,包括:
S21、所述控制装置响应于接收到由所述车体进入识别装置发来的车体进入信号,通过所述电动工具控制装置控制所述电动工具对车体进行紧固处理;
S22、所述控制装置响应于接收到由所述车体离开识别装置发来的车体离开信号,从所述电动工具控制装置中获取所述电动工具在所述车体上固定的紧固件的数量;
S23、所述控制装置当判断到所述紧固件的数量与预设紧固数量不相等时,通过所述运输链条控制装置控制所述汽车总装线的运输链条停止运行。
其中,本实施例所提供的汽车总装线的防漏控制方法的相关具体描述可以参考上述的汽车总装线的防漏控制系统的各实施例的相关具体描述内容,在此不再赘述。
本发明实施例提供的汽车总装线的防漏控制方法,通过车体进入识别装置检测车体是否进入汽车总装线的电动工具的工作区域;通过车体离开识别装置检测所述车体是否离开所述电动工具的工作区域;当车体进入所述电动工具的工作区域时,由控制装置通过所述汽车总装线的电动工具控制装置控制所述电动工具对所述车体进行紧固处理;当车体离开所述电动工具的工作区域时,由所述控制装置从所述电动工具控制装置中获取所述电动工具在所述车体上固定的紧固件的数量,并当判断到所述紧固件的数量与预设紧固数量不相等时,由所述控制装置通过所述运输链条控制装置控制所述汽车总装线的运输链条停止运行。由上述分析可知,本发明实施例所提供的汽车总装线的防漏控制方法,能够自动识别车体是否进入或离开汽车总装线的电动工具的工作区域,从而保证所获取的电动工具在所述车体上固定的紧固件的数量的准确性,并且能根据所述紧固件的数量和预设紧固数量自动判断是否发生漏固定,并在判断到发生漏固定时使所述汽车总装线的运输链条停止运行,从而防止有漏固定缺陷的车体流出,因此能够有效解决现有技术中汽车总装线的防漏控制在很大程度上依赖于人工、自动化程度低的问题。
需说明的是,以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。另外,本发明提供的装置实施例附图中,模块之间的连接关系表示它们之间具有通信连接,具体可以实现为一条或多条通信总线或信号线。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 汽车总装线的防漏控制系统及方法
- 汽车总装线的防漏控制系统及方法